Управление движением антропоморфного робота по принципу естественных синергий у человека

Автор: Александров А.В., Фролов А.А., Мергнер Т., Хеттик Г., Фролов А.М.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 1 (79) т.22, 2018 года.
Бесплатный доступ
Введенный изначально в области исследования живых систем принцип двигательного управления, основанный на независимом контроле движений вдоль собственных векторов динамического уравнения (естественных синергий) во время вертикального стояния у человека, предлагается использовать для управления движениями вертикально стоящего антропоморфного робота PostuRob II с пневматическими приводами, действующими в тазобедренном и голеностопном суставах. Предлагаемый принцип двигательного управления осуществляется с помощью двух независимых пропорционально-дифференциальных контроллеров с временными задержками в петлях обратной связи для каждой из двух естественных синергий. Представлены результаты экспериментов с движениями робота, которые осуществлялись под управлением пропорционально-дифференциальных контроллеров с теоретически найденными параметрами обратной связи, обеспечивавшими устойчивость управления. В работе продемонстрировано, что организация двигательного управления антропоморфным роботом на основе независимого контроля естественных синергий может обеспечить устойчивое управление движениями антропоморфного робота, несмотря на наличие задержек в петлях управления по обратной связи порядка сотен миллисекунд и такие неучтенные при моделировании управляющего контроллера факторы, как различного рода нелинейности, шумы, неточности показаний сенсоров, трение, люфты и т.д. Приводятся результаты исследования переходных характеристик управления, которые наблюдались в экспериментах с роботом PostuRob II.
Биомеханическая модель тела человека, антропоморфный робот, двигательное управление по обратной связи, пропорционально-дифференциальный контроллер
Короткий адрес: https://sciup.org/146282084
IDR: 146282084 | УДК: 531/534: | DOI: 10.15593/RZhBiomeh/2018.1.05
Movement control in anthropomorphic robot using a human inspired eigen movement concept
Biologically inspired principle of the movement control based on the independent control of movements along the eigenvectors of the dynamic equation (eigenmovements) during vertical standing in human is applied to the movement control of the vertically standing anthropomorphic robot with pneumatic actuators acting around “hip” and “ankle” joints. The proposed control is performed by two independent proportional and derivative controllers for two eigenmovements using feedback loops with time delays. Experiments with robot movements in which the theoretically obtained feedback loop parameters for the stable proportional and derivative control are presented. The study demonstrates that stable control in the anthropomorphic robot can be realized on the basis of the eigenmovement concept despite of the delays of the order of hundreds milliseconds in the feedback loop and the presence of such unaccounted factors as nonlinearities of different kinds, noise, friction, inaccuracy of sensors, backlashes, etc. The different experimentally obtained transient characteristics of the robot movement control are compared with the theoretically expected ones.
Текст научной статьи Управление движением антропоморфного робота по принципу естественных синергий у человека
Движения человека или антропоморфного робота в поле силы тяжести требуют поддержания равновесия во время движения. Известно, что человек достаточно просто сохраняет равновесие, выполняя движения различными частями тела, в то время как современные технологии в конструировании двуногих роботов еще далеки от того, чтобы демонстрировать такую же простоту и гибкость [11, 19]. Поэтому представляет интерес возможность переноса принципов управления движениями человека на антропоморфные роботы, в частности, использовать в робототехнике принцип независимого управления «собственными движениями» или «естественными синергиями», предложенный в работах [1–8] при исследовании движений тела человека. Под собственными движениями (естественными синергиями) многосуставной биомеханической системы понимаются движения вдоль собственных векторов ее динамического уравнения. Движения вдоль собственных векторов характеризуются пропорциональным изменением суставных углов и одновременно суставных моментов, т.е. «линейными» кинематической и динамической синергиями. В любом многосуставном движении, отличающимся от движений вдоль собственных векторов, пропорциональное изменение суставных углов не может быть результатом пропорционального изменения суставных моментов. Такое уникальное свойство движений вдоль собственных векторов и позволило назвать их условно «естественными синергиями». Уравнение движения для каждой из естественных синергий имеет такой же вид, как для однозвенного перевернутого маятника. Это дает возможность представить произвольное движение многозвенной биомеханической системы в поле силы тяжести в виде суперпозиции естественных синергий, т.е. независимых движений нескольких однозвенных перевернутых маятников. В работах [1–8] были представлены аргументы в пользу того, что переход к описанию движения тела человека в поле силы тяжести в виде суперпозиции естественных синергий (независимых «однозвенных маятников») есть не только формальный способ упростить анализ многозвенного движения, но что естественные синергии являются в этом случае для центральной нервной системы целостными единицами двигательного управления.
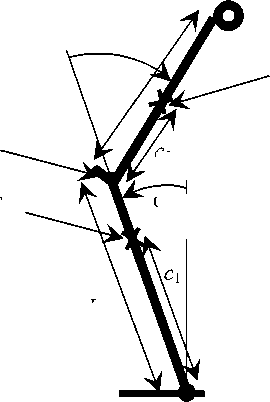
В настоящей работе возможность переноса принципа независимого управления естественными синергиями на антропоморфные роботы исследуется на примере двухсуставного робота PostuRob II [15], движения которого состоят в изменении углов в нижнем («голеностопном») и верхнем («тазобедренном») суставах в сагиттальной плоскости (рис. 1). Одним из важных свойств управления роботом PostuRob II является наличие задержки в петле обратной связи порядка 100 мс. Эта задержка является результатом использования пневматических приводов в его конструкции.
Известно [21, 22], что управление движениями по обратной связи у человека организовано по типу пропорционально-дифференциального контроллера с временной задержкой также порядка 100 мс. При этом параметры пропорциональнодифференциального контроллера согласованы с такими задержками, так что они обеспечивают устойчивость движения человека. Этот результат побуждает организовать устойчивое управление механических систем с характерными для человека временными задержками, применяя простейший пропорциональнодифференциальный контроль и избегая, таким образом, усложнения, например, путем введения некоторой компенсации временной задержки с использованием системы прогнозирования [14]. Чтобы реализовать такую схему, мы экспериментально протестировали вышеупомянутый метод, основанный на концепции «собственных движений» («естественных синергий»), в котором вначале рассчитали оптимальные параметры пропорционально-дифференциального контроллера для антропоморфного робота PostuRob II, обеспечивающие наиболее устойчивое управление при заданной задержке и заданных длинах и массах звеньев его конструкции.
В качестве критерия оптимизации параметров пропорциональнодифференциального контроллера был использован минимум показателя Ляпунова для каждого из двух собственных движений (естественных синергий). Напомним, что для устойчивого управления показатель Ляпунова должен быть отрицательным, а его абсолютная величина определяет характерное время затухания отклика динамической системы на возмущение. В предыдущей публикации [9] было продемонстрировано, что организация двигательного контроля на основе независимого управления естественными синергиями обеспечила устойчивое циклическое движение робота PostuRob II в диапазоне частот 0,05…1,2 Гц, несмотря на такие неучтенные при программировании контроллера факторы, присущие любой механической системе, как различного рода нелинейности, шумы, трение, люфты и т.д. В настоящей работе приводятся результаты более детального исследования переходных характеристик двигательного управления, которые наблюдались в экспериментах с движениями робота.
Исследование состояло из следующих трех этапов. На первом этапе были проведены дополнительные эксперименты по исследованию циклических движений робота в диапазоне частот от 0,05 до 1,0 Гц с различными соотношениями амплитуд в нижнем и верхнем суставах. Напомним, что в работе [9] приведены результаты для движений робота лишь при единственном соотношении амплитуд колебаний в нижнем и верхнем суставах. Использованное соотношение амплитуд обеспечивало стабилизацию общего центра тяжести робота PostuRob II. При единственном соотношении амплитуд невозможно найти переходные характеристики двигательного управления для двухсуставного робота (см. раздел Методы). На втором этапе по полученным экспериментальным данным оценивались инерционные и геометрические параметры робота, а также временные задержки преобразования заданных контроллером силовых моментов в реальные. Затем по этим оценкам рассчитывались оптимальные параметры пропорционально-дифференциального контроллера. С помощью компьютерной модели показано, что независимое управление по естественным синергиям значительно более устойчиво по сравнению с независимым управлением по отдельным суставам. На третьем этапе проводилось сравнение теоретических и экспериментально наблюдаемых переходных функций, связывающих желаемую и реальную кинематику движений. При этом эксперименты и теоретические расчеты проводились при оптимальных параметрах пропорциональнодифференциального контроллера, рассчитанных на втором этапе. Обсуждаются результаты и рассматриваются перспективы использования принципов независимого двигательного управления естественными синергиями к управлению антропоморфными роботами.
Методы
Робот PostuRob II
Общий вес робота составлял 51 кг. Он состоял из корпуса, двух ног и ступней, соединенных «тазобедренным» и «голеностопным» суставами (рис. 1). Его антропометрические параметры, такие как соотношения масс нижнего («ноги») и верхнего («корпус» с «головой») звеньев , моментов инерции Ji , длин Li и расположений центров масс ci сегментов тела(i = 1, 2, рис. 1), были подобраны близкими к человеческим [25]. Геометрические и инерционные характеристики робота, рассчитанные по его двухзвенной биомеханической модели, приведены в [9].
Сигналы от датчиков суставных углов поступали в персональный компьютер на вход программируемого контроллера в режиме реального времени. Модель независимого управления собственными синергиями реализовывалась пропорционально-дифференциальным контроллером в виде откомпилированной Simulink модели ( Real-Time Windows Target , The Math Works Inc. , Natick , USA ). Сигналы с выхода контроллера управляли силовыми моментами в верхнем и нижнем суставах (рис. 1) с помощью приводов, реализованных в виде искусственных пневматических «мышц» ( FESTO AG & Co.KG , Esslingen , Germany ; Typ MAS 20). Регистрировались сигналы от соответствующих датчиков о текущих углах и силовых моментах в суставах. Данные оцифровывались с частотой 200 Гц.
«Тазобедренный» сустав
ЦТ 1
c 2
ЦТ 2
m 1, J 1 – масса и момент инерции «ног»
«Голеностопный» сустав m2, J2 – масса и момент инерции «корпуса»
L 1
φ 1
Рис. 1. Геометрические и инерционные параметры двухзвенной биомеханической модели робота Posturub II: ЦТ1 и ЦТ2 – положения центров тяжести нижнего и верхнего сегментов модели Добавить на рисунке угол φ 2
Уравнение движения двухзвенной механической модели робота (рис. 1) в сагиттальной плоскости вблизи вертикального положения, линеаризованное в окрестности ф 1 = ф 2 = 0, имеет вид [5, 8, 10, 26] ii
C ф - D ф = T , (1)
где φ – вектор углов в нижнем и верхнем суставах; С и D – инерционная и гравитационная матрицы с постоянными коэффициентами, T – вектор суставных моментов управляющих сил. Как и при управлении движениями человека [7, 8, 9], управляющие силы задаются пропорционально-дифференциальным контроллером с задержкой т :
T(t) = -Dф(t-т)+ S(фd (t-т)-ф(t-т))- Vф(t-т), (2)
где φ d ( t ) задает временной ход изменения суставных углов в желаемом ( desired ) движении, а S и V – матрицы жесткости и вязкости, элементами которых являются коэффициенты усиления в петле обратной связи.
Экспериментальная парадигма
В настоящем исследовании робот стоял свободно на твердой горизонтальной опоре. Он совершал активные синусоидальные колебательные движения под действием управляющих сигналов, поступающих с пропорционально-дифференциального контроллера на приводы в виде желаемых ( desired) суставных углов ф id = At sin(2n ft ) частоты f и амплитуды Ai в нижнем ( i = 1) и верхнем ( i = 2) cуставах в cагиттальной плоскости ( – текущее время). Частоты принимали значения f = 0,05, 0,1, 0,2, 0,4, 0,6, 0,8 и 1,0 Гц. Пять пар амплитуд желаемых суставных углов ( A 1, A 2) = (0, 10°), (–2,5°, 7,5°), (–5°, 5°), (–4,5°, 1,5°) и (3°, 0) использовались для каждой частоты .
На первом этапе исследования параметры пропорциональнодифференциального контроллера задавались оптимальными по критерию минимизации показателя Ляпунова в предположении, что геометрические и инерционные характеристики робота (параметры Li , ci , mi , Ji двухзвенной биомеханической модели на рис. 1) соответствуют модельным значениям, приведенным в [9], а задержка преобразования требуемых силовых моментов в реальные составляет 100 мс. Как показано в [9], заданные таким образом параметры пропорциональнодифференциального контроллера обеспечивают устойчивое управление роботом.
Расчет переходной функции для преобразования двумерного сигнала X в двумерный сигнал Y
Три экспериментальные переходные функции – для преобразования суставныx углов в моменты сил в суставах F e φ T , для преобразования желаемых силовых моментов на выходе контроллера в реальные моменты сил в суставах F e TT и для преобразования желаемых суставных углов в реальные углы F e φφ – рассчитывались по одной и той же приведенной ниже формуле (4) для переходной функции F XY , в которую в качестве переменных X и Y подставлялись экспериментально измеренные углы или силовые моменты в зависимости от того, какое преобразование требовалось найти.
Пусть требуется найти преобразование двумерного сигнала X в двумерный сигнал Y . Как описано в предыдущем разделе, циклические движения робота для каждой частоты совершались с пятью различными соотношениями амплитуд желаемых суставных углов ( A 1, A 2). Для каждого соотношения сигналы X и Y могут быть представлены в виде X = X 0 exp( i to t ) и Y = Y 0 exp ( i to t ) , где X 0 и Y 0 - двумерные комплексные векторы, задающие амплитудные и фазовые сдвиги для каждой из двух компонент векторов X и Y , круговая частота ω=2π f , i есть мнимая единица. Комплексные векторы X 0 и Y 0 рассчитывались как
X 0 = < X exp ( - i to t ) > , Y 0 =< Y exp ( - i to t ) > ,
где скобки <0 > означают усреднение по времени. Тогда переходная функция вычисляется как
F XY = M Y M X, где MX и MY есть матрицы, в которых векторы X 0 и Y0 , полученные для каждой пары амплитуд желаемых суставных углов (A1, A2), являются столбцами. При этом псевдообратная матрица MX = MT (MXMT )-1.
Из-за разницы отношений амплитуд A 1/ A 2 желаемых суставных углов в пяти экспериментальных записях для данной частоты, отношения двух компонентов во всех векторах X 0 также различны. Таким образом, две строки матрицы M X линейно независимы, и 2 2 матрица M X M T X несингулярна. В принципе, для получения несингулярной матрицы M X M T X и, следовательно, матрицы F XY достаточно только двух экспериментов с разными отношениями амплитуд сигнала X ( t ) [12]. Однако из-за высокого уровня шума в реальной механической конструкции PostuRob II мы использовали пять таких экспериментов.
Каждый комплексный коэффициент Fij XY определяет влияние j -й компоненты сигнала X ( t ) на i -ю компоненту сигнала Y ( t ) . Его можно представить в виде:
F iX = Amp ( F iXY ) exp ( i Phase ( F iXY ) ) , (5)
где Amp ( FX ) и Phase( Fij XY ) есть амплитудная и фазовая переходные функции.
Оценка инерционной и гравитационной матриц робота
В целом были испытаны три различных метода оценки инерционной и гравитационной матриц PostuRob II C и D в уравнении (1). Метод 1 заключается в их расчете с использованием параметров длины и массы двухзвенной биомеханической модели, показанной на рис. 1 и описанных в [9]. Метод 2, также описанный в [9], заключается в вычислениях, основанных на линейном регрессионном анализе согласно уравнению (1). Метод 3 заключается в расчетах, основанных на интегрировании уравнения (1) с экспериментально полученными силовыми моментами T и некоторым заданным набором элементов для матриц C и D . В качестве оценок характеристик робота были взяты матрицы C и D , которые минимизируют погрешность между значениями экспериментальных суставных углов и суставных углов, полученных путем численного интегрирования. Поиск элементов этих матриц выполнялся методом fminsearch , заданным в программном обеспечении MATLAB . В качестве начального приближения использовались матрицы C и D , рассчитанные по методу 1. Градиентный спуск прекращался на шаге, когда погрешность между значениями расчетных и экспериментальных суставных углов уменьшалась меньше чем на 10–4 по сравнению с предыдущим шагом. Отметим, что в расчетах по методам 2 и 3 были использованы ограничения на матрицы C и D , а именно - C 12 = C 21 , D 12 = D 21 = D 22 [9].
Матрицы C и D , полученные тремя описанными методами, использовались для расчета теоретической переходной функции F t φ T по формуле
F t ф T = - to 2 C - D , (6)
которая следует из уравнения (1). Полученная теоретическая переходная функция сравнивалась с экспериментальной F e φ T , полученной по уравнению (4). При этом в качестве переменной X использовались экспериментальные значения суставных углов φ , а в качестве переменной Y – экспериментальные значения суставных моментов сил T .
Оценка временных задержек преобразования силовых моментов, заданных на выходе контроллера, в силовые моменты, действующие на робота
Преобразование требуемых силовых моментов на выходе контроллера в силовые моменты, действующие на робота, осуществляются независимо для каждого сустава. Таким образом, теоретическая переходная функция F t TT имеет вид
F tTT
- itoAt e 1
- i to A t)
e t2
Теоретическая переходная функция FtTT сравнивалась с экспериментальной FeTT , полученной по уравнению (4). При этом в качестве переменной X использовались требуемые значения суставных моментов сил с выхода пропорциональнодифференциального контроллера, а в качестве переменной Y – экспериментальные значения суставных моментов сил T, действующих на робота. Задержки At1 и At2, которые обеспечивают наилучшее совпадение теоретической и экспериментальной функций, брались в качестве оценки временных задержек указанного преобразования у робота. К полученным задержкам At1 и A12, программно добавлялись задержки AtC и At2 контроллера, чтобы уравнять полные задержки в петлях обратной связи для каждого из двух суставов до значения т = At1 + AtC = At2 + AtC = 100 мс . (8)
Переходная функция Fφφ для преобразования желаемых изменений суставных углов в реальные
Движения робота управлялись на основе независимого контроля естественных синергий [1-8]. Под естественными синергиями понимаются движения вдоль собственных векторов уравнения (1). По определению, собственные векторы w i уравнения (1) находятся из условия
Cw i = X i Dw i , ( i = 1,2) (9)
где X i - собственные значения. Индекс i = 1,2 нумерует собственные значения по их убыванию.
Линейное приближение позволяет представить любое двухсуставное движение в виде суммы двух движений вдоль каждого из собственных векторов. Такое представление предполагает преобразование вектора суставных углов ф (t) в вектор кинематических амплитуд § (t) путем обращения уравнения ф (t ) = W§ (t), (10)
где столбцы матрицы W есть собственные векторы w i , а каждая из компонент вектора § ( t ) определяет временной ход движения вдоль соответствующего собственного вектора. Движение вдоль собственного вектора назовем условно «собственным движением», или «естественной синергией».
Тогда в терминах собственных движений § ( t ) динамическое уравнение (1) принимает вид
Л§ - § = п, (11)
где п = ( DW ) - 1 T , а Л есть диагональная матрица с коэффициентами X i .
Уравнение (2) в терминах собственных движений (естественных синергий) принимает вид
П ( t ) = - § ( t - т ) + 5 'g ( § d ( t - т ) - § ( t - т ) ) - V- § ( t - т ) , (12)
где
S eg = ( DW ) - 1 SW , V eig = ( DW ) - 1 VW , (13)
S eig и V eig – матрицы жесткости и вязкости в терминах естественных синергий.
Независимое управление по каждой из введенных естественных синергий предполагает, что векторное уравнение (1) с управляющими моментами сил, задаваемыми уравнением (2), распадается на два независимых уравнения в терминах ξ и η . Это возможно только в случае, если матрицы S eig и V eig в уравнении (12) диагональны. Тогда векторное уравнение (1) распадается на два скалярных уравнения, каждое из которых описывает движение однозвенного перевернутого маятника, управляемого своим пропорционально-дифференциальным контроллером:
Ш t H( t ) = n ( t ) , ( i = 1,2) (14)
где
П , ( t ) = - ; , ( t - t ) + S'* ( ^ d ( t - г ) -! ; , ( t - т ) ) - V« ;, ( t - t ) . (15)
В уравнении (15) Seigi и Veigi – коэффициенты диагональных матриц S eig и V eig .
Независимость пропорционально-дифференциального контроля каждой из естественных синергий позволяет проанализировать устойчивость движения всего тела путем отдельного анализа устойчивости движения для каждой из этих синергий, т.е. исследовать устойчивость движений отдельных однозвенных перевернутых маятников, описываемых уравнениями (14) и (15). Способ расчета оптимальных значений параметров Sieig и Vieig при данных матрицах С и D задержках τ приведен в работе [9]. Оптимальные матрицы S и V в терминах суставных углов рассчитываются обращением уравнений (13). Данные матрицы были использованы в пропорциональнодифференциальном контроллере робота PostuRob II для проведения экспериментов на третьем этапе настоящей работы.
Преобразование Фурье динамического уравнения (1) с учетом выражения для управляющих силовых моментов (2) имеет вид:
МФ = FjT SФ d , (16)
где Φ d и Φ – двумерные векторы Фурье-преобразования для желаемых и экспериментально наблюдаемых суставных углов ф d ( t ) и ф ( t ) ,
M = F^ T + F tTT ( D + S + , ю V ) , (17)
параметры пропорционально-дифференциального контроллера S и V являются оптимальными по показателю Ляпунова, как описано в [9], теоретическая переходная функция F t φ T задается уравнением (6), в котором используются оптимальные оценки матриц С и D , как описано в разделе 2.4, а теоретическая переходная функция F t TT задается уравнением (7), в котором используется временная задержка вместо A t 1 и A 1 2 (см. уравнение (8)). По уравнению (16) теоретическая переходная функция для преобразования желаемых изменений суставных углов в реальные имеет вид
F t фф = M - 1 Г и S . (18)
Экспериментальная переходная функция F e φφ рассчитывалась согласно уравнению (4), в котором в качестве переменной X использовались желаемые значения суставных углов φ d на входе пропорционально-дифференциального контроллера, а в качестве переменной Y – экспериментальные значения суставных углов φ .
Результаты
Оценка аппаратных характеристик робота PostuRob II
В таблице представлены значения элементов матриц инерции C и гравитации D робота PostuRob II, полученные в соответствии с тремя методами оценки этих матриц, описанными в разделе «Оценка инерционной и гравитационной матриц робота». Таблица показывает, что три метода дали близкие результаты.
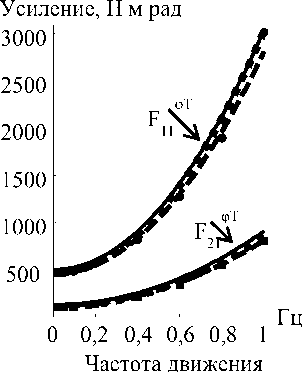
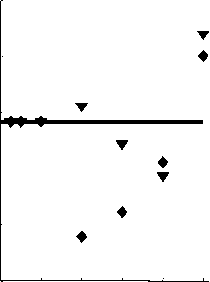
Кривые на рис. 2 представляют теоретические передаточные функции F t φ T , которые вычислялись согласно уравнению (6) с использованием инерционных и гравитационных матриц С и D , полученных для каждого из трех описанных методов и показанных в таблице. Заметим, что фаза для всех элементов теоретической передаточной функции F t φ T равна π рад (сплошные линии на рис. 2, б ).
Экспериментальные точки на рис. 2, изображенные маркерами четырех различных типов, представляют четыре матричных элемента экспериментально полученной переходной функции F e φ T для преобразования суставных углов φ в суставные моменты сил T в форме амплитудной (рис. 2, а ) и фазовой (рис. 2, б ) переходных функций согласно уравнению (5). Экспериментальная переходная функция F e φ T вычислялась в соответствии с уравнением (4) для случая, когда две составляющие сигнала X ( t ) являются суставными углами, а две составляющие сигнала Y ( t ) – соответствующие суставные силовые моменты, зарегистрированные во время вышеописанных циклических движений робота.
Среднеквадратичная ошибка рассогласования между F e φ T и переходными функциями F t φ T составила 12,0, 11,2 и 9,9% для оценки методами 1, 2 и 3 соответственно. Поскольку метод 3 (решение прямой динамической задачи) оказался наиболее точным, инерционная и гравитационная матрицы, рассчитанные этим методом, были использованы в дальнейшем для расчета оптимальных параметров пропорционально-дифференциального контроллера.
Теоретическая переходная функция F t TT для преобразования желаемых моментов сил в суставах, задаваемых на выходе пропорционально-дифференциального
Элементы матриц инерции и гравитации и динамического уравнения (1) для робота PostuRob II, полученные тремя методами, описанными в разделе «Оценка инерционной и гравитационной матриц робота»
|
Метод оценки |
C 11 , Н м с2 рад–1 |
с 12, Н м с2 рад–1 |
с 22 , Н м с2 рад–1 |
D 11 , Н м рад–1 |
D 22 , Н м рад–1 |
|
Метод 1 (модель) |
64,36 |
19,82 |
8,68 |
498,25 |
127,04 |
|
Метод 2 (регрессия) |
59,70 |
17,72 |
9,25 |
452,53 |
112,71 |
|
Метод 3 (интегрирование) |
65,01 |
19,09 |
7,20 |
460,01 |
103,02 |
–1
Усиление, Н м рад
а
Метод 1 – сплошные линии
Метод 2 – штриховые линии
Метод 3 – пунктирные линии
0,2 0,4 0,6 0,8 1
Частота движения
F22 q τ
Гц
3,25
3,2
3,15
3,1
3,25
Фаза, рад
3,05
3 Гц
0 0,2 0,4 0,6 0,8 1
Частота движения
Фаза, рад
3,2
3,15
3,1
3,05
б
0 0,2 0,4 0,6 0,8 1
Частота движения
Гц
Рис. 2. Амплитудная (а) и фазовая (б) характеристики теоретической FtφT (линии) и экспериментальной FeφT (маркеры) переходных функций для преобразования суставных углов ь ф в суставные силовые моменты T. Экспериментальные точки (маркеры) соответствуют следующим матричным элементам: ○ затемнить – Feφ11T , □ затемнить – Feφ2T1 ,
▼ – Fe φ 12 T , ◊ затемнить – Fe φ 2 T 2
контролера, в реально наблюдаемые суставные моменты сил вычислялась по уравнению (7). Экспериментальная переходная функция F e TT для этого преобразования вычислялась по уравнению (4), в котором двумя компонентами сигнала X ( t ) являются соответственно желаемые моменты сил в голеностопном и тазобедренном суставах, а двумя компонентами сигнала Y ( t ) – их реально измеряемые значения. Задержки ∆ t 1 и ∆ t 2 в уравнении (8), обеспечивающие минимальную среднеквадратичную ошибку между F e TT и F t TT , составили ∆ t 1 = 91 мс (тазобедренный сустав) и ∆ t 2 = 53 мс (голеностопный сустав). Минимальная среднеквадратичная ошибка составила 5,1%.
К полученным таким образом аппаратным задержкам ∆ t 1 и ∆ t 2 робота PostuRob II были принудительно добавлены программные задержки контроллера
A t C = 9 мс и A 1 C = 47 мс с тем, чтобы выполнялось уравнение (8).
Переходная функция преобразования желаемых изменений суставных углов в реально наблюдаемые
Экспериментально полученные по методу 3 (см. таблицу) матрицы инерции и гравитации С и D использовались для расчета собственных значений и собственных векторов по уравнению (9) и затем для расчета оптимальных параметров по критерию
пропорционально-дифференциального контроллера и минимизации показателя Ляпунова [9]. Они составили
X 1 = 0,15 с2; w 1
X2 = 0,02 с2; w 2 =
^- 0,89 Л к- 0,46 , Г- 0,29 Г
; S e ig = 1,04; V 1 eig = 0,73 с;
к
0,96 )
; S eig = 0,06; V^ i = 0,15 с.
Для приведенных оптимальных параметров S eig и V eig показатели Ляпунова, рассчитанные согласно процедуре [9], составляют –5,6 с–1 для первой естественной синергии и –4,1 с–1 – для второй. Оптимальные параметры диагональных матриц S eig и V eig в терминах естественных синергий использовались для расчета матриц S и V в терминах суставных углов с помощью обращения уравнения (13). Для робота PosturRob II они составили
5 =
Г 462,6 138,7 ' к 138,7 46,8 v
Н м рад - 1;
Г 325,8
к 93,8
93,8
39,3 )
Н м рад 1 с.
Данные значения находятся в пределах известных из литературы значений для человека (см. обзор в [7]).
Рассчитанные параметры пропорционально-дифференциального контроллера были далее использованы в экспериментах с роботом PosturRob II с целью определения его реально наблюдаемой переходной функции Feφφ преобразования желаемых суставных углов φd в реальные экспериментально наблюдаемые суставные углы φ, а также для сравнения ее с теоретически рассчитанной функцией Ftφφ по уравнению (18).
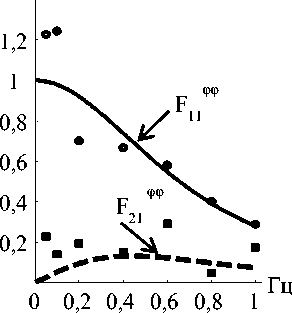
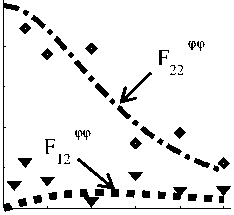
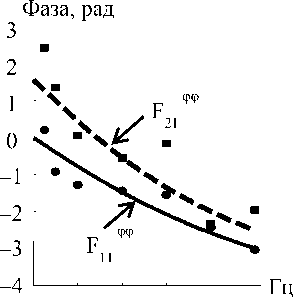
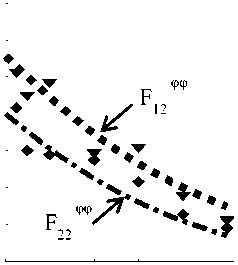
На рис. 3 показаны коэффициенты усиления (рис. 3, а) и фазовая (рис. 3, б) характеристика переходной функции F φφ преобразования желаемых суставных углов φ d в реально наблюдаемые углы φ . Теоретические кривые для амплитудных и фазовых характеристик функции Ftφφ , вычисленной по уравнению (18), сравниваются с экспериментально полученными характеристиками функции Feφφ , рассчитанными согласно уравнениям (4) и (5) для случая, когда составляющие сигнала X (t) являются желаемыми углами в нижнем («голеностопном») и верхнем («тазобедренном») суставах, а две составляющие сигнала Y (t) – соответствующими экспериментально наблюдаемым углам. Недиагональные (перекрестные) элементы F2φ1φ и F1φ2φ как теоретической, так и экспериментальной переходной функции F φφ отличны от нуля. Однако их амплитудные характеристики (рис. 3, а) малы по сравнению с этими характеристиками для диагональных элементов F1φ1φ и F2φ2φ . Отметим, что фазовые характеристики теоретических перекрестных элементов Ftφ21φ и Ft1φ2φ на рис. 3, б (пунктирные линии) равны, как это следует из уравнений (17) и (18).
Усиление, безразмерн.
Усиление, безразмерн.
1,2
Частота движения
0,8
0,6
0,4
0,2
0 0,2 0,4 0,6 0,8 1
Частота движения
Гц
а
0 0,2 0,4 0,6 0,8 1
Частота движения
Фаза, рад 3
–1
–2
–3
0 0,2 0,4 0,6 0,8
Частота движения
–4
Гц 1
б
Рис. 3. Амплитудная ( а ) и фазовая ( б ) характеристики для теоретической F t φφ (линии) и экспериментально наблюдаемой F e φφ (маркеры) переходной функции преобразования желаемых суставных углов φ d в реальные суставные углы φ : Экспериментальные точки (маркеры) соответствуют следующим матричным элементам: ○затемнить – Fe φ 11 φ , □ затемнить – Fe φ 2 φ 1 ,▼ – Fe φ 12 φ , ◊ – Fe φ 2 φ 2
В целом, экспериментальные данные (маркеры на рис. 3, а , б ) качественно соответствуют теоретическим (линии), несмотря на некоторый количественный разброс данных. Различия незначительно увеличиваются с увеличением частоты и более выражены для недиагональных элементов матрицы преобразования, чем для диагональных. Однако различия не носят систематического характера и, скорее, отражают наличие шума и различных нелинейностей, чем фундаментальное отличие конструкции робота от модели, заданной уравнениями (1) и (2).
Обсуждение результатов
В настоящей работе описан и проверен на антропоморфном роботе принцип двигательного контроля, основанный на независимом управлении «естественными синергиями», т.е. движениями вдоль собственных векторов динамического уравнения. Известно, что этот принцип используется центральной нервной системой при управлении движениями в сагиттальной плоскости у вертикально стоящего человека [1–8]. Представлялось интересным, насколько данный принцип применим также и для управления антропоморфным роботом, т.е. реальной механической конструкцией с ее шумами, погрешностями сенсоров, люфтами, трением и т.д., которые не учитывались при расчете параметров петли обратной связи, используемой для управления роботом. При их расчете учитывались лишь инерционные и гравитационные характеристики его конструкции, входящие как параметры в динамическое уравнение, а также задержка преобразования желаемых моментов сил в суставах в реально действующие. Основным результатом настоящего исследования является экспериментальная демонстрация того, что принцип независимого управления естественными синергиями, для реализации которого необходимо учитывать только эти характеристики конструкции робота, обеспечивает его устойчивое управление с характеристиками, близкими к теоретически ожидаемым.
Управление позой и движениями по обратной связи у человека при стоянии обеспечивается пропорционально-дифференциальным контроллером [7, 8, 21, 22] за счет интеграции проприоцептивной, зрительной, вестибулярной и тактильной информации [16]. Каждая из сенсорных систем имеет свои частотные характеристики и временные задержки. Внешние возмущения в первую очередь вызывают ответ с нулевой задержкой, обусловленный пассивными механическими свойствами мышц, связок и сухожилий. Затем включаются спинальные и стволовые рефлексы с задержкой около 40–80 мс [13]. За ними следуют высоколатентные ответы с задержками до 200 мс [18, 21]. Для того, чтобы обеспечить стабильность управления при наличии таких больших задержек, необходимо ограничить значения коэффициентов усиления петли обратной связи как сверху, так и снизу. Ограничения сверху приводят к тому, что коэффициенты усиления должны быть на порядки меньше, чем используемые в промышленных роботах. Именно это свойство делает движения человека плавными и гибкими в ответ на внешние возмущения. Однако при уменьшении коэффициентов усиления уменьшаются собственные частоты колебаний биомеханической системы, которые могут стать близкими к частотам естественных движений человека. Это может привести к резонансным колебаниям с большой амплитудой, нарушая плавность и монотонность выполнения движения даже при сохранении их устойчивости [17]. При управлении движениями у человека проблема резонансных колебаний снимается с помощью управления по « полному состоянию » (« full-state feedback control » [10, 20]), при котором движение в каждом суставе контролируется по обратной связи с учетом движений во всех суставах. В робототехнике наиболее эффективным методом расчета параметров петли обратной связи при управлении по полному состоянию является метод LQR ( Linear Quadratic Regulation ) [23], который, однако, неприменим при наличии временных задержек. Как показано нами ранее [7, 8], проблема поиска оптимальных параметров петли обратной связи у человека решается с помощью независимого управления естественными синергиями. Настоящее исследование показывает, что этот принцип управления может применяться и в случае контроля движения в робототехнике.
Мы использовали задержку At1 = A12 = 100 мс в обеих петлях обратной связи для независимого управления обоими собственными движениями робота. Это значение задержки в основном определялось задержками в пневматических мышцах робота, которые сопоставимы с задержками, наблюдаемыми у людей [7, 8, 21, 22]. Как мы показываем в настоящей работе, стабильное управление с такими задержками и механическими характеристиками робота PostuRob II оказывается возможным. Был произведен расчет оптимальных параметров пропорционально-дифференциального контроллера (коэффициентов «жесткости» и «вязкости»), обеспечивающих минимальное значение показателя Ляпунова, а значит наиболее быстрый ответ на внешнее возмущение в каждой из двух естественных синергий робота. Диапазоны жесткости и вязкости в суставах, при которых управление остается устойчивым, хорошо согласуются со значениями, полученными в исследованиях на человеке (см. обзор в [7]).
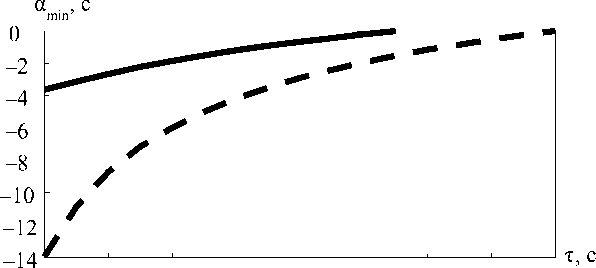
Отметим, что матрицы жесткости и вязкости S eig и V eig в терминах естественных синергий являются диагональными, в то время как матрицы S и V в терминах суставных углов являются недиагональными, т.е. обеспечивают управление по полному состоянию. В некоторых работах (например, [24]) предполагается, что двигательное управление у человека при стоянии организовано независимо по суставным углам, а не по естественным синергиям, т.е. диагональными являются матрицы S и V . Однако, как показано на рис. 4, такое управление является менее эффективным. Эффективность управления сравнивается на рис. 4 по минимальным значениям показателя Ляпунова, которые достигаются путем оптимизации параметров пропорционально-дифференциального контроллера при независимом управлении либо по суставным углам, либо по естественным синергиям.
Оптимальные матрицы жесткости и вязкости при экспериментально полученных для робота PostuRob II инерционной и гравитационной матрицах C и D и при различных задержках в петле обратной связи рассчитывались по методу, описанному в [9] для случая независимого управления по естественным синергиям, а для случая независимого управления по суставным углам – по методу, описанному в Приложении. Как показано на рис. 4, независимое управление по естественным синергиям по сравнению с независимым управлением по суставам обеспечивает при тех же временных задержках гораздо меньшие показатели Ляпунова, т.е. более быстрые отклики на внешние возмущения. Например, для временной задержки в петле обратной связи т = 100 мс , которая использовалась в экспериментах с роботом PostuRob II, показатель Ляпунова в первом случае составляет а = - 5,0 с - 1 (т.е. характерное время отклика на внешнее возмущение tchar = | а - 1 1 = 0,2 с ), а во втором - а =- 1,26 с - 1 (т.е. tchar = 0,8 с). Более того, при независимом управлении по суставам показатели
0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 0,2
Рис. 4. Сравнение эффективности управления роботом PostuRob II по принципам независимого управления по суставным углам (сплошная линия) и независимого управления по естественным синергиям (штриховая линия) в зависимости от задержки в пропорционально-дифференциальномконтроллере. По оси ординат отложены минимальные значения показателей Ляпунова, которые достигаются при оптимизации матриц жесткости и вязкости в случае независимого управления по суставным углам и независимого управления по естественным синергиям Ляпунова становятся положительными при задержках т > 0,15 с, т.е. устойчивое пропорционально-дифференциальное управление роботом PostuRob II становится невозможным, в то время, как при независимом управлении по естественным синергиям (а значит, контролю по полному состоянию в терминах суставных углов) устойчивое управление остается возможным вплоть до задержки т = 0,20 с. Таким образом, управление по естественным синергиям при наличии задержек в петле обратной связи значительно эффективнее обычно используемого в робототехнике независимого управления по суставным углам.
В целом, проведенные эксперименты с роботом PostuRob II показали, что принцип независимого управления по естественным синергиям при наличии больших задержек в петле обратной связи эффективен для использования в робототехнике для управления движениями антропоморфных роботов в условиях гравитации. Успешная проверка применимости этого принципа на реальном механическом устройстве служит также дополнительным аргументом в пользу гипотезы о его использовании в живых системах.
Приложение
Пусть движение динамической системы описывается уравнением (1) в котором моменты сил T задаются уравнением (2) с диагональными матрицами S и V. Секулярное уравнение такой динамической системы имеет вид det (Cц2 - D + (D + S) e-цт + Vцe-цт) = 0.
Показатель Ляпунова определяется как максимальная вещественная часть у корней секулярного уравнения. Корни секулярного уравнения были найдены численно в диапазоне –10≤Re(µ)≤10 и 0≤Im(µ)≤50 с инерционной и гравитационной матрицами, экспериментально полученными для робота PostuRob II. Показатель Ляпунова α(τ, S , V ) оценивался как максимальная действительная часть у корней в этом диапазоне. Численное решение динамического уравнения (1) с учетом (2) было выполнено для того, чтобы убедиться, что корни с вещественной частью, превышающей α, отсутствовали. Оптимальными матрицами S и V полагались те, которые обеспечивали минимальный показатель Ляпунова для каждой заданной задержки τ.
Благодарности
Настоящее исследование поддерживалось грантами РФФИ № 15-04-05598а и 16-04-00962а, а также программой Президиума РАН «Актуальные проблемы робототехники».
Список литературы Управление движением антропоморфного робота по принципу естественных синергий у человека
- Александров А.В., Фролов А.А., Масьон Ж. Стратегия поддержания равновесия при наклоне корпуса на узкой опоре у человека // Российский журнал биомеханики. - 2002. - Т. 6, № 4. - С. 63-78.
- Александров А.В., Фролов А.А., Хорак Ф.Б., Карлсон-Кухта П., Парк С. Биомеханический анализ стратегий поддержания равновесия при вертикальном стоянии человека // Российский журнал биомеханики. - 2004. - T. 3, № 3. - C. 30-47.
- Александров А.В., Фролов А.А. Параметры петли обратной связи двигательного управления при наклонах корпуса человека // Российский журнал биомеханики. - 2009. - Т. 13, № 2. - С. 49-68.
- Александров А.В., Фролов А.А. Организация прямого двигательного управления при наклонах корпуса человека // Российский журнал биомеханики. - 2010. - Т. 14, № 3. - С. 19-35.
- Alexandrov A.V., Frolov A.A., Massion J. Biomechanical analysis of movement strategies in human forward trunk bending. I. Modeling // Biol. Cybern. - 2001. - Vol. 84. - P. 425-434.
