Трансмиссия быстроходной гусеничной машины с центральной коробкой передач и бесступенчатым механизмом поворота

Автор: Филичкин Николай Васильевич
Рубрика: Расчет и конструирование
Статья в выпуске: 11 (66), 2006 года.
Бесплатный доступ
Предложена и обоснована концепция построения кинематической схемы трансмиссии быстроходной гусеничной машины с центральной коробкой передач и регулируемой гидрообъемной передачей в механизме передач и поворота. Схемное решение позволяет использовать в трансмиссии гидрообъемную передачу с минимально возможной установочной мощностью
Короткий адрес: https://sciup.org/147151371
IDR: 147151371 | УДК: 623.438.3
Текст обзорной статьи Трансмиссия быстроходной гусеничной машины с центральной коробкой передач и бесступенчатым механизмом поворота
На протяжении последних десятилетий в мировом танкостроении, по крайней мере, в наиболее технически развитых государствах, практически абсолютное применение получили трансмиссии объектов бронетанковой техники, включающие в себя полнопоточную комплексную блокируемую гидродинамическую передачу, центральную, как правило, планетарную коробку передач (КП) и многорадиусный бесступенчатый механизм поворота (МП), состоящий из гидрообъемной передачи (ГОП) с регулируемым насосом и нерегулируемым мотором, связанным дополнительными зубчатыми передачами с двумя суммирующими планетарными механизмами (СПМ).
Именно так выполнены трансмиссии большинства современных основных боевых танков, боевых машин пехоты и машин различного назначения на специальных гусеничных шасси, таких как Ml «Абрамс» (США), «Леопард-2» и «Мардер» (Германия), БМП-3, БМД-3 и гусеничные машины промежуточной категории по массе ГМ-352, ГМ-569 (Россия), «Челленджер» (Великобритания), «Леклерк» (Франция) и др. [1-6].
Обобщенная кинематическая схема таких трансмиссий, наиболее существенные недостатки, вытекающие из их схемного решения, приведены в [7].
Общим неотъемлемым составным элементом этих трансмиссий является гидрообъемный МП дифференциального типа, который, вместе с центральной КП, образует двухпоточный механизм передач и поворота (М1Ш). Ближайшим предшественником (прототипом) такого технического решения является двухпоточный МПП тяжелого танка T-VIH «Тигр» (1942-1945 года, Германия). МПП танка «Тигр» во втором потоке мощности содержал простейшую двухскоростную КП с фрикционным управлением, что позволяло при повороте танка на каждой передаче основной центральной КП получать по два различных промежуточных фиксированных радиуса поворота. В шестидесятых годах XX века эту двухскоростную нереверсируемую КП заменили регулируемой реверсируемой ГОП, которая, по сути, является тоже КП, но с бесконечно большим числом передач, т. е. появилась возможность на каждой передаче основной центральной КП получать бесчисленное множество различных радиусов поворота без использования буксующих фрикционных управляющих элементов (тормозов и муфт).
С тех пор такие трансмиссии получили весьма широкое применение, несмотря на некоторые недостатки, главным из которых является большая величина необходимой установочной мощности ГОП в МП для обеспечения высоких показателей подвижности машины при ее криволинейном движении. Так, например, в [8] обоснован необходимый минимум порядка 750...900 кВт установочной мощности ГОП для основного боевого танка массой 60 т и не менее 180...300 кВт для машин легкой и промежуточной по массе категорий. Такие установочные мощности ГОП вплотную приближаются к значениям номинальной мощности двигателей этих машин.
При соблюдении указанных минимумов становится затруднительным, а зачастую и практически невозможным подбор ГОП с необходимой для получения высоких показателей подвижности машины установочной мощностью и, в то же время, с приемлемыми массогабаритными и стоимостными характеристиками, особенно для основного боевого танка.
В основном, именно из-за этого Россия до сих пор не имеет на вооружении основного боевого танка с бесступенчатым МП.
Высокий уровень необходимой установочной мощности ГОП для дифференциального бесступенчатого МП обусловлен следующими обстоятельствами:
-
- дифференциальный способ поворота машины;
-
- прямой способ регулирования производительности насоса ГОП и величины радиуса поворота;
-
- одновременная передача мощности от ГОП к одноименным основным звеньям (солнечным зубчатым колесам) СПМ обоих, и отстающего, и забегающего бортов.
При дифференциальном способе поворота происходит обеспечиваемое МП уменьшение
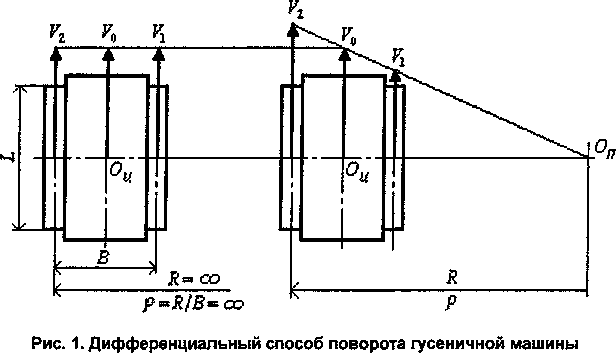
скорости отстающего борта и такое же по величине увеличение скорости забегающего борта при неизменной скорости центра машины (рис. 1). Это утверждение верно при условии постоянства скоростного режима работы двигателя, постоянном передаточном отношении полнопоточной гидродинамической передачи и отсутствии переключений в КП при переходе машины от прямолинейного движения к повороту.
На рис. 1 обозначено: Ко, Г,, Г2 - скорости поступательного движения, соответственно, центра машины, отстающего и забегающего бортов; L - длина опорной поверхности гусеницы, В - колея машины; R - абсолютный радиус поворота; р - относительный радиус поворота; Оц
-
- геометрический центр машины; Оп - центр поворота машины.
При дифференциальном способе поворота высокий уровень необходимой установочной мощности ГОП обусловлен необходимостью ее работы одновременно и на торможение отстающего борта, и на разгон забегающего борта.
Довольно распространенное даже среди специалистов мнение о преимуществе дифференциального способа поворота, заключающееся в возможности движения машины в повороте с более высокой скоростью, чем при других известных способах (бортовом или независимом, редукторном («ЗК» - Зайчик, Крейнес)), несколько поверхностное, так как предельные скорости прохождения поворота машиной лимитируются отнюдь не способом поворота, а возможностью сохранения устойчивости движения и управляемости машиной в повороте. Поэтому, при повороте машины на высоких скоростях движения, с малыми радиусами поворота, на скользких и слабосвязных грунтах для исключения опасности срыва машины в неуправляемый боковой занос приходится заблаговременно, до входа в поворот, снижать скорость машины, подтормаживать ее, переключать КП на пониженные передачи, т. е. проходить поворот на гораздо меньших скоростях, чем может сам по себе обеспечить дифференциальный способ поворота. Более того, другие способы поворота, иные, чем дифференциальный, при прочих равных условиях позволяют снизить объем дополнительных манипуляций, или даже исключить их полностью, так как эти способы поворота автоматически снижают скорость движения центра машины в повороте, причем, в тем большей степени, чем с меньшим радиусом выполняется поворот.
При прямолинейном движении машины (с = со) регулируемый насос ГОП дифференциального МП установлен на нулевую производительность, вал мотора ГОП не вращается, не вращаются и солнечные зубчатые колеса СПМ. Сами СПМ при прямолинейном движении машины работают как два одинаковых замедляющих редуктора с передаточным числом иэв ~ (л- + 1)/л- - й>эпР)<°впр гДе K = Z3jZc - кинематическая характеристика СПМ, равная отношению чисел зубьев эпициклического (Z3 ) и солнечного (Zc) зубчатых колес; й)3пр и оВпр - угловые скорости эпициклических зубчатых колес и водил СПМ в прямолинейном движении машины при остановленных солнечных зубчатых колесах (юс„р = о) СПМ. Передаточное отношение ГОП iron = ®м[юн =0, где юм =0 и ®н - угловые скорости валов мотора и насоса гидрообъемной передачи.
При входе машины в поворот начинают увеличивать производительность насоса, вследствие этого вал мотора начинает вращаться, заставляя вращаться с одинаковыми по величине и противоположно направленными угловыми скоростями солнечные зубчатые колеса СПМ. Величина этих угловых скоростей прямо пропорциональна, а получаемый при этом радиус поворота машины обратно пропорционален производительности насоса.
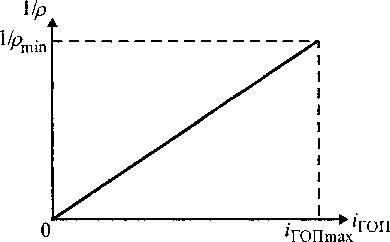
Рис. 2. Прямой способ регулирования радиуса поворота
ГОП, а именно, от iron = 0 до zm,7max .
При максимальной производительности насоса получают минимальный радиус (/>шш) поворота машины. Такой способ одновременного регулирования производительности насоса, передаточного отношения ГОП и величины радиуса поворота машины назван С.Е. Бурцевым [9] прямым способом регулирования. Графическая интерпретация прямого способа регулирования представлена на рис. 2. Очевидно, что при прямом способе регулирования радиуса поворота в диапазоне от прямолинейного движения (/7 = со) до минимального (р^ ) используется только половина диапазона регулирования Именно это обстоятельство (недоиспользование диапазо- на) также предопределяет высокий уровень необходимой установочной мощности ГОП.
Следует отметить, что в [9] рассмотрен альтернативный обратный способ регулирования ГОП. На рис. 2 он выглядел бы, как вторая диагональ прямоугольника, образованного координатными осями и пунктирными линиями. Но обратный способ регулирования ГОП заметного снижения установочной мощности не дает и, к тому же, обладает целым рядом существенных недостатков даже по сравнению с прямым способом, что приводит к очевидной нецелесообразности практического применения обратного способа регулирования во всем диапазоне радиусов поворота.
Для выяснения уровня тяговой мощности забегающего борта, мощности, нагружающей центральную КП, и установочной мощности ГОП в трансмиссии с дифференциальным МП выполним скоростной, силовой и мощностной анализ трансмиссии машины, поворачивающей на первой передаче с минимальным радиусом (р^ = 1,0). Методика выполнения таких анализов подробно изложена в [10].
На режиме pmin = 1,0 обеспечивается максимальная скоростная, силовая, а, значит, и мощностная загрузка МП и его важнейшей составной части - ГОП. Поэтому мощность, передаваемая через ГОП, может, с некоторыми достаточно непринципиальными оговорками, касающимися учета потерь мощности в ГОП, считаться эквивалентной ее установочной мощности.
Установочная (паспортная) мощность ГОП представляет собой максимальную механическую мощность, подводимую к валу насоса при работе ГОП с номинальной частотой вращения вала насоса при максимальном значении параметра регулирования подачи (производительности) насоса и номинальной (максимально допустимой при длительной работе) величиной рабочего давления в ГОП. .
Скоростной анализ МП выполняется путем совместного решения двух уравнений кинематической связи основных звеньев (солнечных, эпициклических зубчатых колес и водил) СПМ:
-
(1 + К)- ювх = сосх+К- ®Э1;
-
(1 + А")- ®В1 = юС2 + К • й)э2 ,
где (Овх и соВ2 - угловые скорости водил СПМ, соответственно, отстающего и забегающего бортов, причем на рассматриваемом режиме поворота юД1 = 0; ®С1 и б»С2 - угловые скорости солнечных зубчатых колес СПМ, соответственно, отстающего и забегающего бортов, причем при повороте с любым радиусом ®сх = -toC2; ®эх и ®Э2 - угловые скорости эпициклических зубчатых колес СПМ, соответственно, отстающего и забегающего бортов, причем, всегда, ®эх = ®Э2.
Положим, что безразмерная угловая скорость эпициклических зубчатых колес на первой передаче ®зу = ®Э2 = \/dKn , где dKn = и1/ивысш - кинематический диапазон КП, равный отношению величин передаточных чисел КП на первой и на высшей передачах переднего хода.
Учитывая, что <у6] = О и <уС1=-®С2, вычислим значения угловых скоростей основных звеньев СПМ и других звеньев МП и покажем их на рис. 3 наклонными пунктирными стрелками. Относительная (безразмерная) скорость поступательного движения геометрического центра машины Ко = К/^К +1)^,). скорости бортов: забегающего К2 =2Л'/((Л‘ + 1)(/ет), отстающего ^=0.
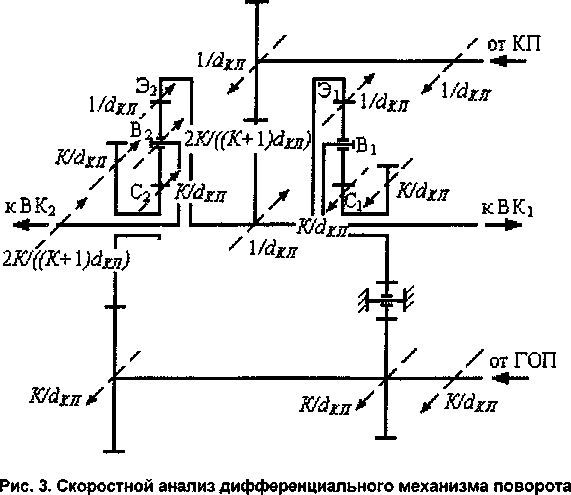
На рис.З также в безразмерном виде показаны угловые скорости вала мотора ГОП ®м = K(dKn и ведомого вала центральной КП ®кп = ydKn .
Выполним силовой анализ МП, полагая, что крутящие моменты на основных звеньях СПМ связаны между собой зависимостями:
м3=к-мс, мв =(к+\умс,
Мр + М в 4" М 3 — 0.
Кроме того, будем считать, что ведомые валы МП нагружены относительными (безразмерными) крутящими моментами, равными отношению силы тяги (торможения) к силе тяжести машины и зависящими от характеристик f,p грунта и геометрических параметров L, В гусеничного движителя машины:
Мвг = PjG = 0,5/ + 0,25//■ L/B, и Мт = PjG = -0,5/ + 0,25^■ L/B,
0,2575/^4-1)
0,25^/(754-1;
0,575/(75+1)^ I
0,5/(754-1)
^7 0,2575/(75+1)
_ । _I___ г 0,5/(75+1)
Ms2_0,5
Э
0,2 575/(754-1)
0,5
от ГОП
0,25/(75+1)
Ш=0,25
0,75/(754-1)
Рис. 4. Силовой анализ дифференциального механизма поворота
где Р2 и /J - тяговое и тормозное усилия на гусеницах, соответственно, забегающего и отстающего бортов; G - сила тяжести машины; / и р - коэффициенты сопротивления, соответственно, поступательному качению и повороту машины. Примем, что рассматриваемый поворот машины с радиусом, равным её колее, происходит на горизонтальной площадке, грунт которой обеспечивает коэффициент сопротивления качению / = 0,25, коэффициент сопротивления повороту р = 1,0, а отношение длины опорной поверхности гусеницы и колеи машины
L/B = 1,5 . Такие параметры грунта и ходовой части машины обеспечивают предельную по сцеплению величину силы тяги на забегающем борту машины:
Р2 = МВ2 = 0,5G ■ (/ + 0 Ди ■ T/S) = 0,5G • (0,25 + 0,5 • 1,5) = 0,5G, а безразмерные крутящие моменты, нагружающие ведомые валы МП, будут при этом МВ2 = 0,5 и Мвх = 0,25. Вычислим величины крутящих моментов, нагружающих все звенья МП, и покажем их на рис. 4 сплошными наклонными стрелками. Из рис. 4 видно, что ведомый вал КП нагружен моментом 0,257Г /(К +1), а вал мотора ГОП - моментом 0,75 /(К +1).
Выполняя обратную подстановку / , ц и Ы В, легко убедиться, что КП нагружена только сопротивлениями поступательному движению, а задача преодоления момента сопротивления повороту машины целиком возлагается на ГОП дифференциального МП.
Если перемножить угловые скорости звеньев МП (см. рис. 3) на соответствующие крутящие моменты, нагружающие эти звенья (см. рис. 4), можно определить величины мощностей, нагружающих КП и ГОП и построить потоки мощности в МП (рис. 5).
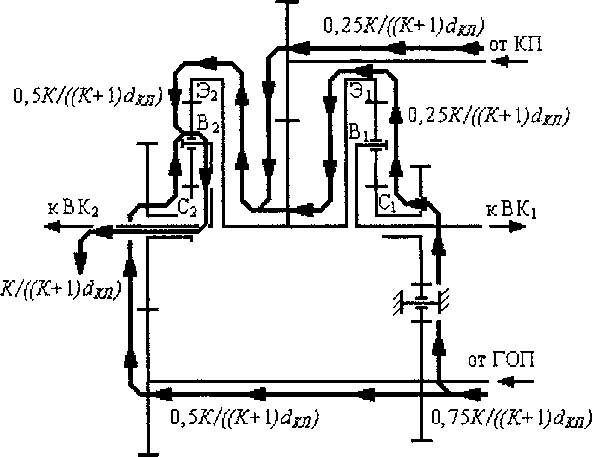
Рис. 5. Скоростной анализ дифференциального механизма поворота
Итак, в результате выполненного анализа дифференциального МП при повороте машины с радиусом, равным колее, получено: NJOn=^5K^K^dKn\ ^я=0,25К/((^ + 1Кл), где ^=<кК^кп\ N2 - относительная мощность, отводимая от МП к забегающему борту машины.
На кафедре «СиДСМ» ЮУрГУ разработана схема трансмиссии быстроходной гусеничной машины [7, И], в бесступенчатом МП которой возможно применение ГОП, со значительно, (в разы) сниженной установочной мощностью, по сравнению с дифференциальным МП. Это достигается за счет:
-
- перехода от дифференциального к бортовому (независимому) способу поворота;
-
- нового, смешанного способа регулирования ГОП в повороте;
-
- передачи мощности от ГОП к СПМ только отстающего борта.
Бортовой или независимый способ поворота обеспечивает в повороте сохранение забегающему борту машины скорости поступательного движения, равной скорости прямолинейного дви жения машины до входа в поворот, при автоматическом снижении скорости геометрического центра машины.
При повороте с радиусом, равным колее машины, скорость геометрического центра машины будет вдвое меньшей, чем у машины с дифференциальным МП.
План скоростей поступательного движения геометрического центра и бортов машины с бортовым (независимым) МП показан на рис. 6.
Особенность смешанного способа регулирования ГОП заключается в том, что при прямолинейном движении машины производительность насоса устанавливается такой, чтобы все основные звенья обоих СПМ имели одинаковую угловую скорость, т. е. насос ГОП работает с ненулевой подачей, пропорциональной скорости прямолинейного движения машины, а вращение вала мотора ГОП обеспечивает кинематическую блокировку обоих СПМ.
При входе машины в поворот уменьшают производительность насоса ГОП, переводя эту передачу в тормозной режим работы. Производительность насоса, при необходимости получения
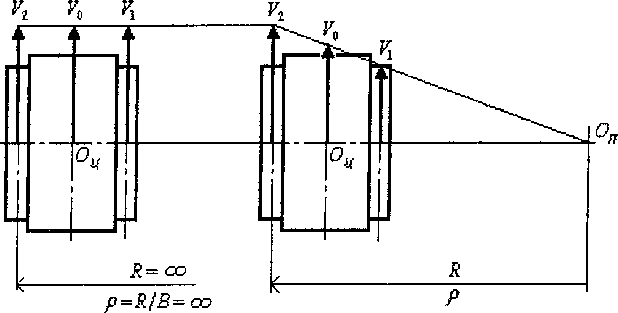
Рис. 6. Бортовой (независимый) способ поворота гусеничной машины
соответствующих радиусов поворота, уменьшается вплоть до нулевой. При нулевой производительности насоса вал мотора ГОП останавливается, машина поворачивает при нулевой мощности ГОП. Такой радиус поворота может быть назван промежуточным фиксированным ( Рф = К +1).
В диапазоне изменения радиуса поворота, от бесконечно большого до проме жуточного фиксированного, ГОП работает в тормозном режиме с передачей мощности от мотора к насосу при обратном способе регулирования. Затем, если необходимо получить радиус поворота ещё меньший, чем промежуточный фиксированный, используя гидравлический реверс ГОП, увеличивают производительность насоса, разгоняя вал мотора, который вращается теперь уже в противоположном направлении, по сравнению с тем, что было в диапазоне от радиуса равного бесконечности до промежуточного фиксированного радиуса. При максимальной угловой скорости вала мотора достигается минимальный радиус поворота, например, равный колее машины (Anin =1>°).
В диапазоне изменения радиуса поворота от промежуточного фиксированного до минимального, ГОП работает в тяговом режиме с передачей мощности от насоса к мотору; при этом осуществляется прямой способ регулирования ГОП.
Таким образом, в полном диапазоне изменения радиуса поворота, от бесконечно большого до минимального, реализуется смешанный способ регулирования ГОП: при со > р > ^ = К +1) -обратный, а затем, при ^рф = К +1)> р > 1,0 - прямой.
Смешанный способ регулирования позволяет использовать в повороте полный диапазон регулирования ГОП и, тем самым, уменьшить необходимую величину установочной мощности этой передачи.
При движении машины на высших передачах, с высокими скоростями, а также на скользких и слабосвязных грунтах следует, преимущественно, использовать диапазон обратного регулирования для предупреждения бокового заноса, а на низших передачах, при поворотах с малыми радиусами можно использовать полный диапазон смешанного регулирования.
Графическая интерпретация смешанного способа регулирования представлена на рис. 7.
Для выяснения уровня мощностной загрузки двигателя машины, центральной КП и установочной мощности ГОП в трансмиссии с независимым (бортовым) МП выполним скоростной, силовой и мощностной анализ трансмиссии машины, поворачивающей на первой передаче с мини-
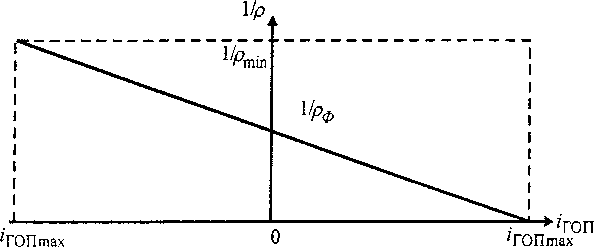
Рис. 7. Смешанный способ регулирования радиуса поворота
мальным радиусом, равным колее машины(^тш=1=0).
При выполнении скоростного анализа бортового (независимого) МП будем полагать, что безразмерная угловая скорость ведомого вала центральной КП такая же, как и в трансмиссии с дифференциальным МП, т. е. равная обратной величине кинематического диапазона КП.
При выполнении скоростного и последующего силового анализа следует учесть принципиальную разницу в работе СПМ дифференциального и независимого МП, заключающуюся в том, что при прямолинейном движении машины оба СПМ дифференциального МП работают с замедляющим передаточным числом иэв = (К + \)/К, а оба СПМ независимого МП находятся в состоянии кинематической блокировки и имеют передаточное число, равное единице. Поэтому, для полной объективности сравнения рабочих параметров обоих МП, между ведомым валом центральной КП и ведомыми валами независимого (бортового) МП следует ввести согласующую зубчатую передачу с передаточным числом \К + \)jК.
/ от КП
l/^ZJ?
_Э2
K/((K+\)dKS)x
В11 о
Т*1^
В2
№ 1№д)/
№д-*з
kBKi
<К+ l)do)
/ от ГОП
Таким образом, примем, что ®В2 ~®Э1 = К/^К + l)t/m). Кроме того, поскольку выполняется поворот с радиусом, равным колее машины, ®в1 ~ ®эг ~ 0 ■ Скоростной анализ бортового МП также выполняется путем совместного решения двух уравнений кинематической связи основных звеньев (солнечных, эпициклических зубчатых колес и водил) СПМ. Уравнения кинематической связи СПМ имеют тот же вид, что и для дифференциального МП.
/1 /хШ+у^
Результаты скоростного анализа представлены на рис. 8.
Рис. 8. Скоростной анализ бортового (независимого) механизма поворота
Скорости поступательного движения забегающего борта, геометрического центра машины и скорость отстающего борта в безразмерном виде:
0,25К(К+2)/(К+ I)2 0,25 Д£+2Ж+ I)2
"V /от КП
Г2=^/((^ + 1Ую);
K^O^/^ + lKJ;
1,25^/^+1)
Bl
•. .В2
0,25(К+2Ж+1)"
На рис. 8, также в безразмерном виде, показаны угловые скорости вала мотора ГОП и ведомого вала центральной КП:
дсу 0,25/f^+l)ZZ
Сз
^=^7((^+i^)
®кп = М^-кп •
Ш=0,25
Ms?-0,5
от ГОП
0,25/^+y^Z^-
0,25/(^+1)
Рис. 9. Силовой анализ бортового (независимого) механизма поворота
Видно, что при той же угловой скорости ведомого вала центральной КП и уменьшенной в К^К +1) раз скорости вала мотора ГОП, скорости геометрического центра машины и забегающего борта снизились ровно в 2 раза, чего и следовало ожидать при замене дифференциального МП на бортовой (независимый). Это обстоятельство практически полностью гарантирует устойчивый и управляемый поворот с любым радиусом на всех типах грунта, где поворот гусеничной машины с необходимым радиусом и без срыва в неуправляемый занос возможен в принципе.
Выполним силовой анализ независимого (бортового) МП, полагая, что крутящие моменты на основных звеньях СПМ связаны между собой теми же зависимостями, что и в дифференциальном МП. Кроме того, будем считать, что ведомые валы независимого МП нагружены точно такими же безразмерными крутящими моментами, как и в дифференциальном МП. Результаты силового анализа представлены на рис. 9.
Сравнивая рис. 4 и 9, легко заметить, что силовая нагрузка ГОП в независимом (бортовом) МП весьма существенно (ровно в три раза) снизилась: стала 0,25/(А" + 1) вместо 0,75/(Л" +1). Силовая нагрузка КП возросла с 0,25К/(К +1) до 0,25.КСК + 2)/(Х + 1)2, т. е. в (К + 2)/(к + 1) раз, что говорит о рациональном перераспределении силовых нагрузок между ГОП и центральной КП при неизменных величинах силовых нагрузок на выходных валах МП.
Увеличение силовой нагрузки центральной КП никакой опасности не представляет, так как КП должна быть рассчитана, как минимум, на восприятие полного максимального момента двигателя, да еще и умноженного на максимальный коэффициент трансформации комплексного гидротрансформатора, установленного между двигателем и КП. К тому же, увеличение силовой нагрузки любой передачи, включая и механические КП, приближение нагрузки к номинальной, расчетной для этой передачи, как известно, увеличивает ее КПД.
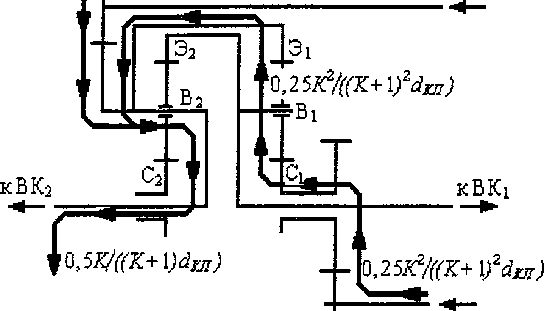
Перемножив значения угловых скоростей звеньев независимого (бортового) МП (см. рис.8) на величины крутящих моментов, нагружающих эти же звенья (см. рис.9), можно построить потоки мощности в независимом (бортовом) МП (рис. 10).
Итак, в результате выполненного анализа независимого (бортового) МП при повороте машины с радиусом, равным колее, получено:
0,25Ж+2Ж^+1/« у ^ ....... <11 < от КП
от ГОП
Рис. 10. Потоки мощности в бортовом (независимом) механизме поворота
Угол =0,25к7((^ + 1)2^), N^ =0,25K(K + 2)/^K + iydKn\ N2=0,5K/^K + l)dKn\
Сравнивая величины мощностей в МП двух рассматриваемых типов (см. рис.5 и 10) можно увидеть, что максимальная мощность, снимаемая с мотора ГОП, при независимом МП снижена в З^К + 1}/К раза, мощность, передаваемая от КП к МП увеличена в (К + 2)/(К + 1) раз, а мощность, отводимая от МП к забегающему борту машин снижена ровно в 2 раза по сравнению с теми же мощностями дифференциального МП, при условии, что в обеих трансмиссиях кинематические ха- рактеристики К СПМ и диапазоны dun одинаковы.
Снижение необходимой установочной мощности ГОП при переходе к независимому (бортовому) способу поворота гусеничной машины весьма сильно зависит от выбранной величины кинематической характеристики К СПМ. Эпициклические планетарные механизмы с одновенцо-выми и двухвенцовыми сателлитами смешанного зацепления, с приемлемыми осевыми и радиальными габаритами могут иметь величину в диапазоне К * 1,0...10,0.
Покажем (см. таблицу) влияние величины кинематической характеристики К СПМ на степень снижения необходимой установочной мощности ГОП в независимом МП.
Влияние кинематической характеристики СПМ независимого механизма поворота на степень снижения установочной мощности ГОП в трансмиссии с центральной КП
|
Кинематическая характеристика К СПМ |
1,0 |
2,0 |
3,0 |
4,0 |
5,0 |
6,0 |
7,0 |
8,0 |
10,0 |
|
Степень снижения установочной мощности ГОП в 3(7Г+1)/^ раз |
6,0 |
4,5 |
4,0 |
3,75 |
3,6 |
3,5 |
3,43 |
3,375 |
3,3 |
Из таблицы видно, что наибольший выигрыш по снижению необходимой установочной мощности ГОП можно получить, используя СПМ с минимальными значениями их кинематических характеристик.
Однако при назначении величины кинематической характеристики К СПМ следует учитывать, что она должна быть не меньше величины кинематического диапазона dKn центральной КП, если трансмиссия не содержит полнопоточной комплексной гидродинамической передачи или содержит ее, но привод насоса ГОП осуществляется от ведомого турбинного колеса гидродинамической передачи, как это сделано, например в трансмиссии основного танка США М-1 «Абрамс». Если же трансмиссия снабжена гидродинамической передачей и привод насоса ГОП осуществляется от ведущего насосного колеса гидродинамической передачи, как это делается в трансмиссиях подавляющего большинства зарубежных и отечественных гусеничных машин с бесступенчатыми МП, то кинематическую характеристику СПМ можно назначить, исходя из выражения K = dKniran, где iГдП - передаточное отношение разблокированной гидродинамической передачи, равное отношению величин угловых скоростей её турбинного и насосного колес, например, на режиме трансформации передаваемого момента при максимальном КПД гидродинамической передачи. Если же в дополнительном приводе от мотора ГОП до солнечных колес СПМ установить дополнительную синхронизирующую КП с точно таким же набором передаточных чисел, как и в основной центральной КП, то можно выбирать величину кинематической характеристики К СПМ, не увязывая ее с величиной диапазона dKn , а исходя из каких-либо других достаточно веских соображений.
Таким образом, применение предложенного [7, 11] бесступенчатого МП независимого (бортового) типа позволит, с учетом рекомендаций [8], применить в бесступенчатых МП разрабатываемых и модернизируемых основных боевых танков массой порядка 60 т ГОП с установочной мощностью 180...250 кВт (вместо 750. ..900 кВт), а для машин легкой и промежуточной по массе категорий - 50.. .90 кВт (вместо 180.. .300 кВт).
Выводы
-
1. Применение в трансмиссиях перспективных быстроходных гусеничных машин с центральными КП вместо известного дифференциального МП бесступенчатого МП независимого (бортового) типа [7, 11] позволит уменьшить необходимую для обеспечения высоких показателей поворотливости машины установочную мощность ГОП, как минимум, в 3-4 раза. Это позволит при разработке новых и модернизации существующих образцов бронетанковой техники применить для бесступенчатых МП гораздо более малогабаритные и дешевые ГОП. Кроме того, уменьшение установочной мощности ГОП в МП приведет к весьма существенному уменьшению потерь мощности в ГОП при поворотах машины, а значит, и к снижению тепловыделения в моторно-трансмиссионной установке машины.
-
2. Элементы дополнительного привода от ГОП к СПМ вместе с самими СПМ образуют достаточно совершенный резервный (дополнительный, аварийный) зубчато-фрикционный МП типа двухступенчатого планетарного, который может использоваться при выходе ГОП из строя или при ее отключении с целью сохранения ресурса при движении машины в несложных дорожных условиях. Кроме того, фрикционные управляющие элементы дополнительного привода позволяют защищать ГОП от динамических перегрузок в переходных процессах управления поворотом машины, тем самым, позволяя повысить точность управления машиной и увеличить рабочий ресурс ГОП.
-
3. Бесступенчатый МП независимого (бортового) типа позволяет применить в трансмиссии центральную КП, работающую без разрыва потока мощности при переключениях передач [1215], и обеспечить возможность торможения машины двигателем путем передачи тормозной мощности от движителя к двигателю через СПМ и ГОП. При таком способе торможения машины двигателем значительная часть тормозной мощности утилизируется внутри самой ГОП в виде внутренних потерь и, кроме того, имеется возможность за счет регулирования производительности насоса ГОП выводить двигатель машины на максимально допустимый скоростной режим с целью увеличения эффективности торможения.
-
4. Бесступенчатый МП независимого (бортового) типа позволяет обеспечить вращение машины на месте в любом направлении и на любое число оборотов с радиусом поворота, равным половине колеи машины, с передачей мощности от двигателя к движителю через центральную КП и СПМ с нулевой мощностной загрузкой ГОП путем применения дополнительной простейшей управляемой зубчатой передачи с передаточным числом, равным минус единице, связывающей между собой солнечные зубчатые колеса СПМ [16, 17].
Список литературы Трансмиссия быстроходной гусеничной машины с центральной коробкой передач и бесступенчатым механизмом поворота
- Военные гусеничные машины: Учебник/В 4-х т. Т. 1. Устройство. Кн. 2. -М.: МГТУ им. Н.Э. Баумана, 1990. -336 с.
- Конструкция и расчет танков и БМП/В.А Чобиток. и др. -М.: Изд-во МО СССР, 1984. -375 с.
- Основные боевые танки/Б.А. Курков и др.; Под ред. Б.С. Сафонова и В.И. Мураховского. -М.: Арсенал-Пресс, 1993. -192 с.
- Трансмиссии некоторых зарубежных ВГМ легкой весовой категории./Зарубежная военная техника. Серия III. Бронетанковая техника и вооружение. Вып.11, сентябрь 1979. -С. 21-37.
- Васильченков В.Ф. Военные гусеничные машины. Учебник. В двух частях. Часть I. Трансмиссия и приводы управления. Часть II. Ходовая часть, системы управления, жизнеобеспечения и коллективной защиты. -Рыбинск: Изд. ОАО «РДП». Рязань: ВАИ, 1998. -560 с. (Ч. I); 448 с. (Ч. II).
- Гидроприводы органов поворота транспортных средств. Патентный обзор, часть I. -М.: Госкомитет СССР по делам изобретений и открытий, 1979. 259 с. (Патент ФРГ № 1.480.725, авторское свидетельство СССР № 450.735 и др.).
- Филичкин Н.В. Гидромеханическая трансмиссия гусеничной машины с гидрообъемной передачей пониженной мощности в механизме поворота//Вестник ЮУрГУ. Серия «Машиностроение». -2003. -Выпуск 3.-№1 (17). -С. 94-104.
- Hydrostatic transmission for steering high speed military track laying fighting vehicles/Bagget F.W. «Int. Conf. Integr. Engine Transmiss. Syst., Bath, 89 July, 1986». London, 1986. -P. 163-176.
- Бурцев С.Е. Основы применения гидрообъемных вариаторов в танковых трансмиссиях -Киев: Изд. Киевского высшего танкового инженерного училища им. ИИ. Якубовского, 1983.-225 с.
- Филичкин Н.В. Анализ планетарных коробок передач транспортных и тяговых машин. Учебное пособие. -Челябинск: Изд-во ЮУрГУ, 2005. -176 с.
- Патент РФ № 2.233.760 на изобретение «Бесступенчатый механизм поворота быстроходной гусеничной машины»/Н.В. Филичкин Приоритет 31.03.2003. Рег. 10.08 2004. Бюл. № 22.
- Филичкин Н.В. Планетарные коробки передач с переключением передач без разрыва потока мощности//Конструирование и эксплуатация наземных транспортных машин: Сборник трудов. -Челябинск: Изд. ЮУрГУ, 2002. -С. 27-31.
- Филичкин Н.В. Планетарная коробка передач, работающая без разрывов потока мощности//Вестник ЮУрГУ. Серия «Машиностроение». -2003. -Выпуск 3. -№1(17). -С. 83-93.
- Филичкин Н.В., Пермяков В.А. Коробки передач самоходных машин, работающие без разрывов потока мощности при переключениях передач//Многоцелевые гусеничные и колесные машины: актуальные проблемы теории и практики, научная работа и образование: Сборник трудов Международной научно-технической конференции, посвященной 100-летию со дня рождения Н.Л. Духова. -Челябинск: Изд-во ЮУрГУ, 2005. -С. 125-140
- Патент РФ № 2.207.459 на изобретение «Планетарная коробка передач транспортного средства»/Н.В. Филичкин, В.Н. Тимонин. Приоритет 18.03.2003. Рег.27.07.2003. Бюл. № 18.
- Патент РФ № 31.225 на полезную модель «Механизм поворота транспортного средства»/Н.В. Филичкин, В.Н. Тимонин Приоритет 29.08.2001. Рег.27.06 2003. Бюл. № 21.
- Патент РФ № 2.261.189 на изобретение «Механизм поворота транспортного средства (варианты)»/Н.В. Филичкин, B.C. Березин, В.Н. Тимонин, В.А. Пермяков Приоритет 9.03.2004. Рег.27.09 2005. Бюл. № 27.
