Установившиеся вынужденные колебания системы твердых тел, установленных на упругом стержне

Автор: Мижидон Арсалан Дугарович, Дабаева Мария Жалсановна
Журнал: Вестник Бурятского государственного университета. Философия @vestnik-bsu
Рубрика: Математическое моделирование
Статья в выпуске: 9, 2015 года.
Бесплатный доступ
В статье предлагается общий подход к нахождению амплитуд вынужденных колебаний системы твердых тел, установленных на балке Эйлера - Бернулли с закрепленными краями, основанный на рассмотрении обобщенной математической модели. Под обобщенной математической моделью понимается система гибридных дифференциальных уравнений, заданной структуры, описывающая динамику произвольных систем взаимосвязанных твердых тел, прикрепленных упругими связями к упругому стержню.
Амплитудо-частотная характеристика, твердое тело, балка эйлера -бернулли, обобщенная модель
Короткий адрес: https://sciup.org/148183109
IDR: 148183109 | УДК: 517.98 | DOI: 10.18097/1994-0866-2015-0-9-68-75
Steady-state forced oscillations of solid system mounted on elastic rod
The article reviews a common approach to find forced oscillation amplitudes of solid system, mounted on Euler - Bernoulli beam with fixed edges. This approach is based on generalized mathematical model analysis. A generalized mathematical model is defined as hybrid differential equation system of given structure that describes dynamics of any systems of interrelated solids elastically mounted on elastic rod.
Текст научной статьи Установившиеся вынужденные колебания системы твердых тел, установленных на упругом стержне
Для вывода уравнений движения систем твердых тел, установленных на упругом стержне, используется вариационный принцип Гамильтона, который справедлив, как для систем с сосредоточенными, так и для систем с распределенными параметрами. Полученные на основании принципа Гамильтона, уравнения движений таких механических систем являются гибридными системами дифференциальных уравнений [1–3]. Под гибридными системами дифференциальных уравнений понимается система дифференциальных уравнений, состоящая из обыкновенных дифференциальных уравнений и уравнений в частных производных. В работе [4] была предложена обобщенная математическая модель балки Эйлера – Бернулли с закрепленными краями и прикрепленными на нем с помощью упругих связей произвольной системы твердых тел, соединенных между собой упругими связями. Обобщенная математическая модель таких механических систем, описывается системой гибридных дифференциальных уравнений [4]:
' Az + Bz + C ( Dz - u ) = 0,
d d i
k .2 < x , t ) + b ( x , t ) = Z qt ( d z ( t ) - u ( x , t)) 5 ( x - a i ),
. d t d x i = 1
где z(t) - n-мерная вектор-функция; u(x, t) - скалярная функция; u (t) - m-мерная вектор- функция с компонентами u(a1,t),•••,u(am,t); A, B - заданные, постоянные n x n - матрицы;
C - заданная, постоянная n x m - матрица; D - заданная, постоянная m x n - матрица; di - n-мерный вектор, составленный из строк матрицы D; k, b, ai, qi, (i = 1, m)
заданные
постоянные, причем 0 < a i < l ; штрих ()' - здесь и ниже операция транспонирования.
На функцию u ( x , t ) в зависимости от условий, накладываемых на правый и левый конец балки, задаются те или иные граничные условия. В частности, в случае жесткой заделки на концах имеем
u (0, t ) = 0, — (0, t ) = 0, u ( l , t ) = 0, — ( l , t ) = 0. d x d x
В данной работе развивается единый подход к построению амплитуд вынужденных колебаний системы, основанный на рассмотрении обобщенной математической модели (1).
1. Гармоническое силовое возмущение, приложенное к системе твердых тел
В случае действия на систему неконсервативных сил вариационный принцип Гамильтона может быть выражен следующим соотношением
[ ^( T - U ) + 5(0 ) dt = 0
t 0
где Т - кинетическая энергия системы, U - потенциальная энергия системы, 5о - виртуальная работа неконсервативных сил.
Вывод уравнений движения конкретных систем на основании принципа Гамильтона (3) приведет к появлению в гибридной системе дифференциальных уравнений дополнительных слагаемых, соответствующих внешним неконсервативным силам. Если гармоническое возмущение частоты о приложено к одному или нескольким твердым телам системы, то в правой части обыкновенных дифференциальных уравнений обобщенной модели (1) появляются выражения вида H sin o t
Az + Bz + C(Dz - u ) = H sin ot, k ^rur(x, t)+b l-u(x, t)=Z qi(d1Tz(t)- u(x, t))5 (x - ai), о t оx *"7
где H - n -мерный заданный вектор.
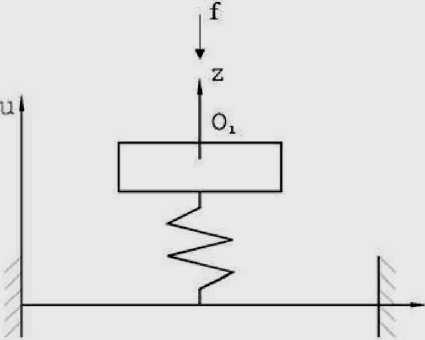
Действительно, для примера рассмотрим механическую систему, на массу т действует гармоническое силовое возмущение с частотой о и амплитудой f (рис. 1).
О а 1
Рис. 1. Механическая система «твердое тело на упругом стержне» с гармоническим силовым возмущениям, действующим на массу
Для данной системы имеем:
-
1. Потенциальная энергия пружины пропорциональна квадрату ее линейной деформации
-
2. Кинетическую энергию твердого тела можно записать в виде суммы кинетической энергии поступательного и вращательного движений:
-
3. Выражения для кинетической и потенциальной энергии стержня имеют вид:
U — c(z - и(a, t))2 1 2,
т - mz I I(p
T\ +
1 22
где I - момент инерции твердого тела относительно центра масс при повороте на угол ф .
-
1 л2 l -12„ а2
т 1 f J ди 1 , 1 fгт д и I л
F — — p F — ddx , U — — E EI —- dx ,
-
2 20 (5 t J , 2 2 0 (5 x 2 )
-
4. Работа неконсервативных сил в данной системе определяется следующим образом
где p - плотность материала стержня, F - площадь поперечного сечения, E - модуль упру- гости стержня, 1 - момент инерции поперечного сечения стержня относительно нейтральной оси сечения, перпендикулярной к плоскости колебаний.
8о — f cos o t 8 z .
Учитывая, приведенные выше соотношения, можем найти вариацию функционала действия (3) в виде tГГ/
JI (-mz - c (z - и (a, t)) + f cos ot^z +
t 0
£
+
% „ д2и
J c (z - и (x, t)) 8( x - a)-pF—-0 512
-
д4и 1х л E1—- 8udx дx4 J
Таким образом, из (5), в силу независимости вариаций координат получим уравнение движения системы
mz + c ( z - и ( a , t )) — Hcos ^ t ,
2a 84a
p F ^ 4 + E1 ^ 4 — c ( z - и ( x , t )) 8 ( x - a ).
д t 2 д x 4
Вернемся к рассмотрению системы (4). Будем искать вынужденные установившиеся колебания системы (4) z ( t ), и ( x , t ) ввиде
z ( t ) — Z sin o t , и ( x , t ) — V ( x )sin o t ,
где o - частота внешних возмущений, Z - n- мерный вектор амплитуд вынужденных колебаний тел, V ( x ) - амплитуда вынужденных колебаний точек упругого стержня,
Подставив в систему (4) z ( t ), и ( x , t ) в виде (7) после преобразований получим алгеброиче-ско-дифференциальную систему
'( - o 2 A + B + CD ) Z - CV — H ,
-o 2 kV ( x ) + b d V ( x ) — У q ( d" Z - V ( x )) 8 ( x - a , ), . dx t!
где V - m -мерныйвекторс компонентами V ( a 1 ), ^ , V ( a m ).
В силу граничных условий (2) функция V ( x ) должна удовлетворять условиям dV dV
V (0) — V ( l ) — 0, dV (0) — dV ( l ) — 0.
dx dx
Отметим в [4] было показано, что решение V ( x ) дифференциального уравнения из системы (8), удовлетворяющее условиям (9), при любом Z удовлетворяет соотношению
m
V ( x ) — £ G , ( x - a , ) qv(d i Z - V ( a^ .
I — 1
Пусть, при заданном значении и г (частота внешних возмущений), в соответствии с [4], найдены обобщенные решения G 1 ( x ), G 2 ( x ),..., Gm ( x ) уравнения
|
—го 2 kG ( x ) + b d G,(. x ) = 3 (x ), dx 4 |
(i = i,. |
.., n ), |
(11) |
|
удовлетворяющие краевым условиям Г G , ( — a^ = G , ( l — a^ = 0, |
|||
|
‘ dG , x dG, „ x A ( — a ) = "^( 1 — a ) = 0. 1 dx dx |
( i = i,.. |
., m ) |
(12) |
Принимая в (10) последовательно значения x = ai, x = a 2,..., x = a m , получим систему линейных алгебраических уравнений относительно V ( a 1 ), V ( a 2 ),..., V ( am ) . Объединив полученную систему с алгебраической системой из (8) получим линейную, неоднородную алгебраическую систему уравнений относительно вектора амплитуд Z и V
\— 6 2 A + B + CD ) Z — CV = H , NZ — MV = 0.
Здесь матрицы M , N определяются следующим образом
E G ( a i - a ) q d I E G ( a i - a ) qd 2...... E G ( a i - a ) q d
|
i = i m |
i = i m |
i = i |
|
|
N = |
E G , ( a 2 — a ) q , i = i |
d i i E G , ( a 2 — a ) qd 1 = i |
2...... E Gi ( a 2 — a i ) qd n i = i |
E g ( a , — a , ) qd’ E g , ( a . — a , ) qd 2...... E ' V a . — a ) qd.
v i = i i = i i = i /
Отметим, если, частота внешних возмущений не совпадает с какой-либо собственной частотой, тогда определитель системы (13) не равен нулю
A = det
— I
■ 6 9 2
A + B + CD
N
—
^ 0.
M )
Решив линейную систему
алгебраических уравнений (13) найдем n-мерный вектор амплитуд вынужденных колебаний масс Z , и амплитуды вынужденных колебаний точек крепления упругих связей к стержню V(a1),V(a2),..., V(am) . Амплитуды вынужденных колебаний произвольной точки x стержня найдутся по формуле (10).

■ ■
- mz t 0
I
- c ( z - u ( a , t ) ) ) 5 z + J ( c ( z
- u ( x , t ) ) 5 ( x - a ) +
+ f cos ю t 5 ( x
a u a u i
- a, - p F —-e EI o udx
17 a t 2 a x 4 J
dt = 0.
Таким образом, из (14) получим уравнение движения системы mz + c (z - u (a, t)) = 0
<
a i ) .
„ a2u a4u pF dp + EI dp = c (z - u (x, t)) 5 (x - a) + f cos юt5( x
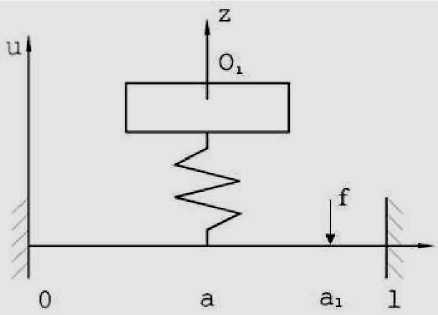
Рис. 2. Механическая система «Твердое тело на упругом стержне» с гармоническим силовым возмущением, действующим стержень
Поэтому, если на систему взаимосвязанных твердых тел, прикрепленных упругими связями к балке Эйлера - Лагранжа, действует гармоническое силовое возмущение с частотой го , приложенное в одной или в нескольких точках стержня, то в этом случае в правой части уравнений в частных производных обобщенной модели (1) появятся дополнительные слагаемые
Az + Bz + C (Dz - u) = 0, d u d u m 7ZT
<
k d"^ ( x , t ) + b ( x , t ) = У qt ( d z ( t ) - u ( x , t )) 5 ( x - a ) +
a t 2 a x 4 7=1
s
+У Hi sin rnt 5(x - a), i=1
где H i - заданные амплитуды внешних воздействий, приложенные в точке стержня с координатой a .
Подставив в систему (14) z ( t ), u ( x , t ) в виде (7) после преобразований получим алгебраическо-дифференциальную систему
( -ю 2 A + B + CD ) Z - CV = 0
„ d 4V(x. 1 ™„
^ —ю2kV(x) + b----(-) = У qi(d ‘Z - V(x))5(x - ai) + ,(15)
dx sE
+ У H i 5 ( x - a i )
_ i = 1
где V - m -мерный вектор с компонентами V ( a 1 ), — , V ( a m ).
Рассмотрим вспомогательную краевую задачу для алгебраическо-дифференциальной системы (15) с граничными условиями (9).
Теорема 1. При любых значениях Z для обобщенного решения V ( x ) дифференциального уравнения
-
- ю 2 kV ( x ) + b d V ( 4 x ) = У q i ( d i ‘ Z - V ( x )) 5 ( x - a i ) +] T H i 5 ( x - a i ) (16) dx i = 1 i = 1
справедливо представление ms
-
V ( x ) = £ G i ( x - a^qt(d i Z - V ( a i )) - V G ( x - a ) H i i = 1 i = 1
где функции G i ( x ), ( i = 1,..., m ) обобщенные решения уравнений
-ю2kG (x) + b^ ^i(x) = 5(x), (i = 1,...,m), i dx4
с граничными условиями
G i ( -a^ = G i (l - a i ) = 0,
G ( - a i ) = dG- ( l - a i ) = 0, ( i = 1,..., m ), dx dx
функции G i ( x ), ( i = 1,..., s ) обобщенные решения уравнений
-ю2 kG( x) + b d G‘( x) = 3( x), (i = 1,..., s), dx с граничными условиями
G i ( - a) = G ( l - a) = 0, G ( - a) = G ( l - a) = 0, ( i = 1,..., s ), dx dx
Доказательство. Представим (17) в виде ml
V ( x ) = £J ( G ( x - £ ) q i ( d i Z - V ( £ ) -5 ( § - a^ ) d ^ +
I = 1 0 x
sl
+ £J G ( x - ^ ) H, 5 ( ^ - a) d ^ .
I = 1 0
Отметив, если функция V(x) обобщенное решение [5] дифференциального уравнения (16), то для любой компоненты v(•,•) основной вектор-функции (у(•), v(•,•)) е K, при любом t е[0,T]
справедливо тождество l.
j Л 2 kV ( x ) + b 0 I
d 4 V ( x X) ,
———) I-v(x,t)dx = dx J

q i (d i Z - V ( a i )) v ( a i , t )
s
+E Hv (a, t), i=1
в справедливости представления (17) можем убедиться непосредственной подстановкой (18) в левую часть (17).
Пусть в соответствии с изложенным выше найдены обобщенные решения G 1 ( x ), G 2( x ),..., Gm ( x ) и G 1 ( x ), G 2( x ),..., G m ( x ) соответствующих уравнений, удовлетворяющие заданным согласно поставленной задаче краевым условиям.
Далее, принимая в (17) последовательно значения x = a 1 , x = a 2 ,^, x = a m , получим систему линейных алгебраических уравнений относительно V ( a 1 ), V ( a 2),..., V ( a m ) m
(1 + Gj (0)qjV(aj) + £G , (aj - a,)qV(a,)) = i=1, i * j(20)
= ]Г G(aj - ai)qidiZ + ]T G(aj - a)H, (j = 1,...,m). i=1
Используя матричные обозначения, систему (20) можно записать в виде
MV = NZ + b,(21)
где М и N матрицы, соответственно размерности m х m и m х n , такого же вида, как и в системе (13); b - m -мерный заданный вектор
У G,(a - a,)Hi i=1
s b =
У G , (a 2 - a , ) H ,
.
i = 1
s
У G , (a m - a)H ,
Объединив (21) с алгебраической системой из (15), получим систему линейных неоднородных алгебраических уравнений относительно вектора амплитуд Z и V
(-- ( 2 2 A + B + CD ) Z - CV = 0, NZ - MV = - b .
Eсли, частота внешних возмущений не совпадает с какой-либо собственной частотой, тогда определитель системы (22) не равен нулю. Решив линейную систему алгебраических уравнений (22) найдем n- мерный вектор амплитуд вынужденных колебаний масс Z , и амплитуды вынужденных колебаний точек крепления упругих связей к стержню V ( a 1), V ( a 2),..., V ( am ) . Амплитуды вынужденных колебаний произвольной точки x стержня найдутся по формуле (17).
Заключение
В работе на основе обобщенной математической модели предложен общий численноаналитический метод нахождения амплитуд установившихся вынужденных колебаний систем взаимосвязанных твердых тел, прикрепленных упругими связями к упругому стержню (балке Эйлера – Бернулли). Предложенный метод полностью теоретически обоснован и может быть положен в основу алгоритмического обеспечения построения амплитудо-частотных характеристик системы.
Список литературы Установившиеся вынужденные колебания системы твердых тел, установленных на упругом стержне
- Баргуев С.Г., Мижидон А.Д. Определение собственных частот простейшей механической системы на упругом основании//Вестник Бурятского государственного университета. -2009. -№ 9. -С. 58-66.
- Мижидон А.Д., Баргуев С.Г., Лебедева Н.В. К исследованию виброзащитной системы с упругим основанием//Современные технологии. Системный анализ. Моделирование. -2009. -№ 2(22). -С. 13-20.
- Мижидон А.Д., Баргуев С.Г. О собственных колебаниях механической системы каскадного типа, установленной на упругом стержне//Вестник ВСГТУ. -2010. -№ 1. -С. 26-32.
- Мижидон А.Д., Дабаева М.Ж. (Цыцыренова М. Ж.) Обобщенная математическая модель системы твердых тел, установленных на упругом стержне//Вестник ВСГТУ. -2013. -№ 6. -С. 5-12.
- Мижидон А.Д., Баргуев С.Г. Краевая задача для одной гибридной системы дифференциальных уравнений//Вестник Бурятского государственного университета. Математика и информатика. -2013. -№ 9. -С. 130-137.
