Time dependence of the output signal morphology for nonlinear oscillator neuron based on van der pol model

Author: Vasyl Lytvyn, Victoria Vysotska, Ivan Peleshchak, Ihor Rishnyak, Roman Peleshchak
Journal: International Journal of Intelligent Systems and Applications @ijisa
Article in issue: 4 vol.10, 2018.
Free access
Time-frequency and time dependence of the output signal morphology of nonlinear oscillator neuron based on Van der Pol model using analytical and numerical methods were investigated. Threshold effect neuron, when it is exposed to external non-stationary signals that vary in shape, frequency and amplitude was considered.
Nonlinear oscillator neuron, frequency modulation, morphology of the information signal, resonance effect, encoding and decoding of information
Short address: https://sciup.org/15016476
IDR: 15016476 | DOI: 10.5815/ijisa.2018.04.02
Text of the scientific article Time dependence of the output signal morphology for nonlinear oscillator neuron based on van der pol model
Published Online April 2018 in MECS DOI: 10.5815/ijisa.2018.04.02
At present, intensive research on the application of neural networks is being conducted to solve a wide range of Data Mining tasks (identification of non-stationary chaotic processes, clusterization, classification, intellectual management, biosystems states diagnostics, prediction, emulation and recognition of multispectral input images). Considerable interest in the study of modern neurodynamics lies in the processes of information encryption, decryption and processing that is transmitted by neurons. In the early stages of sensory information processing Wavelet analysis is an effective tool to study the information component of the neural signals that are registered. Traditionally such research demands to analyze the structure of point processes, i.e. the time-frequency dynamics analysis of neural reviews [1]-[6], in which information carriers are times of pulses (spikes) generating, but not their form [7]. The mechanisms that lead to the spikes generation are partially known [8]. But how neurons and their ensembles transmit information about around world, so far has practically been unexplored.
In the wavelet-neurophase network, the waveletneuron is structurally close to the standard formal neuron with N inputs, but instead of the usual synaptic weights λ , there are wavelet-synaptic weights λWSi (i= 1,2,..., N) , in which the adjustable parameters are not only the weights λ , but also the scaling and offset wavelets. It should be noted that in all of the abovementioned artificial neural networks, neurons were considered without their own dynamics (their own frequency of oscillations of the neuron ω = 0 ) and without taking into account the accumulation of impulses N in the neurons that triggered when N≥ N (N is the threshold value of the k-th neuron pulses). The main advantages of self-developing artificial nonlinear neural networks is the ability to adapt to dynamic conditions and the speed of functioning, which is especially important when operating in real-time. In order to provide the highest class of efficiency (speed of operation) and the quality of the recognition of input spectral images, it is proposed to develop the architecture of self-developing artificial nonlinear neural networks and an algorithm for their training based on evolutionary simulation methods that can adapt to dynamic conditions when working in real-time.
Accordingly, to above-mentioned there is necessity to solve the following problems:
-
• It is necessary to suggest the method of inhomogeneous nonlinear differential equations with quadratic non linearity of the unknown function at the first derivative.
-
• It is necessary to define that nonlinear oscillator neuron can act as a frequency modulator, which can modulate the input information of non-stationary signal.
-
• It is necessary to determine that nonlinear oscillator neuron with threshold effect significantly alters the structure of the input information non-stationary signal different in shape, frequency and amplitude.
-
• It is necessary to determine the existence of resonance effects in nonlinear oscillator neuron when frequency of the external non-stationary signal and dynamics of the natural frequency of the neuron are equal.
-
• It is necessary to suggest information coding with nonlinear oscillator neuron on the basis of frequency modulation and decoding using an inverse operator, which acts on the output signal vector.
-
II. Related Works
In [2], [3], [6], the authors analyzed the case of signals conversion by sensory neurons (threshold device), but its own dynamic neuron was not taken into consideration. Using classical models threshold systems such as “integrate-and-fire” [2] and “threshold crossing” [3], [6], it has been shown that various characteristics of complex dynamics at the entrance sensory neuron are stored in the point process structure [2]-[6], [9]-[11], [17]-[33].
Computer neurons dynamics modeling when exposed to constant external signal was conducted in Van der Pol approaching [12]. The authors [13] investigated frequency-temporal dynamics of sensory neuron (threshold device) using the technology of double wavelet analysis and taking into account the interaction of its own dynamics and the dynamics that was caused by the influence of external non-stationary signal. In this sensory neuron was modeled as a threshold device that converts the input signal to pulse sequence output. This pulse sequence was described by the sequence of Dirac delta functions, each of which corresponds to the pulse (adhesions) generation moment. These model pulses have the same shape and amplitude, that’s why information about the external effect of dynamic signal appears only in the time intervals between the moments of their generation.
-
III. Setting Objectives
The aim of this work is to study the analytical and numerical method of time-frequency and timedependence of the output signal morphology for nonlinear oscillator neurons based on Van der Pol model taking to account threshold effect neurons when it is exposed to different in shape, frequency and amplitude of external non-stationary signals.
-
IV. Mathematical Model
Nonlinear oscillator sensory neuron type Van der Pol (threshold device) with its own dynamics ^k, which can generate pulses in the absence of external non-stationary signals (Vk (t) = 0), when the number of available sensory neuron impulses N reaches a threshold value N (Nok > Nck)was considered. Thus, such neuron can be considered as a threshold device that converts the input non-stationary signal V(t) into a sequence of pulses output (Fig.1) due to the “imposition” of the dynamics of input non-stationary signal V(t) on its own neuron dynamic. Consequently, the signals conversion process analysis by nonlinear oscillator sensory neuron is complicated. The complex dynamics of transformation of input non-stationary signal received by biological sensor with its own dynamics shows an experimental record signal (Fig.1b) [13]-[16]. This signal generated by a biological neuron without external signal action (interval 0< t <110s with a low-δ-pulse sequence). At the time interval 110s< t <200s shown on (Fig. 1b) the result of external signal interaction with the biological sensor with its own dynamics which leads the formation of high-order δ-pulses sequence.
To illustrate, let us consider encoding information by touch nonlinear oscillator k-neuron which describes the nonlinear equation of the form
X k + ^ .[ X 2 - p .N 0 k ; V . )] Xk + ^QkXk = Vk ( t ) (1)
where p2(N0k;Nck) = p2k tanh(N0k 2Nck)- setting the ^k amplitude of the k-th neuron; ^ > 0 ;
Nok , Nck , a2 are the number of pulses that come to k -th neuron, threshold pulse k -th neuron and variance respectively;
to 2 is natural frequency k -th nonlinear oscillator neuron;
V(t) is non-stationary input signal goes to k-th neuron.
Nonlinear oscillator neuron has its own dynamics and generates pulses in the absence of external signals at Nk > Nck , because under this condition tanh( N0k 2Nck-) > 0 and accordingly p2 (N0k; Nck ) > 0 ak
-
[14] . Mathematical model (1) can also be used to study the collective behavior of ensembles of neurons interconnected synaptic connections Xjk . For this purpose the second and third terms are necessary to replace N
Xk ^ X where X . = Xk + £^ X , ; a = 1,2,...,N.
j = 1
Solution to equation (1) with the analytical numerical method and consistent approximation method in the form
X kn ) ( t ) = a kn ) ( t )sin ^ kn )(t ) (2)
where n = 1, 2, 3, …, N is an iteration number;
^ <" ) ( t ) = ^ 0 k t + ^ < n ) ( t ) (3)
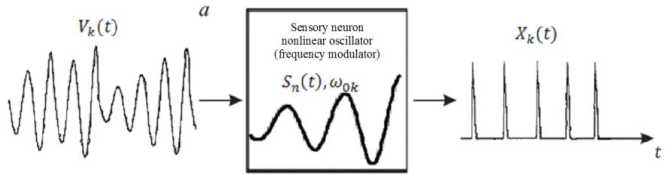
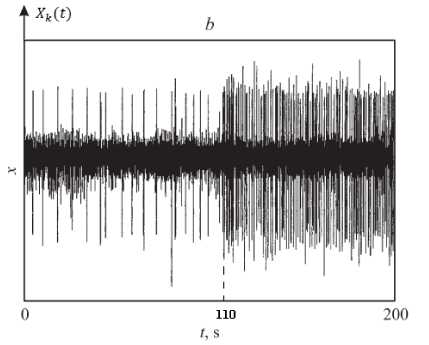
Fig.1. a – Schematic representation of process for the input signal V ( t ) conversion by non-linear oscillator sensory neuron (threshold device). Pulses generating times on the output of threshold device X ( t ) correspond to the crossing moments of the threshold level; b – An experimental sample recording of signal which is generated by biological neurons [13].
akn ) ( t ) and ф\n ) ( t ) - functions of time, which are selected so that the ratio (2) satisfies the equation (1). In addition we impose the condition that a ( n ) ( t ) is a slowly variable function, i.e.
lim a kn) ’ ( p k " ) = 1. t ^” a n )( Pkt )
function. We demand that the condition was fulfilled
X k n ) = « k 4n ) ( t ) cos w k n )( t ) (5)
where X ( n ) = dX311 , k dt
Substituting (2) in (1) and given the condition (5) we obtain the system of equations akn) (t) and Vkn) (t) :
But since there are two functions a(kn) (t) and Vkn) (t), and one equation, this condition ambiguous defines the da" / t) = - akn-1) (t) Pk [(akn-1) )2 sin2 vkn-1) (t)- pk(Nо k; Nek) ] cos2 vkn-1) (t)+Vk(t)cos vkn-1) (t)
dt dv, (t) = ®ok+ Pk [(akn-1) )2 sin2 vkn-1) (t)- pk(Nоk; Nek)] sin vkn-1) (t)cos vkn-1) (t) - Vk (t)8™1Гk- (t)
The right side of the equation system (6) for the period 2n at V ( t ) = 0 for the rule [15] was averaged:
<Ф>= ^i2" Ф(vkn)) dvkn).(7)
2 n 0
In zero approximation expressions for a (0) ( t ) and V^Xt ) are found from the system of equations:
da^ = A(ak°4t)), dvk^)(t) = B (a*0)( t))(8)
dtdt
/ (0) 22 where A(ak")(t)) = -a^(t)рАI V-^- — pr I,B(a'k°(.t)) = «оk•
I 82
Integrating the equation (8), a zero approximation expressions for a(0) (t) and Vk^ (t) were worked out:
ak0)( t) = ■ 2 P\ ,(9)
V1 + e"Pk P kt
Vk'(t) = «0 kt(10)
where a (0) ( t ) satisfies the criterion (4) of slowly variable function. To find expressions a (1)( t ) and Vk 1 (t ) in the first approximation ( n = 1) we should substitute the expression (9), (10) into the system of equations (6). As a result of integrating we obtain first approximation expressions for a (1)( t ) and ^(t ) . The process of iteration stops when the conditions are fulfilled:
to the operator activation f (fig.2). For nonlinear oscillator sensory neuron activation operator f looks like, this input operator fa = £ + ^k [X'k - P2(N0к; Nck)] d + -. (14) dt2 dt g^( t) - ak f t) ak(n)(t)
<< 1,
vnt ) v k л t ) v k n)( t )
<< 1.
V. Results
For modeling example, in this problem external non-stationary signal V ( t ) is chosen as a sum of N ordinary non-stationary signals, each of which is centered at the point t = tL and characterized by system parameters L [16]
N - 1
V k (t ) = Z A ( t - t L ) + A) k . (11)
L = L 0
By selecting system parameters L, we can to construct mathematical models of complex non-stationary signal V ( t ), spectral properties of which change over time. The mathematical model of unsteady external signal V ( t ) will reflect the dynamics of the real signal that characterizes a physical (biological) process.
An example of a simple non-stationary signal vLк (t - tL ) is an expression:
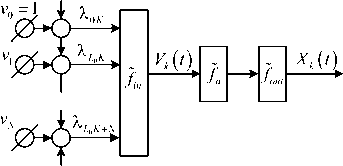
Fig.2. The structure of artificial nonlinear oscillator neuron
v Lk ( t - t L ) = ---- -exp
—
( t - t L ) 2 T
cos( ^ ( t - tL ) + a ),
The output signal of nonlinear oscillator neuron X ( t ) (Fig.2) is transformed by the source operator f the output signal of service activation. Output operator f is required to represent the state of the neuron in the desired field values. In most studies, this operator is not isolated, and under output signal the neuron to understand the signal after activation operator f . However, during the analysis and synthesis of artificial neural networks (ANN), which have different activation functions of the various regions and areas of value determination, is necessary taking into account the output operator. Consequently, nonlinear operator transformation of input signals V ( t ) vector in the vector output signal X ( t ) can be written as
X k ( t ) = L ( f a ( L (V k (t ), A ))). (15)
which is a product of the envelope Hauss form to oscillating function and is described by five parameters L
L ( A Lk , ^ L , t L , T L a L ) (13)
By selecting different combinations of
L = (A^ ,^, tT ,t ,a ), we can construct a theoretical Lk L L L L model that adequately describes the real physical (biological) processes in the interaction of external non-stationary signal V(t) with its own dynamic physical (biological) nonlinear neuron.
where Ak denotes weight connections of inputs v 1 ,^, v N of the k -th neuron; Ak is weight shift signal of communication with the k -th neuron; ^ = 2 nfL is external carrier frequency oscillation in hertz (Hz), t is center localization signal by the time in seconds, tl is typical localization signal time interval in seconds, a is the initial phase in radians.
Equation (11) with (12) describes all inputs, including offset signal, coming with weights Ak the adder k -th neuron (incoming operator f ). Input operator f converts weighted weights A inputs and presents them
-
VI. Discussion
Figs. 3-4 shows a first term (N = 1) non-stationary external signal V ( t ) ((11), (12)) depending on the time
ALk vl (tt-tL ) =----h^exp
L 0 k L 0 2 т ол/ П
—
( t - t i p )2 4r 2
L 0
cos( ^ L 0 ( t - t L ) + a L ),
applied to nonlinear oscillator sensory neuron for two parameter values Lo: Lo = (3, 4 П, 12, 3, 0); Lo = (1, 6n, 21, 1, 0) in accordance. In the first case the signal v^o^(t - tLo) (Fig.3) has an amplitude Aok = 3, and the second – λ = 1 respectively, in the first case, the signal the initial phase α =0, and the second – f =3Hz; has a frequency f = 2Hz, centered at a point in time t =21s, τ =3s; α =0.
t =12s with time-lapse localization signal τ =3s and
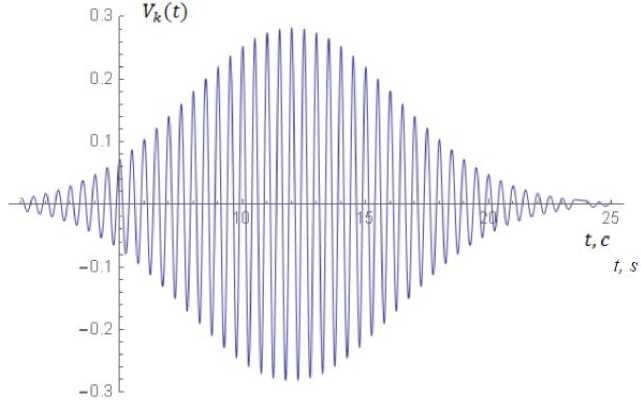
Fig.3. Morphology of the external information signal v ( t - t ) (16) with parameter values L = (3, 4 π , 12, 3, 0); p = 0.4 and µ = 0.1 .
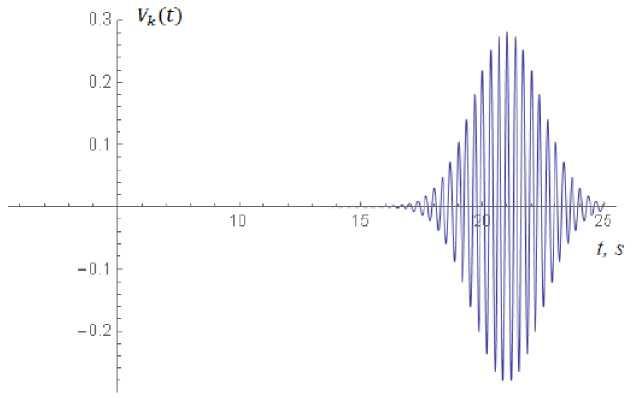
Fig.4. Morphology of the external information signal v ( t - t ) (16) with parameter values L 0 = (1, 6 π , 21, 1, 0); p k =0.4 and µ = 0.1 .
In numerical calculations, signals X ( t ) the output of the nonlinear oscillator neuron with input signals (Figs. 34) parameters p = 0.4 and µ = 0.1 match.
Figs. 5-6 present graphs of frequency modulation dψ(n) (t)
ω(n) = k , which changes the instantaneous k dt
(11), which consists of a simple non-stationary signal v ( t - t ) (16), in accordance with a change in signal caused by the interaction of an external signal carrying information with its own dynamics ω = 0.2 π (Fig. 5) and ω = 2 (Fig. 6) nonlinear oscillator neuron.
frequency of the carrier oscillation information V ( t )
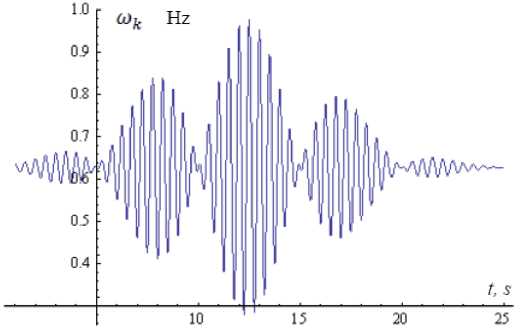
Fig.5. The time dependence of the instantaneous frequency of the carrier signal information v^(tt - tL ) (16) with parameter values Lo = (3, 4 n , 12, 3, 0); pk = 0.4 and ^ = 0.1 , шок = 0.2 n .
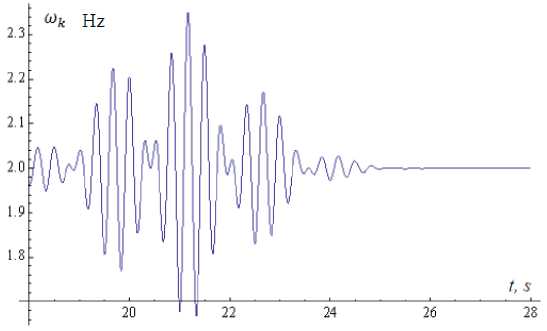
Fig.6. The time dependence of the instantaneous frequency of the carrier signal information v^ t( t - tL ) (16) with parameter values L 0 = (1, 6 n ,21,1,0) ; pk = 0.4 and p k = 0.1 , ® 0 k = 2
Figs. 7-8 present graphs of morphology signal at the output of the nonlinear oscillator neuron X(t) defined by the nature of the interaction of dynamics neuron with frequencies юйк = 0.2n; <УМ = 2 and dynamic, caused by external influence v, , (t -t, ) (16).
L 0 k L 0
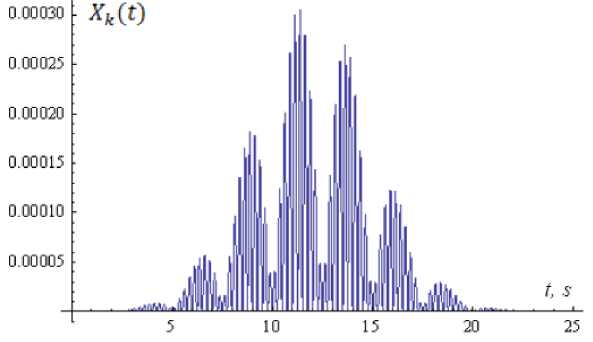
Fig.7. Schedule of morphology signal at the output of the nonlinear oscillator neuron X ( t ) with parameter values
L o = (3, 4 n , 12, 3, 0); pk = 0.4 and ^ = 0.1 , ^k = 0.2 n .
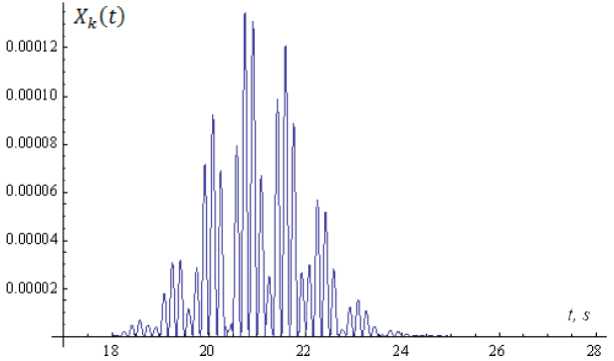
Fig.8. Schedule of morphology signal at the output of the nonlinear oscillator neuron X ( t ) with parameter values
L 0 = (1, 6 п , 21,1,0) ; pk = 0.4 and ц к = 0.1 , ® 0 k = 2 .
Figs. 9-10 present graphs of morphology signal at the output of the nonlinear oscillator neuron X(t), defined by the nature of the interaction of dynamics neuron with frequencies юйк = 0.2n; <УМ = 2 and dynamic, caused by external influence v, , (t -t, ) (16).
L 0 k L 0
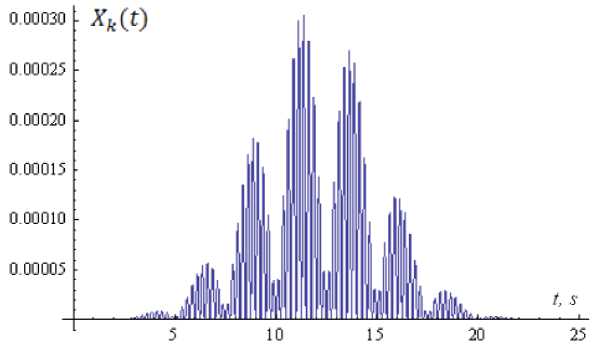
Fig.9. Schedule of morphology signal at the output of the nonlinear oscillator neuron X ( t ) with parameter values
L = (3, 4 n , 12, 3, 0); pk = 0.4 and ^ = 0.1 , took = 0.2 n .
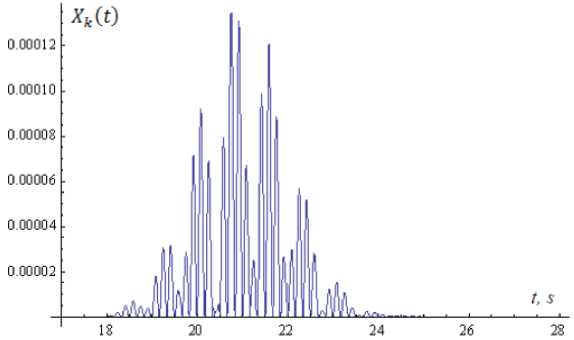
Fig.10. Schedule of morphology signal at the output of the nonlinear oscillator neuron X ( t ) with parameter values
L 0 = (1, 6 n , 21,1,0) ; pk = 0.4 and ц к = 0.1 , ® 0 k = 2 .
The interaction of external signal v (t - t ) with parameters L = (3, 4 π , 12, 3, 0); L = (1, 6π, 21, 1, 0) with its own dynamics of nonlinear oscillator neuron ω= 4π or ω= 6π a sharp increase in the amplitude of the output signal X(t) (Fig. 11) compared to the output signal in Fig.9. That is a resonance effect in the external signal frequency which matches the natural frequency of oscillation of the nonlinear neuron, (ω= ω). Graph of modulation frequency ω(n) (t) if a resonance effect is shown in Fig.12.
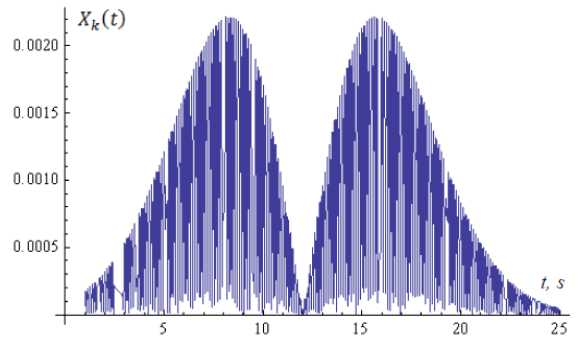
Fig.11. Schedule of morphology signal at the output of the nonlinear oscillator neuron X ( t ) if a resonance effect with parameter values L = (3, 4 π , 12, 3, 0); p = 0.4 and µ = 0.1 , ω = 4 π .
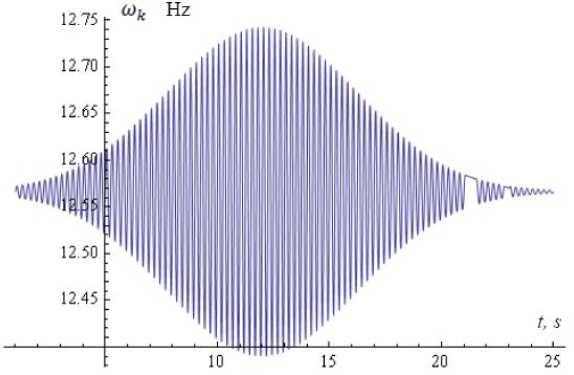
Fig.12. The time dependence of the instantaneous frequency of the carrier signal information v ( t - t ) (16) if a resonance effect with parameter values L = (3, 4 π , 12, 3, 0); p = 0.4 and µ = 0.1 , ω = 4 π .
To decode the structure of output signal X ( t ) , it is important to know the code of program, which describes the inverse operator acting on a vector output, i.e.
f in - 1( f a - 1( f o - u 1 t X k ( t ))) = V k ( t , λ Lk ). (17)
Thus, the received results allow hypothesizing that the process of encoding information of nonlinear neurons can be considered in terms of modulation frequency as we know in radio physics that modulation frequency is one way of information transmitting.
-
VII. Conclusions
The method of inhomogeneous nonlinear differential equations with quadratic non linearity of the unknown function at the first derivative was suggested.
It was defined that nonlinear oscillator neuron can act as a frequency modulator, which can modulate the input information of non-stationary signal.
It was determined that nonlinear oscillator neuron with threshold effect significantly alters the structure of the input information non-stationary signal different in shape, frequency and amplitude.
The existence of resonance effects in nonlinear oscillator neuron when frequency of the external non-stationary signal and dynamics of the natural frequency of the neuron are equal is determined.
Information coding with nonlinear oscillator neuron on the basis of frequency modulation and decoding using an inverse operator, which acts on the output signal vector were suggested.
References Time dependence of the output signal morphology for nonlinear oscillator neuron based on van der pol model
- T. Sauer, “Reconstruction of dynamical systems from interspike intervals.” Phys. Rev. Lett., Vol. 72, pp. 3811-3814, 1994.
- D.M. Racicot, A. Lonytin, “Interspike interval attractors from chaotically driven neuron models.” Physic D., Vol. 104, pp. 184-204, 1997.
- R. Castro, T. Sauer, “Correlation dimension of attractors through inters pike intervals.” Phys. Rev. E., Vol. 55, pp. 287-290, 1997.
- T. Sauer, “Nonlinear Dinamics and Time Series.” Eds C. Culter and D. Kaplan, Fields Institute Communications. American Math. Society, Providence, RI, Vol. 11, pp. 63-75, 1997.
- R. Hegger, H. Kantz, “Embedding of sequences of time intervals.” Europhys. Lett., Vol. 38, pp. 267-272, 1997.
- R. Castro, T. Sauer, “Chaotic Stochastic Resonance: Noise-Enhanced Reconstruction of Attractors.” Phys. Rev. Lett., Vol. 79, pp. 1030-1033, 1997.
- A. Pavlov, A. Khramov, A. Koronovskyy, E. Sytnykova, V. Makarov, A. Ovchynnykov, “Veyvlet-analyz v neyrodynamyke.” Uspekhy fyzycheskykh nauk, Vol. 182(9), pp. 905-939, 2012.
- H.C. Tuckwell, “Introduction to Theoretical Neurobiology.” Cambridge University. Press, Cambridge, 1998.
- N. Janson, A. Pavlov, A. Neiman, V. Anishchenko, “Reconstruction of dynamical and geometrical properties of chaotic attractors from threshold-crossing interspike intervals.” Phys. Rev. E., Vol. 58, pp. R4-R7, 1998.
- A. Pavlov, O. Sosnovtseva, E. Mosekilde, V. Anishchenko, “Extracting dynamics from threshold-crossing interspike intervals: Possibilities and limitations.” Phys. Rev. E., Vol. 61, pp. 5033-5044, 2000.
- A. Pavlov, O. Sosnovtseva, E. Mosekilde, V. Anishchenko, “Chaotic dynamics from interspike intervals.” Phys. Rev. E., Vol. 63, pp. 036205(5), 2001.
- S. John, Hooshang Hemami Bay, “Modeling of a Neural Generator with Coupled Nonlinear Oscillators.” IEE Transactions biomedical engineering, V.BME, Vol. 34(4), pp. 297-306, 1987.
- A. Pavlov, O. Pavlova, “Prymenenye veyvlet-analyza v yssledovanyyakh struktury tochechnykh protsessov.” Pysʹma v ZHTF, Vol. 32(21), pp. 11-17, 2006.
- V.Y. Suhakov, “Osnovy synerhetyky.”, Kyyiv, 2001.
- M. Boholyubov, Y. Mytropolskyy, “Asymptotychni metody v teoriyi neliniynykh rivnyan”, M.: Nauka, 1992.
- S.V. Bozhokyn, “Nepreryvnoe veyvlet-preobrazovanye y tochno reshaemaya modelʹ nestatsyonarnykh syhnalov.” ZHTF, Vol. 82(7), pp. 8-13. 2012.
- T. Basyuk, “The main reasons of attendance falling of internet resource.”, in Proc. of the X-th Int. Conf. Computer Science and Information Technologies, CSIT’2015, pp. 91-93, 2015.
- E. Burov, “Complex ontology management using task models.” International Journal of Knowledge-Based and Intelligent Engineering Systems, Amsterdam: IOS Press, Vol. 18(2), pp. 111-120, 2014.
- V. Lytvyn, V. Vysotska, L. Chyrun, L. Chyrun, “Distance Learning Method for Modern Youth Promotion and Involvement in Independent Scientific Researches.” in Proc. of the First International Conference on Data Stream Mining & Processing, DSMP, pp. 269-274, 2016.
- J. Chen, D. Dosyn, V. Lytvyn, A. Sachenko, “Smart Data Integration by Goal Driven Ontology Learning.” Advances in Big Data. Advances in Intelligent Systems and Computing, Springer, pp. 283-292, 2016.
- V. Lytvyn, V. Vysotska, O. Veres, I. Rishnyak, H. Rishnyak, “Classification Methods of Text Documents Using Ontology Based Approach.” Advances in Intelligent Systems and Computing, Vol. 512, Springer, pp. 229-240, 2016.
- V. Teslyuk, V. Beregovskyi, P. Denysyuk, T. Teslyuk, A. Lozynskyi, “Development and Implementation of the Technical Accident Prevention Subsystem for the Smart Home System.” International Journal of Intelligent Systems and Applications (IJISA), Vol. 10, No. 1, pp. 1-8, 2018.
- Zh. Hu, Ye.V. Bodyanskiy, O.K. Tyshchenko, and V.O. Samitova,"Fuzzy Clustering Data Given in the Ordinal Scale", International Journal of Intelligent Systems and Applications (IJISA), Vol.9, No.1, pp.67-74, 2017.
- Zh. Hu, Ye.V. Bodyanskiy, O.K. Tyshchenko, V.O. Samitova,"Possibilistic Fuzzy Clustering for Categorical Data Arrays Based on Frequency Prototypes and Dissimilarity Measures", International Journal of Intelligent Systems and Applications (IJISA), Vol.9, No.5, pp.55-61, 2017.
- Zh. Hu, Ye.V. Bodyanskiy, O.K. Tyshchenko, V.M. Tkachov, “Fuzzy Clustering Data Arrays with Omitted Observations”, International Journal of Intelligent Systems and Applications (IJISA), Vol.9, No.6, pp.24-32, 2017.
- Zh. Hu, Ye.V. Bodyanskiy, O.K. Tyshchenko, and V.O. Samitova,"Fuzzy Clustering Data Given on the Ordinal Scale Based on Membership and Likelihood Functions Sharing", International Journal of Intelligent Systems and Applications (IJISA), Vol.9, No.2, pp.1-9, 2017.
- J. Su, V. Vysotska, A. Sachenko, V. Lytvyn, Y. Burov, “Information resources processing using linguistic analysis of textual content.” in Proc. of the 9th IEEE International Conference Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Bucharest, Romania, pp. 573-578, 2017.
- V. Lytvyn, V. Vysotska, Y. Burov, O. Veres, I. Rishnyak, “The Contextual Search Method Based on Domain Thesaurus.” Advances in Intelligent Systems and Computing, Vol. 689, Springer, pp. 310-319, 2017.
- V. Pasichnyk,, T.Shestakevych, “The model of data analysis of the psychophysiological survey results.” Advances in Intelligent Systems and Computing, Vol. 512, pp. 271-281, 2017.
- P. Zhezhnych, O.Markiv, “Linguistic Comparison Quality Evaluation of Web-Site Content with Tourism Documentation Objects” Advances in Intelligent Systems and Computing, Vol. 689, pp. 656-667, 2018.
- O. Bazylyk, P. Taradaha, O. Nadobko, L. Chyrun, T. Shestakevych, “The results of software complex OPTAN use for modeling and optimization of standard engineering processes of printed circuit boards manufacturing” in Proceedings of the 11th International Conference TCSET'2012, pp. 107 – 108, 2012.
- A. Bondariev, M. Kiselychnyk, O. Nadobko, L. Nedostup, L. Chyrun, T. Shestakevych, “The software complex development for modeling and optimizing of processes of radio-engineering equipment quality providing at the stage of manufacture” in Proceedings of the 11th International Conference TCSET'2012, pp. 159, 2012.
- V. Riznyk, “Multi-modular Optimum Coding Systems Based on Remarkable Geometric Properties of Space” Advances in Intelligent Systems and Computing, Vol. 512, pp. 129-148, 2017.
