Стенд для испытания бесступенчатого дифференциального механизма поворота со следящей системой управления движением гусеничного промышленного трактора

Автор: Землянский Юрий Матвеевич, Кондаков Сергей Владимирович, Дьяконов Александр Анатольевич, Подживотова Ирина Александровна
Рубрика: Расчет и конструирование
Статья в выпуске: 4 т.19, 2019 года.
Бесплатный доступ
Управление криволинейным движением гусеничных машин осуществляется за счет рассогласования скоростей гусениц. Появление на рынке гидрообъемных передач достаточной установочной мощности по доступной цене позволило организовать бесступенчатое регулирование радиуса поворота как в транспортном режиме, так и при выполнении технологических операций бульдозирования и рыхления. Внешние помехи искажают траекторию, заданную джойстиком. Для корректировки траектории используют системы навигации, которые тоже стали доступны производителям и потребителям промышленных тракторов. Для отработки алгоритмов управления гусеничной машиной необходимо стендовое испытательное оборудование. Статья посвящена испытаниям гусеничных промышленных тракторов с современными системами навигации, в частности стендовым исследовательским испытаниям бесступенчатого дифференциального механизма поворота машин со следящей системой управления движением. Стенд, содержащий неподвижно установленный на основании остов машины с приводом и размещенный на нем испытуемый бесступенчатый дифференциальный механизм поворота (БДМП) со следящей системой управления (ССУ) движением, также снабжен направляющими устройствами для обеспечения заданного пространственного перемещения отдельно взятого гирокомпаса с акселерометром, входящего в состав ССУ движением. Технический результат - расширение функциональных возможностей стенда, позволяющих определить работоспособность и выполнить настройку ССУ движением, а также обеспечить контроль основных параметров БДМП путем имитации в стационарных стендовых условиях входных воздействий на элементы ССУ, в максимальной степени соответствующих реальным условиям движения машины в пространстве, при одновременном снижении трудоемкости и стоимости этих работ, за счет исключения необходимости использования транспортных средств.
Бесступенчатый дифференциальный механизм поворота, промышленный трактор, следящая система управления, стенд для испытаний, стационарные условия, имитация движения
Короткий адрес: https://sciup.org/147231755
IDR: 147231755 | УДК: 629.3.021 | DOI: 10.14529/engin190402
Stepless differential rotation mechanism test bench with tracking motion control system of tracked industrial tractor
The curvilinear movement of tracked vehicles is controlled by the mismatch of track speeds. Appearance of sufficient installation power at an affordable price on the market of hydrostatic transmissions made it possible to organize stepless control of the turning radius both in the transport mode and when performing technological operations of bulldozing and loosening. External interference distorts the path defined by the joystick. To correct the trajectory, navigation systems are used, which also became available to manufacturers and consumers of industrial tractors. To test control algorithms for a tracked vehicle, bench test equipment is required. The article is devoted to the testing of tracked industrial tractors with modern navigation systems, in particular bench research tests of a stepless differential mechanism for turning machines with a tracking motion control system. The stand, which contains the test drive stepless differential rotation mechanism (BDM) with a motion tracking control system (CCM) motionlessly mounted on the base of a car frame with a drive, and is also equipped with guiding devices to provide a given spatial movement of a single gyrocompass with an accelerometer, entering -which is part of the SSU movement. The technical result is the expansion of the functionality of the stand, which allows to determine the operability and configure the control system by the motion, as well as to control the main parameters of the BDM by simulating in stationary bench conditions the input effects on the elements of the control system, which to the maximum extent correspond to the actual conditions of movement of the machine in the space , while reducing the complexity and cost of these works, by eliminating the need to use vehicles.
Текст научной статьи Стенд для испытания бесступенчатого дифференциального механизма поворота со следящей системой управления движением гусеничного промышленного трактора
Тенденции дальнейшего совершенствования дорожно-строительной техники предполагают повышение ее технического уровня, качества и надежности, а также сокращение сроков проектирования, испытаний и внедрения в производство.
Современные промышленные тракторы ведущих мировых производителей тяжелых промышленных тракторов (Катерпиллар, Комацу, Либхер, ДСТ-Урал, ЧЕТРА) оснащаются бесступенчатыми трансмиссиями: электрическими, гидродинамическими и гидрообъемными [1-5], что позволяет им выполнять технологические операции, например, бульзозирование, рыхление, при лучшей загрузке двигателя по мощности и по моменту; снижать утомляемость водителя, повышать качество работы. Кроме того, трансмиссии, в состав которых входят бортовая гидростатическая передача или двухпоточный дифференциальный механизм поворота, создают устойчивые предпосылки к автоматизации процесса управления трактором за счет внедрения элементов навигационных систем. Испытания и конструкторско-экспериментальная доводка таких систем на тракторах являются наиболее сложным, трудоемким, дорогостоящим и длительным этапом их создания.
Темой данной статьи является разработка предложений по созданию испытательного стенда для исследования свойств бесступенчатого дифференциального механизма поворота со следящей системой управления (ССУ) движением промышленного трактора.
Для отработки алгоритмов автоматического управления кроме математического и программного обеспечения требуется экспериментальная проверка работоспособности ССУ, это требует проведения комплекса испытаний, в том числе стендовых и полевых.
Стендовые испытания являются важнейшим этапом процесса проверки качества и доводки узлов транспортных средств. Для того чтобы их результаты были достоверными, при испытаниях должна обеспечиваться высокая точность имитации эксплуатационных режимов. Для определения работоспособности механизма поворота и настройки основных параметров следящей системы управления движением все устройство в целом должно отрабатываться на функционирование. Так, при испытании механизма поворота промышленного трактора со следящей системой управления движением необходимо иметь стенд, в котором элементы механизма поворота будут реагировать на сигналы датчиков положения транспортного средства в пространстве и отклонения органов управления.
Первоначально испытания выполнялись на стендах, которые обеспечивали возможность воспроизведения только постоянного режима работы механической части трансмиссии без элементов следящей системы управления движением [6–11].
Известны стенды для испытаний трансмиссий мобильных машин, часть которых, интересующая заявителя, содержит в общем случае стационарно закрепленную на основании раму с установленным на ней приводом, соединенным с испытуемой трансмиссией [12–14].
Недостатком известных стационарных стендов является низкая точность имитации эксплуатационных режимов из-за невозможности воспроизведения пространственного движении мобильных машин и, как следствие, практически ограниченные возможности регулировки и настройки параметров БДМП с ССУ движением.
Очевидно, что стенды данного типа не позволяют проводить настройки и проверки БДМП с ССУ мобильных машин по сигналам, получаемыми в результате движения по заданной траектории.
В этом случае встает задача об устройстве, имитирующем движение мобильной машины с БДМП с ССУ, решение которой может пойти по двум вариантам технического поиска: первый вариант – имитация движения для отдельных приборов из состава ССУ, не установленных на БДМП; и второй вариант – для приборов, установленных на самой мобильной машине с БДМП с ССУ. Второй вариант решения, по сути, является устройством, представляющим мобильный стенд со всеми вытекающими недостатками ходовых испытаний – высокой трудоемкостью и стоимостью таких работ.
В данной статье описано техническое решение стационарного стенда для исследовательских испытаний БДМП с ССУ с устройством имитации движения для отдельных приборов из состава ССУ, не установленных на БДМП.
Вопросы математического моделирования работы гидростатических передач в трансмиссиях транспортных машин освещены в работах [15–19]. Моделирование движения промышленного трактора с БДМП опубликовано в работе авторов [20]. Разработанные алгоритмы управления трактором с БДМП требуют экспериментальной проверки и могут быть реализованы на стенде, который позволяет определить работоспособность и выполнить настройку ССУ, обеспечить контроль основных параметров БДМП путем имитации в стационарных стендовых условиях входных воздействий на элементы ССУ, в максимальной степени соответствующих реальным условиям движения машины в пространстве, при одновременном снижении трудоемкости и стоимости этих работ, за счет исключения необходимости использования подвижных транспортных средств.
Стенд, содержащий неподвижно установленный на основании остов машины с приводом, размещенный на остове и кинематически связанный с приводом испытуемый БДМП с ССУ, включающей ручку управления поворотом (командоконтроллер), гирокомпас с акселерометром, датчики скорости вращения ведущих колес, микропроцессорный блок управления (МБУ) и электрогидрораспределитель, дополнительно снабжен направляющей, с возможностью перемещения по ней каретки с гирокомпасом и акселерометром из состава ССУ, имеющего коммутацию с МБУ. Направляющая выполняется в виде гибкого монорельса, расположение и конфигурация которого в пространстве позволяют имитировать любую заранее заданную траекторию движения центра масс мобильной машины с БДМП с ССУ движением.
Стенд для испытания бесступенчатого дифференциального механизма поворота со следящей системой управления движением мобильных машин (см. рисунок) содержит неподвижно установленный на основании остов машины 1 с приводом 2, размещенный на остове и кинематически связанный с приводом испытуемый бесступенчатый дифференциальный механизм поворота 3 со следящей системой управления (ССУ) движением, включающей ручку управления поворотом (командоконтроллер) 4, гирокомпас 5 с акселерометром, датчики скорости 6 вращения ведущих колес, микропроцессорный блок управления (МБУ) 7 и электрогидрораспределитель 8, а также установленную на штативах 9 направляющую 10 с подвижной кареткой 11 для размещения на ней гирокомпаса 5 с акселерометром из состава ССУ, имеющего коммутацию с МБУ 7. Направляющая 10 выполнена в виде гибкого монорельса, требуемое расположение и конфигурация которого в пространстве обеспечивается настройкой штативов 9. Подвижная каретка 11 снабжена автономным приводом и управлением (не обозначено), обеспечивающим ее движение по направляющей 10. Параметры движения каретки 11 по направляющей 10 согласованы с параметрами движения привода 2.
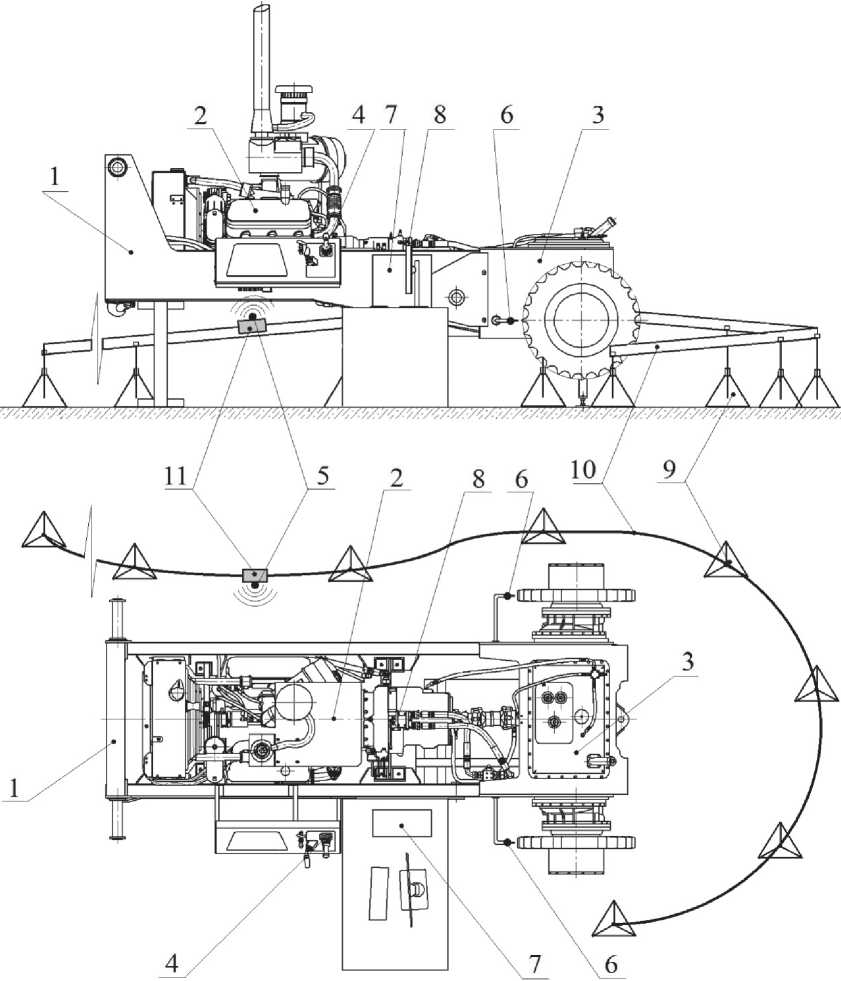
Стенд для испытания бесступенчатого дифференциального механизма поворота с ССУ
ССУ направлена на поддержание постоянной траектории движения мобильной машины, заданной ручкой управления поворотом 4. ССУ представляет собой систему управления с обратной связью, которая осуществляет прием и обработку входных сигналов, и выработку выходного сигнала управления в соответствии с заданной передаточной функцией. Входными сигналами ССУ являются: сигнал управления – от ручки управления поворотом 4 (сигналы оператора, задающие траекторию движения Машины, и включения / отключения режима «прямого управления»), и сигналы обратной связи – от гирокомпаса 5 с акселерометром (сигналы, характеризующие текущую траекторию движения Машины) и от датчиков скорости 6 вращения ведущих колес Машины.
Выходным сигналом ССУ является сигнал управления для электрогидравлического распределителя 8, генерируемый МБУ 7. При этом МБУ 7 является центральным элементов всей ССУ.
Обработка сигналов, принимаемых от периферийных устройств (ручка управления поворотом 4, гирокомпас 5, датчики скорости 6 вращения ведущих колес) ССУ, осуществляется МБУ 7 в цифровом виде.
Функция, выполняемая ручкой управления поворотом 4, в ССУ – это основное устройство ввода информации оператором Машины, осуществляющее формирование электрического сигнала, задающего траекторию движения Машины.
Гирокомпас 5 со встроенным акселерометром позволяет получать данные о текущей траектории движения Машины и служит элементом обратной связи для ССУ.
Для каждого из ведущих колес предназначен отдельный датчик 6, определяющий скорость его вращения. Датчики скорости вращения ведущих колес являются одним из элементов обратной связи ССУ и служат для измерения скорости вращения ведущих колес Машины и передачи измеренного значения по цифровому интерфейсу связи в МБУ для последующей обработки в соответствии с заданной передаточной функцией.
МБУ 7 осуществляет прием и обработку входных сигналов ССУ и выработку выходного управляющего сигнала на электрогидрораспределитель 8 в соответствии с заданной передаточной.
Управление работой электрогидрораспределителя 8 осуществляет МБУ посредством изменения мощности, подводимой к блоку катушек электрогидрораспределителя, что приводит к перемещению гидравлического распределителя, установленного на Машине.
Стенд работает следующим образом:
-
1. Режим прямолинейного равномерного движения.
-
2. Режим установившегося поворота заданного радиуса.
-
3. Режим увода Машина от устойчивого прямолинейного движения.
-
4. Режим не управляемого заноса Машины.
Включить стенд и установить неизменные обороты привода 2. При этом ручка управления поворотом 4 должна находиться в нейтральном положении, а каретка 11 с гирокомпасом 5 занимать неподвижное положение на направляющей 10, что соответствует режиму прямолинейного равномерного движения Машины. БДМП с ССУ должен обеспечить равенство частот вращения ведущих колес, контролируемых датчиками скорости 6. В случае отсутствия равенства частот вращения ведущих колес, произвести настройку ССУ.
Задать направляющей 10 дугу изгиба в горизонтальной плоскости требуемого радиуса, путем соответствующего размещения штативов 9 на основании. Включить стенд и установить неизменные обороты привода 2. Отклонить ручку управления поворотом 4 на величину соответствующую заданному радиусу поворота Машины. Одновременно привести в движение каретку 11 с гирокомпасом 5 на участке дуги изгиба направляющей 10 заданного радиуса. БДМП с ССУ должен обеспечить разность частот вращения ведущих колес, контролируемых датчиками скорости 6, соответствующую движению Машины при повороте заданного радиуса. В случае не соответствия разности частот вращения ведущих колес заданному радиусу поворота произвести настройку ССУ.
Задать направляющей 10 дугу изгиба в горизонтальной плоскости требуемого радиуса, путем соответствующего размещения штативов 9 на основании. Включить стенд и установить неизменные обороты привода 2. При этом ручка управления поворотом 4 должна находиться в нейтральном положении, что соответствует режиму прямолинейного равномерного движения Машины. Привести в движение каретку 11 с гирокомпасом 5 на участке дуги изгиба направляющей 10 за- данного радиуса. Сигнал с гирокомпаса 5, поступающий в МБУ 7, позволяет выстроить фактическую траекторию движения Машины и после сравнения ее с заданной ручкой управления поворотом 4 сформировать коррекцию курса воздействием на сигнал управления электрогидрораспределителем 8. Таким образом, БДМП с ССУ должен обеспечить разность частот вращения ведущих колес, контролируемых датчиками скорости 6, соответствующую корректировке траектории движения Машины для обеспечения устойчивого прямолинейного движения. В случае не соответствия разности частот вращения ведущих колес, при корректировке заданного радиуса увода, произвести настройку ССУ.
Включить стенд и установить неизменные обороты привода 2. Отклонить ручку управления поворотом 4 на величину, соответствующую заданному радиусу поворота Машины. При этом каретка 11 с гирокомпасом 5 должна занимать неподвижное положение на направляющей 10, что соответствует режиму прямолинейного равномерного движения Машины. БДМП с ССУ должен обеспечить остановку вращения (торможение) ведущих колес. В случае отсутствия торможения ведущих колес, произвести настройку ССУ.
Таким образом, благодаря введению направляющей, с перемещением по ней гирокомпаса с акселерометром из состава ССУ, имеющего коммутацию с МБУ, получена возможность имитировать любую заранее заданную траекторию движения центра масс мобильной машины с БДМП с ССУ. Все это позволяет выполнить настройку ССУ движением, а также обеспечить контроль основных параметров БДМП путем имитации в стационарных стендовых условиях входных воздействий на элементы ССУ, в максимальной степени соответствующих реальным условиям движения машины в пространстве, при одновременном снижении трудоемкости и стоимости этих работ, за счет исключения необходимости использования подвижных транспортных средств.
По материалам исследования подана заявка на изобретение. Уведомление о приеме и регистрации заявки от 07.11.2019, регистрационный № 2019135922.
Работа выполнялась при финансовой поддержке Министерства науки и высшего образования Российской Федерации в рамках комплексного проекта по созданию высокотехнологичного производства «Разработка бесступенчатого дифференциального механизма поворота со следящей системой управления для внедорожных и дорожно-строительных машин нового поколения» по соглашению № 074-11-2018-006 от 31.05.2018 г. между Министерством науки и высшего образования Российской Федерации и Обществом с ограниченной ответственностью Производственная компания «Ходовые системы» в кооперации с Головным исполнителем НИОКТР – Федеральным государственным автономным образовательным учреждением высшего образования «Южно-Уральский государственный университет (национальный исследовательский университет)».
Список литературы Стенд для испытания бесступенчатого дифференциального механизма поворота со следящей системой управления движением гусеничного промышленного трактора
- Caterpillar продемонстрировал систему удаленного управления бульдозером Cat D11T. - news.ati.su/news/2015/11/16/ (дата обращения: 03.12.2019).
- Новый бульдозер D65PXi-18 от Komatsu, благодаря системе IMC, сэкономит до 10 часов в месяц на перенастройку машины. - http://allspectech.com/novosti/novyj-buldozer-d65pxi-18-ot-komatsu.html (дата обращения: 03.12.2019).
- ТОП-5 гусеничных бульдозеров немецкого производителя Liebherr (Либхер). - specmahina. ru/buldozer/liebherr- (дата обращения: 03.12.2019).
- Завод ДСТ-УРАЛ продемонстрировал новую модель бульдозера с системой дистанционного управления. - sdelanounas.ru/blogs/106773 (дата обращения: 03.12.2019).
- Характеристика бульдозера Т-1101, трактора Т-11.01, Т-11.02, ЧЕТРА Т-11. - http:// harakteristika-buldozerov.ru/harakteristika-buldozera-t-1101/ (дата обращения: 03.12.2019).
- ГОСТ 25836-83 Тракторы. Виды и программы испытаний. - М.: ИПК Изд-во стандартов, 2003. - 27 c.
- РД 50-424-83 Методические указания. Надежность в технике. Ускоренные испытания. Основные положения. - М: Изд-во стандартов, 1984. - 12 с.
- Левитанус, А.Д. Ускоренные испытания тракторов, их узлов и агрегатов / А.Д. Левитанус. - М.: Машиностроение, 1973. - 208 с.
- Гинзбург, Ю.В. Промышленные тракторы / Ю.В. Гинзбург, А.И. Швед, А.П. Парфенов. - М.: Машиностроение, 1986. - 296 с.
- Финченко, Н.И. Испытание автомобилей и тракторов: учеб.-метод. пособие / Н.И. Финченко, А.В. Давыдов, Д.В. Халтурин. - Томск: Изд-во Том. гос. архит.-строит. ун-та, 2017. - 172 с.
- Автомобили: Испытания: учеб. пособие для вузов / В.М. Беляев, М.С. Высоцкий, Л.Х. Гилелес; под ред. А.И. Гришкевича, М.С. Высоцкого. - Минск: Высш. шк., 1991.
- А.с. СССP № 1478067 Стенд для испытания трансмиссий / А.А. Бунос, А.В. Вовк, В.В. Геращенко, А.Г. Миронов - № 4309424/25-28; заявл. 28.09.1987; опубл. 07.05.89, Бюл. №17.
- А.с. 1605149 СССP. Стенд для испытания ведущих мостов транспортных средств / Ю.Н. Филин. - № 4615267, заявл. 05.12.1988; опубл. 07.11.90б Бюл. № 41.
- Патент 2207535 РФ. Стенд для испытания трансмиссий машин / А.Н. Лукьянчиков, И.К. Морозихина, В.Е. Харламов. - № 2002104512/28; заявл. 19.02.2002; опубл. 27.06.2003.
- Zhao, L. Research on Travel Control System of Hydrostatic Transmission Chassis / Liang Zhao, Jin Wang, Zhengwu Zhang // MATEC Web of Conferences. - 2017. -Vol. 139 (5). - Article number 00212.
- DOI: 10.1051/matecconf/201713900212
- Zhao, L. Research on vehicle speed control strategy of multi-axis hydrostatic transmission / Liang Zhao, Jin Wang, Zhengwu Zhang // Atlantis Press in Proceedings of the 2018 3rd International Workshop on Materials Engineering and Computer Sciences (IWMECS 2018). - 2018.
- DOI: 10.2991/iwmecs-18.2018.88
- Zhang, J. Research on straight driving strategy of tracked vehicle equipped with hydrostatic transmission / Jinle Zhang, Feihong Mao, Jing Guo // Computer Science Published in 2nd International Conference. - 2017.
- DOI: 10.1109/icrae.2017.8291375
- Comellas, M. Efficiency analysis of a multiple axle vehicle with hydrostatic transmission overcoming obstacles / M. Comellas, Jordi Pijuan, J. Roca // Engineering. Published. - 2018. - Vol. 56 (3). - С. 1-23.
- DOI: 10.1080/00423114.2017.1343954
- Hydrostatic Transmissions | Dana Off-Highway. - http://www.dana.com/off-highway/products/ transmission-and-electronic-controls (дата обращения: 03.12.2019).
- Kondakov, S.V. Simulation modeling of the curvilinear motion of an industrial tractor with a differential rotation mechanism and tracking trajectory stabilization system / S.V. Kondakov, A.A. Dyakonov, N.V. Dubrovskiy // MATEC Web of Conferences. - 2018. - Vol. 224. - Article number 02098.
- DOI: 10.1051/matecconf/201822402098
