Теоретическое исследование влияния способа ориентирования асимметричных заготовок на производительность механических дисковых зубчатых бункерных загрузочных устройств

Автор: А.Л. Бахно, Е.В. Пантюхина, С.А. Васин
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 6 т.27, 2025 года.
Бесплатный доступ
В статье рассматриваются способы захвата различных видов асимметричных по торцам заготовок тел вращения в механических дисковых бункерных загрузочных устройствах. Представлены схемы захвата заготовок в положении стоя в различных видах зубчатых бункерных загрузочных устройствах с пассивным ориентированием заготовок: традиционном для заготовок в форме колпачка с тяжелым дном, усовершенствованных с коническим и сферическим кольцевыми ориентаторами для заготовок с асимметричным торцом в форме конуса и полусферы, а также регулируемым ориентатором, обеспечивающим универсальность конструкции для различных видов заготовок в форме колпачка. Получены математические модели рассмотренных видов зубчатых бункерных загрузочных устройств при реализации в них активного ориентирования заготовок и представлены результаты сравнения вероятности захвата и производительности устройств при различных способах ориентирования для двух видов заготовок, в том числе в виде графиков указанных параметров.
Бункерное загрузочно-ориентирующее устройство, асимметричные заготовки, активное ориентирование заготовок, пассивное ориентирование заготовок, способ захвата заготовок
Короткий адрес: https://sciup.org/148332860
IDR: 148332860 | УДК: 621.9.06 | DOI: 10.37313/1990-5378-2025-27-6-182-187
Theoretical Study of the Infl uence of the Method of Orientation of Asymmetric Workpieces on the Feed Rate of Mechanical Disk Gear Hopper Feeaders
The article describes meth ods of gripping various types of rotation bodies asymmetric at the end faces of workpieces in mechanical disk hopper feeders. Schemes for gripping workpieces in standing position in different types of toothed hopper feeding devices with passive orientation of workpieces are presented: traditional for workpieces in the form of a cap with a heavy bottom, improved with conical and spherical annular orientators for workpieces with an asymmetric end in the form of a cone and a hemisphere, as well as an adjustable orientator that provides design versatility for different types of workpieces in the form of a cap. Mathematical models of considered types of toothed hopper loading devices are obtained when active orientation of workpieces is realized in them, and results of comparison of probability of gripping and productivity of devices at different methods of orientation for two types of workpieces are presented, including in the form of diagrams of specified parameters.
Текст научной статьи Теоретическое исследование влияния способа ориентирования асимметричных заготовок на производительность механических дисковых зубчатых бункерных загрузочных устройств
Способ захвата и ориентирования заготовок в механических дисковых бункерных загрузочных устройствах (БЗУ) перед их подачей в автоматические роторные линии или другое технологическое оборудование оказывают существенное значение на производительность загрузочного устройства. Чтобы ее значения были максимальны необходимо в конструкции устройства предусмотреть условия не только для захвата заготовок в требуемом положении с наибольшей вероятностью, обеспечив их дополнительное пересыпание и ворошение, а также и для переориентирования заготовок при их неправильном захвате (активный способ ориентирования) [1, 2]. Чтобы оценить, как влияет способ захвата и ориентирования заготовок на производительность загрузочного устройства, необходимо разработать математические модели вероятности захвата заготовок, учитывающие влияние параметров заготовок и способ их ориентирования на параметры БЗУ и его производительность.
Комплексный подход для описания вероятности захвата и производительности БЗУ в виде математических моделей, применяемый при проектировании эффективно функционирующих БЗУ, был описан во многих работах [3, 4]. В работах [5, 6] были представлены выражения, описывающие вероятностные коэффициенты математических моделей при активном и пассивном ориентировании заготовок тел вращения с неявной асимметрией в четырех типах БЗУ (зубчатом БЗУ с радиально расположенными карманами и захватом заготовки в положении стоя, вертикальном БЗУ и захватом в положении лежа, БЗУ с радиаль- ными карманами и захватом в положении лежа, БЗУ с тангенциальными карманами и захватом в положении лежа).
а б
Рис. 1. Схемы западания заготовок
Разработка математических моделей вероятности захвата позволит оценить, как влияет способ захвата и ориентирования на производительность рассматриваемых типов БЗУ при различных способах захвата и ориентирования заготовок [7]. Если выясниться, что влияние существенно, то необходимо в данных БЗУ повышать эффективность данных процессов путем их усо- вершенствования.
в положениях стоя (а) и лежа (б)
ТЕОРЕТИЧЕСКИЕ МОДЕЛИ ПРОИЗВОДИТЕЛЬНОСТИ ЗУБЧАТЫХ БУНКЕРНЫХ ЗАГРУЗОЧНЫХ УСТРОЙСТВ С ЗАХВАТОМ АСИММЕТРИЧНЫХ ЗАГОТОВОК В ПОЛОЖЕНИИ СТОЯ
Захват заготовки в положении стоя осуществляется преимущественно в зубчатых БЗУ, некоторые типы которых для различных стержневых заготовок и смещений их центра масс, измеряемого величиной xc от асимметричного торца, приведены на рис. 2 [8, 9].
а б в г
Рис. 2. Некоторые виды зубчатых БЗУ с захватом заготовок в положении стоя: а – классическое; б – усовершенствованное с коническим кольцевым ориентатором; в – усовершенствованное со сферическим кольцевым ориентатором;
г – усовершенствованное с регулируемым ориентатором
Для полых по торцам заготовок известно усовершенствованное БЗУ с криволинейным копиром [10], в котором также осуществляется захват заготовок в положении стоя.
Для рассматриваемых видов зубчатых БЗУ и загружаемых ими заготовок, кроме БЗУ с криволинейным копиром, были разработаны математические модели производительности при пассивном способе ориентирования заготовок различных типов [5, 11]. Скорректируем полученные ранее модели под активное ориентирование заготовок. При этом вид заготовки определяет и вид математической модели устройства.
Зависимости производительности от вероятности захвата П ( п ) для заготовок с торцом в форме усеченного конуса при их активном ориентировании в усовершенствованном БЗУ с коническим и сферическим кольцевым ориентатором соответственно получим:
1 —
1 — Р II — p 11 [arccos 2 п
μ
— 2 arcsin —J α
П = 60 U t
μ
— 2 arcsin —J
α
⋅ pc ⋅ p υ ,
n R Ф 3
[1 — p i — p и — p 11 (arcsin 1 ’^ = — arctan a )J180 0 1
n 2 f
\ 1 +1 f I
V I a )
1 —
П = 60 U t
7 v Ц сф
/ 1 — X c + x
1 — P II — p 11 [arccos 2 n
— p i — p 11 [arccos 2 n
— 2 arcsin
2 b
μ
2 arcsin —J α
- J α
×
⋅ pc ⋅ p υ ,
[1 — p i — p и — p 11 (arcsin 1 ’ ^^
π nR Фз
— arctan a )]180 d 1 f
а для усовершенствованного БЗУ с регулируемым ориентатором при активном ориентировании получим:
-
p III
1 - Р II-- 111 arccos
2 n
xc
+ 0,25 d 2
μ
- 2 arcsin —
α
П = 60 U t
- P i -
I 2 n
arccos
l - xc
-
- x c )2 + 0,25 d 2
• P c • Р u , (3)
1 - РI - РII
-
Р III
π
arcsin
. 1,1 d

n R ф 3
μ
2 arcsin — α
- arcsin
где вероятностные коэффициенты p j , p ц , p щ, характеризующие преимущественное положение после подбрасывания и падения на поверхность диска заготовок наибольшим цилиндрическим торцом с диаметром d , наибольшим асимметричным торцом с диаметром d 2 и длиной l соответственно, а также вероятности помех от сцепляемости заготовок p c и окружной скорости органов захвата p и определены в работе [11]; R - радиус диска БЗУ; а - угол наклона вращающегося диска БЗУ; ц - коэффициент трения между заготовками и диском БЗУ; Ф 3 - зона захвата заготовок в БЗУ; t - шаг карманов по периферии диска; a = dj l , b = xc / 1 , c = d 2 / 1 , f = kJ l ; x c$- координата центра масс сферического торца заготовки и средний его диаметр dc .
Полученные зависимости представлены взаимосвязями между параметрами заготовок и БЗУ и позволяют выявить пути повышения вероятности захвата и производительности.
РЕЗУЛЬТАТЫ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ ВЕРОЯТНОСТИ ЗАХВАТА И ПРОИЗВОДИТЕЛЬНОСТИ ЗУБЧАТЫХ ЗАГРУЗОЧНЫХ УСТРОЙСТВ ДЛЯ РАЗЛИЧНЫХ АСИММЕТРИЧНЫХ ЗАГОТОВОК
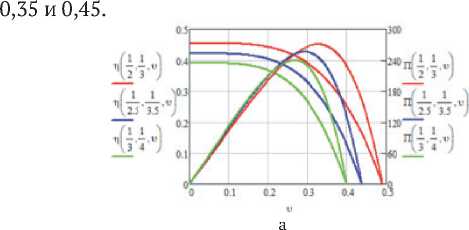
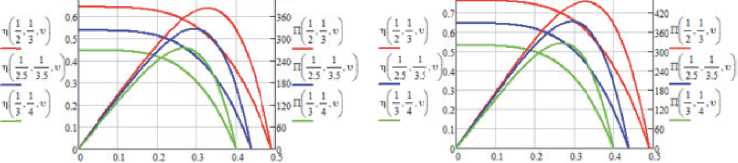
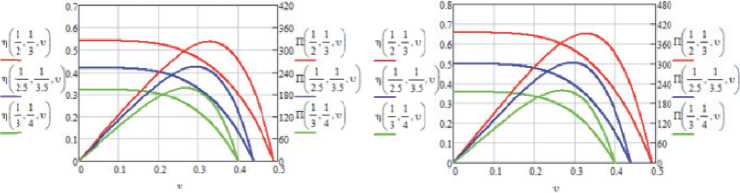
Для сравнительного анализа и оценки производительности (шт./мин) усовершенствованного зубчатого БЗУ с кольцевым ориентатором, зависимости которых описаны выражениями (1) для заготовок с торцом в форме усеченного конуса и (2) для заготовок со сферическим торцом, а также входящих в эти выражения коэффициентов вероятности захвата был проведен компьютерный эксперимент, результаты которого приведены соответственно на рис. 3 и рис. 4 в виде зависимостей П ( a , c , и ) и n ( a , c, и ) , в которых окружная скорость и (м/с) при значениях коэффициента трения
В
г
Рис. 3. Сравнение вероятности захвата и производительности зубчатого БЗУ с кольцевым ориентатором при загрузке заготовок с торцом в форме усеченного конуса: а - пассивное ориентирование, ц = 0,35 ; б - активное ориентирование, ц = 0,35 ;
в - пассивное ориентирование, ц = 0,45 ; г - активное ориентирование ц = 0,45
О 7 -------------------------------- ■И ЗО ФЛ -----------------------НЮ
а б
в г
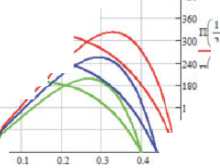

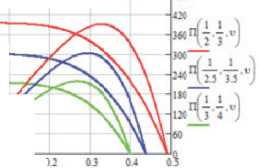
Рис. 4. Сравнение вероятности захвата и производительности зубчатого БЗУ с кольцевым ориентатором при загрузке заготовок со сферическим торцом: а - пассивное ориентирование, ц = 0,35 ; б - активное ориентирование, ц = 0,35 ; в - пассивное ориентирование, ц = 0,45 ; г - активное ориентирование ц = 0,45
Вероятность захвата и производительность БЗУ зубчатого БЗУ с кольцевым ориентатором во многом определяется соотношениями a = d i /1 , c = d 2 / 1 , коэффициентом трения и окружной скоростью. При этом максимальная производительность БЗУ при активном и пассивном ориентированиях для заготовок с торцом в форме усеченного конуса отличается в 1,85…2,4 раза, а для заготовок со сферическим торцом – всего лишь в 1,1…1,4 раза.
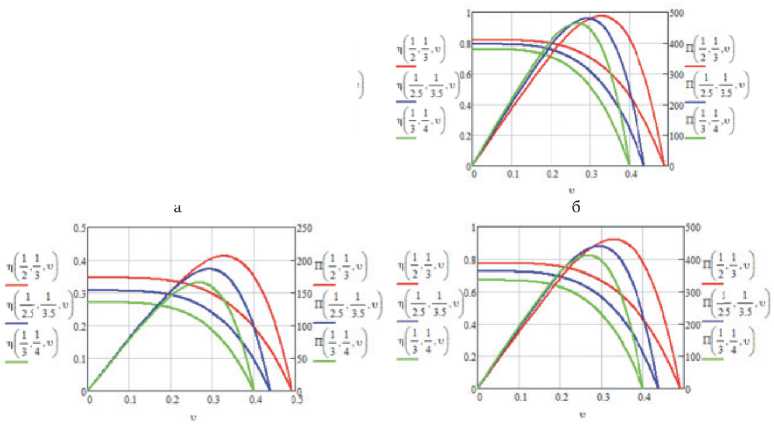
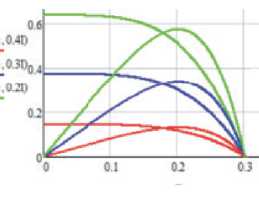
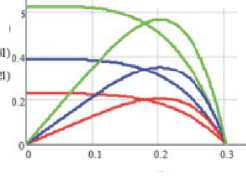
Компьютерный эксперимент для оценки вероятности захвата заготовок в форме колпачка и производительности (шт./мин) усовершенствованного зубчатого БЗУ с регулируемым ориентато-ром, математические выражения которых представлены формулой (3), проводился при различных положениях центра масса заготовок и окружной скорости и (м/с) органов захвата, а также различных значениях коэффициента трения и углах наклона бункера. Результаты математического моделирования приведены на рис. 5.
0 --------------------------------------------J W о. а --------—----------------------юо
|
ЛЯ 0.4 '^- Х. __ - Ду.0.40 ф>.0.<) /’хХ жду.озо цкол)04______ / |
|
|
Ду. од; ><е.оа) / J^X^XkX |
|
|
1W 02 |
|
|
0.1 02 03 0 V а |
4 % 0.1 0.2 03 0 б |
|
лллПС«,&Л) ЛШ / X |
|
|
ПО^ОЛ) nft'.OJl) |
|
|
100 02 --------Г |
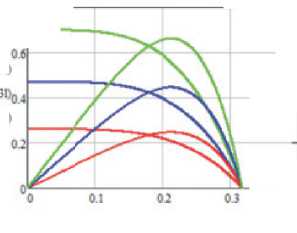
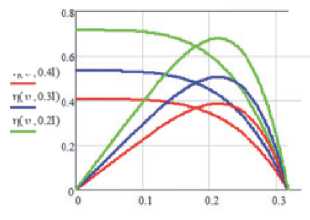
Как показали исследования вероятность захвата и производительность БЗУ для заготовок в форме колпачка во многом определяется положением центра масса: при этом, при соотношении xc = 0, 4 l данные показатели практически не зависят от активного или пассивного способа ориентирования, а при x c = 0,3 1 и x c = 0,2 1 эта разница видна существеннее. Изменение угла наклона диска на 5 ° приводит к существенному изменению показателей. Анализ влияния коэффициента трения не показал существенного влияния данного параметра на показатели эффективности работы БЗУ.
ЗАКЛЮЧЕНИЕ
Таким образом, как показали теоретические исследования вероятности захвата и производительности различных видах усовершенствованных зубчатых БЗУ при пассивном и активном ориентировании: с коническим и сферическим кольцевыми ориентаторами для заготовок с асимметричным торцом в форме конуса и полусферы, а также регулируемым ориентатором, обеспечивающим универсальность конструкции для различных видов заготовок в форме колпачка, значения производительности БЗУ во многом определяются формой и размерами заготовки, а также способом захвата. Так в некоторых БЗУ из-за несущественного повышения производительности в связи с переходом с активного ориентирования на пассивное не имеет смысла осуществлять модернизацию устройства. Это подтверждается необходимостью и целесообразностью разработки математических моделей производительности перед проектированием БЗУ перед принятием каких-либо конструкторских решений.
