Структурный анализ оборудования раскряжевочных установок для первичной обработки древесных хлыстов

Автор: Лозовой В.А., Балдаков И.А., Миронов Г.С.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Техника
Статья в выпуске: 4, 2014 года.
Бесплатный доступ
В статье дан структурный анализ оборудования раскряжевочных установок для первичной обработки древесных хлыстов.
Технологический процесс, система координат, структурная формула, переходная матрица
Короткий адрес: https://sciup.org/14083634
IDR: 14083634 | УДК: (374.05
Structural analysis of the bucking installation equipment for the primary processing of wood whips
The structural analysis of the bucking installationequipment for the primary processing of wood whips is given in the article.
Текст научной статьи Структурный анализ оборудования раскряжевочных установок для первичной обработки древесных хлыстов
Для создания оборудования нового поколения раскряжевочных установок необходим детальный анализ существующего оборудования и устройств, что даст возможность определить направления синтеза новых технологических структур для первичной переработки древесного сырья. Для анализа используем матричные преобразования координат, которые позволят формализовать структуру оборудования [2].
Рассмотрим наиболее распространённый механизм для разобщения хлыстов типа РРУ, ПРХ-2, например РРУ-10М. Определим функциональные возможности РРУ.
Структуру РРУ-10М рассмотрим более подробно.
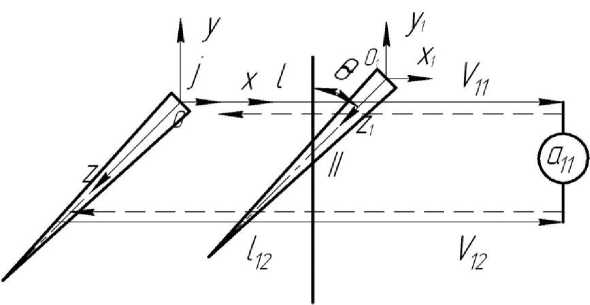
Рис. 1. Структурный граф РРУ: a 11 – операция разобщения пакета; → рабочий ход РРУ;
--→ холостой ход РРУ; ∠ Ө – угол между осью хлыста и направлением, например, подающего транспортера; V 11 , V 12 – скорость движения ветвей РРУ; l 11 , l 12 – расстояние линейного перемещения ветвей РРУ
При V 11 = V 12 производится линейное перемещение хлыста, перпендикулярное продольной оси хлыста. При V 12 = 0 и V 11 > 0 производится поворот хлыста на z(+ 0 ) ; при V 12 > 0 и V 11 = 0 - поворот на z(- 0 ) .
Первый хлыст ориентирован относительно координат OXYZ (рис. 1) следующим образом: продольная ось хлыста совпадает с осью Z; оси X, Y направлены в радиальных направлениях комлевого среза хлыста. При этом соблюдаются следующие условия:
-
- система координат OXYZ неподвижна относительно хлыста;
-
- хлыст во время перемещения не поворачивается относительно продольной оси.
Система координат OXYZ является в данном случае базовой, и все перемещения хлыста с изменением координат будут характеризоваться относительно этой системы.
Структурная формула объекта нашего анализа [1], записанная в матричной сокращенной форме, определится результирующей матрицей 5×5 (1)
в = В л &1М (1)
-
1 1 = 1 11 = 1 12 ,
где В л - матрица линейного перемещения;
i - вектор направления перемещения;
-
11 - расстояние, на которое переместится начало координат системы O 1 X 1 Y 1 Z 1 ;
-
11 - время, затраченное на перемещение 11 .
Возможность РРУ поворачивать хлыст на угол Ө определяется следующим образом:
в=В вр ае^-В л (I,i 1 ,t 1 ) , (2)
где Ввр - матрица поворота вокруг оси Y (базовый единичный вектор j ) на угол 0 ;
-
12 - время поворота.
Полное перемещение РРУ с холостым и рабочим ходом ветвей, поправкой хлыста записывается следующим образом:
В = В лх (В ^ х > X . х ) ' (в — 1 х < X . х ) ' В лр (в 1 р 1 < 1 р 1 ) ' В вр (В е , 2 ) ) ' В лр (В 1 1 < 1 ) ) (3)
где В - результирующая матрица, определяющая координаты хлыста в системе OXYZ;
I х , 1 х - расстояние и время холостого хода соответственно;
I р 1> 1р1 - расстояние и время рабочего хода при разобщении пакета соответственно;
-
, 1:1. - расстояние и время подачи хлыста в зону гидроманипулятора или непосредственно в зону раскряжевки соответственно.
Структурный анализ гидроманипуляторов ЛО-13С, ЛП-03 (ЛО-126). Гидроманипулятор (ГМ) ЛО-13С двухстреловой, неповоротный. Каждая стрела обладает двумя степенями свободы. Захват ствола дерева (хлыста) производится захватом без ориентации в пространстве (рис. 2).
I и II гидроманипуляторы (с зажатым в захватах хлыстом) в совокупности обеспечивают хлысту четыре степени подвижности. Достигается это изменением углов поворота стрел <р 1 и <р 2 , а также углов поворота рукоятий а1 и а 2 .
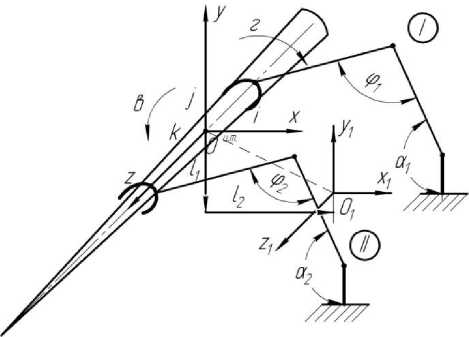
Рис. 2. Схема сдвоенного ГМ ЛО-13С
Из четырех перемещений главными будут перемещения в горизонтальной и вертикальной плоскостях (подача хлыста), остальные – вспомогательные.
В упрощенном виде расстояние ОО 1 (рис. 2) можно представить как траекторию или описать в виде изменения координат матрицами, которые учитывают время перемещения t .
Перемещение ОО 1 (рис. 2) равно сумме векторов l 1 + l 2 = ОО 1 .
Структурная формула будет иметь вид:
в = в( аь Л)- л ( ai2 ); (4)
в = В (&1М- Л ( (i,l 2 ,t 2 ) ; (5)
где В - результирующая матрица, которая определяет координаты ц.т. хлыста в результате преобразования координат;
ВЛ - переходная матрица, отражающая перемещение по вектору j или изменение координаты у ;
В Л - переходная матрица, отражающая перемещение по вектору i или изменение координаты x ;
t - время, затраченное при перемещении по вектору OO i . Учитывается только в одной из переходных матриц (4);
tr , 22 - время, затраченное при изменении координат х, у соответственно (несовмещенное перемещение).
При известном расстоянии ОО 1 и при совмещении перемещений стрел и рукоятей перемещение из точки О в точку О 1 запишется проще
В = В [i,j, O О^^, (р2,a i ,а 2 ), t]- (6)
Выражение (6) при любой траектории перемещения хлыста можно привести к более простому – (4) или (5) и более удобному для структурного анализа, поскольку в (6) использованы параметры ГМ, которые определятся при проектировании. А исходными данными будут (4) или (5), в зависимости от которых определятся L i , L 2 , q) i, (р 2, ai, а2 с необходимыми ограничениями.
Гидроманипулятор сучкорезно-раскряжевочной машины ЛО-126 на базе сучкорезной машины ЛП-33 относится к типу стреловых ГМ, которые обеспечивают попадание захвата (сучкорезных ножей) в определенную точку пространства без ориентации захватного органа.
На рисунке 3 представлена схема преобразования координат при выполнении технологической операции стреловым ГМ, при условии: хлыст в захвате ГМ; ось z 0 направлена вдоль продольной оси хлыста.
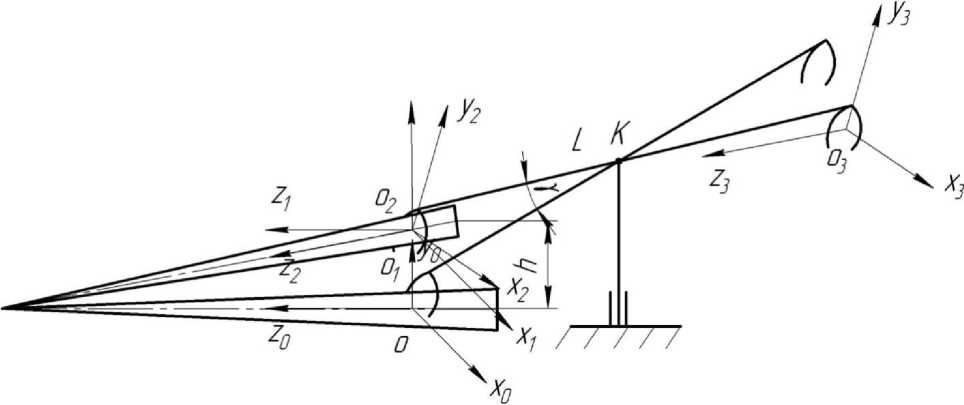
Рис. 3. Схема преобразования координат при выполнении стреловым ГМ цикла операций
OX 0 Y 0 Z 0 – базовая система координат; O 1 X 1 Y 1 Z 1 – система координат на поднятом хлысте на высоту h=OO 1 ; O 2 X 2 Y 2 Z 2 – система координат, учитывающая поворот хлыста на угол γ; O 3 X 3 Y 3 Z 3 – система координат, учитывающая положение хлыста после протаскивания на длину стрелы L.
Координата точки захвата хлыста после цикла перемещения в базовой системе координат OX 0 Y 0 Z 0 запишется следующим образом (матрица 4×4):
В = л л fthy Bep &Г)- л л (k,L) л л (J,H), (7)
где В - результирующая матрица с координатами в системе OX 0 Y 0 Z 0 ;
B п (j, h) - переходная матрица линейного перемещения точки захвата на высоту h;
B вр (i,y) - переходная матрица поворота стрелы до параллельности осей стрелы и хлыста на угол y;
Вп(к, В) - переходная матрица линейного перемещения хлыста вдоль стрелы ГМ на расстояние L ;
В п (j, Н) - переходная матрица перемещения хлыста при сбросе с высоты H .
С учетом времени перемещения t i имеем
В = Впa h, to • В^(I, Y,t 2 )• Л ((к, к , t3 )• В л(j, Н, t4) . (8)
При составлении расчетной схемы и преобразованиях координат принято: подъем хлыста осуществлен не по радиусу движения стрелы вокруг точки К (рис. 3), а по прямой ОО 1 .
Анализ бункерных разобщителей типа МСГ-3, ЛТХ-80, СМ-18. При моделировании необходимо учесть время t выдачи хлыстов. При наличии данных о пути хлыста l без неподвижных упоров на выдаче и скорости V движения элеваторов можно определить t , что учтется переходной технологической матрицей 5×5 [1]
В = Л л (i,l, Q . (9)
Разобщению хлыстов обычно сопутствуют операции, выполняемые ГМ
В = B(-ll,tyB(j,-lr ,Ъ ), (10)
где I - перемещение ГМ к хлысту;
-
1Г - перемещение, например, при удалении хлыста;
-
t - среднее время на вспомогательную операцию.
Анализ ориентирующего оборудования. Ориентация необходима в поточных линиях для обеспечения программного метода раскряжевки хлыстов.
Продольными ориентирующими транспортерами оснащены поточные линии СТИ-1, СТИ-2, СТИ-3, ЛО-65, ЛО-26, Раума-Репола.
Переходная матрица 4×4 для ориентации запишется следующим образом:
В = Вп (k,l), (11)
где 'к - направляющий вектор по принятым ранее условиям. Он направлен вдоль оси хлыста;
l – расстояние продольного перемещения хлыста при ориентации. В общем случае l варьируемая величина, зависящая от наличия напённой гнили и качества разобщения.
При этом требуются вспомогательные операции ГМ: поправка, удаление обломков, удаление хлыстов.
B = В п(-i, X ) )• Вл& Р р) , (12)
где ) х, Рр - расстояние перемещений ГМ при холостом и рабочем ходе соответственно.
В последних разработках поточных линий для раскряжевки хлыстов нашли применение шнековые ориентирующие устройства, которые обеспечивают ориентацию с одновременным перемещением хлыстов поперек и вдоль продольной оси (рис. 4). Таким ориентирующим оборудованием оснащены линии СЛ-4, ЛО-105.
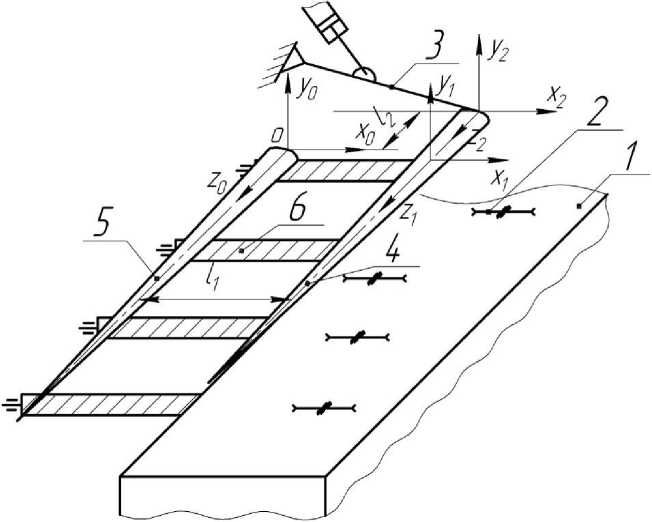
Рис. 4. Расчетная схема ориентации хлыстов шнековым транспортером: 1 – слешерный стол;
2 – торцующая пила; 3 – торцующая стенка; 4 – сориентированный хлыст;
5 – хлыст до ориентации по торцующей пиле, 6 – шнековый транспортер
Переходная матрица, описывающая процесс ориентации, запишется с учетом времени перемещения как
В — Л ((I, ^ i , ^ i ) • Лп(к., I 2),
где В - - матрица 5*5, учитывающая время перемещения;
-
t1 – время перемещения по двум координатам одновременно.
Из переходной матрицы (13) видно, что время учитывается в одной матрице, поскольку оно едино при движении по двум координатам одновременно. Операциям перемещения соответствуют вспомогательные действия ГМ в — вл (-. h) • Вп а, 12 ) • Лвр(к, <р), (14)
где ср - угол поворота хлыста при поправке.
Анализ оборудования для осуществления операции раскряжевки хлыстов. Операция раскряжевки подготовленных для выполнения этой операции хлыстов выполняется на линиях с продольной подачей во время остановки хлыста и определенным размером будущего сортимента. Как правило, это раскряжевочные установки с круглыми пилами маятникова типа.
Ось пильного диска маятниковой пилы описывает дугу радиусом R, при этом изменяются две координаты: x и y . При включении переходной матрицы в технологическую структурную формулу необходимо учесть: при выполнении операции раскряжевки маятниковой или балансирной пилой перемещений предмета труда не происходит, но временные затраты имеют место.
Технологическая матрица 5×5 с учетом времени воздействия на предмет труда запишется как (15) с учетом обратного хода пилы
В = В л (I, R, t) • В л d, R, 0) • В л (I, -R, t) • В л (J, -R, 0) . (15)
В переходной матрице (15) рабочий ход пилы по перемещению учитывается по двум координатам x , y через проекцию радиуса R. Холостой ход учитывается также по перемещениям в виде проекции R, но со знаком минус. В переходных матрицах (15) время холостого и рабочего хода учитывается только по одной проекции, поскольку обе проекции изменяются одновременно.
Раскряжевка хлыстов в потоках с поперечной подачей ведется непрерывно, что является главным достоинством, которое обеспечивает высокую производительность. В связи с этим главным элементом слеше-ра является транспортер надвигания с шагом между упорами надвигания l уп . Надвигаются хлысты со скоростью поперечного транспортера V .
Время подачи упора под хлыст равно (рис. 5)
t-'~ .
v
При расположении хлыста по оси z ортонормированного базиса L 3 (рис. 5) переходная матрица 5×5 надвигания хлыста поперечным транспортером запишется
В В л (и уп ,t). (16)
При раскряжевке на слешерных линиях проявляется нежелательное явление, которое [3] называют «бичём» слешерных линий – заклинивание пильных дисков. Процесс заклинивания можно описать в виде перемещений.
Линии СТИ-1, СТИ-2, СТИ-3, СЛ-4, Раума-Репола
В = В л (I,- D-B„ (i,^ (17)
где - lr - реверс транспортера на расстояние l ^
-
Ц - надвигание транспортера на пильные диски.
При этом необходимо учесть время t3 на запуск остановившегося пильного диска.
Линия ЛО-105:
Заклинивание учтем через опускание и подъем пильного диска (18)
В = Вла-ы-Вл,а^ , (18)
где 1г - расстояние перемещения пильного диска при выводе из пропила. Знак минус означает, что мы имеем дело с противоположенными матрицами, перемножение которых не повлияет на координаты хлыста.
Так же, как и для линий СТИ-1, СТИ-2, ЛО-105 и др., необходимо учесть затраты времени на разгон остановившегося в процессе заклинивания пильного диска.
Перемещение хлыста транспортером надвигания учтется технологической матрицей с учетом времени перемещения упором (19) и с учетом угла наклона стола слешера (20)
ВвВп (1,1 уп ,t) . (19)
С учетом угла подъема слешерного стола
ВвВп (i,l уП ,1)-В вр (к,ф,0)-ВП (j,h,0). (20)
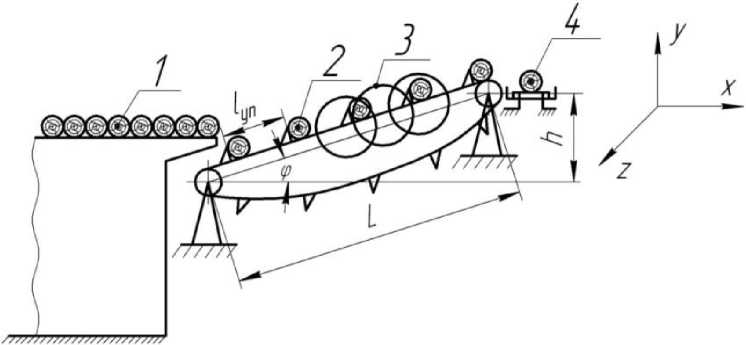
Рис. 5. Схема слешера: 1 – щеть хлыстов; 2 – хлыст, надвигаемый на вращающиеся круглые пилы; 3 – постав круглых пил; 4 – сортимент, полученный при раскряжевке; L – длина слешерного стола; V – скорость надвигания хлыстов на круглые пилы, φ – угол подъема слешерного стола; h – величина увеличения высоты лесонакопителей
Таким образом, из рисунка 5 и записи процесса заполнения упора хлыстами (17), (18) и (19) время раскряжевки хлыста и время выдачи сортимента определяются расстоянием между упорами l уп и скоростью надвигания V .
Выводы
-
1. Структурный анализ показал, что применение переходных ортогональных матриц позволяет определять основные функциональные возможности различных механизмов, входящих в поточные линии.
-
2. При помощи переходных ортогональных матриц возможно описание реверсирования механизмов, а также перемещений, не влияющих на координаты предмета труда.
-
3. Переходные ортогональные матрицы позволяют описывать перемещения по сложной (криволинейной) траектории, при этом возможна замена траектории изменением координат предмета труда, что упрощает формализацию предмета труда.
