Трехмерная интегральная модель сухого трения для движения прямоугольного корпуса

Автор: Салимов М.С., Меркурьев И.В.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Механика
Статья в выпуске: 1 т.21, 2021 года.
Бесплатный доступ
Введение. Исследуется трехмерная модель сухого трения при взаимодействии прямоугольного тела и горизонтальной шероховатой поверхности. Предполагается, что отрыв корпуса от горизонтальной поверхности отсутствует. Движение тела происходит в условиях комбинированной динамики, когда помимо продольного движения тело участвует в верчении.Материалы и методы. Предложены дробно-линейные аппроксимации Паде, которые заменили громоздкие аналитические выражения, наиболее точно описывающие движение тел по шероховатым поверхностям. Предложены новые математические модели, описывающие скольжение и верчение тел с прямоугольным основанием.Результаты исследования. Разработаны и научно обоснованы аналитические выражения главного вектора и момента сил трения для прямоугольных площадок контакта. Разработана модель трения, которая учитывает взаимосвязь между скоростями скольжения и верчения, позволяющая находить решения для зависимостей Паде. После численного решения уравнений движений, получены и построены зависимости скорости скольжения и угловой скорости от времени. Построены графики зависимостей сил трения и их момента от угловой скорости и скорости проскальзывания, которые позволили сравнить интегральную и нормированную модели трения. Результаты сравнения показали хорошее соответствие интегральной модели и модели на основе аппроксимаций Паде.Обсуждение и заключения. Полученные результаты позволяет учесть динамическую связь компонентов, которая определяет силовое взаимодействие прямоугольного корпуса и горизонтальной поверхности. Эти результаты могут быть использованы в мобильной робототехнической сфере. Анализируемое движение корпуса происходит за счет управления движением материальной точки внутри корпуса. Такие мобильные роботы могут использоваться при решении широкого класса задач: при создании автономных роботов для исследования космического пространства и планет; при диагностике и лечении в части прохождения по сложным структурам вен и артерий; при исследованиях под водой, в местах больших перепадов температур; при подземных работах.
Сухое трение, прямоугольное тело, твердое тело, динамика, скольжение, верчение, сила трения, аппроксимации паде
Короткий адрес: https://sciup.org/142229407
IDR: 142229407 | УДК: 531.36 | DOI: 10.23947/2687-1653-2021-21-1-14-21
Three-dimensional integral dry friction model for the motion of a rectangular body
Introduction. A three-dimensional dry friction model in the interaction of a rectangular body and a horizontal rough surface is considered. It is assumed that there is no separation of the body from the horizontal surface. The body motion occurs under the conditions of combined dynamics when, in addition to the longitudinal movement, the body participates in twisting.Materials and Methods. Linear fractional Pade approximations are proposed, which replaced the cumbersome analytical expressions that most accurately describe the motion of bodies on rough surfaces. New mathematical models describing sliding and twisting of bodies with a rectangular base are proposed.Results. Analytical expressions of the principal vector and moment of friction for rectangular contact areas are developed and scientifically established. A friction model that takes into account the relationship between sliding and twisting speeds, which provides finding solutions for Pade dependences, is developed. After numerical solution to the equations of motion, the dependences of the sliding speed and angular velocity on time were obtained and constructed. Graphs of the dependences of the friction forces and their moment on two parameters (angular velocity and slip velocity) were constructed, which enabled to compare the integral and normalized models of friction. The comparison results showed good agreement of the integral model and the model based on Pade approximations.Discussion and Conclusions. The results obtained provide considering the dynamic coupling of components, which determines the force interaction of a rectangular body and a horizontal surface. These results can be used in mobile robotics. The analyzed motion of the body occurs through the motion control of a material point inside the body. Such mobile robots can be used when solving a wide class of problems: when creating autonomous robots for the exploration of outer space and planets; in the diagnosis and treatment in case of passing through complex structures of veins and arteries; in research under water, in places of large differential temperature; in underground operations.
Текст научной статьи Трехмерная интегральная модель сухого трения для движения прямоугольного корпуса
УДК 539.377: 004.942
Введение. Решение задачи о толстостенной сферической оболочке, испытывающей разные внешние воздействия, приводится в монографиях [1, 2] и ряде научных статей по теории упругости, пластичности, термоупругопластичности [3–9]. Обычно рассматривается случай, когда процесс нагружения является простым.
Задача о толстостенной сферической оболочке является одной из простейших упругопластических задач, когда поля внешних воздействий и внутренних параметров обладают центральной симметрией. В силу центральной симметрии в пластической области выполняется режим полной пластичности. Для идеального пластического тела задача статически определимая, что позволяет ее решить для любых условий пластичности. В монографии [1] приведено наиболее полное решение задачи о сферической оболочке, когда не учитывается зависимость предела пластичности от температуры, а условие пластичности не зависит от первого инварианта тензора напряжений и знака третьего инварианта девиатора напряжений. Рассматриваются случаи только теплового и комбинированного нагружения, когда задана температура на стенках сферы, давление на внутренние стенки, а на внешней стенке давление отсутствует. В работах [10–13] выполнено исследование термоупругопластического состояния разных объектов, а в [3–9] рассмотрен процесс теплового нагружения и разгрузки свободного от внешних усилий шара и полого шара для условия Треска с учетом зависимости предела пластичности от температуры. Решение этой и аналогичных задач представляет интерес, поскольку можно получить аналитическое или частично аналитическое решение для разных математических моделей. Аналитическое решение можно получить при выборе кусочно-линейных функций пластичности [11, 13]. Математическое моделирование объектов позволяет прогнозировать их состояние и поведение в зависимости от значений исходных параметров [14, 15].
Механика
Материалы и методы. Постановка задачи . Рассматривается задача о толстостенной сферической оболочке (полом шаре), испытывающей центрально симметричные внешние воздействия: давление pb на внешнюю стенку при p = b и давление pa на внутреннюю стенку при p = а . Также рассматривается тепловое воздействие на шар: на границе р = а поддерживается температура Та , на границе р = b — температура Tb . Предполагается, что шар проявляет упругие и пластические свойства. Искомыми параметрами состояния в каждой точке шара являются компоненты тензора напряжений, компоненты тензоров деформаций и векторы перемещений. В области упругого состояния упругие деформации являются полными (остаточные деформации отсутствуют).
Основные соотношения . Все соотношения приведены к безразмерному виду. В качестве масштаба длины выбирается внешний радиус шара b . Все величины, имеющие размерность напряжений, отнесены к пределу пластичности при одноосном растяжении к . Масштабная единица для температуры — 1 С.
В силу указанной симметрии внешних воздействий, в сферической системе координат р, 0, ф матрицы компонент тензора напряжений и деформаций будут иметь вид:
|
ч |
0 |
0 ^ |
Ч |
0 |
0 ' |
||
|
(о) = |
0 |
ст0 |
0 |
, (е) = |
0 |
£0 |
0 |
|
1 0 |
0 |
ст |
1 0 |
0 |
£ф > |
В данном случае выполняются равенства н0 = аф, е0 = еф.
Если функции пластичности не зависят от первого инварианта тензора напряжений и знака третьего инварианта девиатора напряжений, то при решении задачи о шаре функции пластичности будут приводиться к виду:
-
f =1 ° 0 -° р 1= к .
Рассмотрим условие пластичности:
^((ст -5ep)w + 2(ст-5еp)w)w f (CT CT £ P £ P ) = pp—07
-
7 p , 0 , p , 0 ^ + n (1 + а )1/ m
п (( | ст-ст -5 ( s p -e p)\ m + а ( ст -ст-5 ( е p -e p ) m ) m
0 p 0 p p 0p 0
Чпа+оГ” ", где ep, ep — компоненты тензора пластических деформаций; T — температура.
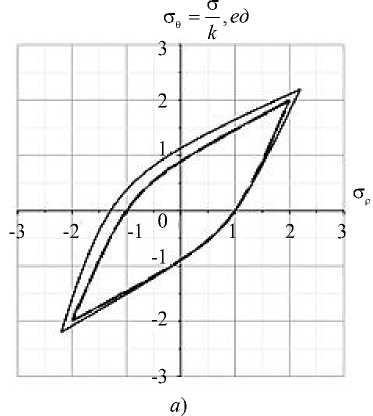
Когда параметры имеют значения: <; = 0, п = 1,5 = 0, а = 0, m = 1, ц = 0, к = к0, из условия (2) следует условие (1). На рис. 1 в плоскости CTp, ст0 представлены кривые пластичности, определяемые по формуле (2) для разных значений числовых коэффициентов в функции пластичности.
= к ’ ед
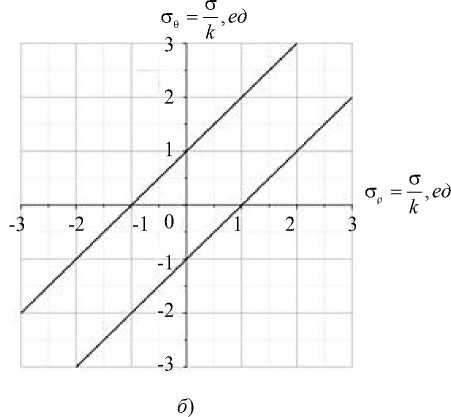
Рис. 1. Кривые пластичности: а — для параметров: <; = 0,2; w = 2; п = 0,5; 5 = 0; m = 3; к = 1; сплошная линия а = 0,5; пунктирная линия а = 0; б — для параметров: а = 0; ^ = 0; 5 = 0; к = 1
Результаты, представленные на рис. 1, показывают, что при учете первого инварианта тензора напряжений радиальное и окружное напряжения, когда точка шара находится в упругом состоянии, могут изменяться в ограниченном диапазоне. Соответственно давление на границы шара также должно быть ограниченным. Когда первый инвариант в условии пластичности не учитывается, упругое состояние возможно для любого значения давления на границах шара, но ограничен перепад давления Ap = pa - pb. Учет знака третьего инварианта девиатора напряжений, как отмечалось выше, влияет на значения пределов пластичности.
Если значения параметров состояния ор,ои определяют точку области, ограниченную кривой пластичности, принимается, что определяющими уравнениями, связывающими напряжения и деформации, являются соотношения закона Дюамеля-Неймана [1,2]:
E е„ = (1 -v)o„-vo + E a T , E е = о - 2vo„ + E а T , (3)
-
и и р р р и
- где модуль Юнга E и коэффициент Пуассона v — константы.
Если параметры состояния ор, ои определяют точки на кривой пластичности, то принимается аддитивное представление полных деформаций через обратимые и необратимые деформации:
ep ep еи еи + еи , °р °р + °р •
Полные деформации определяются через перемещения по формулам:
е
и
u
,
р
ер
du d р
Полные деформации связаны условием совместности деформаций:
d е r - + е„-е = 0. dr 6 р
Приращения необратимых деформаций связаны с напряжениями нормальным законом:
d еР = d еР df / dOu df / дОр •
Соотношение (7) при выборе нелинейных функций пластичности в общем случае неинтегрируемое [16]. В квазистатическом приближении напряжения должны удовлетворять уравнению равновесия:
d о р 2(gp-g ) = 0. (8)
d р
Эквивалентное напряжение. Эквивалентное напряжение — это выпуклые изотропные скалярные функции тензора напряжений. В частных случаях термин «эквивалентное напряжение» является синонимом других терминов, например, «интенсивность напряжений» [17]. В настоящей работе эквивалентное напряжение совпадает с функцией пластичности. В этом случае на упругопластической границе эквивалентное напряжение не будет иметь разрыва.
Поле температур. Поле температур в шаре находится из решения краевой задачи [1]:
Г d 2 t dT , р--- + 2— = 0, < d р 2 d р (9)
T | = T , T | = T .
Iр= a a , 1р= b b
Решение задачи (9) представим в виде:
T = T + - a A T -1 b - 1 1 , A T = T - T . (10)
b , a b
( b - a ) ^p J
Упругая область. В области упругого состояния полого шара формулы для напряжений имеют вид:
, В X . В X , abEaAT о = A +---, о = A----, X =-----------.
р р 3 р u 2 р 3 2 р (1 -v )( b - a )
Пластическая область. Выберем условия (1). Рассмотрим случай только теплового воздействия (10).
Тогда пластическая область будет зарождаться на внутренней границе оболочки при условии [1]:
Механика
0 = _E a_| A t h^ 2 a ‘ + ab + b :) k .
(1 -v ) 1 b ( a + 2 b )
Обозначим через с , — радиус упругопластической границы р = с 1. В процессе нагружения, когда в > в , , пластическая область a < р < с 1 увеличивается. При выборе условия (1) напряжения в области a < р < с 1 вычисляются по формулам:
Op) = 2к k ln(P / a), Gp) = Gp) +Ki k, к = sign (g6—gp), где к1 = sign(g6 — gp ) |p=с . Если AT > 0, то к1 = —1, если AT < 0, то к1 = +1.
Если область с1 < р < b остается упругой, то величины A , B и радиус упругопластической границы с1 определяются из условий непрерывности напряжений на упругопластической границе и граничного условия g |р=b = 0. Так, если A и B определяются только упругопластической границе, то имеют место выражения:
Г Г c j 1 j X
A = 2 к1 k I ln I 1 I + — 1+-- ,
( ( a J 3 J 3 c 1
из условий непрерывности напряжений на
R X с 2 2 . 3 B = — к, kc, .
Уравнение для вычисления с 1 будет иметь вид:
„ , [, Г c. j 12
2 к. k In 1 +
1 I I a J 33
^^^^^^B
+ | —+— 1 |x = 0. ( 3c1 3 b 3 b J
c 1
Если A и B определяются из условий непрерывности напряжений на упругопластической границе и условия g |p = b = 0 , то имеют место выражения:
A = I 1 —
c 2 jX 2 к kc 3 X c .2 2
— + —1—L, B = —1---к kc ,^.
3 b 2 J b 3 b3 3 3 1 1
Выбор формул (11) или (13) влияет на шаги алгоритма решения задачи, но не влияет на окончательные результаты.
На границе р = b будет зарождаться вторая пластическая область, если выполняется условие:
(G 6 — G p )| p= b =к 2 k , к 2 = —к 1 .
Для определения значения A T = A T , когда выполняется условие (14), необходимо решить совместно систему уравнений (12), (14). Поскольку параметр в в уравнения (13) и (1) входит линейно, то можно получить отдельно уравнение для определения радиуса упругопластической границы:
2 к1 k ln I ' X 4'•( b - ^ =1 ( a J 3( b + c 1) bc1
—
b 2 ) = 0,
а также формулу для вычисления параметра в :
в = в = 2 k 0( к 2 b 3 — к 1 c 3)( b — a ) р р 2 ( b2 — c 2) ab
.
В процессе дальнейшего нагружения, когда выполняется неравенство в > в 2, область шара c 2 < р < b переходит в пластическое состояние на границе р = b .
Полый шар при тепловом воздействии. Учет упрочнения материала. Рассмотрим случай, когда условие пластичности имеет вид:
f( g p , Ge , e p , e p) = 1 Ge — g p — 8 ( e p —< ) = k .
Если до нагружения в шаре остаточные деформации отсутствуют, то в результате теплового нагрева пластическая зона будет зарождаться на внутренней границе р = a , когда выполняются условия (15), (16). При дальнейшем нагружении образуется пластическая область a < р < c1 . Для нахождения напряжений в этой области надо из системы уравнений (3–6), (8), (17) получить соответствующие уравнения:
р 2
G
d 2°р d p 2
d g
+ 4p—^ — dp 1 + 38(1 — v)
8 abE aA T j = 0 p ( b — a ) J ,
P d g ---+ g .
2 d p p
Решение системы (18) запишем в виде:
Gp
Ge
1 + 3 8 (1 — v )
1 + 3 8 (1 — v )
| 2 k In p
3 8 abE aA T
^^^^^^B
p ( b — a ) J
3 8 abE aA T k + 2 k In p-- 2 p ( b — a )
C 1
+ 2 ,
p
V C + C 2 .
J 2 p
Величины C1, C2, входящие в формулы (19), определяются из граничного условия ср |р=a = 0 и условий отсутствия пластических деформаций на упругопластической границе р = с1:
C = 2 к ( k - k ) c 3 - 3 E a N.c 2 , 1 1 3 1 3 1
C = 2к. k, ln a + 2 1 3
2 к. ( k - k, ) c 3 E a N
1 v 3 X 1 + 6
3 a 3
c 1
a
—
a
3 ab A T
.
Ns =---------------
3 (1 + 3 3 (1 -v ))( b - a )
В результате подстановки (20) в (19) получим:
c =-------- р 1 + 33(1 -v)
2 к 1 k In -P + a
3 3 abE aA T f 1 1
--—
-
2 к. kc 3 3 abc 2 E aA T
11 1
b - a
1 a 3
-
С =-------
6 1 + 3 3 (1 -v )
-
к 1 kc 3
b - a
a р
P 3
2к. kc 3 + —1—L
-
3 ( a 3 р 3
,
к 1 k + 2 к , k In -р +
3 abc 2 E aA T ¥ 2
2( b - a )
a
3 3 abE aA T f 1 1
a
P
b - a
к kc 3 + — -
---— a 2 р)
a р
Из решения упругой задачи следует: если A T > 0, то к 1 =
—
Учет пластической сжимаемости. Рассмотрим линейной относительно компонентов тензора напряжений:
1; если A T < 0, то к 1 = + 1.
случай, когда функция пластичности является
? (2 С6+Ср ) + к ( сб-ср ) + П ( С6 к = sign ( С б- С р ).
-
С р ) = k о (1 -X T ),
Условие пластичности (21) можно представить в виде: аС б +Р^ р = k (1 -X T ), a = 2 g + к-n , P = д-к + п .
С учетом введенных обозначений, задачу:
для определения напряжений
в пластической области получаем
Решение задачи (22) имеет вид:
С
- Pa +
( M x - 1) k о
c6
-
P
a
-
a^+Pc = k (1 -X T), d С р 2(Ср-Сб) = 0, d р c | = - p .
р 1р= a p a
2 Nk 0 ) ¥Y+2P/a M - 1
X 0 a X____
a + P a ( a + 2 P ) )(р
-
2 N ,
a + P р ( a + 2 P )
k 0 ,
( M - 1) k 2 Nk Y a Y+2P / “
■ P +—x------+----X — II I a a + P a (a + 2P) )(р)
-
M - 1 N
——+--X— k, a + P р(a + 2P) J 0
a AT ab A T где введены обозначения: M = 1, - , N = , M =xM, N =XN • b - a b - a X X
Для получения правильного результата из (20), когда, например, a + P = 0, надо выполнить предельный переход при решении (22). Более просто получить правильный результат можно непосредственно в (23), при этом учесть, чтобы выполнялось условие a + P = 0 . В этом случае g = 0, поэтому получим:
-
2 k o I р I 11 II
c = —0 (1 - M ) ln + - N - p ,
X X a a ( a (р a J J
( I
С б = -° I (1 - M X )(1 + In р ) + N x| - - - I I- Pa • a ( a (р a))
В процессе нагружения пластическая зона зарождается на границе р = a , когда выполняется условие:
Механика
A T = к o (1 -x T b )/ | k o X —
(2 ^ + к - n )( a + 2 b ) bE a 2(1 -v )( a 2 + ab + b 2)
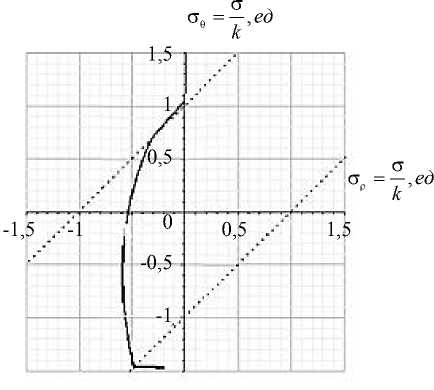
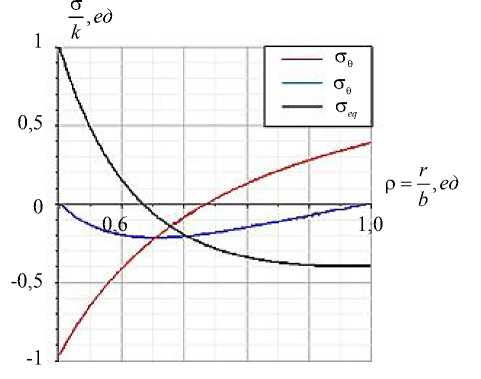
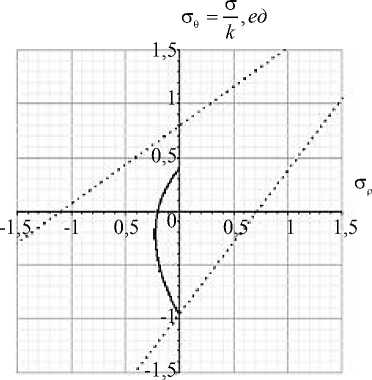
Результаты исследования. На рис. 2 приведены графики напряжений и годографов вектора напряжений, когда область шара, соответствующая условию а < р < с1, находится в пластическом состоянии, а области шара, соответствующая условию с1 < р < b, — в упругом состоянии.
k ’ ед
0,5
-0,5
-1
р = r- , ед b
a )
---- СТ------- СТ
р
------- СТ eq
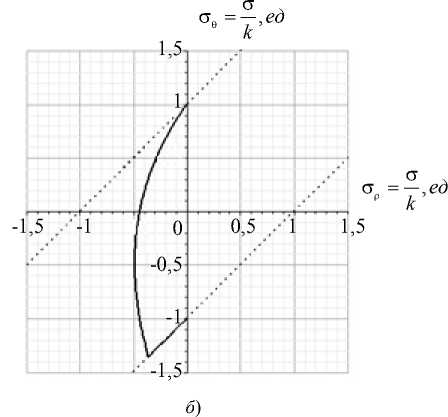
Рис. 2. Графики напряжений ( a ) и годографов вектора напряжений ( б ) при значениях параметров: к = 1; v = 0,3; а = 0,5; b = 1; A T = 170; с = 0,57
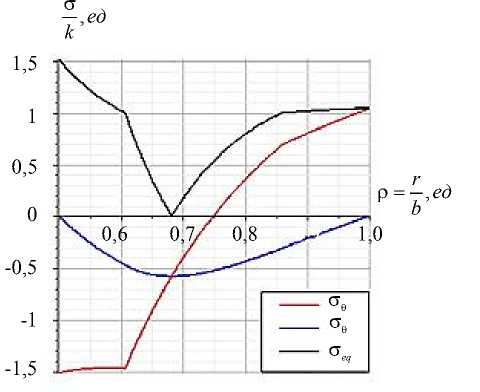
На рис. 3 приведены графики напряжений и годографов вектора напряжений, когда области шара, соответствующие условиям а < р < с1 и с2 < р < b, находятся в пластическом состоянии, а область шара,
соответствующая условию с 1 < р < с 2, — в упругом состоянии.
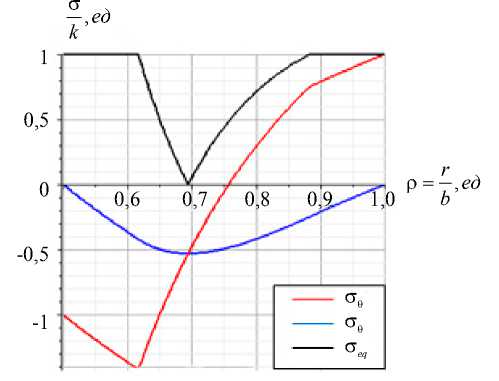
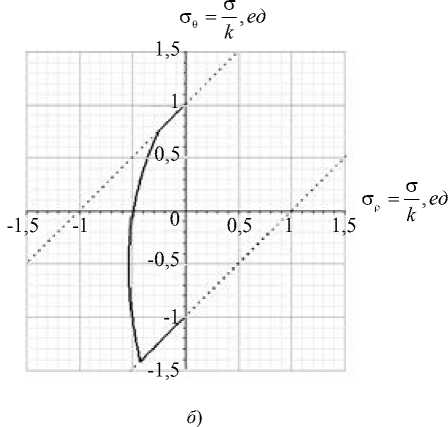
Рис. 3. Графики напряжений ( a ) и годографов вектора напряжений ( б ) при значениях параметров: v = 0,3; а = 0,5; A T = 270; с 1 = 0,62; с 2 = 0,88
На рис. 4 приведены графики напряжений и годографов вектора напряжений, когда область шара, соответствующая условию а < р < с 1 , находится в пластическом состоянии, а область шара, соответствующая условию с 1 < р < b , — в упругом состоянии.
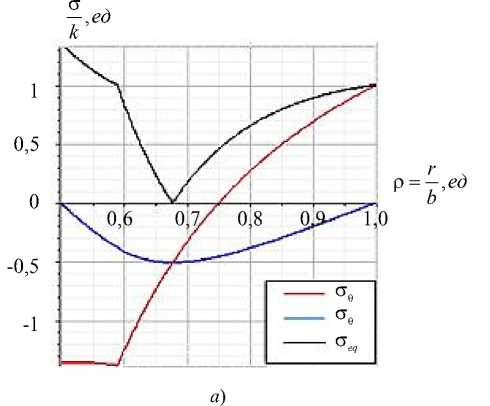
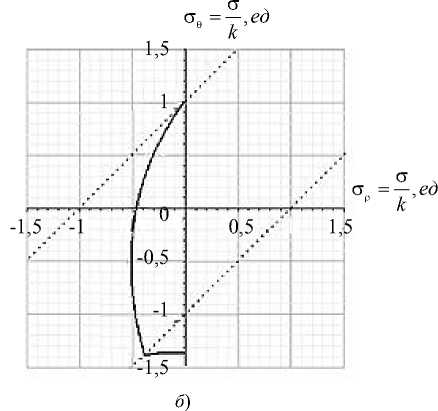
Рис. 4. Графики напряжений ( a ) и годографов вектора напряжений ( б ) при значениях параметров: ν= 0,3; a = 0,5; ∆ T = 215; с 1 = 0,58
На рис. 5 приведены графики напряжений и годографов вектора напряжений, когда области шара, соответствующие условиям a≤ρ≤c1 и c2 ≤ρ≤b, находятся в пластическом состоянии, а область шара, соответствующая условию c1≤ρ≤c2, — в упругом состоянии.
a)
Рис. 5. Графики напряжений ( a ) и годографов вектора напряжений ( б ) при значениях параметров: ν= 0,3; a = 0,5; ∆ T = 270; с 1 = 0,61; с 2 = 0,86
б )
На рис. 6 приведены графики напряжений и годографов вектора напряжений, когда области шара, соответствующие условиям a ≤ρ≤ c 1 и c 2 ≤ρ≤ b , находятся в пластическом состоянии, а область шара, соответствующая условию c 1 ≤ρ≤ c 2— в упругом состоянии.
Механика
a )
Рис. 6. Графики напряжений ( a ) и годографов вектора напряжений ( б )
при значениях параметров: ν=0,3; a =0,5; ∆ T =79; ς =0,1; η =0,1; E α =0,012; χ=0,0017
б )
Обсуждение и заключения. Результаты вычислений показывают, что в данной постановке задачи, когда имеет место только тепловое воздействие, полый шар полностью не переходит в пластическое состояние (рис. 2–6). Упрочнение приводит к увеличению эквивалентного напряжения в пластической области и уменьшению радиуса упругопластической границы (рис. 4, 5). Упругая область в процессе нагружения не может полностью исчезнуть. Пластическая сжимаемость и зависимость предела пластичности от температуры оказывают существенное влияние на напряженное состояние полого шара (рис. 6).
Список литературы Трехмерная интегральная модель сухого трения для движения прямоугольного корпуса
- Салимов, М. С. Движение тела на вибрирующей поверхности в случае сухого трения / М. С. Салимов, Н. С. Рамзин // Проблемы машиностроения и автоматизации. — 2019. — № 4. — С 100-104.
- Munitsyn, L. V. Vibrations of a Rigid Body with Cylindrical Surface on a Vibrating Foundation / L. V. Munitsyn // Mech. Solids. — 2017. — Vol. 52, no. 6. — P. 675-685.
- Voldrich, J. Modelling of the three-dimensional friction contact of vibrating elastic bodies with rough surfaces / J. Voldrich // Appl. Comput. Mech. — 2009. — Vol. 3, no. 1. — P. 241-252.
- Chowdhury, M. A. Sliding friction of steel combinations / M. A. Chowdhury [et al.] // Open Mech. Eng. J. — 2014. — Vol. 8, no. 1. — P. 364-369.
- Martinovs, A., Gonca, V. Descriptive model of sliding friction processes / A. Martinovs, V. Gonca // Vide. Tehnologija. Resursi. — Environment. Technology. Resources. — 2009. — Vol. 2. — P. 227-233.
- Журавлёв, В. Ф. О модели сухого трения в задаче качения твердых тел / В. Ф. Журавлёв // Прикладная математика и механика. — 1998. — Т. 62, № 5. — С. 762-767.
- Андронов, В. В. Сухое трение в задачах механики / В. В. Андронов, В. Ф. Журавлёв. — Москва. Ижевск : R&C Dynamics, 2010. — 184 c.
- Acary, V., Bremond, M., Huber, O. On solving contact problems with coulomb friction: Formulations and numerical comparisons / V. Acary, M. Bremond, O. Huber // In: Transactions of the European Network for Nonsmooth Dynamics on Advanced Topics in Nonsmooth Dynamics. Springer International Publishing, 2018. — P. 375-457.
- Haslinger, J., Kucera, R., Sassi, T. A domain decomposition algorithm for contact problems with Coulomb's friction / J. Haslinger, R. Kucera, T. Sassi // Lect. Notes Comput. Sci. Eng. — 2014. — Vol. 98. — P. 889897.
- Киреенков, А. А. Связанная модель трения скольжения и верчения / А. А. Киреенков // Доклады Академии наук. — 2011. — Т. 441, № 6. — С. 750-755.
- Журавлёв, В. Ф. О разложениях Паде в задаче о двумерном кулоновом трении / В. Ф. Журавлёв, А. А. Киреенков. // Известия Российской академии наук. Механика твердого тела. — 2005. — № 2. — С. 3-13.
- Santos, A. P. Granular packings with sliding, rolling, and twisting friction / A. P. Santos [et al.] // Phys. Rev. E. — 2020. — Vol. 102, iss. 3. — P. 032903.
- Киреенков, А. А. Трехмерные модели трения / А. А. Киреенков // Вестник Нижегородского университета им. Н. И. Лобачевского. — 2011. — Т. 4, № 2. — С. 174-176.
- Сахаров, А. В. Поворот тела без внешних движителей при помощи ротора / А. В. Сахаров // Труды Московского физико-технического института. — 2014. — Т. 6, № 2. — С. 80-91.
- Журавлёв, В. Ф. Закономерности трения при комбинации скольжения и верчения / В. Ф. Журавлёв // Известия Российской академии наук. Механика твердого тела. — 2003. — № 4. — С. 81-89.
- Киреенков, А. А. Закон Кулона в обобщенной дифференциальной форме в задачах динамики твердых тел с комбинированной кинематикой / А. А. Киреенков // Известия Российской академии наук. Механика твердого тела — 2010. — № 2. — С. 15-26.
- Gluzman, S., Yukalov, V. I. Self-similarly corrected Pade approximants for nonlinear equations / S. Gluzman, V. I. Yukalov // Int. J. Mod. Phys. B. — 2020. — Vol. 33, no. 29. — P. 1-23.
- Baker G. A., Graves-Morris, P. Pade approximations / G. A. Baker, P. Graves-Morris // Encyclopedia of Mathematics and its Applications, Series no. 59, 2nd ed. — Cambridge University Press, 1996. — 764 p.
- Киреенков, А. А. Связанная модель трения скольжения и качения в динамике тел на шероховатой и плоскости / А. А. Киреенков // Известия Российской академии наук. Механика твердого тела. — 2008. — № 3. — С. 116-131.
