Технологии обеспечения безопасности инструментальных систем посадки самолетов

Автор: Смирнов Юрий Сергеевич, Ларионов Владимир Александрович, Юрасова Екатерина Валерьевна
Статья в выпуске: 3 т.14, 2014 года.
Бесплатный доступ
Работа носит постановочный характер, предусматривающий рассмотрение технологий обеспечения безопасности режима посадки - сложного и рискованного этапа полета, который должен удовлетворить пассажиров и сохранить технику. Международная организация гражданской авиации (ICAO) определила эксплуатационные категории, характеризуемые высотой принятия решения и дальностью видимости на взлетно-посадочной полосе (ВПП). В реальности даже самая совершенная техника иногда подводит, в эксплуатации все еще находятся воздушные суда устаревших конструкций, а оборудование российских аэропортов продолжает желать лучшего.
Международная организация гражданской авиации, системы инструментальной посадки, автоматизированная система траекторных измерений посадки, всемирная система ориентации, спутниковая система дифференциальной коррекции, модальное, адаптивное и робастное управление, параметрические и сигнальные неопределенности
Короткий адрес: https://sciup.org/147154981
IDR: 147154981 | УДК: 629.7.051.52
Security technology of instrument landing systems
The article carries raising character, providing security for the complex and risky phase of the flight, which must satisfy the passengers and save the equipment. The International Civil Aviation Organization (ICAO) has identified the operational category, characterized by decision altitude (DA) and the range of visibility on the runway. Unfortunately, in reality, even the most advanced technology sometimes breaks down, in operation are obsolete aircraft designs, and Russian airports operate on outdated equipment.
Текст научной статьи Технологии обеспечения безопасности инструментальных систем посадки самолетов
Статистика ICAO свидетельствует, что доля авиакатастроф по вине экипажа очень высока, так как в экстремальной ситуации экипажу очень трудно объективно оценить происходящие на борту и за бортом процессы и принять правильное решение для спасения самолета в режиме реального времени. В некоторых случаях экипаж мог бы спасти самолет, если бы имел полное и четкое представление о происходящих ситуациях [2].
Снижению влияния «человеческого фактора» и обеспечению безопасности посадки способствует оснащение аэропортов и самолетов новыми инструментальными системами посадки (ИСП), эффективность которых постоянно растет [3]. Это, в свою очередь, повышает метрологические и динамические требования к системе сертификации, контроля и калибровки оборудования, задействованного в процессе посадки.
Сертификация оборудования предусматривает подтверждение того, что система посадки, состоящая из бортового и наземного оборудования, обеспечивает выполнение требований выхода параметров приземления за предельно допустимые значения с чрезвычайно малой вероятностью P доп = 10–6…10–8 [4]. Это ведет к необходимости создания прецизионной технологии сертификации, калибровки и контроля, осуществляющей измерения в динамике с высокой точностью [5].
Варианты контроля ИСП
Для цели контроля безопасности инструментальных систем посадки самолетов ранее использовались наземные комплексы с летающими лабораториями.
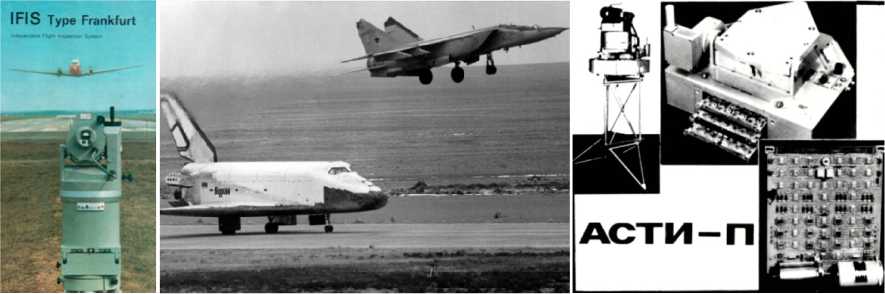
На рис. 1, а показана Independent Flight Inspection System (IFIS) Type Frankfurt при проведении контрольных полетов.
В СССР была создана «Автоматизированная система траекторных измерений посадки (АСТИ-П)», которая совместно с летающими лабораториями на базе самолетов ТУ-134 и ТУ-154 обеспечила контроль и калибровку автоматической системы посадки МКК «БУРАН» 15.11.1988 [6] (рис. 1, б). Высокие метрологические и динамические показатели АСТИ-П (рис. 1, в) в значительной мере определялись точностью и быстродействием четырех самоорганизующихся электромехатронных преобразователей (ЭМТП) двухкоординатных систем стабилизации и слежения [7].
Уместно отметить, что научная школа Г.С. Черноруцкого разработала уникальный стенд для испытаний бортовых систем МКК «БУРАН» [8]. Стенд по техническим показателям превзошел зарубежный аналог и имел метрологические показатели, сопоставимые с теми, которые требуются для контроля ИСП самолета [1].
а)
б)
в)
Рис. 1
Цель представленного иссл едования состоит в обосновании целесообра зности использования для решения поставленной зад ачи отечественных научных и технических до стижений [4–10].
Однако такой подход расх одится с мнением о том, что единственным оптимальным вариа н том, на базе которого могут бы ть реализованы системы навигации и посад ки, являются спутн иковые технологии [2]. В настоя щее время рекомендуется применение всеми рной системы орие нтации Global Position System ( GPS ). Анализ реальных возможностей GPS свидетельствует о том, что по своим метрологическим показателям она не в состоянии обеспечит ь сертификацию, ко н троль и калибровку наземного комплекса ИСП [1].
На точность определения местоположени я влияет расположение доступных космических аппаратов (КА), атмосферные условия и другие факторы, приведенные в табл. 1.
Таблица 1
Источники погрешности, влияющие на точность определения положения систем спутниковой навигации
|
Источники погрешности |
Среднеквадратичное значение погрешности, м |
|
Задержка в бортовой аппаратуре |
1,0 |
|
Погрешности космического сегмента |
1,0 |
|
Ошибки сегмента пользователя |
1,0 |
|
Погрешности наземного сегмента |
1,8 |
|
Неопределенность пространственного положения спутника |
2,0 |
|
Многолучевость |
2,4 |
|
Шумовая погрешность приемника |
2,9 |
|
Тропосферная задержка |
3,9 |
|
Ионосферная задержка |
4,5 |
|
Нестабильность работы генератора |
6,5 |
|
Неточность эфемерид |
8,2 |
|
Полная погрешность определения местоположения составляет 13,1 м |
|
Известно, что современные GPS-приемники в горизонтальной плоскости имеют погрешность на уровне 6…8 м при хорошей наблюдаемости КА и использовании алгорит мов коррекции. Спу т никовая система дифференциальной коррекции Space Based Augmentation System (SBAS) обеспе чивает увеличение точности си гнала за счет использования спутниковой тр ансляции сообщений. Подобные системы включают н есколько станций, координаты которых изве стны с высокой степ е нью точности. Теоретически дл я определения координат достаточно 3 КА в з о не видимости.
Однако использование GPS, наряду с несомненными достоинствами имеет один серьезный недостаток: по разным причинам она может отключаться. Идентификация траектории полета самолета на время отключения на основе показаний приборов автономной навигации дает неприемлемо большую погрешность [2]. При отключении GPS приходится пользоваться услугами отече- ственной спутниковой системы ГЛОНАСС. Пока точность определения координат отечественной спутниковой системы несколько отстает от аналогичных показателей для GPS. Согласно данным на 18.09.12 г. ошибки навигационных определений ГЛОНАСС (при Рдов = 0,95) по долготе и широте составляли 3…6 м при использовании, в среднем, 7…8 КА (в зависимости от точки приема). В это же время ошибки GPS составляли 2…4 м при использовании, в среднем, 6…11 КА (в зависимости от точки приема). Статистика сопоставительных тестов приведена в табл. 2.
Таблица 2
Сравнительные результаты испытаний по определению местоположения КА при использовании для навигации GPS и ГЛОНАСС
|
Статистика тестов |
GPS |
ГЛОНАСС |
|
Всего измерений, шт. |
658,00 |
592,00 |
|
Ошибок навигации (выбросов), шт. |
13,00 |
28,00 |
|
Максимальная ошибка, м |
16,00 |
38,00 |
|
Средняя величина ошибки, м |
5,57 |
7,32 |
|
Среднее количество видимых спутников, шт. |
8,71 |
7,76 |
|
Количество потерь навигации, шт. |
15,00 |
18,00 |
Следует отметить, что использование ГЛОНАСС и корректирующей информации системы дифференциальной коррекции и мониторинга (СДКМ) снижает погрешность определения навигационных данных в 4…6 раз (табл. 3).
Таблица 3
Среднеквадратические погрешности определения координат потребителя при использовании ГЛОНАСС и коррекции СДКМ
|
Режим |
Погрешность определения плановых координат, м |
Погрешность определения высоты, м |
Погрешность определения трехмерных координат, м |
|
ГЛОНАСС |
2,9 |
3,4 |
4,3 |
|
ГЛОНАСС/СДКМ |
0,50 |
0,79 |
0,93 |
Курсовой (КРМ) и глиссадный (ГРМ) радиомаяки должны обеспечивать посадку со следующей точностью: предел погрешности смещения линии курса относительно осевой линии ВПП для КРМ категории III ILS равен 3 м в опорной точке ИСП, предел погрешности отклонения угла глиссады Θ от номинального значения составляет 0,04 Θ для глиссад ИСП категории III [1]. Аппаратура для контроля точности работы радиомаяков ИСП должна быть в три раза точнее, следовательно, системы GPS и ГЛОНАСС не позволяют обеспечить корректную метрологическую оценку точности работы радиомаяков.
Вышеизложенное подтверждает необходимость создания наземной мехатронной оптикоэлектронной системы (МОЭС), обеспечивающей траекторные измерения движения самолета, при инструментальной посадке с погрешностями, удовлетворяющими требованиям [1].
Постановка задачи
Задача МОЭС состоит в наведении оси оптико-электронного сенсора на маркер, установленный на фюзеляже самолета, при его заходе на посадку за 5000 м до торца ВПП посредством визуализации маркера и перевода комплекса в режим сопровождения до полной остановки. При этом МОЭС производит одновременно с визуализацией траекторные измерения движения самолета относительно поверхности и оси ВПП.
Полученная информация о координатах самолета передается по кабелю или эфиру в цифровом формате на монитор оператора посадки, который при превышении отклонений от нормы или отсутствия выпущенного шасси может успеть предотвратить аварию, дав команду ухода на второй круг.
При неисправности выпуска шасси, самолет должен до второго захода на посадку выработать излишки топлива и совершить аварийную посадку на полосу с противопожарными меро- приятиями. В истории авиации были случаи, когда экипаж отключал необходимую сигнализацию и забывал выпустить шасси. В этом случае МОЭС может предотвратить аварийную посадку через оператора, который имеет связь с экипажем. Известны случаи аварийных посадок при неисправном шасси, когда удавалось избежать жертв.
Электромехатронный стационарный вариант МОЭС
Переход в электромехатронике к безредукторным вариантам ЭМПТ с единым информационным обеспечением [9] позволяет реализовать прецизионную МОЭС, обеспечивающую метрологические и динамические показатели, необходимые для решения стоящей задачи. Применение для визуализации оптоэлектроники на основе приборов с зарядовой связью ведет к дальнейшему повышению эффективности системы визуализации и траекторных измерений [10]. Имеющийся опыт построения прецизионных ЭМТП с большим сроком безрегламентного обслуживания [7] позволяет расширить функциональные возможности МОЭС наведения и сопровождения, которая может размещаться стационарно на крыше КРМ ИСП [3].
При минимаксном подходе к проектированию современной МОЭС в качестве базового модуля целесообразно использовать систему внешних траекторных измерений (СВТИ), которая после модернизации совместно с летающей лабораторией в состоянии обеспечить траекторный контроль ИСП.
Модернизация СВТИ предусматривает расширение функциональных возможностей МОЭС для ее сертификации, калибровки и контроля посредством астрокоррекции. Это позволяет отказаться от использования спутниковых систем навигации и перейти к использованию в качестве ориентиров звезды, координаты которых известны с высокой степенью точности и занесены в каталоги [14]. Расположение ориентиров подчиняется законам небесной механики и не зависит от межгосударственных отношений.
Важно отметить, что модернизация не затрагивает электромеханическую компоненту СВТИ. Повышение эффективности МОЭС достигается за счет совершенствования структурного, алгоритмического и информационного обеспечений процесса сопровождения самолета, формируемого микроэлектронной компонентой МОЭС. При этом используется принцип единого информационного обеспечения, позволяющий повысить уровень траекторных измерений за счет дополнительного формирования значений составляющих изменения скорости и ускорения перемещения от одного первичного сенсора [9].
Требования к динамике сопровождения самолета
Особое внимание при проектировании МОЭС потребует достижение высоких динамических показателей ЭМТП, обеспечивающих слежение за самолетом, представляющим сложный, с этой точки зрения, объект. Данные летных испытаний показывают [11], что «при переходе от линии планирования до точки приземления лётчик изменяет скорость снижения по экспоненциальному закону». В связи с этим в работе [12] подчеркивается, что «в случае автоматической посадки гражданских самолетов можно считать траекторию выравнивания экспонентой».
В [4] рассмотрены проблемы, возникающие при составлении и исследовании математической модели процесса посадки на этапе приземления и пробега. Показано, что для стохастической нелинейной системы, описывающей процесс посадки, предпочтительным методом оценки вероятностных характеристик является метод статистических испытаний. Вследствие простоты использования, такой метод широко применяется в инженерной практике. Наиболее ценным результатом такого подхода является рекомендация о том, что для оценки столь малых вероятностей статистическое моделирование в приемлемом объеме можно провести, если его выполнить по схеме существенной выборки. Сокращение объема достигается тем, что при моделировании имитируется действие лишь тех возмущений, которые относятся к области резонансных частот исследуемой системы. Тем самым осуществляется переход от оценки редких случайных событий к оценке событий, число повторений которых относительно велико.
Предлагаемый вариант системы позволяет получить достаточный объем данных статистического моделирования проведением необходимого числа посадок сертифицированной летающей лаборатории. Формирование в процессе сопровождения самолета помимо угловых координат цифровых эквивалентов скорости их изменения повысит достоверность идентификации матема- тической модели посадочного комплекса при статистических испытаниях [4]. Накопленная при этом информация о динамических особенностях бортов и их пилотов может в дальнейшем использоваться для совершенствования алгоритмов посадки на аэродром, оборудованный стационарной МОЭС.
Оценка показателей предлагаемых технологий повышения безопасности ИСП самолетов посредством МОЭС может быть осуществлена путем сопоставления с полетной информацией, записанной в бортовом магнитном накопителе («черном ящике»). Это стало возможно благодаря комплексированному методу измерения [2], увеличивающему точность идентификации траектории полета.
Из требований к динамике МОЭС сопровождения самолета при посадке следует, что она должна обладать высокими показателями по точности и быстродействию. В настоящее время для управления такими устройствами наиболее распространено либо модальное управление [13], либо построение многоконтурной системы подчиненного управления [7].
Особый интерес представляет альтернативный вариант управления МОЭС, сопровождающей неопределенный объект (самолет), подверженный действию контролируемых и неконтролируемых возмущений. При этом находят использование адаптивные и робастные алгоритмы управления [10]. Это позволит успешно решить задачу управления прецизионной двухкоординатной безредукторной МОЭС, подверженной действию параметрических и сигнальных неопределенностей.
Для сертификации МОЭС с использованием режима астрокоррекции, разработаны методы системной оптимизации первичной обработки измерительной информации в оптико-электронных системах [15].
Заключение
Вариант построения на основе модернизации СВТИ позволяет:
-
1) внедрить телевизионную технологию визуализации, повышающую безопасность использования ИСП самолетов;
-
2) ввести в эксплуатационную документацию регламент по ее сертификации, калибровке и контролю на основе астрокоррекции;
-
3) полностью устранить зависимость этого сектора авионики от услуг системы GPS, не обеспечивающей метрологию контроля ИСП;
-
4) использовать в динамических измерениях траектории посадки методы теории автоматического управления [5] и мехатроники [7];
-
5) повысить путем модернизации микроэлектронной компоненты функциональные, метрологические, динамические показатели МОЭС;
-
6) снизить трудозатраты по изготовлению МОЭС за счет использования технологически отработанного процесса изготовления СВТИ;
-
7) расширить функциональные возможности телевизионного сенсора для визуализации обстановки на ВПП;
-
8) применить при управлении перемещением телевизионного сенсора самоорганизующуюся систему сопровождения [7];
-
9) обеспечить самостоятельное изменение структуры системы сопровождения путем анализа значений составляющих перемещения;
-
10) оперативно оценить вероятность возникновения аварийной ситуации анализом текущих значений составляющих перемещения;
-
11) повысить достоверность идентификации динамической модели комплекса ИСП при статистических испытаниях [4];
-
12) снизить среднее квадратическое отклонение измерений угловых координат с использованием МОЭС при одновременном повышении ее быстродействия;
-
13) создать современную лабораторную базу в НИУ «ЮУрГУ», организовать повышение квалификации операторов посадки.
Список литературы Технологии обеспечения безопасности инструментальных систем посадки самолетов
- Приложение 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Т. 1: Радионавигационные средства. -Монреаль (Канада): ИКАО, 2006. -606 с.
- Алгулиев, Р.М. Комплексирование измерений для идентификации траектории полета летательного аппарата/Р.М. Алгулиев, Г.Г. Оруджов, Э.Н. Сабзиев//МАУ. -2012. -№ 2. -С. 57-60.
- Войтович, Н.И. Моделирование работы двухчастотной инструментальной системы посадки самолетов/Н.И. Войтович, Б.В, Жданов, А.В. Зотов//Вестник ЮУрГУ Серия «Компьютерные технологии, управление, радиоэлектроника». -2013. -Т. 13, № 4. -С. 55-68.
- Кербер, О.Б. Особенности автоматизации посадки самолетов гражданской авиации по категории III ICAO/О.Б. Кербер, В.Н. Мазур, К.Т. Цатурян//МАУ. -2010. -№ 7. -С. 76-78.
- Шестаков, А.Л. Методы теории автоматического управления в динамических измерениях/А.Л. Шестаков. -Челябинск: Издат. центр ЮУрГУ, 2013 -257 с.
- Громов, Г. «Радиотропа» из космоса/Г. Громов, А. Реутов//Правда. -1988. -6 декабря. -С. 3.
- Смирнов, Ю.С. Электромехатронные преобразователи/Ю.С. Смирнов; под ред. А.Л. Шестакова. -Челябинск: Издат. центр ЮУрГУ, 2013 -361 с.
- Научные школы ЮУрГУ. История развития/под ред. д.т.н., проф. А.Л. Шестакова, д.х.н., чл.-корр. РАН Г.П. Вяткина; ред.-сост. О.В. Антонова. -Челябинск: Изд-во ЮУрГУ, 2008. -600 с.
- Smirnov, Y.S. Common Dateware of Robotics Mechatronic Converters Proc. of the Third ISMCR’93/Y.S. Smirnov. -Italy, Torino, 1993. -As 1. -P. 13-18.
- Арановский, С.В. Робастное управление безредукторным прецизионным электроприводом оси оптического телескопа с компенсацией возмущений/С.В. Арановский, И.Б. Фуртат//МАУ. -№ 9. -2011. -С. 8-13.
- Гуськов, Ю.П. Управление полетом самолетов: Учеб. для авиационных вузов/Ю.П. Гуськов, Г.И. Загайнов. -М.: Машиностроение, 1980. -216 с.
- Котик, М.Г. Динамика взлета и посадки самолетов/М.Г. Котик. -М.: Машиностроение, 1984. -256 с.
- Усынин, Ю.С. Теория автоматического управления: учеб. пособие для вузов/Ю.С. Усынин. -Челябинск: Издат. центр ЮУрГУ, 2010. -176 с.
- Lillestrand, R.L. Automatic celestial guidance, part 2. New challenge to designers ingenuity // R.L. Lillestrand, J.E. Carroll, J.S. Newcomb // Electronics. - 1966. - № 7. - С. 94-106.
- Усачев, Ю.А. Системная оптимизация первичной обработки информации в измерительных оптико-электронных системах/Ю.А. Усачев. -Челябинск: ЮУрГУ, 2000. -301 с.
