Технология оптимального проектирования сложноструктурированных систем с распределёнными параметрами: программные стратегии принятия решений

Автор: Рапопорт Э.Я., Плешивцева Ю.Э.
Журнал: Онтология проектирования @ontology-of-designing
Рубрика: Методы и технологии принятия решений
Статья в выпуске: 2 (24) т.7, 2017 года.
Бесплатный доступ
В статье приводятся постановки и предлагаемая технология решения широкого круга задач совместной оптимизации по комплексным критериям эффективности проектных разработок и режимов функционирования сложноструктурированных бесконечномерных детерминированных и не полностью определённых систем с распределёнными параметрами применительно к их описанию операторными уравнениями достаточно общего вида с соответствующими начальными и краевыми условиями. В качестве базовой рассматривается детерминированная задача оптимального проектирования программных управлений режимами функционирования распределённой системы с полным объёмом информации о характеристиках объекта. Предлагаемый метод её решения последовательно распространяется на задачи оптимизации проектных разработок в условиях априори фиксируемых внешних воздействий на объект; на комплексную проблему совместной оптимизации и далее на типичные ситуации оптимального проектирования распределённой системы в условиях интервальной неопределённости её параметрических характеристик и внешних возмущений. Развиваемый подход использует предварительную процедуру параметризации искомых решений, опирающуюся на известные аналитические условия оптимальности; последующую операцию точной редукции к специальным задачам математического программирования; альтернансные свойства их экстремалей, подобные известным результатам теории нелинейных чебышёвских приближений, и фундаментальные закономерности предметной области. Приводится представляющий самостоятельный интерес пример применения полученных результатов общего характера к задаче оптимального проектирования промышленного объекта технологической теплофизики производственного назначения. Предлагаемая интерпретация проблемы оптимального проектирования систем с распределёнными параметрами в виде комплексной задачи совместного поиска соответствующих компонентов векторных пространственно-временных управляющих воздействий и обобщенная на достаточно широкий круг подобных задач технология разработки на этой основе программных стратегий принятия решений являются новыми.
Система с распределёнными параметрами, оптимальное проектирование, полубесконечная оптимизация, альтернансный метод
Короткий адрес: https://sciup.org/170178750
IDR: 170178750 | УДК: 62-40 | DOI: 10.18287/2223-9537-2017-7-2-172-190
Technology of optimal designing of complex structured systems with distributed parameters: program strategy of decision making
As a basic problem, the deterministic problem of optimal design is considered to find program control of operational modes for distributed system with well-determined object characteristics. Suggested method for the problem solution is extended to the optimization problems for design solutions under conditions of a priori known external inputs on the object. The method is also applied to the complex problem of the joint optimization and to the typical cases of optimal design of the distributed system under conditions of interval uncertainty of the system’s parametric characteristics and external disturbances. Developed approach uses: the procedure of subsequent parameterization of problems' solutions that is based on well-known analytical conditions of optimality; precise reduction to the special problems of mathematical programming; alternance properties of extremum solutions that are similar to well-known results of theory of non-linear Chebyshev's approximations; and fundamental regularities of the subject domain. The given example of an application of the received results to the optimal design problem solution for industrial object of the technological thermal physics is of a special interest. The formulation of the problem of distributed parameters system design as a complex problem of joint determination of the vector space-time control actions is new. The approach for development of program strategies of the decision making that can be extended to the considered problems class is also new.
Текст научной статьи Технология оптимального проектирования сложноструктурированных систем с распределёнными параметрами: программные стратегии принятия решений
Новые возможности решения актуальной проблемы оптимального проектирования технических систем управления появляются при её трактовке в соответствии с современными требованиями системного подхода в качестве задачи совместного поиска проектных разработок и режимов последующего функционирования объекта, обеспечивающих в совокупно- сти достижение экстремальной величины априори выбираемого комплексного техникоэкономического критерия оптимальности. Трудности решения подобной задачи существенно увеличиваются с возрастанием сложности структуры объекта и порядка динамических моделей его описания, приобретая принципиальный характер применительно к бесконечномерным системам с распределёнными параметрами (СРП) [1-8].
В целом ряде наиболее характерных для прикладных задач ситуаций подобная совокупная проблема поиска проектных решений и способов организации динамических режимов функционирования СРП может быть сведена к поиску понимаемых в обобщённом смысле соответствующих оптимальных векторных управляющих воздействий (УВ). Их составляющие, относящиеся к проектным разработкам, интерпретируются в своих основных аспектах в роли пространственно-распределённых «статических» УВ, а компоненты, определяющие поведение объекта в динамических режимах – как традиционные, изменяющиеся во временной или пространственно-временной области управления.
Известные условия оптимальности во многих случаях позволяют заведомо установить для типовых моделей СРП базовую программную структуру подобных УВ в форме их явной зависимости от временного и пространственного аргументов с точностью до числа и конкретных значений компонентов конечномерного вектора некоторой определённым образом упорядочиваемой совместной последовательности проектных и режимных параметрических характеристик СРП. Тем самым производится параметризация искомых УВ и последующая точная (в рамках исследуемых моделей) редукция к существенно более простым по сравнению с исходными специальным конечномерным задачам математического программирования, решение которых может быть выполнено применительно к их типичным и некоторым новым постановкам с помощью разработанного авторами конструктивного вычислительного алгоритма («альтернансного» метода), использующего фундаментальные закономерности соответствующей предметной области (ПрО) [8-10]. Подобный подход позволяет реализовать соответствующую программную стратегию оптимального проектирования СРП для достаточно широкого круга ответственных производственных объектов.
Представляющая большой самостоятельный интерес традиционная задача поиска оптимальных программных временных или пространственно-временных УВ в условиях наличия необходимого объёма априорной информации о свойствах объекта может рассматриваться в качестве частной модификации общей задачи оптимального проектирования с заранее фиксируемыми значениями параметрических характеристик СРП.
Особое значение в последнем случае приобретает актуальная проблема синтеза оптимальных регуляторов с обратными связями, автоматически реализующими оптимальные режимы функционирования СРП в условиях воздействия на объект внешних и параметрических возмущений (проблема разработки позиционных стратегий управления). Достаточно эффективная процедура её решения в целом ряде типичных ситуаций может быть построена на основе результатов предварительного решения задачи программного управления.
В настоящей статье приводится систематизированное изложение и обобщение предлагаемых авторами конструктивных методов разработки программных стратегий принятия решений для достаточно широкого круга типовых и новых постановок задач оптимального проектирования СРП.
-
1 Математические модели объектов оптимального проектирования систем с распределёнными параметрами
Для широкого класса СРП модель поведения управляемой величины Q в зависимости от времени t и пространственных координат X е V, X = (xi), i = 1, m; 1 < m < 3, в пределах од- носвязной области V с кусочно-гладкой границей S описывается неоднородным скалярным или векторным операторным уравнением
-
(1) Ц [ Q ( X , t , g ( X ) , d ) ] = f . ( X , uv ( X , t ) , w 1 ( X , t )) , X e V , t > 0,
с граничными
-
(2) L 2 [ Q ( X , t , g ( X ) , d ) ] = f 2 ( U s ( X , t ) , w 2 ( X , t )) , X e S , t > 0
и начальными условиями
-
(3) L з [ Q ( X , t , g ( X ) , d ] = f з ( X ) , X e V , t = 0.
Здесь uV ( X , t ), X e V и U S ( X , t ), X e S - зависящие от X и t (пространственновременные) или только от t (сосредоточенные) соответственно внутренние и граничные режимные управляющие воздействия; g(X ), X e V - пространственно распределённые (статические) управляющие воздействия, в роли которых рассматриваются искомые проектные решения СРП; w = ( Q ( X ,0 ) , d , W 1 , w 2 ) - вектор неопределённых факторов, к которым могут относиться начальное состояние объекта Q ( X ,0 ) , неопределённости параметрических характеристик объекта d и внешние возмущающие воздействия w 1 и w 2 ; L 1 , L 2 , L 3 - заданные (в общем случае нелинейные) интегро-дифференциальные операторы; f _ ( • ), f , ( ■ ), f 3О - известные скалярные или векторные функции своих аргументов, удовлетворяющие обычным требованиям по их гладкости, и V - открытая часть области V , не содержащая её границу.
Краевая задача (1)-(3) может быть решена относительно управляемой величины Q ( X , t ) с требуемой точностью известными численными или в частных случаях аналитическими методами.
В типичных условиях ограниченности ресурсов на формирование УВ и интервального характера неопределённых факторов будем далее считать, что допустимые значения УВ стеснены на всём протяжении процесса управления при t e [0, T ] ограничениями
-
(4) U v ( X , t ) e U v ( X , t ); U s ( X , t ) e U s ( X , t ), t e [0, T ], g ( X ) e G ( X )
с известными границами заданных множеств UV , U s , G , а вся информация о векторе w исчерпывается условиями его принадлежности заданному множеству W его компонентов
-
(5) w ( Q ( X ,0 ) , d , w i ( X , t ) , w 2 ( X , t )) e W ( X , t ) , t e [ 0, T ] .
Каждому фиксированному значению it e W в (5) при любом допустимом согласно (4) конкретном наборе управлений UV , Us и g ( X ) отвечает соответствующее пространственновременное распределение Q ( X , t , uV , uS , g , iw) («изолированная» траектория [11]) управляемого состояния СРП. Объединение этих состояний по всем допустимым величинам w e W при одних и тех же УВ образует ансамбль траекторий объекта в рассматриваемых условиях ограниченной неопределённости [11]
-
(6) Q ( X , t , U v , u s , g , T , W ) = U { Q ( X , t , U v , us , g , T , w : w e W , t e [ 0, T ] ) } .
В рамки описания (1)-(6) укладывается ряд наиболее характерных последовательно усложняемых частных ситуаций, на основе которых может быть сформирована технология принятия решений для различных вариантов постановок общей задачи оптимального проектирования СРП.
В качестве типичной базовой модели обычно используется детерминированная модель СРП без учёта неопределённых факторов в (1)-(3) с априори заданным проектным решением объекта и искомыми режимными управлениями uV, us, выделяющими соответствующую изолированную траекторию из ансамбля (6) при заведомо фиксируемых величинах w е W и g е G [1-3, 8]. Подобная модель предусматривает последующее решение частной задачи оптимального проектирования процессов функционирования СРП при полном объёме необходимой информации о характеристиках объекта.
Детерминированная модель СРП (1)-(3) при w = w е W ; u V = ~ V , uS = us может быть использована для поиска оптимальных проектных решений g ( X ) в условиях заранее фиксируемых режимных УВ n V , uS , в частности, применительно к статическим режимам работы СРП при d Q / д t = 0 в (1)-(3).
В более общей ситуации, требующей организации совместного поиска проектных и режимных решений, следует использовать модель (1)-(3) при w = w с искомыми величинами u V , uS и g . Фиксация только составляющих w 1 и w 2 в каждой из указанных частных моделей приводит к описанию объекта в условиях интервальной неопределённости начального состояния и параметрических характеристик объекта и отсутствия неопределённых внешних возмущений при w = ( Q ( X ,0 ) , d , w 1 , w2 ) .
Аналогичным образом приходим к модели СРП с фиксированными параметрическими характеристиками d в условиях воздействия множественных возмущений w 1 ( t ), w 2 ( t ), полагая в (1)-(3) w = ( Q ( X ,0 ) , ~ ; w 1 , w 2 е W ) [12, 13].
В двух последних случаях соответствующим образом «сужается» ансамбль траекторий (6).
-
2 Детерминированная задача оптимального проектирования программных управлений режимами функционирования СРП
Рассмотрим базовую частную задачу поиска программных оптимальных управлений u V , u S применительно к динамической модели СРП (1)-(3) с полным объёмом априорной информации о проектных решениях g , параметрических характеристиках объекта d и внешних воздействиях w ~ 1 , w ~ 2 в условиях
-
(7) w = w е W ; g = g е G .
Искомые управляющие воздействия в большинстве случаев стесняются лишь известными пределами их возможных изменений
-
(8) uV min < uV ( X , t ) < uV max ; uS min < uS ( X , t ) < uS max , t е [0, T ],
непосредственно характеризующими допустимые множества U V ( X , t ) и U S ( X , t ) в (4).
В соответствии с типичными технически реализуемыми условиями по достижению с допустимой погрешностью заданного состояния СРП в конце процесса управления, для большинства представляющих наибольший интерес прикладных задач необходимо обеспечить за время Т приближение Q ( X , T ) к требуемому пространственному распределению управляемой величины Q ** ( X ) с оцениваемой в равномерной метрике допустимой точностью s > 0 :
-
(9) maxi Q ( X , T ) - Q ** ( X )| < 8 .
X е У
Качество процесса управления оценивается в достаточно общем случае по величине I 1 максимума по r -мерному векторному параметру y e Y с Er функционала I , являющегося заданной числовой функцией своих аргументов
-
(10) 1 1 = max I ( Q ( X , t ), U y , us , g , w , T, y ) ^ min . y e Y U y G Uy- , U s g U s
В схему (10) укладываются типичные задачи оптимизации СРП по критериям быстродействия, энергопотребления, минимизации на V э X отклонений Q(X , t ) от Q ** ( X) в различных метриках [8, 9].
Исследуемая проблема сводится к определению стесненных ограничениями (8) УВ u V , u S , которые переводят объект (1)-(3) в условиях (7) из заданного начального в требуемое конечное состояние согласно (9) при минимальном значении критерия оптимальности (10).
В ряде частных случаев данная задача рассматривается в условиях перевода требования (9) в критерий оптимальности вида (10) при y = X :
-
(11) 1 1 = maxi Q ( X , T , U y , U s ) - Q ** ( X ) ^ min X e V uV , uS
-
2.1 Параметризация управляющих воздействий
-
2.2 Редукция к задаче полубесконечной оптимизации
без ввода дополнительных ограничений на конечное состояние объекта [8, 9].
Структура искомых программных управлений u * ( X , t ), u S ( X , t ) для широкого круга задач оптимизации СРП может быть установлена с использованием известных аналитических условий оптимальности [1-3, 8-10]. Указанным путём во многих случаях может быть получено параметрическое представление этих воздействий с точностью до вектора А ( N ) = (А^ ) ), i = 1, N , определённым образом упорядоченной последовательности конечного числа N параметров А^ N ) , A ( 2 N ) ,..., A ( N ) , непосредственно характеризующих управляющие воздействия в пространственно-временной области их определения (« А ( N ) -параметризация»).
В целом ряде прикладных задач изначально требуется найти управляющие воздействия в заданном классе А ( N ) -параметризуемых функций согласно исходным требованиям, диктуемым техническими возможностями их реализации.
Если непосредственное осуществление операции А ( N ) -параметризации становится затруднительным, то она может быть реализована путём построения конструктивной процедуры отображений на множество Q N допустимых значений А ( N ) параметров более общей природы, в роли которых выступает, например, применительно к сосредоточенным управляющим воздействиям, набор финишных значений первых N переменных бесконечной системы сопряженных уравнений принципа максимума Понтрягина при равных нулю конечных значениях остальных её компонент (« у ( N ) -параметризация») [10].
Интегрирование в аналитической или численной форме уравнений модели объекта (1)(3), (7) с А ( N ) -параметризованными управлениями uV ( А ( N ) , X , t ), uS ( А ( N ) , X , t ) позволяет получить конечное состояние объекта Q ( X , T ) в (9) и значение критерия оптимальности I в
-
(10) в форме явных зависимостей Q ( X , А ( N ) ) и I ( у , A ( N ) ) от своих аргументов. При этом минимально достижимые в классе таких управлений значения s ^ N ошибки s равномерного приближения Q ( X , T ) к Q ** ( X ) в (9)
(12) = min
A ( N > eQ n
{ m an] Q ( X , A ( N ’ ) - Q "( X ) }
X ∈ V
не возрастают (как правило, монотонно убывают) с ростом N е {1, р } [9]
-
(1) > F(2) > > F(p) = F „ > О (1J) £ min > £ min > ... > £ min s inf ,
характеризуя сужающееся к Q ** ( X ) семейство целевых множеств для s = s m j in , j = 1, р в (13). Здесь точная нижняя грань s inf достижимых по условию (9) значений s в цепочке неравенств (13) оказывается равной минимаксу ^П , где р = ю при s inf = 0 и р<« при s inf > 0 соответственно для управляемых и неуправляемых относительно Q ** ( X ) объектов [1, 8, 9].
В широком классе задач А ( N ) -параметрической оптимизации оптимальные управляющие воздействия n V , и * в соответствии с (13) характеризуются минимально возможной для заданного значения s в (9) размерностью N = N 0 вектора А ( N ) по определению минимакса в (12) [8-10]:
-
(14) N 0 =uvs : s min <s<s m,i - 1) , ие {1, р }.
Отсюда, в частности, следует, что для всех достижимых значений s > 0, удовлетворяющим неравенствам (14), А ( N ) -параметризация оптимальных управлений оказывается конечномерной.
В результате А ( N ) -параметризации производится точная редукция исходной задачи, согласно (9), (10), (12), (13), к задаче полубесконечной оптимизации (ЗПО) на минимум функции 1 1 ( А ( N 0) ) конечного числа переменных A N 0) , i = 1, N 0 , с бесконечным числом ограничений, диктуемых требованием (9) для всех X е V [8, 9]:
1 1 ( A ( N 0 ) ) = max I ( y , A ( N 0 ) ) ^ min ;
У e Y A ( N 0 ’ eO n 0
ф ( а ( N 0 ’ ) = max
X e V I
I Q ( X , A N 0 ’ ) - Q * ( X )
< ( N 0’ < г. < (NN 0 -1) М < л
- 6 ; 6 min - 6 < 6 min , N 0 - р -
-
2.3 Альтернансный метод в задачах параметрической оптимизации СРП
Решение целого ряда ЗПО вида (15), (16) может быть найдено конструктивным альтер-нансным методом, распространяющим на ЗПО результаты теории нелинейных чебышёвских приближений [14, 15] в условиях некоторых малостеснительных для многих прикладных задач допущений [8, 9]. Метод базируется на специальных свойствах вектора А ( N 0) оптимальных решений ЗПО (15), (16), установленных при указанных допущениях с использованием упрощённых, по сравнению с известными, альтернансных форм необходимых условий экстремума в задачах недифференцируемой оптимизации и дополнительной информации о конфигурации на V э X и Y э у пространственного распределения Q ( X , А ( N 0) ) и I ( у , А ( N 0 ) ), диктуемой закономерностями ПрО исследуемой конкретной задачи.
Согласно этим свойствам, одинаковые значения I(y,A(Nо)), равные I1(A(Nо)) в (10), и максимально допустимые отклонения Q(X,Д(Nо)) -Q**(X)|, равные е, достигаются в некоторых точках, соответственно yV е Y, v = 1, Ry , и Xо е V, j = 1, RX , суммарное число которых оказывается равным числу всех неизвестных в ЗПО (15), (16), включая ANо), i = 1,N0 , величину I1(A(Nо)) и минимакс етП), если е = етП), в соответствии со следующими соот ношениями [9]:
-
(17) R y + R x = N о + 1 , если £< п о) < е < е ;
-
(18) r x = N о + 1, если е = е^ ) ;
-
(19) R y = N о + 1, если е> ~ ,
где
-
(2о) ~ = Ф 1 ( A ( N о ) ) ; Д ( N о ) = arg ( N о пГ I 1 ( Д ( N о ) ) .
Утверждение (17), дополненное условиями существования экстремума функций
I ( у , Д ( N о) ) и Q ( X , Д ( N ) ) - Q ** ( X ) соответственно в точках y v е int Y , q = 1, R 1 , и q y
Xо е int V, p = 1, RX 1, приводит при заданной величине е в (16) к определяющей системе p равенств
_ _ бЦу о ,Д( N о))
I ( у о , Д ( N о ) ) = 1 х< & N о ) ); * = о;
дУ v = iR; q = jR"; Ry 1 < Ry; yv°q е {yv0};
|Q(Xо, AN•>) -Q"(X")| = е; X (q(x,Д При наличии дополнительной содержательной информации о конфигурации распределения I (y, Д(N о)) на Y э y иQ(X, Д(Nо)) - Q**(X) на V э X в зависимости от величины е, позволяющей идентифицировать точки X о и yv°, данные равенства редуцируются к системе H + H1 уравнений с H + H 1 неизвестными, где H = RX + Ry = Nо+1, H 1 = rRy 1 + mRX 1, а в роли неизвестных фигурируют Nо составляющих A(Nо),i = 1,Nо, вектора Д(Nо); минимакс 11(Д(Nо)); rRy 1 координат Ry 1 точек yV экстремума I(y, Д(Nо)) на Y и mRX 1 координат RX 1 точек Xо экстремума разностиQ(X, Д(Nо)) - Q**(X) на V. p Подобным образом случай е = ето) в соответствии с утверждением (18) приводит при RX = Nо +1 к системе Nо + mRX 1 +1 уравнений (22) с Nо + mRX 1 +1 неизвестными A(-Nо),Xо p и 8^0), а при 8 > ~ на основании (19) получаем для Ry = N0 +1 систему N0 + rRy 1 +1 уравнений (21) с N0 + rR 1 +1 неизвестными А^о),у0 и I1(А(Nо)). yq Для модификации задачи (15), (16) с непрерывно дифференцируемой целевой функцией 11(А(Nо)) = I(А(Nо)), образуемой в частном случае, когда I(у, А(Nо)) не зависит от у, только число RX точек X0, j = 1,RX , становится равным числу искомых значений А^о), i = 1,N0и СтО) в случае 8 = 8^0), а соответствующая система равенств (17)-(19) упрощается следующим образом: (23) rx = N0, если 8N) < 8< Cn-1); (24) RX = N0 +1, если 8 = 8т0). В данном случае равенство (23) аналогичным путём приводит к системе N0 + mRX 1 уравнений (22) с N0 + mRX 1 неизвестными А(№0), X0 для заданного значения 8 > 8тп0), а p случай (24) совпадает с (18). В частном случае (11) задача полубесконечной оптимизации (15), (16) сводится к минимаксной задаче нелинейных чебышёвских приближений (25) Ц(А(N0’) = maxiQ(X, А(N0’)- Q**(X)| ^ min XeV I I А(N0’eQN0 без дополнительных ограничений с последующей редукцией, подобно предыдущим вариантам, равенств (22) в условиях (24) при 11(А(N0)) = 8(Nn)к расчётной системе уравнений. Решения относительно указанных неизвестных систем уравнений, конструируемых по специально разработанной вычислительной процедуре в зависимости от величины 8 в (16) на основании равенств (21), (22) [8], содержат искомые решения ЗПО (15), (16) и могут быть найдены стандартными численными методами. Специфическая проблема редукции соотношений (21), (22) к расчётным системам уравнений во многих случаях может быть решена с привлечением закономерностей ПрО исследуемой задачи управления СРП, позволяющих априори выявить характер поведения на множествах Y э у и V э X функций I(у,А(N0)) и Q(X,А(N0)) -Q**(X) для заданных значений 8 и идентифицировать точки X0, yV в (21), (22). В частности, в [9] установлены все возможные варианты формы этих распределений применительно к характерным условиям Q**(X) = const, Q(X,0) = const при 8 = [8^, 8inf] в базовых задачах оптимального по быстродействию и расходу энергии управления нестационарными температурными полями, описываемыми уравнениями теплопроводности различной пространственной размерности вида (1)-(3) в областях V канонической формы с типичными внутренними и граничными управляющими воздействиями. Процедура параметризации УВ, редукция исходной задачи оптимизации к ЗПО и технология её решения альтернансным методом существенно усложняются при использовании векторных УВ (в частности при совокупном применении внутренних и граничных управлений) за счёт возникновения специфической проблемы выстраивания в однозначно фиксируемом порядке конкретной последовательности параметров А(^), i = 1, N с присвоением каждому из них заранее определяемого номера i e {1, N} , не меняющегося для всего ряда натуральных значений N = 1,р. В зависимости от каждого из формально возможных вариантов такой последовательности изменяются величины минимакса в (11), члены цепочки неравенств (13) и размерность N0 искомого решения Δ(N0) ЗПО. В типичных для приложений задачах со скалярными внутренними или граничными УВ подобная проблема достаточно просто решается с использованием закономерностей ПрО [8, 9]. Описываемая схема алгоритмически точного решения краевых задач оптимального управления линейными и нелинейными моделями СРП параболического типа альтернансным методом апробирована при поиске Δ(N) - и ψ(N) -параметризованных сосредоточенных и пространственно-распределённых УВ в задачах оптимизации по ряду базовых технико-экономических критериев применительно к различным процессам технологической теплофизики, в том числе, с учётом фазовых ограничений на температурные и термонапряжённые состояния в процессе управления и других особенностей промышленных технологий [8, 9, 16]. Предлагаемая технология предварительной параметризации искомых УВ, конечных состояний объекта и критерия оптимальности, последующей процедуры точной редукции к ЗПО, разрешаемой с использованием альтернансных свойств искомых экстремалей и дополнительной информации о закономерностях ПрО, распространяется далее на значительно более широкий круг задач оптимального проектирования детерминированных и не полностью определённых моделей СРП. Ниже рассматриваются наиболее характерные постановки таких задач, сводимые к ЗПО различного вида, решения которых укладываются в общую схему (15)-(16) альтернансного метода. 3 Детерминированная задача оптимизации проектных решений в условиях заданных режимных управлений Данная частная задача оптимального проектирования СРП сводится к поиску статического распределённого управления g*(X) ∈G,которое переводит объект (1)-(5) в условиях фиксированных воздействий w = w~ ∈W и режимных управлений uv = u~v, us = u~s в требуемое конечное состояние согласно (9) с минимальным значением критерия оптимальности (26) I2=maxI(Q(X,t),u~v,u~s,g(X),w~,T, y) → min y∈Y g∈G вместо (10). Искомое проектное решение g*(X) может быть найдено по описанной выше общей схеме определения режимных управлений uv*и us*путём редукции исходной задачи к ЗПО вида (15), (16), разрешаемой теперь уже относительно вектора Δ(gN g) = (Δ(iNg)),i = 1,Ng , параметрического представления g*(X) I (A(Ng0’) = max I(y, A(Ng0’) ^ min ; g y^Y g A^g 0 ’eQg 0 Ф2(A^g0’) = max Q(X, A^g0’)- Q**(X) < 8; 8mN0’ < 8< ^N0-1’ Представляющая самостоятельный интерес задача оптимизации проектных решений объекта на стадии его функционирования в стационарном состоянии Qc(X ) при (28) lim dQI dt = 0; lim uv = const; lim us = const t→∞ t→∞ t→∞ во многих случаях сводится к виду (11) (29) I^ = maxiQ (X, g(X)) - Q**(X)| ^ min . X eV g (X )eG Процедура A^g)-параметризации g(X), аналогичная A(V)-параметризации режимных управлений, приводит к параметрическому представлению g(X, AN)), Qc (X, AN)) и 12(A(Ng)) управляющего воздействия, стационарного состояния СРП и критерия оптимальности. Последующая редукция к нелинейной задаче чебышёвских приближений вида (25) I (^g0)) = max Q (X, A('Vg0)) - Qi X) ^ g X∈V c g min к(Ng 0) Ag e“ Vg 0 позволяет найти ее решение AgNgо)с требуемой точностью по схеме альтернансного метода. Специфической особенностью задачи (30) является необходимость попутного определения границ области G в (4), исходя из фундаментальных законов сохранения энергетического или материального баланса в стационарном режиме работы СРП. 4 Детерминированная задача совместной оптимизации проектных решений и режимов функционирования СРП Общая детерминированная задача оптимального проектирования СРП (1)-(5) в отличие от рассмотренных в разделах 2 и 3 заключается в совместном определении допустимых проектных решений g*(X) и режимных управлений п* и u*, обеспечивающих в условиях известного вектора w = w e W достижение требуемых согласно (9) конечных состояний объекта (1)-(5) с минимальным значением критерия оптимальности (31) Iз = max I(Q(X, t), uy, us, g, -w, T, y) ^ min yeY Uv,Us,g вместо 11,12 в (10), (26) и (29). Процедура A(V) и A(Ng)-параметризации искомых воздействий uv, us и g(X) соответственно, формирование расширенного вектора параметров повышенной размерности A(N+Vg) = (AV),A(Ng)) и последующее интегрирование уравнений модели объекта (1)-(5) с параметризованными управлениями uv (A(V), X, t),us (A(V), X, t), g(X, A(Ng)) приводят к пара-(V+V) (V+V) метрическим зависимостям Q(X, Azg ), I (y, Azg ) конечного состояния объекта и критерия оптимальности (31) от своих аргументов. В результате опять обеспечивается редукция исходной задачи к ЗПО вида (15), (16): I3 (A(;0 + Vg0)) = max I(y, A(;0+Vg0)) ^ min ; 3 1 yeY A^0+Vg0’eOv0+Vg 0 Ф,(A.V0+v-0’) = maxQ(X,A.V0+v-0’)-Q"(X) < £; s*V0+Vg0’ < s< s*V0+Vg0-1), X∈V (или в частных случаях, подобных (11), к ЗПО вида (25), (30)), снова разрешаемой по общей предлагаемой схеме относительно искомой величины A(;0 + Vg0). Здесь размерность V0 + Vg0 вектора A(;0 + Vg0) опять определяется по правилу аналогичному (14) применительно к по- добной (13) цепочке неравенств для величин минимаксов, определяемых согласно (12) с заменой N на N + Ng . Векторный характер искомых управлений приводит к необходимости решения с помощью закономерностей ПрО, указанной в разделе 1, вспомогательной задачи формирования упорядоченной последовательности компонентов вектора (N+N„) /A(N+N„) .(N+N„) .(N+N„) A2g = (A21g , A22 g ,..., Az(N+N ), число N + Ng которых увеличивается с возрастанием N и Ng. 5 Задача оптимизации проектных решений СРП в условиях интервальной неопределённости параметрических характеристик объекта Самостоятельный интерес представляет задача оптимального проектирования СРП (1)(6) в характерных условиях интервальной неопределённости вектора b = (d, Q0) = (dj, j = 1, r; Q0) e W1 c W неизменных во времени параметрических характеристик объекта, к которым во многих случаях можно отнести параметрическое представление начального состояния объекта Q(X,0) = Q0 = const VX e V , где (33) W1 = dj,Q :djmin < dj < djmax; Q0min < Q0 < Q,_, j = 17}. При заданных внешних воздействиях W1, W2e W требования вида (9) должны быть выполнены для всех конечных состояний ансамбля (6) (34) Q(X,T,u,,us,g, W) = U{Q(X,T,u,,us,g, WnW2,b e W1 c W)}, образуемого всеми допустимыми согласно (33) реализациями значений b : (35) max [maxiQ(X,T,b) - Q**(X)|] < £. beW1 XeV । । В таком случае задача сводится к совместному определению uv*,us*, g*, обеспечивающих при w1 = v~i, w2 = W2 перевод ансамбля траекторий (6) в требуемое конечное состояние (35) с минимальным значением функционала качества I4, определяемого по принципу гарантированного результата в аналогичной (10) форме функции максимума: (36) I4= max I(Q(X, t), u,, us, g, "W1, W2, b) ^ min . beW1 uv,,us,g Подобная (27) A(N+Ng) -параметризация искомых воздействий приводит к редукции исходной задачи (35), (36) к ЗПО вида (32) с r +1 -мерным векторным параметром y = b I4 (4N0+Ng 0)) = max I (b, A(N0+Ng 0)) ^ min ; 4 1 beW1 2 A*N0+Ng 0 >eO n0+Ng 0 Ф 4(A(ZN°+Ng) ) = max Q (z, A(”0 + Ng 0) ze Z ) - Q**(X) < £; £m’ (N0+Ng 0) < <N0+Ng 0 min ~ £< £ min -1). ; z = (X,b); Z = V x W1 e Em+r+1 и континуумом ограничений, рассматриваемых на расширенном по сравнению с (32) множестве Z элементов z e Z, включающем наряду с пространственными переменными X e V допустимые значения вектора b e W1. Возникающая при этом дополнительная проблема выявления характера распределения Q(z, A(N0+ Ng0)) -Q**(X) на множестве Z в целях редукции системы равенств вида (21), (22) к расчётным системам уравнений альтернансного метода во многих случаях может быть решена на основе свойств результирующих состояний СРП для детерминированных состояний объекта и фундаментальных закономерностей ПрО [8-10, 16]. В наиболее характерных ситуациях точки z0 = (xо, bо), j = 1, Rx, в которых выполняются подобно (22) равенства Q(z 0, AN0 + Ng0)) - Q**(X j ) = £ , содержат комбинации предельно допустимых значений dj на границах множества W1 6 Программная реализация обратных связей в задачах оптимизации режимов функционирования СРП при наличии внешних возмущений В типичных условиях воздействия на реальный объект с заданными проектными решениями g = g e G в (4) и заранее фиксируемыми параметрическими характеристиками d = d e W1, множественных возмущений w1, w2 e W в (5), вся информация о которых исчерпывается заданием их граничных значений в пределах допустимой области W их изменения, * * возникает задача поиска оптимальных программных управлений uv , us ансамблем траекторий ~ ~ Q(X,t,uv,us,g,T,d, W) = U{Q(X,t,uv,Us,g,T,d, Q0, W1, W2 e W)}, t e [0,T]. Эта задача может быть записана в подобной (35), (36) форме max [max Q(X, T, Q0, W1, w2 ) - Q (X)] < £; Q0, w1, w2eW X eV ~ I5 = max I (Q(X, t), uv, us, g, d, Qo, w, w2) ^ min Q0,W1,w2 eW Uv ,Us с последующей редукцией после параметризации искомых управлений к ЗПО вида (37): Т (Д(N0)Л — Л<N0) ла) ла) 1 х min I 5 (AZ ) = maxI(Az ,Q0, w1, w2 ) ^ . .min Q0, иц w2eW A(N0’eQ N0 (N0) (N0 ) ** (N0 )
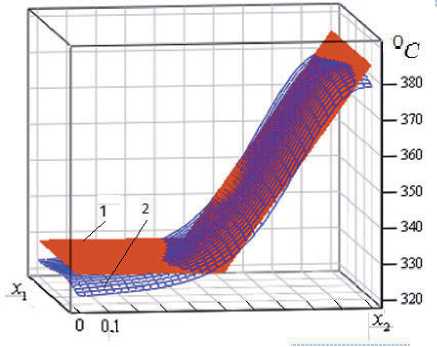
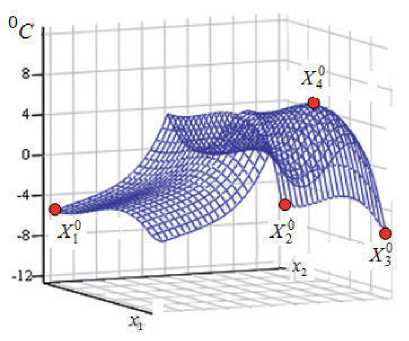
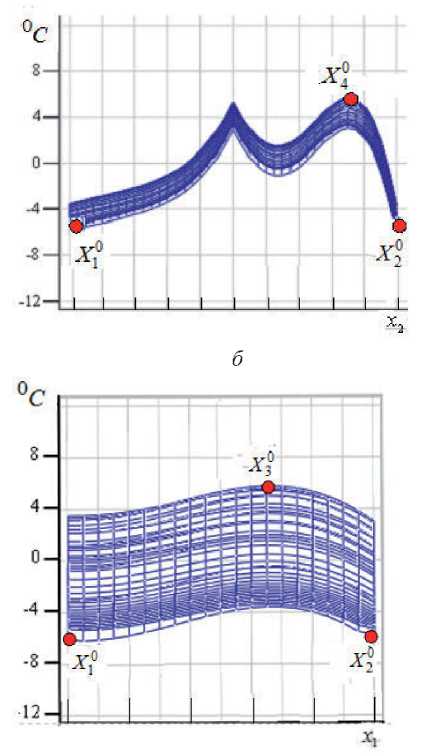
(41) ф 5 (AZ ) = max Q(z 1, AZ ) - Q (X ) < £; £nin < £ < £nin , Z1e Z1 z 1 = (X,Q0,w1,w2); Z1 = Vx W2; W2 = (Q0,w1,w2) e W. Описанная стратегия программного управления по принципу гарантированного результата ансамблем траекторий СРП, порождаемым всеми допустимыми реализациями учитываемых возмущающих воздействий, заведомо приводит к существенным потерям по миними- зируемому критерию качества по сравнению с замкнутыми системами автоматического управления, обеспечивающими требуемый уровень подавления возмущений. Однако проблема синтеза соответствующих оптимальных автоматических регуляторов отличается известными затруднениями принципиального характера [11, 13]. Возможный путь их преодоления состоит в переходе от трудноразрешимой задачи построения в явной форме алгоритма оптимального управления с обратными связями к поиску реализующей искомый закон регулирования последовательности программных оптимальных управлений uVk(X,t),u*sk(X, t), t e [tk,T],0 < tk < T, для каждого из которых начальное на ин- тервале [tk, T] состояние ансамбля Q(X, t, uv, u , g, T, d, W) в (38) вычисляется в заранее s t=tk фиксируемые на временной сетке с заданным периодом квантования h моменты времени tk = kh,k = 0,с-1,сh = T по сигналам Qu(X,tk) измерения текущего состояния объекта с помощью известных способов его наблюдения [12, 13]. В таком случае исходная минимаксная задача оптимизации (39), (40), сформулированная на всём временном промежутке [0, T], сводится к последовательно разрешаемым на интервалах [tk,T] э t,к = 0,с-1, задачам вида (39), (40) программного управления «суживающимися» по мере возрастания tk ансамблями траекторий Q ( X, t, uVk, uSk, g, T, d, w1 k, w2k ); w1 k,, w2k e W, t e [tk, T ], с наблюдаемыми начальными состояниями Qu (X, tk ). При этом искомые оптимальные управления u*, uS на всём протяжении процесса управления компону-* * ются из участков изменения uVk, uSk на промежутках [tk, tk + h ]: u* = {uk,t G [tk,tk + h]};u* = (u*,uS);uk = («*k,uSk); tk = kh; k = 0, с -1; сh = T. Построение uk в каждой позиции (tk, Qu (X, tk )) по существу формирует закон управления с обратной связью uk* (tk, Qu (X, tk ) . Если вычисление uk производится за время, не превышающее достаточно малого периода квантования h , то этот закон реализуется с шагом h : (43) uk( tk + h ) = uk*( tk, Qu (X, tk )), обеспечивая тем самым последовательную отработку алгоритма (42) в реальном времени. При этом в условиях h ^ 0 получаем в соответствии с (42), (43): (44) u* = u**(т,Qu (X,t))Vtg (0,T). Дальнейшая процедура A(Nk)- и A(N)- параметризации искомых управлений uk и u* соответственно приводит по предлагаемой общей методологии к последовательному решению с шагом h ЗПО вида (41) 11 k (^Nk 0), tk ) = ,maxIk (^Nk 0), Q 0, tk , w1 k , w 2 k ) ^ (Nmin; Q0, w1 k, w2 k A(e0 k 'eO Nk0 (45) Ф 1 k (AN0), tk) = max Q(z 1 k, <0k), tk) - Q** (X) < г(k); z1 keZ1 k 1 k = 0,^-1; z 1 k = (X, Q0, W1 k, w2k ); Z1 k = V x W2k; W2k = (Q0, W1 k, w2k) G W с зависящим от tk континуумом ограничений Ф1 k (A(Nk0), tk ) на конечное состояние объекта при последовательном уменьшении влияния на него интегрального эффекта воздействия возмущений w1 k, w2k e W2k, на промежутках t e [tk, T] при tk ^ T . Здесь явные зависимости Q(z1 k, A(Nk0),tk) и Ik(A(Nk0),Q0,tk, w1 k, w2k) от своих аргументов должны быть получены после интегрирования уравнений модели объекта (1)-(3) с измеряемым начальным состоянием Q(X,tk) = Qu(X, tk) вместо (3) при А(Nk) -параметризованном управлении uk . В соответствии с требованием (39) ошибки равномерного приближения s(k), k = 0, с -1, в (45) должны выбираться таким образом, чтобы обеспечить выполнение соотношения а(с-1) < s. По найден- ным оптимальным значениям Δ(ΣNk0) вычисляются и реализуются на объекте, согласно алгоритму (42), параметры Δ(ΣN0) оптимальных управлений uV* и u*S . 7 Оптимальное проектирование объектов технологической теплофизики В качестве примера, представляющего самостоятельный интерес, рассмотрим детерминированную задачу оптимального проектирования установки градиентного индукционного нагрева (ИНУ) цилиндрических слитков из алюминиевых сплавов перед последующей операцией прессования в ответственных технологических комплексах обработки металла давлением [16]. Температурное поле Q(x1,x2) в процессе индукционного нагрева описывается в зависимости от времени t∈[0,T] , радиальной x1 и продольной x2 координат в области V = (x1 е [0,1], x2 е [0,1]) двумерным неоднородным уравнением теплопроводности в относительных единицах вида (1) с начальными и граничными условиями (2), (3) третьего рода и заданным законом пространственного распределения внутренних источников тепла, определяемым известным решением уравнений Максвелла для электромагнитного поля индуктора. Градиентный нагрев слитка с положительным перепадом конечной температуры Q(x1,x2,T) по его длине x2в направлении прессования, который обеспечивает существенное повышение производительности пресса, осуществляется в ИНУ двухсекционного исполнения (рисунок 1) [16]. В качестве внутренних сосредоточенных УВ uV (t) используются суммарные удельные мощности внутреннего тепловыделения в обеих секциях uV (t) = (uV1(t),uV2(t)), подчиненные ограничениям вида (8): Рисунок 1 – Конструкция двухсекционной ИНУ периодического действия: 1– секция индуктора; 2– заготовка (46) 0< uv 1(t) < uvimax; 0< uv2 (t) < uv2max . В роли искомых базовых проектных решений ИНУ заданной двухсекционной конструкции будем рассматривать максимальные мощности секций uV1maxи uV2max, стесняющие возможные пределы изменения режимов УВ в (46), и, следовательно, в данном случае будем иметь для g(X ) в (4): (47) g(X ) = (uV1max, uV2max) = const. В качестве критерия оптимальности в условиях заданной длительности процесса нагрева фиксируемой требуемой производительностью технологического комплекса «ИНУ–пресс» принимается, подобно (11), достижимая точность равномерного приближения конечного температурного состояния к его заданному неравномерному распределению перед последующим прессованием слитка: (48) I* = max Q)(xDx2,T,и, 1 (t),u,2(t),и,imax,u,2max)-Q**(xvx2) ^min . X1, X 2^[0,1]l I uv, g ** Требования к градиентному характеру нагрева слитка приводят к заданию Q (x1, x2) в форме кусочно-линейной функции продольной координаты Q*(1), 0 < x2 < x2; Q **( x1, x 2) = < Q*(1) +Q*(2)- Q*(1) 1 - x 2 (x2 *. * - x2 ), x2 < x2 < 1 с известными постоянными Q*1), Q*2), x2 . Проблема теперь сводится к совместному поиску оптимальных управлений u,1(t), u,2(t) , стесненных ограничениями (46) и проектных решений u,1max,u,2maxв (47), обеспечивающих в совокупности достижение минимального значения критерия оптимальности (48). Данная задача является частным случаем общей детерминированной задачи (31) оптимального проектирования СРП с целевой функцией вида (11). Известные условия оптимальности в форме принципа максимума Понтрягина заведомо определяют u,1(t) и u,2(t) в виде кусочно-постоянных функций времени, попеременно принимающих только свои предельно допустимые значения согласно (46) [1, 8, 9]. Тем самым обеспечивается А(N) -параметризация искомых УВ с точностью до числа N и длительностей А("), i = 1, N, интервалов их постоянства на протяжении процесса управления в условиях свободы выбора Т из условий достижения минимальной величины критерия оптимальности (48). В наиболее просто реализуемых режимах работы ИНУ с синхронным управлением во времени обеими секциями один и тот же вектор А(N) характеризует одновременно оба воздействия и,1 и и,2. N При T = ^А(") для простейшего по условиям технической реализации изначально зада-i=1 ваемого режима работы ИНУ с неизменной во времени максимальной мощностью обеих секций будем иметь Nо = 1, и вектор А(N0) = А1-1тем самым определён с точностью до длительности T = А^1 процесса управления. А("до)-параметризация искомых проектных решений g(X) в данном случае непосредственно описывается их заданием в форме (47) при Ng0 = 2 : (50) А"0)= А® = (А^, Ад2); А® = и, 1„; Ад2 = и,,„„. (No + N„ о) В итоге получаем для совместного вектора искомых параметров АЕ0 g0: (51) N0 + Ng0 = 3; А"0 +Ng0)= А1^) = (А^,и, 1,„,и,2max). Интегрирование (в аналитической или численной форме) уравнений модели при параметризованных управлениях uV(t,А^1)),g(X) = (uV 1max,uV2max) с последующей подстановкой результатов в (48) обеспечивают редукцию к задаче вида (32) без ограничений с целевой функцией, подобной (25) и (30): I*(А”0 +Ng0)) = max Q(xi,x2,А^0 +Ng0))-Q**(Xi,x2) = X1, X 2^[0,1] = max .IQ(xi, x 2, А(11)’ uVimax, uV 2max ) -Q АX1,X 2 )| ^ (1)min• x1,x2e[0,1] А1 , uv 1max, uV 2 max Альтернансные свойства искомых решений AN0 +Ng0)= (А11), uV 1max, uV2max), определяемые в рассматриваемом случае подобно задаче (25) базовыми соотношениями (22), (24) (где надо заменить АN0)на AN0+Ng0)), приводят с использованием известных закономерностей конечного пространственного температурного распределения [8, 9, 16] к следующей системе шести уравнений альтернансного метода, разрешаемой известными способами относительно всех шести искомых параметров оптимального процесса нагрева А11), uv 1max, UV2max sm^n= min I*, X0 = (x0e, x 0 e) включая выступающие в роли промежуточных неизвестных координаты точки экстремума X4: 0дО) ** о (3) . Q(X1 , А1 , uv 1max, uv2max) Q(X 1 ) ^min ; 0 T(l) ** 0(3) Q(X 2, А1 , uV 1max , uV2max ) Q(X 2) 6min ; 0 T(1) ** 0(3) Q(X 3, А| , uV 1max, uV 2max ) Q (X 3) 0 T(1) ** 0(3) Q(X 4, А1 , uV 1max, uV 2max) Q(X 4) 6 min; d 0 дС1)** (53)n(Q(X 4, А1 , uV 1max , uV2max) Q(X 4 )) 0 ox1 d 0 T(1) _ (Q(X 4, А1 , uV 1max, uV2max) Q(X 4 )) 0 dx2 X0= (x.°,x,°.), j = 1,4; x,0,. e {x. :0 < x. < 1};x0, e {x, :0 < x, < 1}; J 1 j 2 j 1 j 1 1 2 j 22 X0 = (0,0); X20= (0,1); X3 = (1,1); X40= (x^, x0e); 0 < x0e< 1; 0 < x0e< 1. Некоторые расчётные результаты, полученные при нагреве цилиндрических слитков из алюминиевых сплавов Д16 (АА2024) в ИНУ двухсекционного исполнения при Т=215°С, приведены на рисунке 2. Заключение Предлагается технология построения программной стратегии принятия решений применительно к широкому кругу задач оптимального проектирования сложноструктурированных систем с распределёнными параметрами, трактуемых как комплексная проблема поиска проектных решений и последующих режимов функционирования объекта, которые обеспечивают в совокупности достижение экстремальных значений совместного критерия качества. Развиваемая в статье методология базируется на предварительных процедурах параметризации УВ, операции точной редукции исходной задачи к специальным задачам математического программирования и конструктивных способах их последующего решения с исполь- зованием альтернансных свойств искомых экстремалей и фундаментальных закономерностей конкретной ПрО. а в Рисунок 2 – Заданное (1) и полученное (2) температурные распределения по объёму заготовки в процессе нагрева в ИНУ (а), отклонение полученного температурного распределения от заданного по объему (в), радиусу (г) и длине (б) заготовки для I * = 60 с : д^ = 184.3 c; UV1max = 2.881 ■ 106 Вт I м3; uV2max = 4.424-106 Вт I м3; x^ = 0.675; x 0 e = 0.853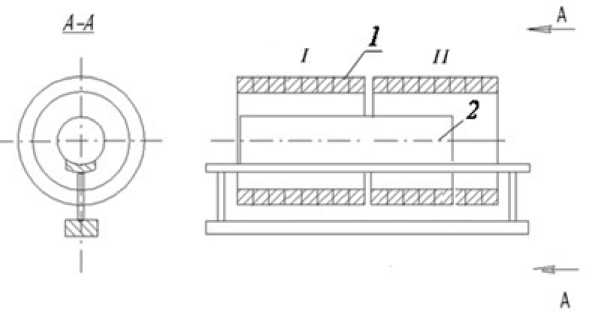
Список литературы Технология оптимального проектирования сложноструктурированных систем с распределёнными параметрами: программные стратегии принятия решений
- Бутковский, А.Г. Теория оптимального управления системами с распределенными параметрами / А.Г. Бутковский. - М.: Наука, 1965. - 474 с.
- Бутковский, А.Г. Методы управления системами с распределенными параметрами/ А.Г. Бутковский. - М.: Наука, 1975. - 568 с.
- Бутковский, А.Г. Оптимальное управление нагревом металла / А.Г. Бутковский, С.А. Малый, Ю.Н. Андреев. - М.: Металлургия, 1972. - 440 с.
- Лионс, Ж.-Л. Оптимальное управление системами, описываемыми уравнениями с частными производными / Ж.-Л. Лионс. - М.: Мир, 1972. - 414 с.
- Лурье, К.А. Оптимальное управление в задачах математической физики / К.А. Лурье. - М.: Наука, 1975. - 478 с.
