Стабилизация обратного маятника на двухколесном транспортном средстве

Автор: Ряжских В.И., Семенов М.Е., Рукавицын А.Г., Канищева О.И., Демчук А.А., Мелешенко П.А.
Рубрика: Механика
Статья в выпуске: 3 т.9, 2017 года.
Бесплатный доступ
Рассматривается механическая система, состоящая из двухколесной тележки, на оси которой располагается обратный маятник. Задача заключается в формировании такого управляющего воздействия, формируемого по принципу обратной связи, которое, с одной стороны, обеспечивало бы заданный закон движения механического средства, а с другой, стабилизировало бы неустойчивое положение маятника.
Механическая система, двухколесное транспортное средство, обратный маятник, люфт, стабилизация, управление
Короткий адрес: https://sciup.org/147158947
IDR: 147158947 | УДК: 517.9 | DOI: 10.14529/mmph170306
Stabilization of inverted pendulum on a two-wheeled vehicle
A mechanical system consisting of a two-wheeled vehicle with a fixed inverted pendulum is considered. The objective lies in forming such control action which, on the one hand, would provide movement of the system on the specified trajectory, and on the other hand would provide stabilization of the inverted pendulum in a neighborhood of unstable equilibrium position. Characteristic feature of the set objective is the fact that the control action is performed with the use of a hysteretic connection formalized by equations of the Bouc-Wen model. Equations of the researched system’s model are divided into two independent subsystems of the second and the fourth order, which describe rotational and longitudinal modes of motion correspondingly. Control action on each of the subsystems, formed on the basis of the feedback principle, is constructed according to the relay law; at that in the phase space of each subsystem linear manifolds which determine switching surfaces are constructed. Theorems that ascertain the presence of errors in the assumptions made, which determine the discrepancy between the desired and simulated laws of the vehicle motion, as well as the deviation of the pendulum from the unstable equilibrium position asymptotically tend to zero, are formulated and proved in the article. In proving the theorems, the apparatus of Lyapunov functions was used. As it is shown in the article, the presence of the hysteresis component in the feedback loop makes manageability of the system more difficult, and as a result, in this case we can only talk about limitation of errors of the discrepancy and the dissipative motion of the pendulum. Results of computational simulation of dynamics of the system under study both under conditions of hysteresis connections and without them, which illustrate the proved theorems, are given in the article.
Текст научной статьи Стабилизация обратного маятника на двухколесном транспортном средстве
Возможность управления неустойчивыми техническими системами теоретически рассматривалась уже давно, однако практическая значимость такого управления отчетливо проявилась лишь в последнее время [1–5]. Оказалось, что неустойчивые объекты управления при подходящем управлении обладают рядом «полезных» качеств. Примерами таких объектов могут служить космический корабль на этапе взлета, термоядерный реактор и многие другие. В тоже время при выходе из строя автоматической системы управления неустойчивый объект может представлять собой существенную угрозу, опасность и для человека, и для окружающей среды. В качестве катастрофического примера результатов отключения автоматического управления можно привести аварию на Чернобыльской АЭС. По мере того, как системы управления становятся все более надежными, все более широкий круг технических неустойчивых в отсутствие управления объектов применяется на практике. Одним из самых простых примеров неустойчивых объектов является классический обратный маятник. С одной стороны, задача о его стабилизации сравнительно простая и наглядная, с другой, она может найти практическое применение при создании моделей двуногих существ, а также антропоморфных устройств (роботов, киберов и др.), перемещающихся на двух опорах. В последние годы появились работы, посвященные проблемам стабилизации обратного маятника, связанного с движущимся двухколесным транспортным средством [6–8]. Эти исследования имеют потенциальные перспективы применения во многих областях, таких как транспорт и разведка, в связи с компактной конструкцией, удобством эксплуатации, высокой маневренностью и низким расходом топлива таких устройств. Тем не менее, рассматриваемая задача еще далека от окончательного решения. Известно, что многие традиционные технические устройства имеют как устойчивые, так и не устойчивые состояния и режимы работы. Характерный пример – сегвей, изобретённый Дином Кейменом электрический самобалансирующийся самокат с двумя колёсами, расположенными по обе стороны от водителя. Два колеса скутера расположены соосно. Сегвей автоматически балансируется при изменении положения корпуса водителя; для этой цели используется система индикаторной стабилизации: сигналы с гироскопических и жидкостных датчиков наклона поступают на микропроцессоры, которые вырабатывают электрические сигналы, воздействующие на двигатели и управляющие их движениями. Каждое колесо сегвея приводится во вращение своим электродвигателем, реагирующим на изменения равновесия машины. При наклоне тела ездока вперёд сегвей начинает катиться вперёд, при увеличении же угла наклона тела ездока скорость сегвея увеличивается. При отклонении корпуса назад само- кат замедляет движение, останавливается или катится задним ходом. Руление в первой модели происходит с помощью поворотной рукоятки, в новых моделях - качанием колонки влево-вправо. Задачи управления колебательными механическими системами имеют значительный теоретический интерес и большое практическое значение.
Известно, что в процессе функционирования механических систем вследствие старения и износа деталей неизбежно возникают люфты, упоры, поэтому для описания динамики таких систем необходимо принимать во внимание влияние гистерезисных эффектов. Математические модели таких нелинейностей в соответствии с классическими представлениями сводятся к операторам, которые рассматриваются как преобразователи на соответствующих функциональных пространствах. Динамика таких преобразователей описывается отношениями «вход-состояние» и «состояние-выход» [1].
В настоящей работе рассматривается механическая система, состоящая из двухколесной тележки, на оси которой располагается обратный маятник. Задача заключается в формировании такого управляющего воздействия, которое, с одной стороны, обеспечивало бы заданный закон движения механического средства, а с другой, стабилизировало бы неустойчивое положение маятника. При этом учитываются гистерезисные свойства в управляющем контуре изучаемой системы. Ниже графически представлены элементы, изучаемой механической системы - двухколесного транспортного средства с закрепленным на нем обратным маятником.
Рис. 1. Основные структурные элементы рассматриваемого механического устройства
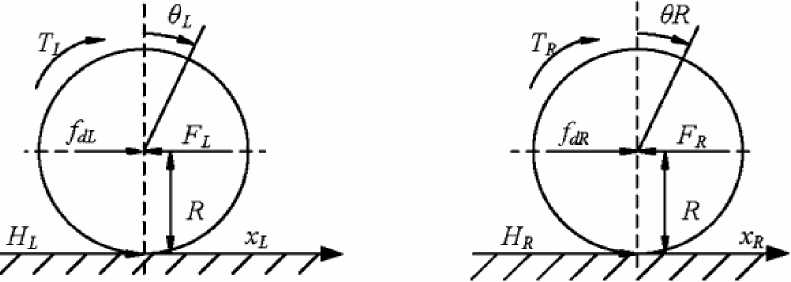
Рис. 2. Левое и правое колеса механического устройства с управляюшим моментом
Параметры и переменные, которые описывают рассматриваемую систему: ф - угол поворота транспортного средства; D - расстояние между двумя колесами вдоль центра оси; R - радиус колес; Jф - момент инерции; Тю - разность крутящих моментов левого и правого колес; v -продольная скорость транспортного средства; 6 - угол отклонения маятника от вертикального положения; m - масса перевернутого маятника; l - расстояние между центром тяжести тела и осью колеса; Tυ – сумма крутящих моментов левого и правого колес; x – перемещение транспортного средства по направлению продольной скорости; M – масса шасси; Mω – масса колес; h – раствор люфта.
Динамику системы описывают следующие уравнения:
..
D
ϕ=
2 RJ ϕ
т
ω ,
ν = [ J ml θ 2 sin θ - m 2 l 2 g sin θ cos θ ] + θ T ,
Ω ΩR
θ.. = 1 [M mglsinθ- m2l2θ2sinθcosθ] - mlcosθT , Ω x ΩR ν где T = T -T ; T =T +T ; M =M +m+ 2(M + Jω) ; J = ml2 + J ; Ω = M J - m2l2 cos2θ; ω L R ν L R x ω R2 θ c x θ
J ϕ = J ν + D ( M ω + J ω ) .
2 R 2
Будем считать заданным желаемый закон изменения параметров системы: ϕ d = ϕ d ( t ), θ d = θ d ( t ),X d = Xd ( t ).
Модель, описывающую динамику изменения параметров системы, можно представить в виде двух независимых подсистем. Первая подсистема состоит из одного уравнения – ϕ -подсистемы, определяющего угловые движения транспортного средства:
..
D
ϕ=
2 RJ ϕ
т
ω .
Уравнение (5) можно переписать в виде системы из двух уравнений:
e ɺ 1 = e 2
D .. , e 2 = T ω - ϕ d
2 RJ ϕ
где e 1 = ϕ - ϕ d , e 2 = ϕ - ϕ d .
Вторая подсистема, описывающая радиальные движения транспортного средства, а также колебания установленного на ней маятника, состоит из двух уравнений – { v , θ } -подсистемы:
υ . = 1 [ J ml θ 2sin θ - m 2 l 2 g sin θ cos θ ] + J θ T Ω Ω R
= [ M mgl sin θ - m 2 l 2 θ 2 sin θ cos θ ] - m cos T
θ Ω x ΩR υ
.
Систему (7) удобно представить в виде системы уравнений первого порядка:
eɺ3 = e4, eɺ4 = 1 [Jθml(θ.d+e6)2sin(e5+θd)-m2l2gsin(e5+θd)cos(e5+θd)]+ Jθ Tυ
Ω0 Ω0R eɺ5 = e6,
-
..
xd ,
e ɺ 6 = 1 [ Mxmgl sin( e 5 + θ d ) - m 2 l 2( θ . d + e 6)2sin( e 5 + θ d )cos( e 5 + θ d )] - ml cos( e 5 + θ d ) T υ - θ . d . , Ω 0 Ω 0 R
..
..
где Ω 0 = MxJ θ - m 2 l 2cos2( θ d + e 5), e 3 = x - xd , e 4 = v - vd , e 5 = θ - θ d , e 6 = θ - θ d .
Рассмотрим подсистему (6), управлять которой будем по принципу обратной связи. Для этого введем новую переменную и определим поверхность переключения в фазовом пространстве системы как s i = 0.
Si = ei + q ei,(9)
где c1 – положительный параметр . Непосредственно из определения вытекает :
. .. . D ...
-
Si = ei+ Ci ei = ——Tw - » + ci ei.(10)
2 RJ »
Для стабилизации вращательного движения определим управляющий момент следующим образом:
-
2 RJ» -
Tw = —»d - Ci ei - ki sgn(Si) - k2Si ], где k1 , k2 – положительно заданные параметры.
Аналогично будем строить управление второй подсистемой (8), управлять которой, будем также по принципу обратной связи. Для этого введем новую переменную и определим поверхность переключения в фазовом пространстве системы, как s 2 = 0 .
S 2 = е з + C 2 е з , (i2)
где c 2 – положительный параметр, тогда
. .. . 1 .
S 2 = e 3 + c 2 е 3 = —[ J 6 ml ( 6 d + е 6 ) sin( е 5 + 6 d ) - ml g sin( e 5 + 6 d )cos( e 5 + 6 d )] +
О 0
J ..
+ см/" - v d + C 2 e 3 ^ 0 R
Для стабилизации радиального движения определим управляющий момент:
. 9 m 2 1 2 g О R . .
T v =- Rml 6 + e 6 )2 sin( e 5 + 0 d )+—— sin( e 5 + 0 d ) cos( e 5 + 0 d )--^- [ c 2 e 3 - V d + k 3 sgn( s 2 ) + k 4 s 2 ],(14)
J 6
где k 3 , k 4 – положительно заданные параметры.
Для того, чтобы одновременно управлять обеими подсистемами системы, введем дополнительное управляющее воздействие:
. J ... .
vd = gtan 6--T6^ [6d + c3(6 - 6d ) - k5 sgn(S 3) - k6 S3], ml cos 6
где g – ускорение свободного падения; c3 , k5 , k6 – положительные параметры; s3 – поверхность переключения, определяемая соотношением:
S 3 = e 6 + c 3 e 5 .
Сформулируем основные результаты работы, заключающиеся в принципиальной возможности стабилизации обеих подсистем, в сделанных предположениях относительно управляющих воздействий, в окрестности нулевого положения равновесия.
Теорема 1 . Система (6) с управляющим воздействием (ii) абсолютно асимптотически устойчива:
lim ||e i | Н 0, t ^^
lim |i e 2 | н 0.
t ^^
Доказательство: определим функцию Ляпунова как
V = ^ a s 2 , 1 2 1
где а = D] 2 RJ » .
Очевидно, что функция V > 0, тогда
V 1 = α s 1 s 1 = s 1[ Tw - α ( ϕ d - c 1 e 1)] .
Подставив (14) в V , получим
.
V = - ( k 1sgn( s 1) + k 2( s 1)) s 1 .
Очевидно, что V 1 ≤℘ V 1 , где ℘ – положительный параметр, что в силу теоремы Ляпунова означает асимптотическую устойчивость.
Теорема 2 . Рассмотрим подсистему (8) с управляющим воздействием (14). В сделанных предположениях эта система абсолютно асимптотически устойчива, т. е. при любых начальных условиях выполняются соотношения:
lim ||e3 || → 0, t →∞
lim || e 4 || → 0. t →∞
Доказательство : определим функцию Ляпунова для системы (8) посредством соотношения
V2 = 2 β3s2 , где β3 = Ω0R Jθ .
Очевидно, что функция V 2 ≥ 0, и
.. .
V 2 = β 3 s 2 s 2 = s 2[ β 1( θ d + e 6)2sin( e 5 + θ d ) - β 2sin( e 5 + θ d ) cos( e 5 + θ d ) + Tv , (22)
где β 1 = Rml , B 2 = m gl .
Jθ
Подставив (14) в (20), получим
.
V 2 = - ( k 3sgn( s 2) + k 4( s 2)) s 2. (23)
Очевидно, что V 2 ≤℘ V 1 , где ℘ – положительный параметр, что в силу теоремы Ляпунова означает асимптотическую устойчивость.
Люфты и упоры возникают благодаря старению и износу механических параметров, поэтому представляет интерес изучение динамики рассматриваемой системы в ситуации, когда управляющее воздействие ( T v и T w ) воздействует на систему опосредованно, т. е. они являются входом на гистерезисный преобразователь – люфт, а его выход является управляющим воздействием на систему. Величина люфта определяет степень поворота элемента управления, которая не приводит к изменениям в управляемой системе. Наличие люфта в управляющем воздействии в общем случае осложняет задачу управления [9–13], так как возникают зоны нечувствительности по отношению к управляющему воздействию. Приведем краткое описание используемого в дальнейшем гистерезисного преобразователя – люфта, основанное на операторной трактовке.
Выход преобразователя – люфта на монотонных входах описывается соотношением: x ( t о ) при тех t, при которых x ( t q ) - h < u ( t ) < x ( t q ),
x ( t ) = < u ( t ) при тех t, при которых u ( t ) > x ( t q ),
u (t) + h при тех t, при которых u (t) < x(tq) - h, которое иллюстрирует рис. 3.
С помощью полугруппового тождества действие оператора распространяется на все кусочно- монотонные входы:
Г[u(t1, h]x(t) = Г[Г[u0,h]x(t1),h]x(t) (25) и с помощью специальной предельной конструкции на все непрерывные. Так как выход этого оператора не является дифференцируемым, то в дальнейшем используется аппроксимация люфта моделью Боука–Вена [7]. Эта известная полуфизическая модель широко используется для феноменологического описания гистерезисных эффектов. Популярность модели Боука–Вена обу- славливается ее способностью охватывать в аналитическом виде различные формы гистерезисных циклов. Формальное описание модели сводится к системе следующих уравнений:
F bw ( x , t ) = a kx ( t ) + (1 - a ) Dkz ( t ), z = D - 1( Ax - P\ x || z I n - 1 z - y x I z I n ). (26) F bw ( x , t ) трактуется как выход гистерезисного преобразователя, а x ( t ) - как вход. Здесь n > 1, D > 0 к > 0 и 0 < a < 1.
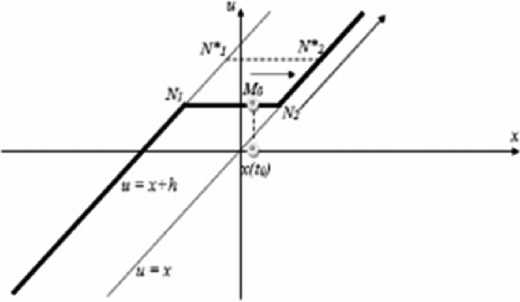
Рис. 3. Динамика входно-выходных соответствий люфта
Рассмотрим обобщение систем (6) и (8), в которых управляющее воздействие поступает на вход гистерезисного преобразователя, а выход является управляющим воздействием на систему:
e 1 = e 2
^ = J F” - Ф d
F bw ( x , t ) = a kx ( t ) + (1 - a ) Dkz ( t ), _ z = D - 1( Ax - 0\x \| z \n - 1 z - y x \ z |n ).
e3 = e4, e4 = -1- J ml(0d + в6)2 sinв5 + 0d ) - m2l2g sinв5 + 0d ) cos(в5 + 0d )] + 0 Fbw
U 0 ^^o R
^^^^^^^е
..
xd ,
e5 = e 6 ,
® 6 = 14 M x mgl sin( e 5 + 0 d ) - m 2 1 2 ( 0 d + e 6 )2 sin( e 5 + 0 d ) cos( e 5 + 0 d )] -U o
Fbw ( x , t ) = a kx ( t ) + (1 - a ) Dkz ( t ),
ml cos( e 5 + 0 d )
Q 0 R
.. (28) F bw - 0 d ,
-
_ z = D - 1( Ax - e \ x \| z \n - 1 z - Y x I z \n ).
Как и ранее в рассматриваемой системе, основным являлся вопрос о стабилизации, т. е. асимптотическом поведении ее фазовых переменных. Ниже приводятся графики при одних и тех же физических параметрах системы с люфтом и без люфта. Эта система исследовалась посредством численных экспериментов. Данная задача была решена в среде программирования Wolfram Mathematica.
Значения констант и начальные условия приведены ниже:
m = 3; M = 5; M to = 1; D = 1,5; R = 0,25; 1 = 0,2; J to = 1,5; J c = 5;
J ^ = 1,5; ^ (0) = 0; x(0) = 0; 0 (0) = 0,2; u (0) = [ ^ (0) x (0) 0 (0)] r = [0,0,0,002] r ;
k 1 = k 3 = 0,5; k 2 = k 4 = 0,2; k 5 = 3; k 6 = 5; c 1 = c 2 = c 3 = 0,5.
На рис. 8–11 приведены результаты численного моделирования исследуемой системы.
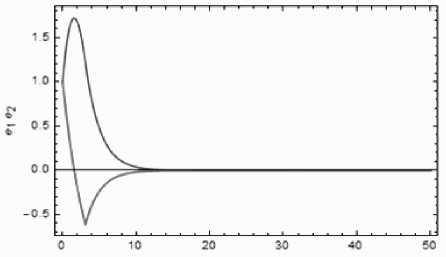
Рис. 4. Зависимость e 1 , e 2 от времени t = 50
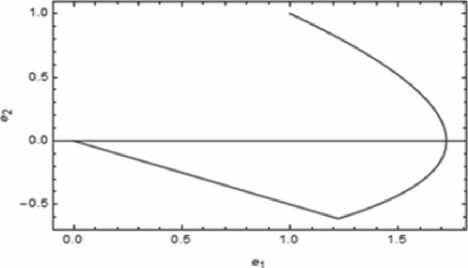
Рис. 5. Зависимость e 1 от e 2 , при t = 50
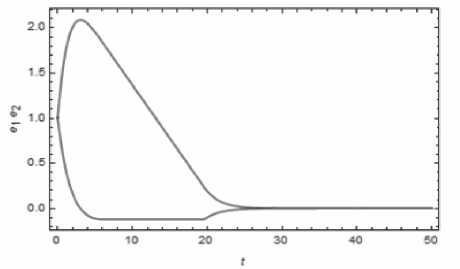
Рис. 6. Зависимость e 1 , e 2 от времени t с наличием люфта в обратной связи, при α = 0,5
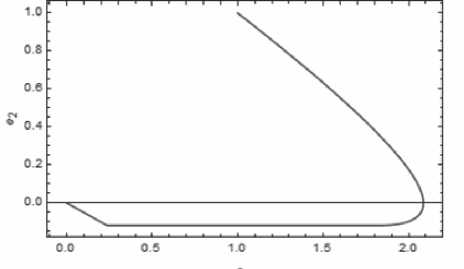
Рис. 7. Зависимость e 1 от e 2 с наличием люфта в обратной связи, при α = 0,5, t = 50
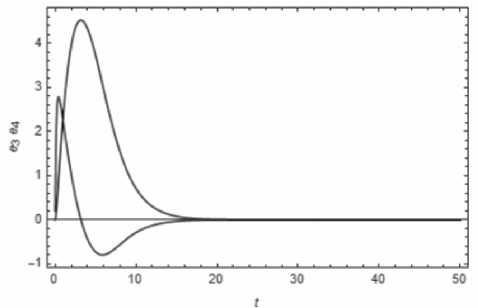
Рис. 8. Зависимость e 3 , e 4 от времени t
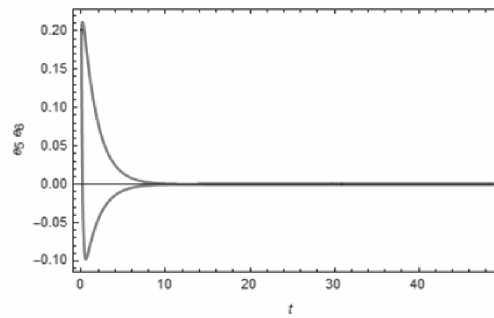
Рис. 9. Зависимость e 5 , e 6 от времени t
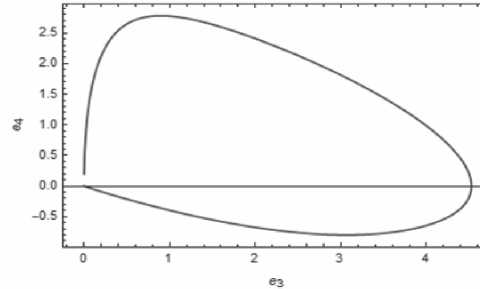
Рис. 10. Зависимость e 3 , e 4 , при t = 50
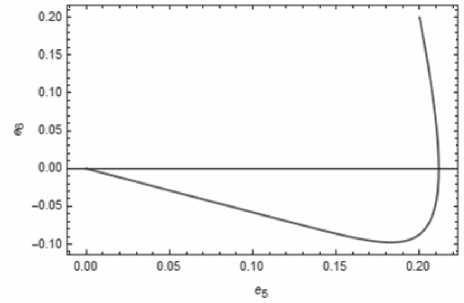
Рис. 11. Зависимость e 5 от e 6 при t = 50
Численные результаты показывают, что релейное управление, формируемое по принципу обратной связи, позволяет удерживать фазовые координаты в окрестности положения равновесия, при этом асимптотическая устойчивость не имеет места, что обусловлено наличием люфтов в контурах обратной связи исследуемых систем.
Исследована стабилизации перевернутого маятника на двухколесной тележке в процессе ее движения по заданной траектории. Предложен алгоритм управления, обеспечивающий устойчивость системы и диссипативность при наличии гистерезисных звеньев в контуре обратной связи.
Работа выполнена при поддержке РФФИ грант № 16-08-003.
-
1. Красносельский, M.А. Системы с гистерезисом // M.А. Красносельский, А.В. Покровский. – М.: Наука, 1983. – 272 с.
-
2. Стабилизация перевернутого маятника вертикальными осцилляциями с помощью гистерезисного управления / М.Е. Семенов, Д.В. Шевлякова, О.И. Канищева, Д.В. Грачиков // Наукоемкие технологии. – 2012. – Т. 13, № 3. – С. 027–034.
-
3. Семенов, М.Е. Адаптивное управление неустойчивым объектом с гистерезисными свойствами / М.Е. Семенов, А.Г. Рукавицын, О.И. Канищева, А.Е. Пигарев // Вестник ВГУ. Серия: Системный анализ и информационные технологии. – 2014. – № 1. – C. 40–44.
-
4. Капица, П.Л. Маятник с вибрирующим подвесом / П.Л. Капица // УФН. – 1951. – Т. 44, № 3. – С. 7–20.
-
5. Мирошник, И.В. Теория автоматического управления. Нелинейные и оптимальные системы // И.В. Мирошник. – СПб.: Питер, 2006. – 272 с.
-
6. Черноусько, Ф.Л. Управление колебаниями / Ф.Л. Черноусько, Л.Д. Акуленко, Б.Н. Соколов. – М.: Наука, 1980. – 383 с.
-
7. Öztürk, İ. A novel method for producing pseudo random numbers from differential equationbased chaotic systems / i. Ozturk, R. Kilic // Nonlinear Dynamics, 2015, Vol. 80, Issue 3, pp. 11471157.
-
8. Решмин, С.А. Оптимальное по быстродействию управление перевернутым маятником в форме синтеза / С.А. Решмин, Ф.Л. Черноусько // Известия РАН. Теория и системы управления. – 2006. – № 3. – С. 51–62.
-
9. Robust stabilization of fractional-order chaotic systems with linear controllers: LMI-based sufficient conditions / M.R. Faieghi, S. Kuntanapreeda, H. Delavari, D. Baleanu // Journal of Vibration and Control. – 2014. – Vol. 20. – Issue 7. – pp. 1042–1051.
-
10. Semenov, M.E. Inverted pendulum under hysteretic control: stability zones and periodic solutions / M.E. Semenov, D.V. Shevlyakova, P.A. Meleshenko // Nonlinear Dynamics. – 2014. – Vol. 75. – Issue 1-2. – P. 247–256.
-
11. On the state feedback control of inverted pendulum with hysteretic nonlinearity / M.E. Semenov, D.V. Grachikov, A.G. Rukavitsyn, P.A. Meleshenko // MATEC Web of Conferences. – 2014. – Vol. 16. – P. 05009.
-
12. Stephenson, A. On an induced stability / A. Stephenson // Philosophical Magazine. – 1908. – Vol. 15. – Issue 86. – P. 233–236.
-
13. Неймарк, Ю.И. Динамические модели теории управления / Ю.И. Неймарк, Н.Я. Коган, В.П. Савельев. – М.: Наука, 1985. – 400 с.
Список литературы Стабилизация обратного маятника на двухколесном транспортном средстве
- Красносельский, M.А. Системы с гистерезисом//M.А. Красносельский, А.В. Покровский. -М.: Наука, 1983. -272 с.
- Стабилизация перевернутого маятника вертикальными осцилляциями с помощью гистерезисного управления/М.Е. Семенов, Д.В. Шевлякова, О.И. Канищева, Д.В. Грачиков//Наукоемкие технологии. -2012. -Т. 13, № 3. -С. 027-034.
- Семенов, М.Е. Адаптивное управление неустойчивым объектом с гистерезисными свойствами/М.Е. Семенов, А.Г. Рукавицын, О.И. Канищева, А.Е. Пигарев//Вестник ВГУ. Серия: Системный анализ и информационные технологии. -2014. -№ 1. -C. 40-44.
- Капица, П.Л. Маятник с вибрирующим подвесом/П.Л. Капица//УФН. -1951. -Т. 44, № 3. -С. 7-20.
- Мирошник, И.В. Теория автоматического управления. Нелинейные и оптимальные системы//И.В. Мирошник. -СПб.: Питер, 2006 -272 с.
- Черноусько, Ф.Л. Управление колебаниями/Ф.Л. Черноусько, Л.Д. Акуленко, Б.Н. Соколов. -М.: Наука, 1980. -383 с.
- Öztürk, İ. A novel method for producing pseudo random numbers from differential equation-based chaotic systems/İ. Öztürk, R. Kılıç//Nonlinear Dynamics, 2015, Vol. 80, Issue 3, pp. 1147-1157.
- Решмин, С.А. Оптимальное по быстродействию управление перевернутым маятником в форме синтеза/С.А. Решмин, Ф.Л. Черноусько//Известия РАН. Теория и системы управления. -2006. -№ 3. -С. 51-62.
- Robust stabilization of fractional-order chaotic systems with linear controllers: LMI-based sufficient conditions/M.R. Faieghi, S. Kuntanapreeda, H. Delavari, D. Baleanu//Journal of Vibration and Control. -2014. -Vol. 20. -Issue 7. -pp. 1042-1051.
- Semenov, M.E. Inverted pendulum under hysteretic control: stability zones and periodic solutions/M.E. Semenov, D.V. Shevlyakova, P.A. Meleshenko//Nonlinear Dynamics. -2014. -Vol. 75. -Issue 1-2. -P. 247-256.
- On the state feedback control of inverted pendulum with hysteretic nonlinearity/M.E. Semenov, D.V. Grachikov, A.G. Rukavitsyn, P.A. Meleshenko//MATEC Web of Conferences. -2014. -Vol. 16. -P. 05009.
- Stephenson, A. On an induced stability/A. Stephenson//Philosophical Magazine. -1908. -Vol. 15. -Issue 86. -P. 233-236.
- Неймарк, Ю.И. Динамические модели теории управления/Ю.И. Неймарк, Н.Я. Коган, В.П. Савельев. -М.: Наука, 1985. -400 с.
