Тарировка многокомпонентного динамометра, выполненного на основе механизма с параллельной кинематикой

Автор: Петрова Лина Николаевна, Смирнов Владимир Алексеевич, Федоров Виктор Борисович
Рубрика: Контроль и испытания
Статья в выпуске: 2 т.13, 2013 года.
Бесплатный доступ
Представлена математическая модель динамометра, предназначенного для определения шести компонент силового воздействия и выполненного на основе механизма с параллельной кинематикой. Описана конструкция приспособления, позволяющего выполнить тарировку этого динамометра.
Многокомпонентный динамометр, механизм с параллельной кинематикой, тарировка динамометра
Короткий адрес: https://sciup.org/147151625
IDR: 147151625 | УДК: 621.865.8
Calibration of the multicomponent dynamometer with parallel kinematic structure
A mathematical model of the multicomponent dynamometer for measuring of the six constituent of force with parallel kinematic structure is offered. The design of device for its calibration is described.
Текст научной статьи Тарировка многокомпонентного динамометра, выполненного на основе механизма с параллельной кинематикой
При решении ряда технических задач может возникнуть необходимость измерения силовых факторов – сил и моментов относительно заданных осей координат. Такая проблема возникает, например, при анализе взаимодействия режущего инструмента и заготовки в процессе фрезерования. Для определения сил (сил резания) в этом случае используются многокомпонентные динамометры – измерительные приборы, способные регистрировать силы, направленные вдоль некоторых заданных осей, и пересчитывать их в требуемые силовые факторы – силы и моменты сил.
Конструкция типичного представителя многокомпонентного динамометра – прибора 9257B фирмы Kistler (Швейцария) и описание силоизмерительной установки на его основе представлены в [1]. С помощью этого прибора возможно определение трех ортогональных составляющих силы, сонаправленных осям связанной с динамометром системы координат, а также определение моментов сил, действующих вокруг этих осей. Таким образом, измерительная система, построенная с использованием этого динамометра, позволяет определить шесть силовых факторов, полностью оправдывая термин «многокомпонентность».
Основная область использования динамометра 9257B и аналогичных ему приборов – измерение сил, возникающих при обработке материалов методами фрезерования, точения, шлифования и т. п. Однако он может найти применение и в иных областях, связанных с необходимостью измерения силовых факторов, например, при аэродинамических испытаниях моделей летательных аппаратов.
В Южно-Уральском государственном университете ведутся работы по созданию стенда для наземной отработки летательных аппаратов с переменными массо-геометрическими характеристиками. Концепция стенда предполагает размещение летательного аппарата на подвижной платформе, устанавливаемой, например, на легковой автомобиль. При движении автомобиля скорость набегающего потока будет соответствовать наиболее ответственным режимам функционирования летательного аппарата – режимам взлета и посадки.
В рамках наземной отработки летательного аппарата необходимо осуществлять контроль действующих на него силовых факторов. С этой целью предполагается использовать многокомпонентный датчик сил – многокомпонентный динамометр, размещаемый между летательным аппаратом и платформой. При этом динамометр должен обладать необходимым диапазоном и точностью измерений, малой массой (не более 1,5 кг), относительно невысокой стоимостью, возможностью эксплуатации в полевых условиях.
Анализ возможности использования для указанных целей динамометра 9257B выявил следующие негативные моменты:
-
– динамометр имеет массу 7,6 кг, что сопоставимо с массой летательного аппарата (6 кг) и существенно превышает принятые в рамках проекта ограничения;
-
– стоимость динамометра превышает 1 млн рублей;
-
– исполнение динамометра по классу защиты IP67 позволяет использовать его в полевых условиях, однако для его работы требуется многоканальный усилитель 5070А (стоимость – более
700 тыс. рублей), исполнение которого по классу защиты IP40 и необходимость питания от сети 220 В, 50 Гц существенно усложняют организацию измерений в полевых условиях.
Таким образом, возникла потребность создания многокомпонентного динамометра, который бы отвечал перечисленным выше требованиям.
На кафедре автоматизации механосборочного производства имеется положительный опыт создания силоизмерительных систем на основе механизмов с параллельной кинематикой, имеющих шесть степеней свободы – гексаподов [2, 3].
Кинематическая схема механизма-гекса-
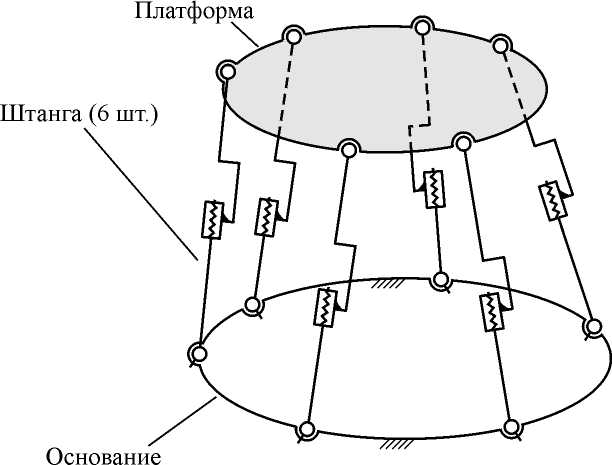
Рис. 1. Кинематическая схема механизма-гексапода
пода показана на рис. 1. Назначение такого механизма – осуществлять перемещение его платформы по шести координатам за счет изменения длин шести штанг. Пространственные механизмы с параллельной кинематикой отличаются высокой удельной жесткостью; в штангах гексапода возникают только усилия растяжения-сжатия, что позволяет упростить конструкцию многокомпонентного динамометра.
Если при использовании гексапода в качестве динамометра не возникает необходимость в изменении пространственного положения его платформы, то целесообразно исключить из конструкции поступательные кинематические пары, т. е. использовать штанги постоянной длины. В качестве штанг выступают силоизмерительные элементы, способные регистри- ровать растягивающие и сжимающие усилия – тензометрические датчики; соединение этих штанг-датчиков с основанием и с платформой осуществляется с использованием однотипных сферических шарниров. Трехмерная модель динамометра показана на рис. 2.
Использование для крепления штанг-датчиков только сферических подшипников позволяет штангам совершать вращения вокруг своих продольных осей, однако на функционировании всей конструкции как многокомпонентного динамометра это не сказывается.
На рис. 3 показана расчетная схема многокомпонентного динамометра; задачей, решаемой при помощи этого прибора, является определение двух векторных величин – вектора силы P и вектора момента M , приложенных к платформе в некоторой точке (точке приведения), по ре-^*
зультатам измерений усилий Pi , осуществляемых с помощью штанг-датчиков.
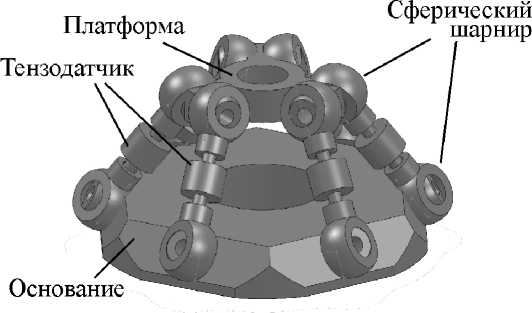
Рис. 2. Трехмерная модель многокомпонентного динамометра
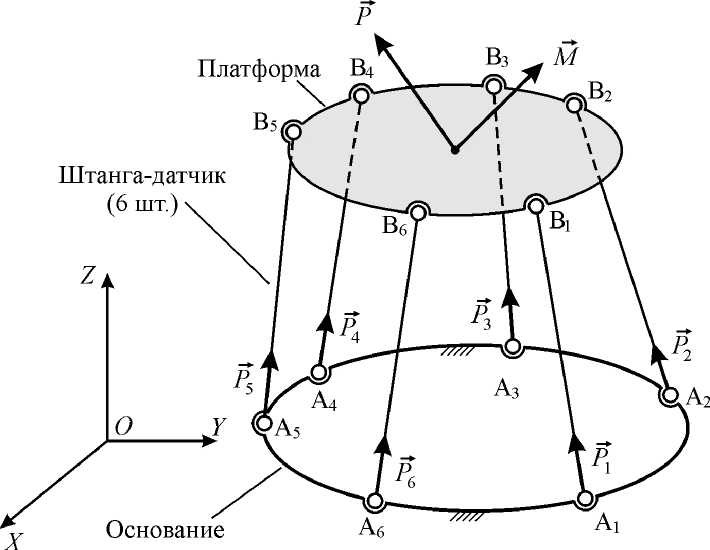
Рис. 3. Схема многокомпонентного динамометра
Уравнения, связывающие подлежащие определению величины P и M с усилиями в штангах, имеют следующий вид:
a ll P l + a 12 P 2 a 21 P l + a 22 P 2 a 31 P l + a 32 P 2
+ anP 3 + a i4 P 4 + a i5 P 5 + a^P 6 — - P x ;
+ a 23 P 3 + a 24 P 4 + a 25 P 5 + a 26 P 6 — - P Y ;
+ a 33 P 3 + a 34 P 4 + a 35 P + a 36 P 6 — - P ,
a 41 P i + a 42 P 2 + a 43 P 3 + a 44 P + a 45 P 5 + a 46 P 6 - M x ,
*
a 51 P l + a 52 P 2 + a 53 P 3 + a 54 P 4 + a 55 P 5 + a 56 P 6 — - M Y ;
*
a 61 P l + a 62 P 2 + a 63 P 3 + a 64 P 4 + a 65 P 5 + a 66 P 6 — - M Z ,
——
——
где проекции M * включают составляющие, определяемые как моментом M , так и силой P .
Система (1) представляет собой математическую модель динамометра. Правые части в этих уравнениях представляют собой проекции на оси некоторой связанной с основанием динамо-
—
—
метра системы координат OXYZ составляющих внешнего воздействия – силы P и момента M ; коэффициенты aij определяются следующими выражениями:
_ xB, - xA,.
'1 J— / 2 22
-
2 ( x A"x Bj) + ( y A" y B J ) + ( z A J - z B J )
, __________________zBJ "z A J.
■ 3 J / 2 22 л (Хд —Xr ) +(Уд —Ун ) +(Za —Zr ) A B A B A B
_ z J x B , - x A) - x J z B , - z A)
-
У b - У A ,
-
12 j - 1 2 2 2 ;
2 ( x A j - x B j ) + ( y A j - y B j ) + ( z A , - z B j )
_ У A j ( z B j - z A j ) - z A j ( У B j - У A j )
-
4 J = / 2 22^
2( x A ,-x B , ) + ( У A , - У B , ) + z A , - z B , )
, _ x A,( У в , - У A,) - У A,( x в , - x A,)
Для вычисления коэффициентов ai необходимо знать координаты ( x A , y A , z A ) и
( x B , y B , z B ) центров сферических шарниров в системе координат OXYZ . Определение этих координат по трехмерной модели многокомпонентного динамометра труда не представляет, однако полученные таким образом значения могут существенно отличаться от координат центров сферических шарниров в реально изготовленном динамометре, что негативно скажется на точности определения величин P и M с использованием модели (1).
Представляется целесообразным определять значения 36 коэффициентов ai , входящих в систему (1), экспериментально, т. е. решать задачу идентификации параметров модели динамометра.
Рассмотрим первое уравнение системы (1). В него входят шесть коэффициентов a1 , связы вающие усилия в штангах-датчиках с проекцией силы P на ось OX . Для определения этих коэффициентов необходимо провести шесть экспериментов: в каждом из экспериментов формируется известное значение проекции PX и производятся измерения сил P . Таким образом, можно записать следующую систему уравнений:
[ P 1 < 1 > a ll p<2> an P1<3> all P 1 < 4 > a ll P 1 < 5 > a n _ P ! < 6 > an
-
<1> <1> <1> <1> <1><
-
+ P2 a12 + P3 a13 + P4 a14 + P5 a15 + P6 a16 — PX;
-
-I- P<2>л -I- P<2>л -I- P<2>л -I- P<2>л -I- P<2>л — —P<2>■
-
+ P2 a12 + P3 a13 + P4 a14 + P5 a15 + P6 a16 — PX;
-
<3> <3> <3> <3> <3><
-
+ P2 a12 + P3 a13 + P4 a14 + P5 a15 + P6 a16 — PX;
-
< 4> <4> <4> <4> <4><
-
+ P2 a12 + P3 a13 + P4 a14 + P5 a15 + P6 a16 — PX;
. p<5>n . p<5>л , p<5> , p < 5 > , p < 5 > __p<5>.
-
+ P2 a12 + P3 a13 + P4 a14 + P5 a15 + PP a16 — PX;
<6> <6> <6> <6> <6><
-
+ P2 a12 + P3 a13 + P4 a14 + P5 a15 + P6 a16 — PX,
где верхний индекс обозначает номер эксперимента. Решение системы (2) позволит определить все шесть коэффициентов a 1 .
Если в ходе шести проведенных экспериментов формировались известные значения для всех проекций силовых факторов, присутствующих в правых частях уравнений (1), то с использованием пяти систем уравнений, аналогичных (2), можно определить остальные 30 коэффициентов aij .
Проведение экспериментов можно упростить, если осуществлять нагружение платформы такими внешними силами, которые в точке C приводятся только к вектору P < k > . Направление силы P может описываться в системе координат через два угла а и в , рис. 4. На этом рисунке точка
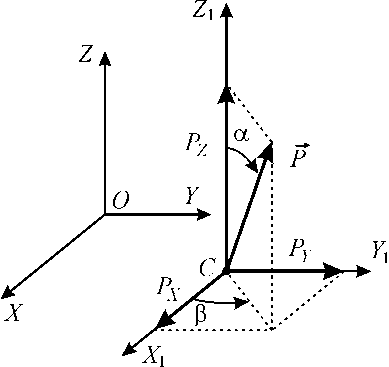
Рис. 4. Задание направления силы P
C – точка платформы, к которой приложена сила P , оси системы координат CX 1 Y 1 Z 1 сонаправлены соответствующим осям системы координат OXYZ .
Тогда проекции силовых факторов можно определить из следующих зависимостей:
P X = P sin а cos в ; P Y = P sin а sin в ; P Z = P cos а ;
**
M X = PZ y C - P Y z C ; M Y
*
= PXzC - PZxC ; MZ = PYxC - PXyC , где xC , yC , zC – координаты точки C в системе координат OXYZ .
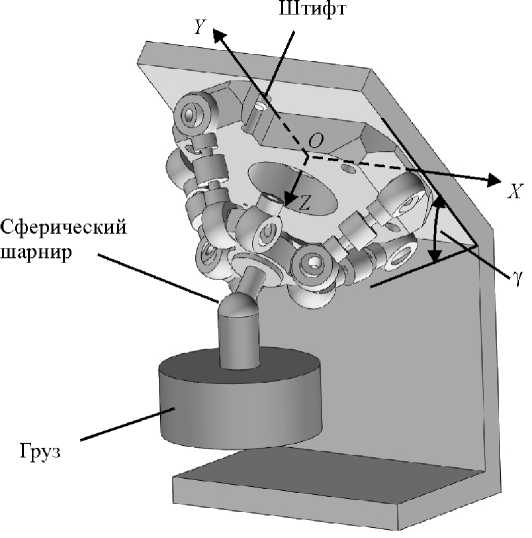
Для экспериментального определения коэффициентов aij разработано приспособление, модель которого показана на рис. 5. Приспособление имеет неподвижную плоскость, наклоненную к горизонту под известным углом у. Динамометр устанавливается на эту плос- кость. Положение динамометра на плоскости определяется системой двух штифтов, один из которых показан на рис. 5, а.
а)
Рис. 5. Приспособление для нагружения динамометра при экспериментальном определении коэффициентов: а – твердотельная модель; б – схема задания системы координат OXYZ
б)
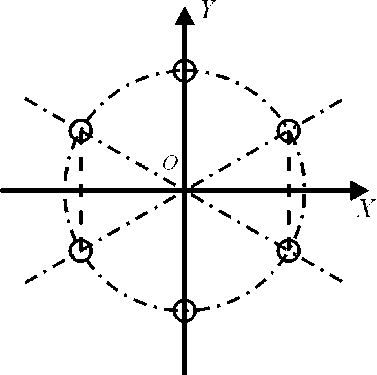
Для базирования по штифтам на основании динамометра выполнены шесть отверстий, лежащих на окружности с шагом 60 градусов (см. рис. 5, б). Отверстия выполнены с высокой точностью, что позволяет использовать их для физического задания связанной с основанием динамометра системы координат OXYZ : ось OY проходит через центры двух отверстий, ось OX проходит через центры двух отрезков, попарно соединяющих центры четырех оставшихся отверстий (см. рис. 5, б), плоскость OXY совпадает с плоскостью контакта приспособления и основания динамометра, ось OZ дополняет тройку осей до правой.
Через сферический шарнир на платформу динамометра будет воздействовать сила веса груза, которая при экспериментах будет являться внешней силой P . Эта сила направлена вертикально вниз; точкой приложения является центр сферического шарнира. Координаты центра шарнира в системе координат OXYZ полагаются известными.
Как отмечено выше, для определения коэффициентов aij необходимо провести шесть экспериментов. Примем, что показанное на рис. 5, а положение динамометра относительно приспособления соответствует первому эксперименту. Если ось OX лежит в горизонтальной плоскости (плоскости, для которой вектор силы P является нормалью), то а < 1 > = у и р < 1 > = 90 ° .
Для второго эксперимента необходимо повернуть динамометр относительно приспособления на 60 градусов вокруг оси OZ , для определенности против часовой стрелки. В этом случае а < 2 > = у и р < 2 > = 150 ° . Остальные эксперименты предполагают дальнейшие последовательные повороты динамометра на 60 градусов; для этих экспериментов р < 3 > = 210 ° , р < 4 > = 270 ° , р < 5 > = 330 ° , р < 6 > = 390 ° . Углы а < k > для всех экспериментов одинаковы и равны у .
В ходе каждого эксперимента должны регистрироваться силы в штангах-датчиках. По результатам экспериментов с использованием зависимостей (2) производится расчет коэффициен- тов aij .
Серия из шести экспериментов является минимально необходимой для определения 36 коэффициентов aij , однако из-за неизбежных погрешностей измерений результаты расчетов могут иметь значительные отклонения от действительных значений коэффициентов. Повысить точность решения задачи идентификации модели (1) можно путем увеличения количества экспериментов с последующим использованием известных методов обработки результатов.
Заключение. Разработанный многокомпонентный динамометр позволяет решать задачу определения силовых факторов, действующих на летательный аппарат в ходе его наземных испытаний. Для идентификации параметров модели динамометра может использоваться описанное в статье приспособление. Точность идентификации может быть повышена за счет увеличения числа экспериментов и использования статистических методов обработки их результатов.
Список литературы Тарировка многокомпонентного динамометра, выполненного на основе механизма с параллельной кинематикой
- Утенков, В.М. Возможности использования динамометра Kistler для испытания металлорежущих станков/В.М. Утенков, П.А. Быков//Инженерный вестник. Электронный научнотехнический журнал. -2012. -№10. -http://engbul.bmstu.ru/doc/492011.html (дата обращения 01.09.2013).
- Smirnov, V. Energy efficient trajectories of industrial machine tools with parallel kinematics/V. Smirnov, V. Plyusnin, G. Mirzaeva//ICIT 2013 -2013 IEEE International Conference on Industrial Technology (Cape Town, South Africa, 25-28 February, 2013). -P. 1267-1272.
- Смирнов, В.А. Кинетостатическое моделирование энергоэффективного управления оборудованием с параллельной кинематикой/В.А. Смирнов//Вестник ЮУрГУ. Серия «Машиностроение». -2010. -Вып. 16. -№ 29 (205). -С. 65-70.
