Управление космическим аппаратом дистанционного зондирования Земли с помощью роторов

Автор: Алексеев А.В., Голушкова А.О.
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Математическое моделирование и обработка данных
Статья в выпуске: 1, 2024 года.
Бесплатный доступ
В статье рассматривается способ переориентации спутника -гиростата дистанционного зондирования Земли с помощью двигателя-маховика в случае расположения объекта наблюдения вне плоскости орбиты космического аппарата. В ходе исследования выведены геометрические зависимости углов нутации и прецессии от времени, построены дифференциальные уравнения движения космического аппарата относительно центра масс, получены их решения и построены соответствующие графики зависимостей параметров движения от времени. Полученные зависимости позволяют оценивать влияние инерционномассовых характеристик системы, начальных условий на движение спутника. Построены зависимости управляющих вращением роторов моментов от времени, что позволило оценить параметры необходимых для этих целей двигателей. В статье представлены результаты проведенных исследований, показывающих работоспособность разработанной математической модели. Практическим приложением может являться использование полученных результатов при нацеливании космических аппаратов на объект наблюдения.
Гиростат, роторы, математическая модель, уравнения движения, дистанционное зондирование, углы эйлера, угловая скорость, кинетический момент
Короткий адрес: https://sciup.org/148328380
IDR: 148328380 | УДК: 51-7 | DOI: 10.18101/2304-5728-2024-1-18-27
Control of the Earth remote sensing spacecraft using rotors
The method of reorientation of a satellite-gyrostat for remote sensing of the Earth using a flywheel engine is considered, at any location of the spacecraft relative to the object of observation. In the course of the study, geometric dependences of the angles of nutation and precession on time were derived, differential equations of motion of the spacecraft relative to the center of mass were constructed, their solutions were obtained and corresponding graphs were constructed. The obtained equations make it possible to determine the motion parameters (coordinates and velocities) depending on the inertial mass characteristics of the system, initial conditions and time, as well as to control the effect of these parameters on the system. The article presents the results of the conducted research showing the operability of the developed mathematical model, thanks to which it is possible to determine the control actions for the reorientation of the gyrostat satellite. A practical application may be the use of the results obtained when aiming spacecraft at an object of observation.
Текст научной статьи Управление космическим аппаратом дистанционного зондирования Земли с помощью роторов
Задачи нацеливания космического аппарата (КА) на определенный объект земной поверхности не теряет своей актуальности. Одним из наиболее распространенных способов переориентации КА дистанционного зондирования Земли (ДЗЗ) для нацеливания камеры или антенны является использование двигателей малой тяги, которые подразделяются на несколько категорий: на сжатом газе, на монотопливе на двухкомпонентном топливе; специальные установки и двигатели на закиси азота, аммиаке, газообразных водороде и кислороде; электроракетные системы на базе импульсных плазменных, ионных и стационарных плазменных двигателей [1].
Все вышеперечисленные способы подразумевают использование рабочего тела, запас которого ограничен на борту КА. Для решения проблемы с топливом предлагается использовать двигатели-маховики на основе управляемого моментного бесконтактного двигателя постоянного тока 1. Подобные КА называют спутниками-гиростатами. Данный способ является более эффективным из-за отсутствия необходимости в расходе рабочего тела, как следствие, уменьшения рабочей массы КА.
Задаче исследования движения гиростатов посвящено достаточно много работ отечественных и зарубежных ученых, например, В. В. Румянцева [2; 3], В. Н. Кошлякова [4], А. И. Нейштадта и М. Л. Пивоварова [5], Й. Виттенбурга [6], В. С. Асланова и А. В. Дорошина [7; 8] и многих других. В подавляющем большинстве работ исследуются динамика и устойчивость движения гиростатов, но мало внимания уделяется определению законов движения и управляющих воздействий, обеспечивающих данные движения.
В статье [9] приведено построение управления КА с помощью одного ротора для нацеливания на объект, который находится в плоскости орбиты КА. В данной работе ставится задача нахождения управляющих моментов, действующих на роторы гиростата для нацеливания на объект, находящийся вне плоскости орбиты КА ДЗЗ.
1 Математическая модель
Предположим, спутник представляет собой динамически несимметричное тело (тело 4) с тремя одинаковыми динамически симметричными роторами (тела 1, 2, 3), оси вращения которых совпадают с главными осями инерции всей системы (рис. 1). Вывод математической модели движения подобных систем приведен в разных работах [2–8]. Для наглядности и удобства обозначения координатных осей и других параметров на рисунке 1 роторы изображены схематично (вне несущего тела). На самом деле роторы находятся внутри КА.
Динамические уравнения движения строятся на основании теоремы об изменении кинетического момента механической системы и примут вид:
Ap + (С - B)qr + Io 1 +1(qo3 - ro2) = Mx;
Bq + (A - C)pr + Id2 +1(ro1 - po3) = My;(1)
Ci- + (B - A)pq + Io3 +1(po2 - qo1) = Mz, 4 44
где A = £ Ai, B = £ Bi, C = £ Ci; Ai, Bi, Ci (i = 1, 2, 3) — главные момен-i=1 i=1
ты инерции роторов, вычисленные в своих связанных системах координат Ox i y i z i ( i = 1, 2, 3), а моменты инерции тела-носителя в системе координат Oxyz - A 4 , B4, C4 ; p, q, r — проекции угловой скорости несущего тела на оси системы координат Oxyz ; I = A 1 = B 2 = C 3 — осевые моменты инерции роторов. Правые части уравнений (1) представляют собой проекции момента внешних сил.
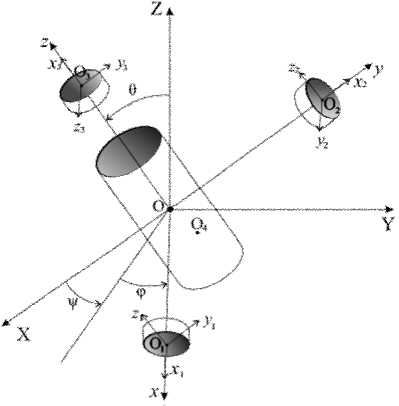
Рис. 1. Схема спутника гиростата и используемые системы координат
Кинематические уравнения для углов Эйлера несущего тела и углов относительного закручивания роторов:
p = / sin 9 sin ф + 9 cos ф ;
q = / sin 9 cos ф - 9 sin ф ;
r = / cos 9 + ф ;
o, = ct; o2 = в o3 = Y, где у, 9, ф — углы Эйлера, которые характеризуют положение несущего тела относительно кениговой системы OXYZ; а, в, у — углы относительного закручивания роторов; ох, <г2, <73 — относительные угловые скорости роторов.
Уравнения относительного движения роторов:
A 1 ( p + 7 1 ) = M 1 х + M а ;
B 2 (q + 7 2 ) = M 2 у + M в ; C 3 (Г + (7 3 ) = M 3 z + M Y, где Ma, Mp, MY — моменты внутреннего взаимодействия тел вдоль оси вращения; M 1 X, M2y, M3z — моменты внешних сил, действующие на роторы.
Компоненты векторов угловых скоростей роторов 0 ) 1 ( p 1 , q 1 , r 1 ) , со 2 ( p 2 , q 2 , r 2 ) , О 3 ( p 3 , q 3 , r 3 ) , выраженные через компоненты угловой скорости несущего тела, имеют вид:
p 1 = p + 7 1 ;
q 1 = q cos а + r sin a ; < r 1 = r cos a - q sin a ,
p 2 = p cos в - r sin P ; q 2 = q + 7 2 ;
r 2 = r cos в + p sin P ,
p 3 = p cos Y + q sin y ;
q 3 = q cos y - p sin y ; (4) r 3 = r + < 7 3 .
Таким образом, уравнения (1) - (4) представляют собой замкнутую математическую модель движения спутника-гиростата относительно центра масс. Приведенные уравнения при добавлении начальных условий позволяют определить все параметры движения системы в зависимости от времени.
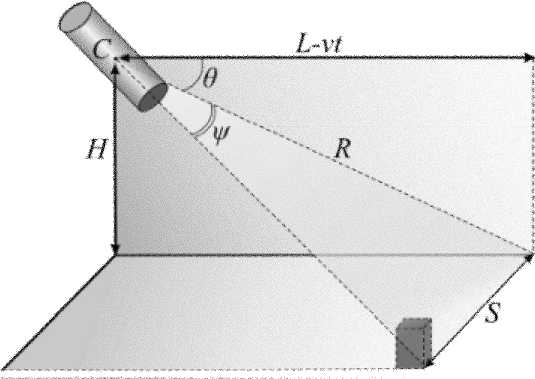
Рис. 2. Схема движения спутника-гиростата
С учетом перечисленных допущений уравнения движения спутника-гиростата преобразуются. Первые три из кинематических уравнений (2) примут вид:
p = 9;
q = у sin 0 ; (5)
r = у cos 0 .
Уравнения относительного движения роторов (3) запишутся следующим образом:
A 1 ( p + 7 1 ) = M a ;
B 2 ( q + 7 2 ) = M в ;
C 3 ( r + 7 3 ) = M , .
В уравнениях (1) правая часть обнулится, а уравнения (4) не изменятся.
Таким образом, ставится задача определения внутренних управляющих моментов M a , M р , M Y , обеспечивающих нацеливание КА ДЗЗ на объект наблюдения в течение некоторого интервала времени.
3 Определение управляющих моментов
0 и
В течение всего времени t активного участка полета углы нутации прецессии у могут быть определены по формулам (рис. 2):
L — vt
0 = arcctg H ,
7 H 2 + ( L — vt ) 2
у = arcctg----------------.
Подставим данные значения углов нутации (6) и прецессии (7) в кинематические уравнения (5), получим зависимости проекций угловой скорости несущего тела от времени:
Р =
Hv
H 2 + ( L - vt ) 2 ’
_ HSv (L - vt)
q (H2 +(L-vt)2)(S2 + H2 + (L -vt)2)’ r ______________Sv (L - vt)2______________
(H2 +(L -vt)2) (S2 + H2 + (L -vt)2).
Численно проинтегрируем систему дифференциальных уравнений (ДУ) (1) с учетом (8) при соответствующих начальных условиях. На рисунках 3-4 представлены зависимости относительных скоростей и ускорений роторов от времени.
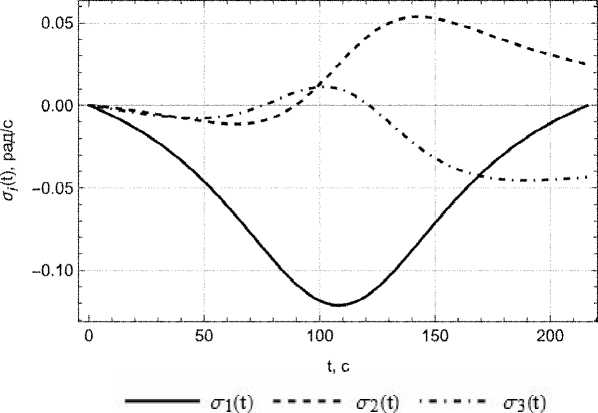
Рис. 3. График зависимостей относительных скоростей от времени
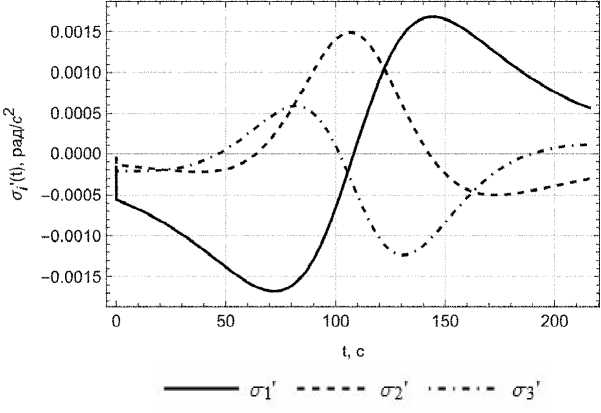
Рис. 4. График зависимостей относительных ускорений от времени
Подставим значения ускорений из решения системы ДУ (1) в уравнения относительного движения роторов и построим график зависимости управляющих моментов от времени (рис. 5).
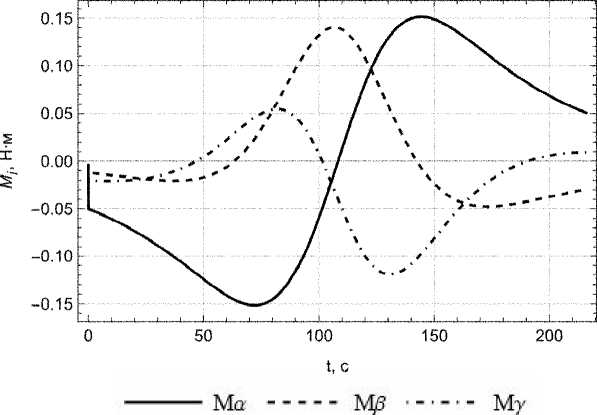
Рис. 5. График зависимостей управляющих моментов от времени
Полученные диапазоны значений управляющих моментов могут обеспечить двигатели-маховики, приведенные в [9].
Для визуального подтверждения верности полученных результатов построена анимация, визуализирующая движение спутника гиростата вблизи объекта наблюдения. Ось цилиндра, схематично изображающего
КА ДЗЗ, должна быть сонаправлена с прямой, соединяющей центр цилиндра и объект наблюдения. На рисунках 6–7 видно, что спутник точно направлен на объект наблюдения, что подтверждает работоспособность математической модели.
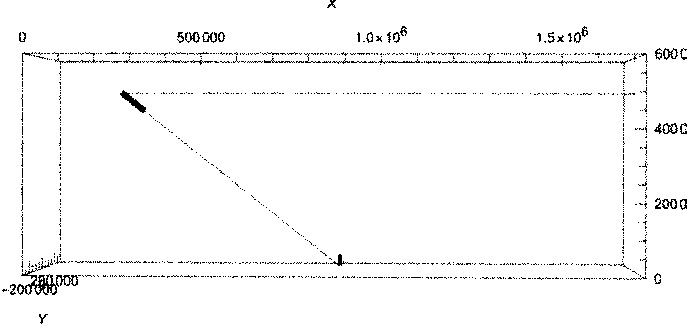
Рис. 6. Кадр визуализации, показывающий угол нутации θ
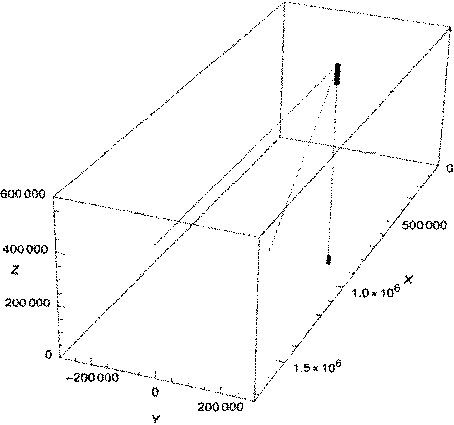
Рис. 7. Кадр визуализации, показывающий угол прецессии ψ
Заключение
В качестве основных результатов работы следует отметить определение законов изменения углов нутации и прецессии, обеспечивающих нацеленность КА ДЗЗ на объект наблюдения, получение зависимостей внутренних управляющих моментов от времени, оценку величины управляющего момента. Кроме того, проведено численное моделирование движения для проверки адекватности аналитических зависимостей.
Результаты работы могут быть использованы при проектировании КА ДЗЗ, использующих для переориентации частичную закрутку (маховики), а также для расчетов и моделирования движения существующих спутников-гиростатов.
Список литературы Управление космическим аппаратом дистанционного зондирования Земли с помощью роторов
- Рыжков В. В., Сулинов А. В. Двигательные установки и ракетные двигатели малой тяги на различных физических принципах для систем управления малых и сверхмалых космических аппаратов // Вестник Самарского университета. Аэрокосмическая техника, технологии и машиностроение. 2018. Т. 17, № 4. С. 115- 128. DOI: 10.18287/2541-7533-2018-17-4-115-128 EDN: VOMHCW
- Румянцев В. В. Об управлении ориентацией и о стабилизации спутника роторами // Вестник Московского университета. Сер. 1: Математика, механика. 1970. №. 2. С. 83-96.
- Румянцев В. В. Об устойчивости вращения тяжелого гиростата на горизонтальной плоскости // Известия академии наук. Механика твердого тела. 1980. № 4. C. 11-21.
- Кошляков В. Н. Задачи динамики твердого тела и прикладной теории гироскопов. Москва: Наука, 1985. 286 с.
- Нейштадт А. И., Пивоваров М. Л. Переход через сепаратрису в динамике спутника с двойным вращением // Прикладная математика и механика. 2000. Т. 64, № 5. С. 741-746.
- Виттенбург Й. Динамика систем твердых тел. Москва: Мир, 1980. 292 с.
- Асланов В. С., Дорошин А. В. О двух случаях движения неуравновешенного гиростата // Известия Академии наук. Механика твердого тела. 2006. № 4. С. 4255.
- Асланов В. С., Дорошин А. В. Стабилизация спускаемого аппарата частичной закруткой при осуществлении неуправляемого спуска в атмосфере // Космические исследования. 2002. Т. 40, № 2. С. 193-200. EDN: SXOQXP
- Алексеев А. В., Голушкова А. О. Переориентация космического аппарата дистанционного зондирования Земли с помощью роторов // Инфокоммуникационные технологии. 2023. Т. 21, № 2 (82). С. 24-29. EDN: EGDFOO
