Теоретическое обоснование адаптивной структуры системы автономной наземной навигации специального транспортного средства

Автор: Кулешов Владимир Васильевич, Лупанчук Владимир Юрьевич
Рубрика: Математическое моделирование
Статья в выпуске: 4, 2018 года.
Бесплатный доступ
В статье рассматривается возможность синтеза адаптивной структуры автономной системы наземной навигации (АСНН) специального транспортного средства (СТС). Предложен вариант повышения точности определения текущих навигационных параметров за счет адаптивного управления аппаратным обеспечением наземных транспортных средств.
Специальное транспортное средство, система наземной навигации, механический датчик скорости, доплеровский датчик скорости, оптоэлектронный датчик скорости, акселерометр
Короткий адрес: https://sciup.org/148309016
IDR: 148309016 | УДК: 527.625.1. | DOI: 10.25586/RNU.V9187.18.11.P.28
Theoretical substantiation of the adaptive structure of the system of autonomous ground navigation of a special vehicle
In the article, the errors of the complex system of ground navigation of a special vehicle, which are obtained from various speed sensors, are investigated. An option is proposed to improve the accuracy of determining current navigation parameters when positioning the STS on the Earth's surface due to the additional use of an optoelectronic speed sensor and accelerometers of an inertial navigation system under adaptive navigation system control.
Текст научной статьи Теоретическое обоснование адаптивной структуры системы автономной наземной навигации специального транспортного средства
В путевых автономных наземных навигационных системах специальных транспортных средств используются для измерения навигационных параметров, помимо основного, несколько дополнительных измерителей. В качестве таковых могут применяться инерциальные и электронно-механические высокоточные измерители. Использование дополнительных аппаратных средств наряду с программными делает возможным синтезировать адаптивную структуру автономной системы наземной навигации (СНН).
Под адаптацией понимается изменение параметров или структуры системы, а в некоторых случаях и управляющих воздействий, на основе текущей информации, получаемой при оценивании и прогнозировании состояний, с целью достижения определенного, обычно оптимального, состояния системы при начальной неопределенности и изменяющихся условиях работы. Адаптация допускает изменение параметров системы или ее структуры, а также учитывает управляющие воздействия на основе текущей информации от внутренних и/или внешних источников [1–3].
Для навигационных систем эффективным способом повышения безотказности и точности при эксплуатации является применение принципа автоматического управления состоянием систем. Автоматическая навигационная система включает
в свой состав устройство, выполняющее оценивание и прогнозирование состояния систем измерения, принятие решения и управление состоянием систем с целью их повышения безотказности и точности.
Управление состоянием навигационных систем с целью повышения их точности и безотказности должно быть адаптивным, т.е. их изменение следует производить на основе принципа адаптации для управления безотказностью, точностью, работоспособностью и качеством функционирования.
Адаптивное управление состоянием систем включает в себя [4, с. 103]:
-
- оценивание текущего состояния системы;
-
- прогнозирование состояния системы;
-
- принятие решения на изменение структуры и состояния системы;
-
- выработку способа и закона управления системы;
-
- целенаправленное изменение состояния системы в соответствии с принятым решением и разработанным законом управления.
Основными задачами оценивания состояния систем измерения являются определение работоспособности, точности, поиск и обнаружение неисправностей в системе.
Под управлением состоянием динамических систем понимается целенаправленный процесс изменения параметров (структуры) системы, а также управляющих воздействий с целью предупреждения и устранения отказов системы и достижения ею оптимального качества функционирования. Управление состоянием динамических систем с целью повышения их точности и безотказности можно выполнить тремя способами:
-
1) изменением структуры системы;
-
2) изменением параметров системы;
-
3) выработкой дополнительных входных (управляющих) воздействий.
В обобщенном виде структурная схема адаптивной автоматической системы измерений навигационных параметров представлена на рис. 1.
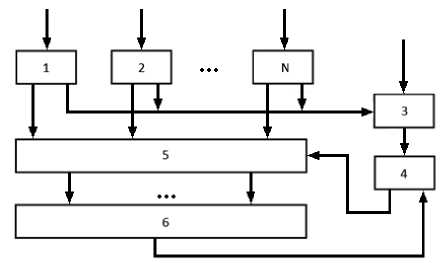
Рис. 1. Структурная схема адаптивной системы измерений
В состав системы входят: измерители входной информации (датчики информации) 1, 2, .„, n ; блок анализаторов 3; синтезатор 4; коммутатор 5; вычислительное устройство 6.
Датчики информации измеряют навигационные параметры СТС и передают ее в устройство обработки. В качестве измерителей используются датчики, основанные на различных физических принципах определения параметров движения: механический датчик пути/скорости (МДП/МДС), доплеровский датчик скорости (ДДС), измеритель линейных ускорений (акселерометр), оптоэлектронный датчик скорости (ОЭДС) и др.
Анализатор 3 является сложной частью системы, выполняет разнообразные функции и в своем составе содержит устройства оценивания состояния систем измерения и автоматического поиска неисправных блоков. Он имеет входы, связанные как с системами контроля блоков устройства, так и с внешними источниками информации.
Синтезатор 4 предназначен для выработки и принятия решения на проведение необходимых настроек параметров или реконфигурацию структуры системы измерения с целью устранения отказов и обеспечения заданного качества функционирования измерительной системы. В состав синтезатора входят следующие устройства: сравнения, логическое и принятия решений.
Коммутатор 5 предназначен для включения измерительных элементов, соответствующих условиям функционирования СТС.
Вычислительное устройство 6 служит для выполнения математической обработки результатов измерений.
В основу построения адаптивной структуры СНН должны быть положены следующие основные принципы: возможность решения задачи в условиях неопределенности и недетерминированности; иерархичность и строгая соподчиненность различных операций; наличие функционального взаимодействия элементов; адаптивность и самообучаемость; логическая обусловленность и др.
Синтез адаптивной структуры СНН включает следующие четыре этапа.
-
1. На первом этапе необходимо определить, какие факторы влияют на качество функционирования автономной СНН. К внутренним факторам можно отнести работоспособность и точность работы устройств СНН. К внешним – факторы, которые создают неблагоприятные условия функционирования СТС, такие как наличие на дорожном покрытии воды, льда, свежего снега и пр. В этих условиях при работе одного из высокоточных измерителей, например ОЭДС, при освещении его минипрожекторами дорожного покрытия отраженные сигналы от неоднородностей покрытия, воспринимаемые датчиками первого и второго каналов, могут быть либо слабыми, либо совсем отсутствовать.
-
2. На втором этапе проводится выбор диапазонов скоростей, в которых должны функционировать те или иные датчики скорости и ускорений, входящие в состав СНН. Например, при скорости движения СТС менее 5 км/ч не используют ДДС, а применяют акселерометр, что позволяет обеспечить более высокую точность измерений и т.д.
-
3. На следующем этапе формируется функция состояний устройства, которую можно записать в следующем виде:
-
4. Следующий этап заключается в составлении системы логических уравнений в соответствии с логикой работы устройства. На основании логики работы устройства для определения уточненного расстояния, пройденного СТС, решается система математических уравнений и определяются поправочные коэффициенты для подкалибровки значений измерения МДС.
С целью упрощения алгоритмов оценивания и прогнозирования состояния СНН выбирают наиболее существенные факторы, которые оказывают наибольшее влияние на качество работы системы.
F = f ( t , xi , A ВК , V ), (1) г д е t – время; xi – состояние датчиков скорости и ускорений СТС ( х исправен, x неисправен, погрешности измерений в допуске или нет I = 1… n ); A ВК – внешняя информация об условиях функционирования устройства ( k = 1…8); V – скорость движения СТС.
Представлена структурная схема адаптивного устройства (рис. 2) для автономного определения расстояния, пройденного СТС [5].
ВЕСТНИК РОСНОУ. Серия «Сложные системы…»
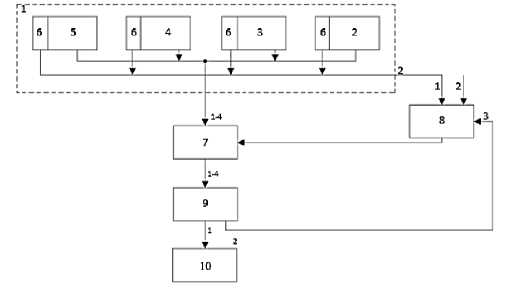
Рис. 2. Структурная схема адаптивного устройства путевой СНН СТС
Устройство содержит: блок измерителей (ИС) – 1, который включает в свой состав следующие устройства: механический датчик скорости МДС – 2; акселерометр – 3; доплеровский датчик скорости ДДС – 4; оптоэлектронный датчик скорости ОЭДС – 5; системы контроля датчиков СК – 6; коммутатор – 7; блок анализа БА – 8; определитель скорости и расстояния ОР – 9; блок индикации ИНД – 10. Блок измерителей, включающий четыре измерителя, позволяет получить более точную информацию после ее обработки о пройденном СТС расстоянии.
Для обработки поступающей информации используется специальный блок – блок анализа условий функционирования, который управляет работой коммутатора 7, в зависимости от внешних условий работы СТС и внутреннего состояния устройства. Для этого блок БА имеет специальные входы, на которые поступает как информация от систем контроля всех измерителей, так и команды от внешних источников, задаваемых в виде кодов. Кроме этого, на отдельный вход блока БА поступает информация от блока определителя скорости и расстояния о значениях погрешностей измерителей, т.е. в допустимых пределах находятся они или нет.
Блок анализа представляет собой цифровой автомат с памятью, имеющий N входов y 1 …yn ; L – внутренних переменных xi и К выходов z 1 … zk , обеспечивающий оптимальное функционирование устройства.
Определитель скорости и расстояния имеет в своем составе арифметикологическое устройство, счетчик интервалов измерений, устройство форматирования информации.
Блок индикации отображает полученные результаты измерений пройденного СТС расстояния.
Устройство работает следующим образом. В начале движения после любой остановки СТС блок анализа 8 вырабатывает сигналы в соответствии на данный момент с ситуацией, задаваемой внешними командами (ВК) в виде кодовых комбинаций, поступающей на его входы, например движение СТС по маршруту со скоростью менее или более 5 км/ч, движение по контрольному участку, все датчики скорости исправны или какой-то из них неисправен, допустимо ли генерирование радиочастот во время работы датчика ДДС и т.д. Таким образом, функцию состояний устройства можно записать в следующем виде:
F = f ( xp C j , A вк , V ), (2) где хi – состояние датчиков скорости и ускорений (исправен, неисправен, погрешности измерений в норме или нет, i = 2…5), cj – показания систем контроля датчиков ( j = 1…4), A ВК – внешние команды; V – скорость движения СТС.
Представлены следующие комбинации возможных воздействий внешних и внутренних факторов, определяющих различные состояния СТС.
-
А. Скорость движения V < 5 км/ч.
-
1. Результаты измерений датчиками 2, 3, 5 совпадают, т.е. x 2 = x 3 = x 5 .
-
2. Результат измерений датчика 5 не совпадает с остальными, но его погрешность в пределах нормы, т.е. x2 = x3 ^ x5._
-
3. Погрешность измерений датчика 5 выше нормы, т.е. x 2 = x 3 ^ x 5 .
-
4. Не совпадает результат измерений датчика 3, но его погрешность в пределах нормы, т.е. x2 = x5 ^ x3._
-
5. Погрешность измерений датчика 3 выше нормы, т.е. x 2 = x 5 ^ x 3 .
-
Б. Скорость движения V > 5 км/ч.
-
1. Результаты измерений датчиками 2, 4, 5 совпадают, т.е. x 2 = x 4 = x 5 .
-
2. Результат измерений датчика 5 не совпадает с остальными, но его погрешность в пределах нормы, т.е. x2 = x4 ^ x5._
-
3. Погрешность измерений датчика 5 выше нормы, т.е. x 2 = x 4 ^ x 5 .
-
4. Не совпадает результат измерений датчика 4, но его погрешность в пределах
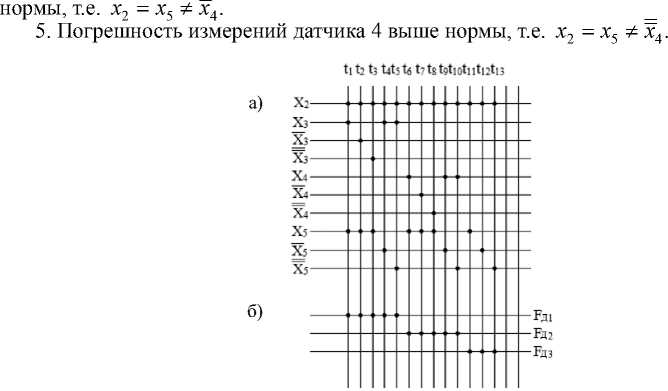
Рис. 3. Реализация булевых функций на матрицах ПЛМ: а) матрица И, б) матрица ИЛИ
Матрица И формирует термы 1 1 , 1 2 , .„ 1 13 (рис. 3). Матрица ИЛИ формирует выходы БА F Д1... F Д3 , соответствующие состоянию движения СТС, и F П4 _ F П6 , соответствующие профилактическому обслуживанию [6, с. 86]:
F Д1 = x 2 x 3 x 5 v x 2 x 3 x 5 v x 2 x 3 x 5 v x 2 x 3 x 5 v x 2 x 3 x 5 ,
F д2 = x 2 x 4 x 5 V x 2 x 4 x 5 V x 2 x 4 x 5 V x 2 x 4 x 5 V x 2 x 4 x 5 ,
F Д3 = x 2 x 5 v x 2 x 5 v x 2 x 5 ,
F П4 = x 2 x 3 x 5 v x 2 x 3 3 x 5 v x 2 x 3 3 x 5 v x 2 x 3 x 5 v x 2 x 3 x 5 ,
F П5 = x 2 x 3 x 5 V x 2 x 3 x 5 V x 2 x 3 x 5 V x 2 x 3 x 5 V x 2 x 3 x 5 ,
FП6 = x2 x5 v vx2 x5 v x2 x5, где F 1 F6 - состояния устройства, определяемые информацией на входах 1, 2, 3 БА; x2 - исправное состояние МДС; x3 - акселерометр исправен; x3 - акселерометр неисправен, погрешность в пределах нормы; X3 - погрешность выше нормы; x4 - ДДС исправен; X4 - ДДС неисправен, погрешность в пределах нормы, X4 - погрешность выше нормы; x5 - ОЭДС исправен; X5 - ОЭДС неисправен, погрешность в пределах нормы; X5 - неисправен, погрешность выше нормы.
В блоке 9 происходит математическая обработка принятой из коммутатора 7 информации в соответствии с системой уравнений (4):
U 1 = ( У 2 + У 3 + У 5)/3 V ( у 2 + у 3 + у 5)/3 V
v ( у 2 + у 5 ) / 2 V ( у 2 + у 3 + у 5 ) / 3 V ( у 2 + у 3 ) / 2 ,
U 2 = ( у 2 + у 4 + у 5)/3 V ( у 2 + у 4 + у 5)/3 V
-
V ( у 2 + у 5)/2 V ( у 2 + у 4 + у 5)/3 V ( у 2 + у 4)/2,
U 3 = ( у 2 + у 5)/2 V ( у 2 + у 5)/2 , (4)
U 4 = ( у 2 + у 3 + у 5)/3 V ( у 2 + у 3 + у 5)/3 V
-
V ( у 2 + у 5 ) / 2 V ( у 2 + у 3 + у 5 ) / 3 V ( у 2 + у 3 ) / 2 ,
U 5 = ( у 2 + у 4 + у 5)/3 V ( у 2 + у 4 + у 5)/3 V
-
V ( у 2 + у 5)/2 V ( у 2 + у 4 + у 5)/3 V ( у 2 + у 4)/2 ,
U 6 = ( у 2 + у 5)/2 V ( у 2 + у 5)2
где Ui – усредненная информация о скорости движения СТС с учетом внешних и внутренних условий функционирования ( i = 1…6); yj – информация о скорости движения СТС, поступающая от датчиков скорости и ускорения ( j = 2…5).
Для выработки информации о скорости и пройденном СТС расстоянии в блоке определения скорости и расстояния имеются арифметико-логическое устройство, в котором производится обработка информации, представленной системой уравнений 4, счетчик интервалов, в котором производится суммирование количества интервалов измерений и суммирование отрезков пути, проходимых СТС.
Необходимая информация из блока ОС и Р подается в БА, например информация о скорости движения CТС для ее сравнения с фиксированной константой, хранящейся в БА. В зависимости от результатов сравнения в БА вырабатывается соответствующая команда. Разность между показаниями МДС и значениями усредненной скорости движения СТС в виде поправочных коэффициентов фиксируется в устройстве и используется для подкалибровки значений МДС при определении пройденного расстояния.
Таким образом, с применением АСНН повышается точность измерения расстояния, проходимого СТС, на основе анализа информации от высокоточных датчиков скорости и ускорений устройства, их систем контроля, учета условий функционирования СТС и автоматической коррекции единичного приращения пути в зависимости от условий движения.
Список литературы Теоретическое обоснование адаптивной структуры системы автономной наземной навигации специального транспортного средства
- Козеев В.А. Повышение безотказности и точности нелинейных систем управления. Л.: Энергоатомиздат, 1985. 127 с.
- Лупанчук В.Ю., Кулешов В.В., Гончаров В.М. Пути снижения погрешностей в системе наземной навигации специального транспортного средства. Известия ТулГУ, техн. науки, вып. 4. Тула: ТулГУ, 2018. С. 56-72.
- Лупанчук В.Ю. Применение мультирадикальной интеллектуальной навигационной системы при определении местоположения группировки роботов // Нейрокомпьютеры и их применение: XVI Всероссийская научная конференция: сб. тез. докладов. М.: МГППУ, 2018. С. 268.
- Лупанчук В.Ю., Гончаров В.М. Способ обработки информации в комплексированной системе наземной навигации специального транспортного средства. Известия ТулГУ, техн. науки, вып. 4. Тула: ТулГУ, 2018. С. 102-114.
- Кулешов В.В., Макаров В.А., Орлов И.Н. Патент РФ 2584794 G01C22/00 «Устройство для определения расстояния, пройденного наземным транспортом». Заяв. 01.29.2015. Опубл. 20.05.2016.
- Согомонян Е.С., Слабаков Е.В. Самопроверяемые устройства и отказоустойчивые системы. М.: Радио и связь, 1989. 207 с.
