Стратегия поддержания равновесия человека при наклоне корпуса вперед на узкой опоре

Автор: Александров А.В., Фролов А.А., Масьон Ж.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 4 (18) т.6, 2002 года.
Бесплатный доступ
Две поведенческие цели одновременно решаются при наклоне корпуса человеком: наклон как таковой и поддержание равновесия. С помощью биомеханической модели исследуется, как эти цели достигаются. Исследование основано на разложении движения по собственным векторам динамического уравнения. Теоретически найдена координация между позой и движением, при которой наклон корпуса может быть осуществлен на бесконечно узкой опоре («оптимальный наклон» без перемещения центра давления). Оптимальное движение сравнивается с экспериментально наблюдаемым. Предлагается гипотеза, что движения вдоль собственных векторов являются независимо управляемыми, но координируемыми основной и позной компонентами движения. Основная компонента обеспечивает наклон как таковой, а позная - упреждающим образом компенсирует возмущение равновесия, вызванное основной компонентой. Результаты моделирования позволяют объяснить модель электромиографической активности, наблюдаемую при наклонах корпуса вперед.
Двигательная координация, поддержание равновесия у человека, синергия, моторный контроль, поза и движение, многосуставное движение, компьютерное моделирование
Короткий адрес: https://sciup.org/146215748
IDR: 146215748 | УДК: 531/534:57+612.7
Текст научной статьи Стратегия поддержания равновесия человека при наклоне корпуса вперед на узкой опоре
Наклон корпуса у вертикально стоящего человека относится к классу движений, при которых кроме решения основной кинематической задачи (наклон как таковой) важное значение имеет и одновременное решение второй, функционально отличной задачи сохранения равновесия. Гипотеза о том, что в любом двигательном акте можно выделить две составляющих, основную, направленную на достижение цели, и позную, связанную с необходимостью сохранения равновесия, была выдвинута в работах [1, 2]. Дальнейшие исследования показали, что позная компонента часто начинается раньше основной, упреждающим образом подготавливая условия, при которых возмущение равновесия, вызванное ожидаемым основным движением, будет минимизировано [3, 4].
Координация между позой и движением исследовалась у человека в основном на примерах, в которых целью движения было перемещение рук при стабилизации корпуса. Однако проблема поддержания равновесия значительно усложняется, когда целью движения становится не стабилизация , а перемещение корпуса. При взаимном
перемещении массивных звеньев корпуса разделение движения на основную и позную компоненты не очевидно, как при движении рук. Известно, что наклон корпуса сопровождается противоположным наклоном ног [5]. В этом случае было предложено считать, что изменение угла в тазобедренном суставе есть целенаправленное движение, управляемое «основным» контроллером, а противоположное «непроизвольное» вращение в голеностопном суставе есть сопутствующая позная компонента [6]. Однако такому разделению движения на основную и позную компоненты противоречат известные данные электромиографического (ЭМГ) анализа активации аксиальной мускулатуры при наклонах корпуса у человека. При наклоне корпуса вперед ноги отклоняются назад. Если предположить, что такое отклонение ног есть упреждающая позная компонента, то движение должно начинаться с активации экстензоров голеностопного сустава. Однако реально оно начинается с активации его флексоров [7, 8]. Таким образом, остается неясным, можно ли выделить позную компоненту при организации двигательного управления во время наклона корпуса у человека, и если можно, то что именно относится к основной, а что к позной компонентам, и как осуществляется их координация?
Основной целью данной работы является теоретическое исследование двигательной стратегии (координации между позой и движением), позволяющей решить проблему сохранения равновесия при выполнении человеком наклонов корпуса вперед. Для этого теоретически проанализирована возможность выполнения движения при усложнении условий сохранения равновесия путем неограниченного уменьшения размеров опоры. Полученные результаты численного эксперимента позволяют объяснить с биомеханической точки зрения наблюдаемую экспериментально кинематическую модель движения во время наклона корпуса у человека, а также объяснить наблюдаемую при этом модель ЭМГ.
Трехзвенная биомеханическая модель
В работах, посвященных исследованию биомеханики тела человека в сагиттальной плоскости, достаточно широко используется модель тела в виде перевернутого маятника из трех жестких звеньев, вращающихся в трех цилиндрических шарнирных суставах [9–12]. При этом верхнее звено объединяет корпус, руки и голову, средним звеном являются бедра, а нижним звеном – голени. Тремя суставами являются тазобедренный, коленный и голеностопный суставы. В настоящей работе использовалась такая же трехзвенная модель.
Три суставных угла были выбраны в качестве независимых переменных, описывающих кинематику движения тела человека в рамках модели трехзвенника: угол в голеностопном ϕ A ( A – Ankle ), коленном ϕ K ( K – Knee ) и в тазобедренном ϕ H ( H – Hip ) суставах (рис. 1).
Перевернутый трехзвенный маятник предполагается стоящим на стопе, которая в сагиттальном сечении имеет треугольную форму [13]. Проскальзывание между стопой и опорой исключается. Шарниры, соединяющие звенья модели, считаются идеальными, т.е. безфрикционными, а звенья рассматриваются как твердые тела. Движение модели рассматривается в сагиттальной плоскости без отрыва точек опоры. Кроме того, принято допущение, что центры масс звеньев расположены на линиях, соединяющих соответствующие шарниры.
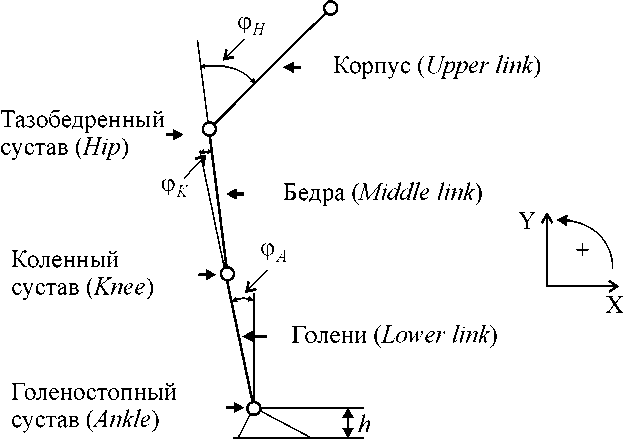
Рис. 1. Биомеханическая трехзвенная модель тела человека в сагиттальной плоскости.
ф A , ф K и ф H - суставные углы
Уравнение движения в поле сил тяжести для системы из N звеньев, соединенных последовательно в цепочку с помощью N цилиндрических шарниров, приведено в работе [9] в терминах углов наклона звеньев относительно вертикали. В случае системы из трех звеньев с тремя цилиндрическими шарнирами уравнение движения имеет вид:
С '(0)0 - D'(0)0 + A'(0,0) = NT , где θ является вектором углов наклона звеньев относительно вертикали, T есть вектор суставных моментов, C' и D' являются соответственно инерционной и гравитационной матрицами, A' является вектором, определяющим центробежные и кориолисовы силы, (1 -1 0)
а N = 0 1
10 01
Для перехода от записи уравнения движения в терминах углов наклона 0 к записи в терминах суставных углов ф необходимо сделать замену переменных 0 = иф , где U = (N -1) T . В этом случае уравнение движения принимает вид
-
с(ф)ф - Dto> + А(ф,ф) = т ,
где С ( ф ) = U T C ' ( 0 ) U , D ( ф ) = U T D ' ( 0 ) U и А ( ф , ф ) = U T A ' ( 0 , 0 ). Здесь и ниже первая, вторая и третья компоненты каждого из векторов относятся соответственно к голеностопному, коленному и тазобедренному суставам.
В уравнение движения входят антропометрические параметры: длины звеньев, их массы, расстояния между их центрами масс относительно нижележащего сустава, а также их моменты инерции относительно центров масс. Для оценки данных параметров использовались усредненные «стандартные» антропометрические коэффициенты, приводимые в антропометрических таблицах [14].
Выражения для элементов матриц C и D и вектора А , а также для перемещений центра тяжести и центра давления приведены в Приложении.
Линейное приближение: собственные векторы уравнения движения
Для детального исследования особенностей двигательной координации был проведен анализ уравнения движения в линейном приближении вблизи вертикального положения звеньев тела | ф |<<1.
В этом приближении уравнение движения (1) принимает вид
Сф - Dф = T , (2)
где, в отличие от уравнения движения (1), элементы инерционной матрицы C и гравитационной матрицы D не зависят от суставных углов и определяются как С = С ( 0 ), D = D ( 0 ), а также принято допущение о пренебрежимой малости центробежных и кориолисовых сил по сравнению с инерционными и гравитационными, т.е. в уравнении (1) положено A = 0 . В работе [15] показано, что ошибка линейного приближения при расчете суставных углов по заданным суставным моментам (т.е. при решении прямой задачи динамики) приводит к ошибкам не более 4% от амплитуд углов вплоть до амплитуды наклона 55 ° .
Линеаризованное уравнение движения (2) позволяет провести разложение любого трехсуставного движения на три компоненты (три «собственных движения»), каждая из которых в пространстве трех суставных углов представляет собой движение вдоль одного из трех собственных векторов w i ( i = A , H , K) уравнения движения (2):
ф = WE , (3)
где W есть матрица 3 x 3, столбцами которой являются собственные векторы w A , w H и w K , при этом собственный вектор w i ( i = A , H , K) по определению удовлетворяет уравнению
Cw i = X i Dw i , (4)
где X i есть соответствующее собственное значение. Вектор Е = { E A , Е К , E H } T назовем вектором кинематических амплитуд собственных движений. Его компоненты Е А ( t ), E H (t ) и Е к ( t ) находятся по известным суставным углам ф путем обратного решения уравнения (3):
Е ( t ) = W - 1 ф ( t ). (5)
Значение нижних индексов A , H и K в применении их к собственным векторам поясняется ниже.
Векторное уравнение движения (2), записанное в терминах суставных углов ф , в терминах кинематических амплитуд ξ распадается на три независимые скалярные уравнения
-
-X iЕi + Е i = n i ( i = A , H , K ), (6)
каждое для отдельной кинематической амплитуды Е i .
Назовем скалярные функции n i ( t ) в уравнении (6) «динамическими амплитудами» собственных движений (по аналогии с кинематическими амплитудами Е i ), каждая из которых определяет временной ход моментов сил в суставах в соответствующем собственном движении.
Вектор суставных моментов Т представляется в виде:
T = - DWn = u A П A ( t ) + u H n H ( t ) + u K n K ( t ) , (7)
где векторы
U i = - Dw i (8)
являются столбцами матрицы - DW .
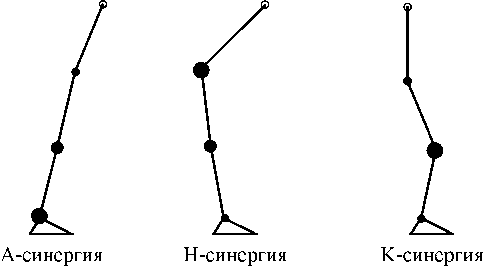
Рис. 2. Кинематическая и динамическая модели собственных движений (синергий). Размеры кружков, обозначающих суставы, пропорциональны абсолютным величинам моментов сил в суставах в каждой из синергий
Как видно из уравнений (3) и (7), если движение является собственным для данной биомеханической системы, т.е. происходит вдоль какого-либо собственного вектора w i , то компоненты этого вектора определяют отношения между изменениями суставных углов, а компоненты соответствующего вектора u i определяют отношения между изменениями суставных моментов в данном собственном движении.
Три собственных вектора w i , соответствующие им собственные значения X i и векторы u i были вычислены согласно уравнениям (4) и (8), с использованием антропометрических коэффициентов [14] для «стандартного испытуемого» массой 70 кг и ростом 1,7 м. Для такой «стандартной» антропометрии они составили
|
X A |
0,108 с |
2 , X H = |
0,020 с2 |
, X K = |
0,0021 с2, |
|||
|
'- 0,94 ' |
Г- 0,24 x |
Г- 0,33 |
^ |
|||||
|
w A = |
- 0,09 |
, w H = |
0,06 |
, wk = |
= |
0,80 |
, (9) |
|
|
. — 0,32 > |
< 0,97 ) |
<- 0,52 ; |
||||||
|
г 668,4 ' |
Г 32,1 ) |
Г |
6,3 ^ |
|||||
|
u A = |
382,5 |
, u H = |
- 41,4 |
, u K = |
- 96,0 |
. |
||
|
< 143,1 > |
<— 83,4 > |
< |
7,7 ) |
|||||
|
В уравнении (9) собственные векторы |
w i и |
соответствующие векторы u i |
||||||
( i = A, H, K) упорядочены по возрастанию собственных значений X i . Схематические диаграммы, представленные на рис. 2, иллюстрируют кинематические (соотношения между изменениями суставных углов) и динамические (соотношения между моментами сил в суставах) модели в каждом из трех собственных движений (собственных синергий), параметры которых приведены в (9).
В каждом из векторов w A и u A первая компонента, соответствующая голеностопному суставу, является доминирующей. Поэтому трехсуставное движение вдоль собственного вектора w A будет именоваться А-синергией (А – Ankle ), и все обозначения для параметров этого движения отмечаются нижним индексом «А». В векторе w А компоненты для изменений углов во всех трех суставах имеют один и тот же знак. Таким образом, A-синергия соответствует наклону, при котором отклонения нижнего, среднего и верхнего звеньев происходят в одну сторону, т.е. в целом происходит однонаправленное вращение всего тела относительно голеностопного сустава (рис. 2 слева).
В каждом из векторов w H и u H доминирующей является третья компонента, соответствующая тазобедренному суставу. Поэтому трехсуставное движение вдоль собственного вектора w H именуется ниже H-синергией (H – Hip ), и все обозначения для параметров этого движения отмечаются нижним индексом «H». В векторе w H компоненты для углов в голеностопном и тазобедренном суставах имеют противоположный знак, в то время как компонента для коленного сустава (вторая) близка к нулю. Таким образом, H-синергия соответствует наклону, при котором флексия в тазобедренном суставе сопровождается экстензией в голеностопном при незначительной экстензии в коленном (рис. 2 в центре). Подобная кинематическая модель близка к экспериментально наблюдаемому наклону корпуса вперед (рис. 1).
Наконец, в каждом из векторов w K и u K доминирующей является компонента для коленного сустава. Поэтому трехсуставное движение вдоль данного собственного вектора w K именуется ниже К-синергией (K – Кnee ) и для этого движения используется нижний индекс «К». К-синергия напоминает приседание за счет сгибания коленей при близком к поступательному вертикальному движению корпуса (рис. 2 справа).
Каждое из трех уравнений (6) представляет уравнение движения для перевернутого маятника. Три маятника ( i=A , H , K ) имеют разные инерционные свойства, определяемые собственными значениями X a , X я и X к . Как видно из (9), отношения собственных значений равны приблизительно 50:10:1, т.е. инерция движения по А-синергии приблизительно в 5 раз выше, чем инерция движения по Н-синергии. В свою очередь, инерция движения по Н-синергии приблизительно в 10 раз выше, чем по К-синергии.
Перемещения центра тяжести и центра давлений в собственных движениях
Согласно уравнениям (3), (7), (П1–П3) координаты общего центра тяжести СG и центра давлений СР в переднезаднем направлении, X CG и X CP , представляют собой алгебраическую сумму соответствующих координат CG и СР в каждом из собственных движений, которые определяются через кинематические и динамические амплитуды собственных движений:
X,CG = b, 5 , , VC = b, ( n , - h v ), (10)
где b = U i , /( Mg ), a Uy является первой компонентой вектора u , , сответствующей голеностопному суставу. Следует отметить, что согласно уравнению (4) знак любого из собственных векторов произволен. При выбранных в (9) знаках компонент собственных векторов w перемещение X CG в положительном направлении (вперед) соответствует положительному изменению кинематической амплитуды 5, .
Для «стандартного испытуемого» [14] массой 70 кг и ростом 1,7 м коэффициенты b составляют bA = 9,3-10—3 м/рад, 6H =4,5 -10—4 м/рад, 6K =8,5 -10—5 м/рад. (11)
Учитывая уравнения (6) и (10), получаем следующее уравнение, связывающее перемещения центра тяжести и центра давлений в каждом из собственных движений:
-
- (X, + h/g) XCG + XCG = XCP. (12)
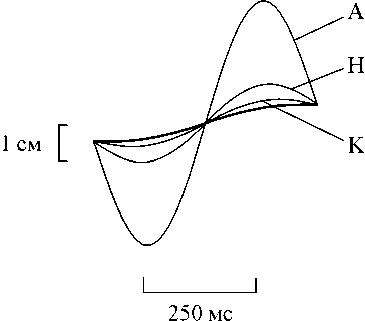
Рис. 3 Перемещение центра тяжести вперед (жирная линия) на 1 см за 500 мс и обеспечивающие данное перемещение изменения центра давлений (тонкие линии) в каждой (A-, H- и К-) из синергий
Общее решение уравнения (12) имеет вид:
XCG ( t ) = C i e - "т + C 2 e" + XCP ( t ) - 0,5( g „( t ) e -"T i + gn( t ) e "' i ), (13)
где C 1 и C 2 - произвольные постоянные, т 2 = X i + h/g , tt
-
gi i( t ) = j XCP ( p ) e-p'-dp , g „( t) = f XCP ( p)ep'''dp . (14)
Из всего класса решений (13) рассмотрим далее только те, которые начинаются из статического состояния и заканчиваются также статическим состоянием, как это происходит при экспериментально выполняемом наклоне корпуса с остановкой в наклонном положении.
Тогда перемещение центра давления происходит на некотором ограниченном отрезке 0 < t < T , и перемещение центра тяжести задается уравнением
XCG ( t ) = XCP ( t ) - 0,5 g' i( t ) e-t -'T i + 0,5( g' 2 (T ) - g' 2 (t )) e" 'T i . (15)
Рис. 3 демонстрирует соотношения между перемещениями центра тяжести CG (жирные линии) и центра давлений СР (тонкие линии) для каждого из собственных движений. При этом для иллюстрации было взято полное смещение центра тяжести величиной в 1 см, а переход из начального положения в конечное происходил за 500 мс. Для движения центра тяжести был выбран «типичный» временной ход XiCG ( t ) с колоколообразным профилем скорости и с нулевыми значениями первой и второй производной по времени в начале и в конце движения [16]. Затем по уравнению (12) вычислялись перемещения центра давления.
В каждом из собственных движений начальное смещение центра давления СР инициирует «толчок» центра тяжести CG, в результате которого CG приобретает ускорение в противоположном направлении (рис. 3). Затем СР «возвращается» и «обгоняет» CG, что приводит к торможению и последующей остановке центра тяжести.
Поскольку инерция движения по А-синергии самая высокая среди трех собственных движений, то один и тот же сдвиг центра тяжести AXCG за одно и то же время т может быть осуществлен по А-синергии за счет наибольшей экскурсии центра давления (т.е. наибольшим необходимым размером опоры, 6,5 cм во взятом примере). И, наоборот, благодаря малой инерции движения по К-синергии экскурсия CP при таком движении самая малая среди трех собственных движений (1,2 cм), а траектории центра давления СР и центра тяжести CG отличаются в К-синергии незначительно.
Таким образом, чтобы обеспечить смещение CG на 1 см за 500 мс, ширина опоры при движении по А-синергии должна быть не менее 6,5 см, а при движении по К-синергии – не менее лишь 1,2 см.
Казалось бы, что К-синергия является наиболее эффективной среди трех собственных движений для контроля за движением центра тяжести в переднезаднем направлении, поскольку она позволяет выполнять движение на самой узкой опоре. Однако, в соответствии с (10) и (11), для того чтобы обеспечить смещение центра тяжести заданной величины, К-синергия требует самой значительной амплитуды движения. Так, например, для смещения CG на 1 см по К-синергии «стандартному испытуемому» потребовалось бы осуществить движение с размахом кинематической амплитуды в 65 ° , что соответствует изменению угла в коленном суставе на 51 ° . В то же время аналогичное смещение центра тяжести по А-синергии достигается при кинематической амплитуде собственного движения лишь в 0,61 ° , что соответствует изменению угла в голеностопном суставе на 0,58 ° .
Моделирование наклона без перемещения центра тяжести или центра давления
В настоящем разделе теоретически исследуются две рабочие гипотезы о том, какой параметр, СG или СР, стабилизируется биомеханической системой при выполнении наклона корпуса для того, чтобы сохранить равновесие. С этой целью моделируются две крайние «идеальные» двигательные стратегии, при одной из которых наклон корпуса происходит при отсутствии каких-либо перемещений центра тяжести CG в переднезаднем направлении, а при второй – отсутствует перемещение центра давления СР. Экспериментальные данные показали, что К-синергия при наклоне корпуса вперед практически не дает вклада в кинематику движения и в перемещения CG и СР [17]. Поэтому ниже мы везде ограничиваем анализ рассмотрением лишь двух, Н- и А- синергий.
В соответствии с уравнением (10) движение по Н-синергии приводит к перемещению центра тяжести XH = bH Lн . Для полной компенсации этого перемещения собственное движение по А-синергии должно вызывать противоположное перемещение CG ( XCG = - XHG ). Тогда
LA ( t ) = — ( ЬнЬ № H ( t)• (16)
Учитывая (11), видим, что кинематическая амплитуда А-синергии составляет лишь 5% от амплитуды Н-синергии, т.е. полные угловые изменения на 95% описываются Н-синергией, в связи с чем мы будем называть ее основной, в то время как А-синергия, несмотря на ее низкую «представленность» в кинематике, полностью компенсирует перемещение CG по основной синергии, в связи с чем ее логично назвать сопутствующей позной компонентой движения.
Для численного эксперимента временной ход перемещения центра тяжести в движении по основной Н-синергии XHCG ( t ) был взят с «типичным» колоколообразным профилем скорости (рис. 3, жирная линия). Амплитуда перемещения центра тяжести по Н-синергии ^XH и его длительность т н были взяты равными соответственно XXH° = 4,5 см и т н = 510 мс. Такие параметры движения по Н-синергии соответствуют средним величинам, наблюдаемым экспериментально [16].
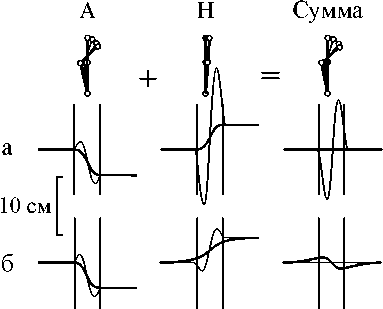
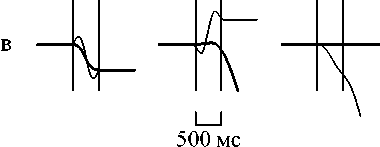
Рис. 4. Перемещения центра тяжести CG (жирные линии) и центра давлений CP (тонкие линии) в трех моделируемых типах наклона корпуса. Полные перемещения (правые графики) представлены в виде суперпозиции соответствующих перемещений в Н- и А-синергиях. Диаграммы сверху иллюстрируют кинематическую модель синергий. Движение моделируется с неподвижным полным (суммарным) CG (а) или с неподвижным полным CР (б, в).
Вертикальные линии на всех графиках отмечают начало и конец движения в Н-синергии
Рассматриваемое движение представлено на рис. 4а. Перемещение центра тяжести в Н- и А-синергиях показано жирными линиями. Перемещения центра давления, рассчитанные по формуле (12), показаны тонкими линиями. Вертикальными отрезками на всех графиках на рис. 4 отмечены начало ( t = 0) и конец ( t = T ) составляющей наклона по основной Н-синергии.
На рис. 4а (справа) показаны полные перемещения CP и CG, которые являются суммами соответствующих перемещений в Н- и А-синергиях. В то время как центр тяжести CG неподвижен, полный размах центра давлений CP составил 17,6 см. Таким образом, рассматриваемый наклон может быть выполнен только при условии, что размеры опоры в переднезаднем направлении превышают 17,6 см, несмотря на то, что центр тяжести не перемещается совсем.
Наблюдаемый экспериментально размах СР составляет 5–8 см [17], что существенно меньше полученного для движения без перемещения СG. Это позволяет заключить, что стратегия поддержания равновесия при реальном наклоне корпуса человека не направлена на полную стабилизацию перемещения центра тяжести в переднезаднем направлении.
Возникает естественный вопрос, возможно ли с биомеханической точки зрения в принципе выполнить наклон корпуса без какого-либо перемещения центра давления, сохранив при этом равновесие? Такое гипотетическое движение можно было бы совершить на бесконечно узкой планке («на лезвии ножа»), и в этом смысле его можно назвать «оптимальным наклоном» с точки зрения сохранения равновесия.
Пусть перемещение центра тяжести и давления XHCG и XHCP по основной Н-синергии, обеспечивающей наклон как таковой, будут те же, как на рис. 4а (слева). Для наглядности кривые продублированы на рис. 4б (слева).
CP
Для компенсации перемещения центра давлений XHC , вызываемого Н-синергией, А-синергия должна быть скоординирована таким образом, чтобы вызывать перемещение СР, равное по абсолютной величине, но противоположное по знаку: XCP = -XHP (рис. 4б, тонкая линия на среднем графике). Тогда согласно уравнению (15) для перемещения центра тяжести по А-синергии справедливо уравнение
XCG(t) = -XH(t)-0,5gAi(t)e-t'TA + 0,5(g,2(T) - gA2
tt gAi(t) = -JXHP(p)e-"TAdp, gA2(t) =-JXHP(p)ep/TAdp• (17) 0 0
Перемещение CG по А-синергии показано на рис. 4б (центр) жирной линией. Суммарное перемещение центра тяжести показано на графике рис. 4б (справа) жирной линией. Экскурсия суммарного перемещения центра тяжести CG составила 1,55 см, в то время как суммарный центр давления СР неподвижен. Сравнительно малая экскурсия CG свидетельствует о том, что кинематическая амплитуда движения по Асинергии так же мала, как в случае без перемещения CG, а основная Н-синергия и в оптимальном наклоне описывает около 95% кинематики.
Как видно из рис. 4б, оптимальный наклон разделяется на три фазы. В начальной фазе ( t <0) присутствует только движение по А-синергии. В этой фазе перемещение CG задается уравнением XCG ( t ) = 0,5 gA 2( T ) et T A . В средней фазе (0 < t < T) присутствуют составляющие движения как по А-синергии, так и по основной Н-синергии. И, наконец, в заключительной фазе ( t > T) вновь движение совершается только по А-синергии XCG ( t ) = - XHP ( t ) - 0,5 gA 1( t ) e~ T A .
В начальной фазе гипотетический испытуемый пассивно падает вперед под действием силы тяжести, как перевернутый маятник, выведенный из положения равновесия. Такое начальное падение вдоль собственного вектора w A предполагает, что движение инициируется тремя бесконечно малыми моментами сил в суставах, причем соотношения между величинами запускающих моментов определяются вектором u A , приведенном в уравнении (9). Как видно на рис. 4б (справа), на протяжении начальной фазы центр тяжести CG расположен спереди от центра давления СР. При этом он постепенно увеличивает свою скорость под действием направленной вперед силы реакции опоры. Характеристическое время пассивного падения составляет t a = 0,34 с.
В течение средней фазы смещение центра тяжеста CG вперед, вызванное высокоинерционной А-синергией, останавливается, и CG даже смещается назад по отношению к начальному положению благодаря включению основного собственного движения по менее инерционной Н-синергии. Такая реверсия движения общего центра тяжести связана с тем, что Н-синергия при наклоне корпуса вперед вызывает смещение CG назад. С динамической точки зрения это происходит под действием силы реакции опоры, которая в данном случае при инициации движения по Н-синергии направлена назад. К концу средней фазы движение по основной Н-синергии прекращается, а центр тяжести, находясь позади точки опоры, вызывает силу реакции опоры, направленную назад. При этом CG имеет скорость по А-синергии, направленную вперед.
Наконец, в заключительной фазе движение CG вперед по А-синергии тормозится направленной назад силой реакции опоры. Движение вдоль вектора w A в заключительной фазе уменьшается до нуля под пассивным действием силы тяжести, аналогично перевернутому маятнику, который возвращается в положение неустойчивого равновесия.
Возникает вопрос, возможно ли совершить наклон на бесконечно узкой опоре без потери равновесия при условии, чтобы избежать движения в первой и/или третьей фазах. Иными словами, возможно ли найти такое перемещение X HCG ( t ) , чтобы gA1(T ) = 0, и/или gA 2( T ) = 0. Подстановка в формулу (17) выражения для XHG, полученного по формуле (12), дает
T gA1(T) = A J X H (t) e " "T Adt,
T gA 2(T) = A J X H (t) et4 Adt, где A = (XH + h/g)/(XA + h/g) -1 ^ 0 . С учетом предположения о колоколообразности профиля скорости собственного движения XCHG оба интеграла отличны от нуля, т.е. искомого собственного движения XACG для наклона корпуса человека на бесконечно узкой опоре не существует. Следует, однако, заметить, что такое движение возможно, если наклон осуществляется немонотонно.
Рис. 4в иллюстрирует невозможность выполнения наклона со стандартным колоколообразным профилем скорости без предваряющего движения по А-синергии. Как видно из рисунка, отрицательное начальное перемещение СР в высокоинерционной А-синергии (тонкая линия в центре) слишком незначительно, чтобы вызвать достаточно большое перемещение СG вперед в этой синергии (жирная линия в центре). В результате перемещение СG назад в основной Н-синергии остается нескомпенсированным и гипотетический испытуемый начинает падать назад со все нарастающей скоростью ( рис. 4в, справа).
Обсуждение результатов
Две поведенческие задачи решаются одновременно при выполнении наклона корпуса: наклон как таковой и поддержание равновесия. Основная цель работы состояла в исследовании двигательной стратегии, которую использует человек для решения этих двух задач.
В линейном приближении, которое оказалось справедливым при наклоне корпуса вплоть до 50-60°, движение было представлено в виде линейной суперпозиции трех синергичных «собственных» движений, соответствующих трем собственным векторам и собственным значениям линеаризованного уравнения движения. В каждое собственное движение вовлечены все три суставных угла пропорционально значению соответствующей компоненты собственного вектора. По доминирующему вкладу от того или иного сустава в изменение суставных углов и моментов сил в каждом из собственных движений (рис. 2) они были названы «A»-, «H»- и «K»-синергиями (Ankle – голеностопный сустав, Hip – тазобедренный сустав, Knee – коленный сустав). Основным преимуществом перехода от описания движения в терминах суставных углов к его описанию в терминах собственных движений является распад системы связанных динамических уравнений на три независимых уравнения для каждого собственного движения в отдельности. Каждое из трех независимых уравнений есть уравнение движения для перевернутого маятника со значительно отличающимися инерционными характеристиками. Собственные движения по А- и К-синергиям оказались соответственно наиболее и наименее инерционными (собственное значение для А-синергии приблизительно в 50 раз больше, чем для К-синергии), а собственное движение по Н-синергии – «среднеинерционным» (собственное значение для Н-синергии приблизительно в 5 раз меньше, чем для А-синергии). Дополнительным преимуществом такого методического подхода явилась возможность исключить из рассмотрения К-синергию, поскольку при реальном выполнении наклона корпуса вперед ее вклад в кинематику и динамику оказался пренебрежимо малым [17]. Таким образом, анализ биомеханической системы с тремя степенями свободы свелся к анализу системы с двумя степенями свободы (А- и Н-синергиям).
Было смоделировано «оптимальное» движение, в котором выполняются максимально жесткие требования к возможности сохранения равновесия. Поскольку равновесие не нарушается лишь в том случае, если центр давления находится внутри границ опоры, было принято по определению считать наклон оптимальным, если равновесие не нарушается даже тогда, когда эти границы можно было бы предельно сузить. Иными словами, при оптимальном наклоне равновесие сохраняется при неподвижном центре давления. Показано, что выполнение наклона корпуса без перемещения центра давления требует очень сложной координации двух собственных движений: моменты запуска и остановки движений и величины усилий должны быть тщательно подобраны. Координация собственных движений состоит в тонко настроенной балансировке между моделью внутренних мышечных усилий и внешними гравитационными силами с целью обеспечить в результате необходимый временной ход горизонтальной компоненты силы реакции опоры, которая управляет движением CG в переднезаднем направлении. Запуск движения по Н-синергии (левые вертикальные отрезки на рис. 4б) должен быть выбран точно в момент, когда скорость движения CG вперед по А-синергии уже достаточно большая, чтобы скомпенсировать предстоящее движение СG назад по Н-синергии. Аналогично остановка движения по Н-синергии (правые вертикальные отрезки на рис. 4б) должна произойти точно в момент, когда CG уже находится сзади от точки опоры, а величина остаточной скорости движения CG вперед по А-синергии в точности такова, чтобы CG вернулся и остановился в начальном положении.
В экспериментально наблюдаемом движении [17], как и в гипотетическом оптимальном движении, движение по Н-синергии описывает более 95% угловых изменений. Движение по А-синергии также сопровождается смещением центра тяжести вперед, компенсируя его смещение назад, провоцируемое Н-синергией. При этом разгон СG вперед по А-синергии также начинается раньше движения по Н-синергии.
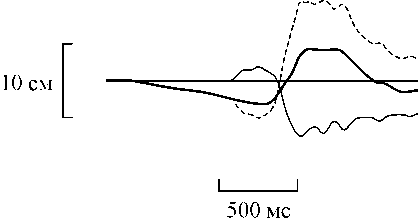
Рис.5. Перемещения центра давлений в Н-синергии (тонкая линия), в А-синергии (пунктир) и его полное (суммарное) перемещение (жирная линия) при типичном экспериментальном наклоне корпуса вперед.
Различие между экспериментальным и гипотетическим оптимальным наклонами состоит в различном способе инициации упреждающего движения центра тяжести вперед по А-синергии. На рис. 5 показана типичная запись перемещений центра давления при экспериментальном наклоне корпуса вперед (описание методики эксперимента приведено в [17]. В начальной фазе экспериментально наблюдаемого движения присутствует вклад флексорного момента сил в голеностопном суставе. Такой момент сил, разгоняющий центр тяжести вперед, вызывает небольшое перемещение центра давления назад, соответствующий начальному участку кривых на рис. 5. Таким образом становится понятным функциональное значение наблюдаемой обычно ранней активации флексоров голеностопного сустава [6-8, 18-20]. Смысл этой ранней активации - упреждающее ускорение центра тяжести вперед по А-синергии с целью снижения возмущения равновесия при последующем запуске Н-синергии.
Результаты исследования позволяют выдвинуть гипотезу, что собственные движения не является лишь формальным инструментом для удобного анализа уравнения движения, а представляют для центральной нервной системы две независимые, но координируемые единицы двигательного управления, которые служат для решения двух функционально разных поведенческих задач: Н-синергия обеспечивает выполнение основной кинематической задачи (наклон как таковой), а Асинергия есть сопутствующая позная компонента движения, обеспечивающая сохранение равновесия. В пользу данного предположения свидетельствуют следующие аргументы.
-
1. В каждом из собственных движений суставные углы и моменты сил в суставах изменяются синхронно во всех трех суставах. Таким образом, собственное движение, как по кинематике, так и по динамике, имеет относительно простую организацию в виде одномерной временной развертки с одной определенной инерцией. Движение тела в сагиттальной плоскости с любой другой моделью изменения суставных углов является «составным» по своим инерционным характеристикам (представляет суперпозицию разных по инерции собственных движений) и, следовательно, требует более сложного управления. Сложность управления «составным» движением связана с тем, что, как оказалось, собственные движения имеют существенно разные инерции и, таким образом, требуют управляющих сигналов с существенно различающимися временными характеристиками.
-
2. Экспериментально наблюдаемая кинематическая модель наклона корпуса вперед в основном обеспечивается движением по Н-синергии. Следовательно, логично рассматривать Н-синергию как основное движение, обеспечивающее наклон как таковой. А-синергия незначительно представлена в наблюдаемой кинематике. Тем не менее, ее вклад в наблюдаемые перемещения центров тяжести и давления мог быть значительным. У некоторых испытуемых она практически не наблюдалась, у других она перекомпенсировала смещение центра тяжести, провоцируемого Н-синергией [17]. Следовательно, логично рассматривать А-синергию как сопутствующую (полезную, но не обязательную) позную компоненту движения, обеспечивающую компенсацию динамических возмущений равновесия, которые вызывает основная Н-синергия. При уменьшении размеров опоры амплитуда А-синергии возрастала у тех испытуемых, у которых в норме она была мала, и снижалась в противоположном случае [17]. При этом амплитуда Н-синергии не изменялась. Таким образом, рассматриваемые синергии могут управляться независимо.
-
3. В пользу того, что А-синергия является позной составляющей движения, служит тот факт, что она в среднем опережала и длилась дольше, чем основная Н-синергия. Как показали результаты моделирования оптимального наклона, такая координация основной и позной компонент движения объясняется разницей их
инерционных характеристик. Опережающая активация позной компоненты является типичной при организации многосуставных движений, в которые вовлечены сегменты со значительно различающимися инерционными характеристиками [3, 21].
Работа поддерживалась грантами РФФИ (проекты 02-04-48410а и 01-04-48924а) и РГНФ (проект 00-06-00242а).
