Underwater robot technology and future trend analysis

Author: Liang Chuanming
Journal: Бюллетень науки и практики @bulletennauki
Section: Технические науки
Article in issue: 9 т.8, 2022.
Free access
Underwater positioning and navigation is a technology that provides the attitude, speed, position and other information of underwater robots. It is the premise for underwater robots to successfully complete various underwater tasks. The underwater environment is complex and changeable, and a single positioning and navigation technology will inevitably not meet the needs of long-range, multi-target and high-precision. The navigation system of the future underwater intelligent robot integrates the integrated navigation mode of various technologies. This paper discusses the basic underwater positioning and navigation mode and integrated navigation mode, describes the development process of underwater positioning and navigation technology, compares the research methods and progress of Chinese and foreign scholars, analyzes the current research bottlenecks and technical difficulties, and points out the direction for future research, which can be used as a reference for the follow-up research of underwater robot positioning and navigation system.
Underwater robot, positioning and navigation, integrated navigation, global satellite navigation system, geophysical navigation
Short address: https://sciup.org/14125328
IDR: 14125328 | UDC: 629.127 | DOI: 10.33619/2414-2948/82/45
Технология подводных роботов и анализ будущих тенденций
Подводное позиционирование и навигация - это технология, которая обеспечивает положение, скорость и другую информацию о подводных роботах. Это предпосылка для успешного выполнения подводными роботами различных подводных задач. Подводная среда сложна и изменчива, и единая технология позиционирования и навигации неизбежно не будет удовлетворять потребности в дальности, многоцелевости и высокой точности. Навигационная система будущего подводного интеллектуального робота объединяет интегрированный навигационный режим различных технологий. В статье обсуждаются базовый режим подводного позиционирования и интегрированный режим навигации, описывается процесс разработки технологий подводного позиционирования и навигации, сравниваются методы исследования и достижения китайских и др. зарубежных ученых, анализируются текущие узкие места и технические трудности исследований, а также указывается направление будущих исследований, которое может быть использовано в качестве ориентира для последующих исследований системы позиционирования и навигации подводных роботов.
Text of the scientific article Underwater robot technology and future trend analysis
Бюллетень науки и практики / Bulletin of Science and Practice
UDC 629.127
Since the middle and late of the last century, unmanned underwater vehicle (UUV) has attracted the attention of more and more countries. Due to its good concealment, it can carry multi- purpose sensors, equipment or weapons, and can perform special tasks such as mine sweeping and anti submarine, it has the advantages of high efficiency and cost ratio, mobility and flexibility, recyclability and reuse, and all countries in the world are vigorously carrying out the scientific research work of UUV. UUV can be divided into remote operated vehicle (ROV) and autonomous underwater vehicle (AUV) according to different control types. Because AUV is different from ROV, it has no umbilical connection with surface personnel, navigation and positioning completely depends on autonomy, and AUV's own volume and energy reserves are limited, so it is very important for AUV to develop a navigation and positioning system with low energy consumption, multi-target, long range and high positioning accuracy for whether it can succeed in long-distance multi-purpose tasks (Figure 1). The following mainly introduces several basic navigation modes of UUV, and emphatically lists several integrated navigation systems that have been studied at home and abroad in recent years, analyzes their system principles, compares their advantages and disadvantages, and puts forward the current technical difficulties and future research directions [1].
Underwater robot, also known as unmanned underwater vehicle, is a controllable machine structure that operates in the extreme underwater environment and can dive into the water to replace people to perform certain actions [2]. Underwater unmanned underwater vehicles can generally be divided into three categories: remotely operated underwater vehicles (ROVs), manned underwater vehicles (hovs) and intelligent underwater vehicles (AUVs), as shown in T able.
CLASSIFICATION OF UNDERWATER VEHICLES
Table
|
Classification |
Characteristic |
Shortcoming |
|
Manned underwater vehicle (HOV) |
The operation is precise and controllable, and instant information transmission can be carried out |
The cost is high, which may endanger the safety of passengers |
|
Remotely operated underwater vehicle (ROV) |
Strong information dissemination ability and stable power source |
Limited scope of activities |
|
Intelligent underwater vehicle (AUV) |
High flexibility and wide range of activities |
The activity time is short, and communication is difficult |
Figure 1. Manned underwater vehicle (HOV)
In terms of mechanical structure, underwater robot can generally be divided into two parts: underwater controller and underwater submersible system (Figure 2, 3). The underwater controller is mainly divided into core controller, control and servo system, indication system, positioning system and communication control system; According to the use purpose and operation method, underwater robots can be divided into streamline and frame type, mainly including sealed pressure shell, propulsion system, communication and navigation system, detection and sensing system, core control system and other components [3, 4].

Figure 3. Intelligent underwater vehicle (AUV)
Figure 2. Remotely operated underwater vehicle (ROV)
The designer should reasonably design the configuration of the propulsion system according to the power supply mode used by the robot, and strive to make the propulsion system have sufficient propulsion speed and maneuverability that can meet the task index when its own mass, volume and energy consumption meet the standard [5, 6].
Underwater acoustic and photoelectric communication technology is the most widely used underwater robot communication technology. How to better solve the transmission of control commands and equipment information feedback is an urgent problem in the field of underwater robot communication. Underwater acoustic tracking technology, GPS and Doppler velocity sonar technology are the technologies that underwater robots rely on for navigation and positioning at present [7].
The underwater automatic robot control includes the integrated and unified management of the motion posture of the submersible under six degrees of freedom, and the control sensors and actuators. In AUV, it also includes the design of intelligent algorithm for autonomous planning mission objectives and paths for underwater vehicles.
Generally speaking, at present, there is no way to design an underwater robot that can meet the needs of all tasks. Therefore, before the task, the overall structure, fluid characteristics, energy and power, control mode, communication mode and other structural functions of the robot should be reasonably allocated and designed according to the corresponding task needs [8].
Dead reckoning (DR) is a very common basic navigation method. The method is to obtain the position, attitude and speed of the underwater vehicle by using the compass and Doppler velocity log (DVL), and then integrate the time to calculate the current position. Inertial navigation system (INS) should be classified as dead reckoning navigation. The principle is similar to dead reckoning navigation. The rotating angular velocity, pose direction and acceleration of the submersible are obtained through three-axis gyroscope, three-axis accelerometer and DVL. Combined with relevant data, the time is integrated twice to calculate the current position of the submersible. Inertial navigation system can be divided into platform type and strapdown type. Compared with platform type, strapdown type has the characteristics of small volume, simple structure and convenient maintenance, which is adopted by most inertial navigation systems. In 1958, the United States Nautilus, the world's first nuclear submarine, was equipped with the more advanced inertial navigation system at that time and had a continuous submergence in the Arctic for 21 days, with a range of 15086 km and an error of only 37 km. China's research on inertial navigation system is relatively late. However, from the first AUV "Explorer" successfully developed by Shenyang Institute of automation in 1994 to the deep-sea high-precision inertial based integrated navigation system developed by Beijing Institute of automatic control equipment in 2018, the research results are quite gratifying. So far, the history of China's complete dependence on foreign underwater high-precision navigation equipment has finally been broken. However, both DR and INS will gradually increase the error with the accumulation of time, thus deviating from the original target position. Although the error can be corrected by floating to the water surface to obtain the satellite positioning signal, the energy required for floating and diving is large, which is not desirable for underwater vehicles with limited energy. How to use more auxiliary navigation technology to correct the deviation accumulated over time has become the key research direction in the future [9].
Due to the extremely serious attenuation of underwater electromagnetic waves, the propagation distance is very limited. For AUV that has been submerged in deep water for a long time, underwater acoustic navigation system has become a more mainstream underwater navigation method because of its longer propagation distance in water than radio waves and light waves [10]. The principle of underwater acoustic navigation is to determine the relative position between AUVs and acoustic beacons by calculating the transmission time and phase difference of acoustic signals between AUVs and acoustic beacons, and then obtain the position information of AUVs in the geodetic coordinate system through coordinate conversion. Underwater acoustic navigation can be roughly divided into three types, namely long baseline (LBL), short baseline (SBL) and ultra short baseline (USBL), which depend on the length of the baseline, the number of arrays and the layout position (as shown in Figure 4).
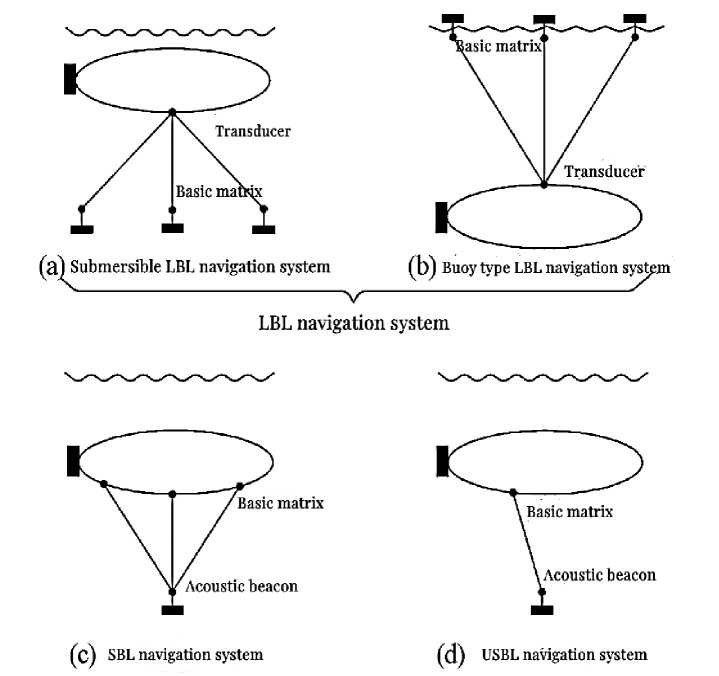
Figure 4. Schematic diagram of class III acoustic positioning and navigation system
The three navigation methods have their own advantages and disadvantages. LBL has the highest navigation accuracy, but its array deployment requires a lot of time and cost. SBL and USBL are relatively simple, but their working distance and accuracy are much smaller than LBL [11].
The underwater acoustic navigation system must be within the range of its array to play a role, so the range of action is limited, and the position error of the inertial navigation system will continue to increase with time. In order to achieve long-range and high-precision navigation tasks, SINS/DVL/LBL integrated navigation came into being. SINS/DVL/LBL integrated navigation system will not only significantly reduce the cumulative time error of the inertial navigation system, but also improve the working range of the underwater robot, so that the underwater robot can reach a longer distance on the premise of ensuring the navigation accuracy requirements. This paper expounds a SINS/DVL/LBL integrated navigation system, which verifies that the observability of SINS/DVL position error is low, and LBL can provide accurate position information for it, And then improve the observability of position error. The position accuracy of "rovins" pure inertial navigation produced by ixblue company of France is 0.1% TD. After adding USBL/LBL auxiliary navigation, its position accuracy is twice that of USBL/LBL. The complex underwater environment has caused inevitable interference data that has a serious impact on the performance of the navigation system. In terms of data processing, this paper expounds a technology of using UKF to fuse multi-sensor data, which shows that the filtering accuracy of UKF is indeed higher than that of EKF.In SINS/DVL/LBL integrated navigation system, the improved variable Bayesian filtering method is used to replace the classical Kalman filtering method, which improves the problem of filtering accuracy degradation caused by measurement noise and outlier interference. A federated Kalman filter algorithm is proposed to reduce the influence of measurement noise on navigation accuracy. The above filtering algorithms can better improve the performance of the navigation system. In the design of underwater beacon, an underwater positioning beacon device is designed. Its maximum positioning distance can reach 1200m, the positioning accuracy is better than 5‰, the maximum working depth is 300m, and the maximum working time is more than 24h. DBSCAN algorithm is applied to beacon positioning, and the overall route of underwater beacon array is designed. The SONAR/DVL/LBL integrated navigation system not only solves the shortcomings of inertial navigation system with time error accumulation, but also improves the scope of underwater acoustic navigation, but its navigation accuracy still has considerable errors. How to correct these errors through technical means is a problem that needs to be solved in the future SONAR/DVL/LBL integrated navigation [12].
Although sonar/ins navigation system can provide AUV Navigation and positioning information more accurately, the location and positioning of acoustic beacons is relatively cumbersome, especially for unknown sea areas, there are not enough conditions for the location of acoustic beacons and arrays. The global satellite navigation system (GNSS) is used for autonomous positioning of the marine buoy. The AUV finally determines its position by receiving and processing the acoustic signal of the marine buoy, combined with the inertial navigation system and sounding sensor, so as to better solve the above problems. The spatial signal accuracy of the US global positioning system (GPS) in GNSS is 0.52M; The spatial signal accuracy of the European Galileo system (Galileo) is 0.25m; Russia GLONASS system (GLONASS) can reach a maximum of 0.03m ground enhanced service; The positioning accuracy of China's Beidou satellite navigation system (BDS) is better than 10m, the speed measurement accuracy is better than 0.2m/s, the timing accuracy is better than 20ns, and the accuracy data in the Asia Pacific region is better. The above four satellite positioning systems can better meet the positioning needs of offshore buoys. The satellite positioning system is mainly composed of four positioning satellites, ground base stations and water surface positioning equipment that are not in the same plane. The current position information of the equipment is obtained through the mathematical model established by calculation. Researchers at home and abroad have done corresponding research on SONAR/INS/GNSS integrated navigation system. Youngberg proposed a SONAR/INS/GNSS integrated navigation scheme, which uses two buoys to receive GPS signals and obtain their positions on the earth coordinate, and uses GPS to communicate with each other to determine the distance difference between them, and then provides position information for multiple underwater targets through acoustic navigation system. Li Shigang made an experimental verification of the navigation and positioning provided by BDS and intelligent buoy for the underwater platform. The results showed that the maximum positioning accuracy in the buoy array was 4.5 m, and the minimum positioning accuracy at the edge was 7.7 M. In terms of the positioning accuracy of beacons, Zhang Dan and others have proved through calculation and simulation that there is a certain error in the positioning of beacons by GPS, but it is not more than two meters. Wang Bingzhou and others designed a small cableless underwater robot integrated navigation device using SINS/SONAR/GPS, which can realize long-distance navigation tasks. The above domestic and foreign research results prove that GNSS can better improve the accuracy of underwater positioning and navigation and enrich the underwater positioning and navigation methods. Using GNSS to provide AUV with auxiliary navigation is essentially the extension of ground navigation communication function to underwater. How to transmit underwater information to the ground command center through GNSS and form an all-round integrated navigation and communication system of land, sea and air needs to be completed by the underwater communication system. Underwater communication is mostly combined with GNSS to form a contact with the ground control personnel. It can not only transmit the location information and obtained data of the underwater vehicle to the ground/surface control personnel, but also transmit the instructions of the control personnel to the underwater vehicle, so as to achieve better positioning, navigation and path planning effects. Due to the serious attenuation of electromagnetic waves in water, the longest communication distance is only about 100 meters. Although the propagation distance of blue-green light waves is slightly longer, it is difficult to break through the order of kilometers. Underwater acoustic communication with a propagation distance of thousands of kilometers and a communication rate of 10~100bps has become the only choice for deep sea communication. The underwater communication network is roughly composed of underwater nodes, surface buoys, communication satellite nodes and shore base stations. At present, the United States has achieved laser communication at a depth of about 100m underwater. In 2001, an altexauv designed for high latitude and under ice operations completed the first Arctic polar experiment. Its communication system realized data communication with ground investigators through ice buoys and GPS. FréDéric Mosca and others designed a new sound source, using a modem with a center frequency of 500Hz and a bandwidth of 100Hz, and using the "passive time reversal process" to realize 100bit/s remote communication in the range of 1000km. Due to the complex and changeable underwater environment, the absorption and attenuation of sea water sound waves, the multipath effect of sea water, the large Doppler frequency shift, the time variability of underwater acoustic channels and the superposition of environmental noise, these technical difficulties that need to be overcome in underwater acoustic communication are the main directions of future research. At the same time, the underwater acoustic channel signal and GNSS signal are subject to malicious interference from the outside. How to make the underwater robot automatically recognize the interference signal and autonomously correct the route is also a problem that this kind of integrated navigation method must face and solve [13].
Inertial/dead reckoning navigation and SONAR/INS/GNSS integrated navigation have shortcomings such as error divergence with time and poor concealment. Geophysical navigation has the characteristics of high accuracy, good concealment and no external interference, which can make up for the shortcomings of the above navigation methods. Geophysical navigation system is mainly composed of inertial navigation unit, geophysical measurement unit and data matching algorithm unit. The inertial navigation unit is responsible for providing the limitation of initial position and working range. The geophysical measurement unit mainly provides the real-time measurement data of AUV, and the data matching algorithm unit mainly matches the measurement data with the geophysical database to obtain the real-time position information of AUV. The workflow of geophysical navigation system is shown in Figure 5.
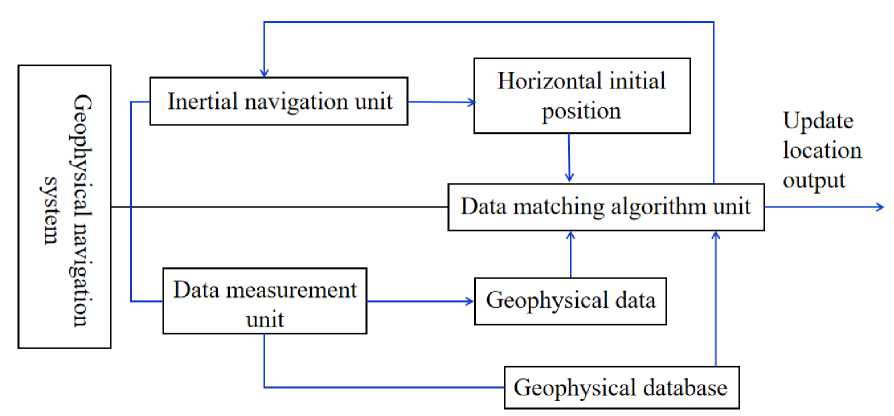
Figure 5. Work flow diagram of geophysical navigation system
Geophysical navigation can be roughly divided into terrain, gravity and geomagnetic matching navigation. The three principles are similar, among which researchers have done more research on terrain matching navigation system. Ingemar Nygren proposed an underwater robot positioning method in his doctoral thesis, which uses sonar and submarine topographic map to determine the absolute position of AUV. It is verified that when the likelihood function of the pseudo peak position converges to a Gaussian probability density function, the number of measured beams will tend to infinity. Meduna DK and others used terrain relative navigation (TRN) to conduct navigation experiments in the sea. Its navigation accuracy reached 5~10m, far exceeding the observation accuracy of dead reckoning navigation by 5~25%. TRN/AHRS integrated navigation can fully achieve or even exceed the accuracy of underwater acoustic navigation, It is also confirmed that high-performance TRN can use low-cost sensors to replace the original high-precision inertial navigation system and high-quality sonar (such as multi wave velocity echo sounder). Han Yue et al. Proposed an improved particle filter algorithm for terrain assisted positioning to reduce the loss of particle diversity and improve the positioning accuracy of the system. For the other two geophysical navigation methods, Liu Nian and others used TER-COM and UKF for gravity gradient assisted navigation to correct the cumulative error of INS, so as to improve the navigation accuracy. Ge Xiyun and others used geomagnetism to assist INS system in navigation. The simulation results show that the position accuracy within 500s is 4 times higher than that of pure INS system, and the error is less than 1m. The key of geophysical navigation is to obtain a priori geophysical database, and the collection of this data is very limited both at home and abroad, which is also an important reason for restricting geophysical navigation. How to obtain accurate and large geophysical databases and design efficient and fast algorithms to deal with matching data is the research and development direction of this method in the future [6-9].
In the future, non-traditional guidance methods applied to underwater robots will be developed, such as landform contour tracking guidance, seabed terrain matching guidance, gravity and magnetic guidance and other geophysical navigation technologies, which can effectively avoid the problems of traditional guidance models, such as the traditional guidance model based on global positioning technology, which is easy to expose its own position and prone to data blocking. In the future, China will integrate traditional and non-traditional methods to develop an intelligent navigation system with high security, high system integration and comprehensive correction function.
In recent years, the rapid development of artificial intelligence and big data technology has provided new ideas and directions for underwater positioning and navigation. Artificial intelligence algorithm, which takes simulating nature as the core idea, has been widely used in target recognition and positioning, path planning, improving positioning accuracy and so on. With the rapid development of artificial intelligence, its application in underwater positioning and navigation will be more extensive. How to combine artificial intelligence technology with underwater acoustic communication to independently modify the path when the mission target changes, and how to cooperate with long-range AUV to realize the target positioning of the last distance is the development direction of long-range, multi-target and high-precision positioning and navigation in the future [10-12].
Based on the research results of underwater robot positioning and navigation at home and abroad in recent years, this paper summarizes and analyzes several typical underwater positioning and navigation methods, and looks forward to the new development ideas and directions of underwater positioning and navigation technology combined with the development of new technologies such as underwater acoustic communication and artificial intelligence. In the future, the research hotspots of underwater positioning and navigation will be in the following aspects:
-
1) Improve the quality of data filtering and design a more robust filtering algorithm.
-
2) Design high-precision and low-cost measurement sensors to improve the performance of underwater robot positioning and navigation system.
-
3) The integration of GNSS and underwater acoustic communication makes the ground personnel know the underwater situation like the palm of their hand, enhances the observability of the position of the underwater robot, and improves the transmission distance and rate of underwater acoustic communication.
References Underwater robot technology and future trend analysis
- Cao, Shaohua, Zhang, Chunxiao, & Wang, Guangzhou (2019). Development status and military applications of intelligent underwater robots. Ship engineering, (2), 79-89.
- Xu, Yuru, & Li, Pengchao (2011). Development trend of underwater robots. Journal of nature, (3), 125-133.
- Li, Yiping, Li, Shuo, & Zhang, Aiqun (2016). Research status of autonomous/ remote controlled underwater robots. Engineering Research-Engineering from an interdisciplinary perspective, (2), 217-222.
- Zhang, Hongxin, Ma, long, & Zhang, Liting (2015). Application progress of underwater robots in the field of ocean observation. Telemetry and remote control, (5), 23-27.
- Zhu, Baoxing, Yu, Fusheng, Liang, Wei (2020). Analysis on the structural form and development trend of underwater robot. Ship engineering, (2), 1-7.
- Zhao, Junbo, GE, Xiyun, & Cheng, Yue (2021). SINS/DVL/LBL integrated navigation technology based on improved variable Bayesian filtering. Journal of Underwater Unmanned Systems, 29 (01), 54-59.
- Zhu, Bing, Chang, Guobin, & He, Hongyang (2020). Robust information fusion method in combined sins /dvl/ ast underwater navigation. Journal of the National University of defense technology, 42 (05), 107-114.
- Ye, Lianfeng, & Zhou, Difeng (2018). Design of an underwater positioning beacon device. Electromechanical engineering technology, 47 (06), 77-79.
- Wang, Li (2020). AUV based underwater beacon positioning algorithm and error analysis. Harbin: Harbin Institute of technology.
- Lu, Gu, Zhang, Gong, & Su, Chengeng (2021). Analysis of the latest progress and trend characteristics of the world's satellite navigation system. Satellite applications, (02), 32-40.
- Yan, Zheping, & Wang, Lu (2017). Research status and progress of UUV underwater positioning methods. Journal of Harbin Engineering University, 38 (07), 989-1000.
- James, W. & Youngbe, G. (1991). A Novel Method for Extending GPS to Underwater Applications. John Wiley & Sons, Ltd, 38(3), 263-271.
- Li, Shigang, & Chang, Peng (2020). Research on underwater Beidou precision navigation and positioning system technology. Command control and simulation, 42(01), 124-128.
