To geostationary collocation problem

Author: Kuprin A.G., Medvedev A.V.
Journal: Сибирский аэрокосмический журнал @vestnik-sibsau
Section: Математика, механика, информатика
Article in issue: 3 т.18, 2017.
Free access
This article is about geostationary collocation problem which means problem of cooperative station retention. As part of this task it is assumed that different control centers don’t exchange information about kinematic parameter’s vectors and maneuvers. So there is full information and control possibility for one collocation member only. Sets of kinematic parameter vectors are available for the other collocation members. This situation corresponds to lack of a priority information conditions, so there is f nonparametric uncertainty situation because due to absence of informa- tion on parametric control law which is used to choose maneuvers for other collocation members. Modern collocation theory doesn’t allow to avoid collision and process station retention in this condition. Synthesis of nonparametric regu- lator is in contemplation to solve this problem. First task of this regulator is estimation of previous maneuvers by proces- sing kinematic parameter vectors sets. Second task is estimation of coordinates for every collocation member. Finally, nonparametric regulator must synthesize control which allows to process station retention and collocation. Suggested algorithm belongs to nonparametric class, so it is not necessary to know parametric form of controlling law. It is based on modification of Nadaraya-Watson nonparametric estimation. The geostationary movement model including main perturbations, and most common collocation approaches are suggested. Nonparametric control algorithm is proposed.
Nonparametrics, geostationary spacecraft, collocation
Short address: https://sciup.org/148177730
IDR: 148177730 | UDC: 62.501
О задаче коллокации геостационарных спутников Земли
Рассмотрена задача коллокации, т. е. задача совместного удержания космических аппаратов. В рамках данной задачи предполагается, что космические аппараты управляются из разных центров управления поле- тами, а обмен информацией, в частности о векторах кинематических параметров и планах коррекций, отсутствует. Таким образом, предполагается наличие полной информации и возможность управления лишь для одного из космических аппаратов, участвующих в коллокации, в то время как для других доступна лишь выборка векторов кинематических параметров, полученных на предшествующие моменты времени. Данная ситуация соответствует условиям недостатка априорной информации, а значит, и о всей системе, т. е. непараметрической неопределенности, так как неизвестен принцип, согласно которому из всех возможных планов коррекций выбирается план, закладываемый на не управляемые нами космические аппараты. В таких условиях современная теория управления космическими аппаратами не может обеспечить управление, гаран- тирующее отсутствие столкновений и выполнение задачи удержания космического аппарата. Для решения этой задачи предполагается синтез непараметрического регулятора. Первой задачей этого регулятора является оценка предыдущих планов коррекций на основе выборки начальных условий за определенный период времени. Второй задачей является оценка последующего положения космического аппарата на основе выборки коррек- ций, полученной на предыдущем шаге. Наконец, на основе информации о будущих коррекциях регулятор должен синтезировать управление, обеспечивающее минимальное безопасное расстояние между космическими аппаратами, а также решение задачи удержания. Алгоритм для решения данной задачи относится к классу непараметрических, т. е. для реализации алгоритма не требуется знания параметрического вида закона управления объектом. За основу взята оценка посредством ядерного сглаживания, т. е. модификация непара- метрической оценки регрессии типа Надарая-Ватсона. Приведены описание модели движения геостационарного космического аппарата, основные возмущающие воздействия, основные подходы к коллокации, а также основные методы осуществления коллокации на прак- тике. Рассмотрен алгоритм, позволяющий получать управление в условиях непараметрической неопределенности.
Text of the scientific article To geostationary collocation problem
Introduction. The task of a collocation, i. e. the task of cooperative station keeping, is rather new task of ballistics which relevance is connected with the increase of spacecrafts (SC) number located on the geostationary orbit.
Geostationary orbit is a circle equatorial orbit on which in case of movement the vector of angular orbital speed of the satellite is equal and matches the vector of angular speed of the Earth around own axis rotation. The sidereal period of such SС equals a star day that is 86164 sec., while the eccentricity and inclination of the orbit equal zero [1]. Thus, in the absence of the perturbing influences, SС remains fixed over a standing point.
Satellites in a stationary orbit have gained the widest spread owing to advantages, such as:
-
1. Essential simplification of earth-satellite communication stations equipment due to uselessness of complicated tracking systems in antennas, to switch between satellites during the session etc.
-
2. Possibility of round-the-clock continuous service by one satellite up to 42 % of the land surface at the expense of rather big orbit height.
-
3. Quality support of radio communication owing to signals level persistence on the inputs of receivers and absence of the Doppler frequency deviation.
-
4. Ability to easyly contact with the satellite at any time for onboard systems state monitoring, flight control by means of limited means (up to one single means).
Geostationary artificial Earth satellites are used in radio communication, television, meteorology, airplanes traffic control, relaying data from the satellites moving on low orbits, etc. [2]
In practice under the influence of perturbing forces orbit parameters deviate from geostationary ones, therefore instead of a geostationary orbit quasi-geostationary orbit, i. e. orbit with parameters rather close to geostationary is used. For SC maintenance in the geostationary orbit (GSO) it is necessary to permanently solve the problem of station keeping parameters of the orbit in the required range. This task is well studied and described, for example, in [1].
Due to the uniqueness of the geostationary orbit and growth of SС number placed on it, the task of control in collocation conditions acquires special relevance.
Under collocation should be understood a situation when retention boundaries on the longitude of two and more SС are crossed which can cause collisions. Let’s call SС which are in collocation conditions members of collocation. Now methods of SС control for this case are developed and described if all members are controlled from one mission control center (MCC), or actions of MCC are coordinated [3]. However, for those cases, when it is impossible, the task stops being trivial.
The essence of control is as follows. Supposing there are several geostationary SС with the crossed retention areas, controlled from different MCC. Without loss of generality it will be read that there are two members of collocation as the algorithms, received under this assumption, can be extended to the general case by repetition for each couple of SС.
Only first SС serves as an object under control. Its physical characteristics are known, there is a selection of its kinematic parameters vectors (VKP) in the previous time points and realized correction plans. Information exchange between MCC is not available, so the position information of the second SС arrives with gaps. Physical characteristics of the second SС are known approximately, its corrections plans are unknown. It is necessary to provide such control of our SС, so that, firstly – to carry out the retention task, i. e. not to allow escape of longitude values, eccentricity and inclination from some set in advance range, secondly – so that the inter-satellite distance was more than a minimum safe distance.
The task of SС control can be reformulated as follows. It is necessary to find such a correction plan, appearing in the controlling mode that the Kepler’s orbit elements, received while submission on SС, meet the following criteria:
Δ R > R min , e 1 ≈ 0, i 1 ≈ 0, T 1 ≈ T З , where Δ R – geometrical distance between satellites; e 1 – eccentricity of “our” SС; i 1 – declination of “our” SС; T 1 – sidereal period of “our” SС; T З – sidereal day.
Correction plan is the physical embodiment of control which starts engines in specified time point and with the specified duration. Thus, functioning as f ( λ 0, T 0, e 0, i 0, υ 0, u 0, α , τ , µ ), where λ 0 , T 0 , e 0 , i 0 – longitude, period, eccentricity and inclination of S at the start of correction respectively which are responsible for the previous system state, υ0 and u 0 – true anomaly and S latitude argument at the start of correction – the beginnings of correction which are responsible for the moment; τ – correction duration; α – vector of direction cosines of correction thrusters (CT) angles. As engines are tightly fixed at the assembly stage of S – the angles can be accepted invariable for each CТ. τ – correction duration; µ – vector of uncontrollable, but observed exposure. It includes disturbance input, such as disturbing geo-potential, Moon and the Sun gravitation, pressure of solar radiation and position of uncontrollable SС as well.
Geostationary spacecraft station keeping. Let’s consider the collocation task as the task of automatic control in nonparametric uncertainty conditions, i. e. in conditions when there is no information about parametric control law. This statement differs from the classical parametric problem definition of control described in [4]. The given problem definition is in many respects similar to one described in [5], assuming the dual control of an object, similar to [6]. At the same time with acquiring posteriori knowledge about the object, training of regulator is suggested, so the estimated algorithm can be referred to trainee class [7]. The control diagram is similar to the one suggested by A. A. Feldbaum in [8]. In this case the system is considered as “a black box” which is enveloped by the second circuit representing the regulator synthesizing control based on the previous selective values of inputs and outputs. The system will consist of two objects: first – controlled SС, and second – uncontrollable SС. As coordination between MCC is not available, the second SС will cope only with proceeding from retention requirements. For the description of disturbed movement of SС Lagrange principle according to which the disturbed movement of the satellite happens on the orbit, elements of which change over. It means that in each time point the disturbed orbit matches some orbit having common radius vector and velocity vector. Such orbits are called osculating orbits, orbit elements are osculating elements [9].
To describe the evolution of osculating elements under the influence of the disturbing forces introduced is the STW orbiting coordinate system where the ST plane matches the orbit plane, axis T is directed towards movement, axis S is perpendicular to it, and axis W adds system to right [10]. In this coordinate system, generally, evolution of elements is described by the following system of non-linear differential equations [1]:
where i – orbit inclination (angle between equatorial plane and orbital plane; u – latitude argument of S (angle counted from the orbital plane directing from Earth center on the ascending node until the current radius vector of the satellite in the direction of its movement on the orbit); p – focal orbital parameter; e – orbit eccentricity; µ – gravitational parameter of Earth, constant µ = = 398600.440 km3/s2; ω – a perigee latitude argument (angular distance of orbital perigee counted in the orbital plane directing from Earth center on the ascending node towards satellite movement),
-
q = e cos to ; k = e sin m ;
r =
p
1 + q cos u + k sin u ’
Δ g iS , Δ g iT , Δ g iW – perturbing accelerations.
The given system has no analytical solution, however, can be solved using numerical method, for example, or Adams’s method [11].
The main disturbing forces are:
-
1. The disturbing gravitational capacity of Earth.
This influence is connected with the fact that Earth is not a full-sphere with uniform distribution of masses. Because of this SС has acceleration towards one of the points of stable equilibrium (located around longitudes 75.1 el. and 105.3 wl.) and in the absence of adjusting maneuvers starts fluctuation under the law of pendulum within the period a little bit over two years [2]. Influence of the Earth disturbing gravitational capacity can be determined by the following formula [9]:
d Q r sin u
dt
ц p sin i
di r
— = , cos u
7 £A g jw; j = 0
■ £A g jw ;
j = 0
ц ” n ( a ) n
R ® = - £ £ I I [ C nm cos m X + S nm sin m X ] pnm (sin ф )> r n = 2 m = 0 V r /
dp = 2 J p £ A g jT ;
dt ц Ц j = o
dq = E I sin u £ a g dt V ц V j = 0
V
j
' js +
+
r
p
r .
cos u +— q £ a g jT + P J j = 0
n – Number of harmonicas; in practice 8 harmonicas are commonly used µ – the Earth’s gravitation constant; аЕ – the big Earth’s semi-axis; r – geocentric distance of the satellite; φ, λ – latitude and longitude of the satellite respectively; С nm , S nm – the dimensionless coefficients characterizing outside gravitational field of Earth P nm (sin φ) – Legendre functions. They are of two types: with Legendre polynomials, with 0 < m ≤ n – associated Legendre functions.
With m = 0 Legendre functions are as follows
r
jW I ;
Pn,0(sin Ф) =
With 0 < m ≤ n
1 dn (sin2( V ) - 1) n
2 nn ! d (sin ф ) n
dk Pp *
-r = J— cos u £ A g dt ^ц! j = 0 -
V
j
jS +
Pnm (sin Ф) = (1 - sin2 Ф)m/2
dm pn 0 (sin ф ) d (sin ф ) m
+
r
p
r sin u +—k £agjT P J j=o
jW I ;
2. The Moon and the Sun gravitation attraction.
For the SС based on MCC, it leads to decline rise from 0 approximately to 14.6º in about 27 years and the fall to zero during the following 27 years, etc. [2].
Influence of the Moon and the Sun gravitation can be calculated by the following formula [9]
— = ^ 1 - dt r 2
ц p
„ I 1 r , , I
Ri =цi 7---Tcos Ti , VAi r J
– the index accepting value 1 for the Moon, 2 – for the Sun; µ – gravitational parameter of the appropriate celestial body; µЛ = 4902.778 км3/с2; µС = 1.32712438e + 11 км3/с2; r – geocentric distance to the satellite; r – geocentric distance to the Sun and the Moon; Δ – distance between the satellite and a celestial body; Ψ – angle between the geocentric directions towards the satellite and celestial body, or
Given that the speed of the SC’s drift changes according to formula
• 6 n a 2 A g 4 t At
АЛ =-----------,
240ц where АХ - SC’s drift speed, deg/day; ц - Earth’s gravitation constant.
Given that the change of longitude during the correction can be calculated by formula
R i =ц
1 xx i+ yy i + zz
A i
A r 3
,
where x , y , z – SС coordinates; аx i , y i , z i – Moon and Sun coordinates respectively.
In this case
ax = —^^--
4 a A g 4 t
1 -
' 4 T At
-ю з At ,
where ω з – angular speed of the Earth rotation.
The eccentricity of SC changes under the following law
А g j = Ц i
,
e =
A
where X – vector of SС coordinates; X i – vector of the Moon and the Sun coordinates respectively [12].
3. Direct light pressure.
Under the influence of light pressure the SС’s orbit expands perpendicularly to the direction towards the Sun which means that the eccentricity of an orbit does not remain invariable [2].
Influence of pressure of solar radiation can be calculated by the following formula [6]
П п n eо + 4AeQ cos u0 +--At sin—At + 4A sin —At , Tcp Tcp
where
T cp
A = 2Аg 4 t ---, Ц aср – the average value of the big semi-axis during correction,
a ср
'4 T At I;
F S Ss (1 + k ) Г rs ) 2
F = x —---- cos a I I m c I A J
,
where S – satellite cross-section area in the direction towards the Sun; m – satellite mass; S S – average value of solar constant; k – satellite reflection coefficient; с – light velocity; α – descent angle of sunshine on the surface; χ – shadow function, its values lie on the interval [0;1], or
S | as F = kq — I -S m lA s.
x S
A s
x
,
where x – geocentric vector of the satellite position; x S – geocentric vector of the Sun position; Δ S – interdistance between the satellite and the Sun; a S – big semiaxis of Earth’s orbit; k – parameter, characterizing the reflection features of the satellite surface ( k = 1 – mirror reflection, under k = 1.44 – diffusion); q – the sun constant, q = 4.65 ∙ 105 din/см2.
Control is exercised by means of switching on the correction thrusters (CT) at a given time of t 0 c with duration Δτ. Depending on the thrust direction, it is possible to select two types of retention corrections
1. With use of thrust in the transversal direction.
Transversal thrust is used for correction of the period and orbit eccentricity.
The period of SС changes according to the law:
T ср – average period during correction,
T cp = 2П^ ;
υ 0 – the true anomaly at the beginning of correction.
Thus, eccentricity shift depends on the true anomaly at the beginning of correction.
The maximum reduction of eccentricity is reached under n „ 3л,, u0 = 2 given that Ag4T > 0, or u0 = — under Ag4T < 0 и continuous during the half of the period. Thus, eccentricity corrections should be applied so that the middle of correction falls on the points, where u0 = n under Ag4T > 0 (u0 = 2n given Ag4T < 0), correction duration shall not exceed 12 hours.
2. Applying binormal thrust.
Binormal thrust is used for correction inclination. Inclination herewith shifts according to the formula
a 0 2
i = i o + A g 4 W Ц
. At ) - sin u о ) ,
where i 0 – initial inclination; i – inclination by the end of correction; Δ g 4 W – binormal thrust component; u 0 – latitude argument value at the beginning of correction; n 0 – average S speed at the beginning of correction:
T = T o 1 + 3
' j a T A g 4 T AT) ,
n о = \ :j.
where T – CS period, sec.; T 0 – the period at the beginning of correction, sec.; a 0 – big semi-axis at the beginning of correction, km; Δ g 4 T – CM thrust in transversal direction; Δτ – correction period, sec.
Similar to eccentricity, inclination shift depends on the beginning of correction. Given Δ g 4W & gt ; 0 middle of correction shall fall on the point where it shall last no more than 12 hours. For Δg 4W <0 middle of correction shall fall on the point where u = 2 - .
Binormal thrust influence neither eccentricity, nor SС period, its speed of drift and longitude.
On real SС, CТ are usually located so that both transversal, and binormal thrusts are not zero. Thus, corrections allow to change all three parameters. Correction start time is a compromise between requirements to accentricity correction and correction of the inclination. According to the same requirements the number of correction motors (CТ) is selected, therefore the direction of transversal and binormal thrust.
Collocation. Let’s consider the main collocation principles.
Geostationary Earth satellites are placed only in a circular equatorial orbit with the radius (from Earth center) about 42164.2 km. These conditions limit the quantity of longitudinal slots, areas of longitude retention. In 1971 the World Administrative radio conference (WARC) recognized the geostationary orbit as a limited natural resource. At the same time the increase in the number of Earth geostationary satellites causes the boundaries on longitude to get narrower and also for certain S can overlap or even coincide. Supposing we call these conditions collocation conditions, while S which are in these conditions can be called members of collocation. Boundaries longitudinally crossing may cause the risk of collision between members of collocation, in particular due to enormous solar panels used in the modern missions.
Initially distribution of longitudes was applied only with the purpose of avoiding interference between adjacent SС which used identical radio frequencies, whereas the collision risk was estimated as insignificant. Those assumptions were explained by typical boundaries having more than 100 km on the longitude and latitude and, at least, half in the radial direction. Only afterwards, with the growth of SС placed on a geostationary orbit, some space agencies realized that the potential risk of physical collision is higher than it was supposed. However, collisions of 2 operating S has never been reported, a probable cause of which was that there was no request to take measures from WARC [3].
The risk of collisions issue strongly varies among the space agencies. Some neglect it, while others strive for its minimization. In case when all Ss are controlled from the same MCC, collocation methods become quite obvious, and are described, for example in [3]. However, in case there are Ss which are controlled from a different MCC, the task becomes complicated with the need of constant information exchange between all involved MCCs and also constant coordination of corrections.
-
1. Currently 4 approaches to collocation choice of the relevant one depends on the number of the Ss and MCCs involved, accuracy of orbit spotting, size of boundaries longitudinally and attitudinally, etc.
-
2. Without avoiding collisions.
-
3. Not coordinated collocation.
-
4. Collocation by means of separation.
-
5. Coordinated collocation.
This approach can be employed during the short time frame in case of few members of collocation.
Employing this method SС’s are controlled independently, however before and after each correction the distance between all members of collocation is evaluated. Corrections are planned so that to keep some “safe” distance. Maneuvers of collisions avoidance are entered in the plan of corrections.
Need of assessment of SC orbits and information exchange between MCC force to make corrections only for one SC co-instantaneously and also to make a break between correction plans on any S at least 1,5–2 days.
In this case different longitudinal subareas, eccentricity vectors and declination of initial boundaries correspond to different satellites. Theoretically, given this control without information exchange between participants of collocation is possible.
The weak point of this approach is boundaries’ “narrowing” in all respects as there is retention of the SC parameters in narrower boundaries requiring additional fuel. Also these subareas shall consider not only requirements of this approach, but also various errors of control and orbit spotting which make this method inapplicable if the initial boundaries are too narrow.
In this case all members of collocation are built according to system where their daily parameter oscillations of the orbit and drift speed are identical. Corrections for all SC are carried out simultaneously.
This approach requires constant information exchange and control error correction to save the constructed system, however, maneuvers of deviation are required only in case of force major [3].
Depending on selected orbit parameters providing the collocation, 6 modes of corrections partition can be identified:
-
а) Longitudinally.
When using this mode a specific longitudinal area corresponds to every SC. It becomes possible only if the integrated boundaries are rather wide and the number of SC is not enough. This mode is not a real collocation as each SC is retained in its own boundaries irrespective of remaining ones.
-
b) Longitudinal separation during the drift cycle (in phase paths).
This method also assumes longitudinal separation, but areas partially overlap and every single one is engaged with different members of collocation at the different moments of the retention cycle. It is the example of the coordinated retention corresponding to method 4, given above. Corrections of longitude shall be carried out for all Ss in the same day, so will change under the same law simultaneously. Eccentricities do not require comparison while they are rather small so it will not cause big longitudinal oscillations, but this mode can be integrated with the third one, described below. This mode best fits S in case of minor pressure from solar radiation.
-
c) Longitudinal separation under oscillations caused by eccentricity.
In this case longitudinal boundaries also break into several partially crossed areas, but they deal with different members of collocation at the different times of sidereal days due to longitudinal oscillations caused by eccentricity. Therefore, this method can be applied to Ss with high, but close to identical pressure of solar radiation. Oscillation phase shall be identical to all members. Corrections for the members of collocation shall be carried out practically simultaneously, but some deviations are allowed to correct errors after previous retaining corrections.
-
d) Plane separation on eccentricity.
In this case each S uses all available longitudinal area, while for collocation the difference of target eccentricity vectors is applied. Orbital planes can match or not, so each SC can make inclination corrections, regardless remaining ones.
This method is best applied given pressure of solar radiation is high. The principal disadvantage of this method is high error sensitivity to SC’s speed drift. Therefore this method is usually combined with the one described below.
-
e) Combined placement by inclination and eccentricity in the meridian plane.
This mode is similar to the previous one, except that for retention area separation not only eccentricity vector is used, but also an inclination vector. The only, but important advantage of this mode is independence from longitudinal difference which eliminates lack of error sensitivity by longitude and drift speed.
Therefore, this collocation method is preferable for missions with low or medium accuracy of tracking systems. However, the shortcoming is that inclination corrections shall be coordinated between members, which can be difficult if they have different correction restrictions
-
f) Separation by all three parameters.
In this mode for each SC the longitudinal subarea, eccentricity vector subarea and inclination vector subarea are selected. This mode is of minor practical interest as it does not give new collocation opportunities in comparison with previous modes.
From the aforesaid all modes of collocation assume essential coordination between all participating MCC, in particular, coordination of corrections and also creation of some system excluding collision risks. Corrections are carried either simultaneously, according to the system coordinated earlier, or successively after an SC orbit spotting. It shows essential disadvantage of modern approach to collocation as:
-
а) in case interaction between MCC for one or another reason is impossible, solution of the collocation task becomes difficult;
-
b) between corrections there are breaks for coordination of corrections with other MCC and other S orbits specifying which complicates the retention task;
-
в) many methods superimpose additional restrictions on longitudinal, eccentricity and declination retention area, and therefore attract additional fuel consumption.
One of the methods mostly applied in practice is longitudinal separation. The minimum safe distance between S (that is equivalent to longitudinal subarea) is selected proceeding from the error of S orbit determination. The main sources of errors in navigation measurements are: errors of an onboard scale formation; errors connected with poor knowledge of radio waves propagation conditions in the Earth atmosphere; errors of a customer’s receiving equipment [13]. This distance normally equals 36–72 km while the shift along the orbit of the second S can reach 45 km a day.
Another method put into practice is a combined longitudinal, eccentricity and declination placement. In this case rated values of inclination and eccentricity vectors shall be delivered at the angle of 120 ° .
Nonparametric regulator. As an algorithm for the controller synthesis algorithms of nonparametric family are suggested. This class of algorithms is intended for operation in nonparametric uncertainty conditions [14], i. e. in conditions when there is no knowledge of parametric structure of the law describing an object. It corresponds to the case considered as the principle according to which one of the set of possible corrections plans is selected remains unknown. Assessment is made only basing on selection of inputs and outputs of an object.
For a dynamic system the control algorithm is modification of nonparametric assessment of regression like Nadaraya-Watson (nuclear smoothing) and is as follows [15]:
Sk
Z « ПФ i = 1 j 1
s ц t -ц i cj у ц 7
Sk
Z пф
£ j = 1
ц j -ц j у C t
n
ПФ jj=1

m ПФ j = 1
f x t - x i
I c j у x-x
where { ц ; , и , y, } - selection of uncontrollable influences, inputs and outputs of an object respectively; S – range; k , n , m – vector length of uncontrollable influences μ, controls of u and output of an object x respectively; С x , C μ , C x –1 – blur coefficient; Ф – bell-shaped (nuclear) function.
To input parameters of an object u corrections with the following parameters arrive:

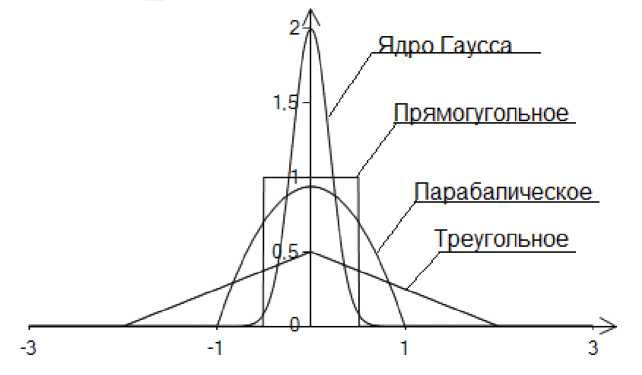
Bell functions with CS = 1
Колоколообразные функции при CS = 1
3. Quadratic function:
F ( t ) = ^
15(1 - t 2)
16( )
given t 2 < 1;
0, given t 2 > 1.
4. Gaussian kernel:
F ( t ) =
C S ТУ
exp
( t - t )
2 C S 2
The choice of one of nonparametric functions depends only on what properties assessment shall have: for example, whether it shall be smooth, continuous etc. At the same time the model error depends on this choice a little. Therefore, the task comes only to a choice of blur coefficients values.
Thus, use of this controller allows monitoring the object in the conditions of nonparametric uncertainty which corresponds to the given case, where the principles, on which one of possible corrections plan sets for the second SC is selected, are unknown.
The algorithm (2) given above offers selection existence, so an object shall be initially available for the experiment, or to be manned briefly. If it is impossible, to control the object the retrieval step is applied Δ u [5].
In this case the controlling algorithm is as follows
k
F, = ПФ i j=1
Ц Jt -Ц i
j
ц
m
X ПФ j=1

S
У uF
u. = —1 + A u.
sS
У F i =1
This step represents the control synthesized by some non-adaptive regulator capable of solving the problem of control at the initial stages, i. e. before selection accumulation. For example, for dynamic systems, as a retrieval
step the control synthesized by PID – regulator can be used. With growth of the amount of selection, influence of the retrieval step decreases, and those of nonparametric component – grows [5].
Conclusion. In summary, the task of geostationary SC control in collocation conditions in the absence of information exchange between MCC has been considered above. The existing controlling system of S in these conditions are described, showing that in the absence of coordination between MCC it does not work. The class of algorithms which can be applied in such situation, in particular, the algorithms based on nonparametric regression of assessment by means of bell-shaped functions is considered.
References To geostationary collocation problem
- Чернявский Г. М., Бартенев В. А., Малышев В. А. Управление орбитой геостационарного спутника. М.: Машиностроение, 1984. 144 с.
- Современные технологии навигации геостационарных спутников/Ю. М. Урличич . М.: Физматлит, 2006. 271 с.
- Soop E. M. Handbook of geostationary orbits. Norwell: Microcosm. Inc., 1994. 309 p.
- Цыпкин Я. З. Адаптация и обучение в автоматических системах//Автомат. и телемех. 1966. № 1. С. 23-61.
- Медведев А. В. Теория непараметрических систем. Управление -I//Вестник СибГАУ. 2013. № 2(48). С. 57-63.
- Фельдбаум А. А. Теория дуального управления. I//Автомат. и телемех. 1960. Т. 21, № 9. С. 1240-1249.
- Воронов А. А. Основы теории автоматического управления. Ч. 3. Оптимальные, многосвязные и адаптивные системы. 2-е изд., перер. Л.: Энергия. Ленингр. отд-ние, 1970. С. 328.
- Фельдбаум А. А. Основы теории оптимальных автоматических систем. М.: Физматгиз, 1963. 553 c.
- Антонович К. М. Использование спутниковых радионавигационных систем в геодезии. М.: ФГУП «Картгеоцентр», 2005. 334 с.
- Чернявский Г. М., Бартенев В. А. Орбиты спутников связи. М.: Связь, 1978. 235 с.
- Авдюшев В. А. Численное моделирование орбит. Томск: Изд-во НТЛ, 2010. 282 с.
- Управление и навигация искусственных спутников Земли на околокруговых орбитах/М. Ф. Решет-нев . М.: Машиностроение, 1988. 336 с.
- Спутниковые навигационные системы. М.: Моск. авиац. ин-т, 2004. 338 с.
- Медведев А. В. Непараметрические системы адаптации. Новосибирск: Наука, 1983. 176 c.
- Медведев А. В. Основы теории адаптивных систем/Сиб гос. аэрокосмич ун-т. Красноярск, 2015. 526 с.
