Устойчивое управление позой и движениями стоящего гуманоида по принципу естественных синергий у человека

Автор: Александров А.В., Мергнер Т., Фролов А.А., Хеттик Г., Муравьев И.П.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 1 (59) т.17, 2013 года.
Бесплатный доступ
Теоретически и экспериментально исследуются биологически адекватные принципы устойчивого управления движением тела стоящего гуманоида. Теоретическая часть основана на количественном анализе биомеханической модели тела человека с некоторыми типичными антропометрическими параметрами. Экспериментальная часть включает измерения на антропоморфном роботе, в котором реализованы принципы устойчивого управления, найденные теоретически. Анализ проводится в терминах движений вдоль собственных векторов динамического уравнения («собственных» (естественных) синергий, исследованных авторами ранее в экспериментах с движениями человека). Основным результатом работы явилось экспериментальное подтверждение возможности устойчивого управления реальным механическим антропоморфным роботом путем независимого управления каждой из естественных синергий.
Биомеханическая модель тела человека, антропоморфный робот, наклон корпуса, двигательное управление по обратной связи, pd-контроллер
Короткий адрес: https://sciup.org/146216090
IDR: 146216090 | УДК: 531/534:[57+61]
Текст научной статьи Устойчивое управление позой и движениями стоящего гуманоида по принципу естественных синергий у человека
Поддержание равновесия требует эффективной двигательной стратегии, обеспечивающей скоординированные движения многих звеньев тела, при которых общий центр тяжести не выходит за пределы, ограниченные размерами стоп. Подъем рук или наклон корпуса сопровождается динамическими взаимодействиями между звеньями, которые при отсутствии адекватной взаимной компенсации привели бы к падению или к существенному нарушению пространственной конфигурации тела. Способность поддерживать вертикальную позу позволяет человеку выполнять
Александров Алексей Владимирович, к.б.н., с.н.с. лаборатории математической нейрологии обучения, Москва
Мергнер Томас, профессор лаборатории неврологии, Фрайбург
Фролов Александр Алексеевич, д.б.н., к.ф.-м.н., профессор, заведующий лабораторией математической нейрологии обучения, Москва
Хеттик Георг, аспирант лаборатории неврологии, Фрайбург
Муравьев Игорь Петрович, н.с. лаборатории математической нейрологии обучения, Москва различные двигательные задачи в условиях, усложняющих сохранение равновесия, например, при отсутствии зрительного контроля, при стоянии на узкой или скользкой опоре, при подъеме тяжести, при наклонном положении корпуса, при движении опоры или неожиданных внешних возмущениях. Физиологические механизмы, обеспечивающие сохранение равновесия при стоянии, интенсивно исследуются в течение длительного времени. В результате проведенных исследований были выдвинуты различные гипотезы об особенностях функционирования этих механизмов [2, 5–9, 12, 13, 15, 19, 21, 25, 26]. В отличие от этого, механизмы поддержания равновесия антропоморфных роботов начали разрабатываться относительно недавно [14, 17, 19]. Физиологи получают пользу от применения технических методов и решений, в то время как специалисты в области робототехники имеют возможность учесть в своих разработках биологические решения, которые оптимизировались в ходе эволюции на протяжении миллионов лет. В настоящей работе исследуется возможность использования в робототехнике одного из принципов устойчивого управления движением тела стоящего человека для гуманоида (антропоморфного робота). Принцип основывается на независимом управлении собственными (или естественными) синергиями, т.е. движениями вдоль собственных векторов динамического уравнения. Гипотеза об их независимом управлении была выдвинута авторами ранее при исследованиях движения тела человека в сагиттальной плоскости [1–8]. Цель работы заключается как в дополнительной проверке самого принципа, так и в стимулировании интереса разработчиков в области робототехники.
Большинство работ, в которых делаются попытки формального описания механизмов поддержания равновесия у человека, ограничиваются моделированием тела человека в виде однозвенного перевернутого маятника, управляемого моментами сил относительно голеностопного сустава. Показано, что подобное управление обеспечивается PD -контроллером ( Proportional, Derivative ), в котором управляющие силы пропорциональны отклонениям угла в голеностопном суставе от желаемого равновесного значения и от скорости изменения этого отклонения [26]. Особенностью PD -контроллера у человека является наличие большой задержки в петле обратной связи (100–150 мс), что накладывает существенные ограничения на параметры PD -контроллера, которые бы обеспечили устойчивость управления [2, 7, 22].
В работах [1, 2, 5–7] авторами был предложен метод исследования движения тела стоящего человека в рамках многозвенной модели на основе собственных векторов динамического уравнения. В случае трехсуставной модели тела (голеностопный, коленный и тазобедренный суставы) при его движениях в сагиттальной плоскости выделяются три собственных вектора. Движения вдоль собственных векторов характеризуются согласованным изменением всех трех суставных углов и одновременно всех трех суставных моментов, т.е. и кинематической, и динамической синергиями. Такое уникальное свойство движений вдоль собственных векторов позволило назвать их «естественными синергиями». Уравнение движения для каждой из естественных синергий имеет такой же вид, как для однозвенного перевернутого маятника, что позволяет представить движение многозвенного перевернутого маятника в виде суперпозиции нескольких однозвенных. Более того, авторами было установлено [3, 4, 7, 8], что переход к описанию движения в виде суперпозиции естественных синергий есть не только формальный способ упростить анализ многозвенного движения, но и возможность показать, что естественные синергии являются независимыми единицами двигательного управления у человека.
Целью настоящего исследования является практическая проверка возможности применения принципов управления движением у человека на основе координации естественных синергий к управлению движениями двухзвенного антропоморфного робота PostuRob II, разработанного в лаборатории Т. Мергнера [11]. Управление реальной механической конструкцией отличается от компьютерного моделирования наличием большого числа неподдающихся учету факторов в виде различного рода нелинейностей, шумов, трения, люфтов и т.д. Множество подобных факторов присутствует и при управлении движениями живых систем, поэтому демонстрация возможности управления движениями робота, основанная на независимом управлении естественными синергиями, с одной стороны, позволяет рекомендовать такой подход при конструировании антропоморфных роботов, с другой стороны, является дополнительным аргументом, подтверждающим гипотезу об использовании этого принципа управления движениями тела человека.
Модель
Динамика движения тела человека в сагиттальной плоскости рассматривается на основе биомеханической модели в виде двухзвенного перевернутого маятника. Верхнее звено – корпус, включая голову и руки, нижнее – ноги, включая бедра и голени при фиксированном коленном суставе. Звенья маятника рассматриваются как тонкие твердые тела, вращающиеся вокруг двух идеальных цилиндрических шарниров, моделирующих голеностопный и тазобедренный суставы (рис. 1, а ).
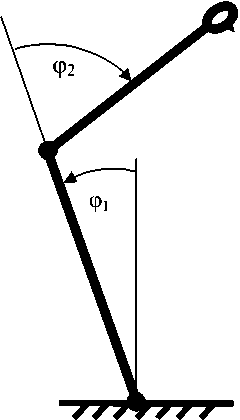
А -синергия
X
Н -синергия
а
б
Рис. 1. Биомеханическая модель тела человека: а – двухзвенная модель; б – схематическое графическое представление соотношений изменений суставных углов и суставных силовых моментов в естественных синергиях (движениях вдоль собственных векторов динамического уравнения для двухзвенной модели). Относительное расположение сегментов тела схематично представляет соотношение изменений суставных углов в каждой из синергий. Относительные размеры темных кружков на тазобедренном и голеностопном суставах схематично представляют соотношение изменений суставных силовых моментов в каждой из синергий
Уравнение движения двухзвенной системы твердых тел имеет вид
С ( ф ) ф - А ( ф , ф ) = T T со " , (1)
где φ – вектор углов в тазобедренном и голеностопном суставах; C – инерционная матрица; A – вектор центробежных и кориолисовых сил; T ext – вектор моментов внешних ( external ) сил; T сon – вектор суставных моментов управляющих ( control ) мышечных сил, компенсирующих внешние силы и обеспечивающих желаемое движение тела. В векторах φ, A, T ext и T con первая и вторая компоненты относятся соответственно к голеностопному и тазобедренному суставам. В настоящей работе в качестве внешних сил рассматриваются только гравитационные силы, т.е. T ext = T gr . В общем случае внешние силы могут включать также контактные (приложенные непосредственно к определенным точкам сегментов тела) и инерционные (связанные с горизонтальными движениями опоры).
Выражения для элементов матрицы C и для компонент векторов A и T gr приведены в [7] для трехзвенной модели, в которой угол в коленном суставе не полагался фиксированным (переход к рассматриваемой в настоящей работе двухзвенной модели очевиден). В численных расчетах для оценки данных параметров использовалась антропометрия стандартного человека весом 70 кг и ростом 170 см по таблицам [24].
Как показано во многих работах [2–4, 7, 8, 13, 21, 23], суставные моменты управляющих мышечных сил T сon , компенсирующих действие внешних сил T ext и обеспечивающих желаемое движение тела, могут быть описаны с помощью модели PD -контроллера с задержкой т в петле обратной связи. В этом случае
T con ( t ) = - T ext ( t -т ) + S ( ф des ( t ) - ф ( t -т ) ) + V ( ф des ( t ) - ф ( t -т ) ) , (2) где φ des ( t ) задает временной ход изменения суставных углов в желаемом ( desired ) движении, а S и V – матрицы жесткости и вязкости, элементами которых являются коэффициенты усиления в петле обратной связи.
Уравнение (2) описывает PD -контроллер, представленный, например, в работах [3, 4, 8], где в качестве внешних сил также рассматриваются только гравитационные. В более общем случае уравнение (2) приведено в работе [18], где предполагалось, что управляющие силы компенсируют также контактные и инерционные силы. Более того, в этом исследовании было предложено оценивать внешние силы согласно выражению
T ext ( t -т ) =- T con ( t -т ) + С о ф ( t -т ) , (3)
где С 0 – инерционная матрица С в линейном приближении в окрестности φ = 0. Как видно из уравнения (1), уравнение (3) дает оценку внешних сил в линейном приближении (см. также уравнение (5)). В настоящей работе оценка внешних сил также будет рассчитываться по уравнению (3). Таким образом, предполагается, что моменты управляющих мышечных сил описываются уравнением
Tcon (t)=-Text (t-т) + S(фdes (t)-ф(t-т)) + V(фdes (t)-ф(t-т))-Соф(t-т). (4)
В работе [18] обсуждаются физиологические механизмы, позволяющие центральной нервной системе оценивать значения T con ( t -т ) , ф ( t -т ) , ф ( t -т ) и ф ( t -т ) , необходимые для управления движением по обратной связи согласно уравнению (4).
Управление движением в терминах естественных синергий
Как было показано авторами ранее [2–4, 6–8], у человека управление движением тела в сагиттальной плоскости происходит путем независимого управления движениями вдоль собственных векторов динамического уравнения (1), представленного в линейном приближении:
С о ф - ^ф= T con .
В уравнении (5) суставные моменты гравитационных сил в окрестности φ = 0 представлены в виде T gr = D 0 φ , где D 0 – матрица с постоянными коэффициентами. Выражения для этих коэффициентов приведены в [7].
Линейное приближение позволяет провести разложение любого двухсуставного движения на две составляющие (два собственных движения, или две естественные синергии), каждая из которых представляет собой движение вдоль одного из двух собственных векторов w i линейного уравнения (5), удовлетворяющих условию
CoW-^-Dow/, где λ – собственные значения. Индексы = A, H соответствуют доминированию голеностопного (Ankle) или тазобедренного (H p) суставов в каждом из собственных векторов, см. уравнение (8), где первые компоненты в векторах w относятся к углу в голеностопном суставе, а вторые – в тазобедренном. Именно явное доминирование одного из суставных углов в каждой из синергий позволяет назвать их «А- и Н-синергиями».
Для стандартного человека собственные значения и собственные векторы A -и H -синергий (решение уравнения (6)):
X,= 0,11 с2, XH = 0,02 с2, (7)
AH
w a =
"-0,94"
v—0,34 v
wH
"-0,24 '
. 0,97 V
Соотношения изменений суставных углов и суставных силовых моментов в каждой из синергий схематично показаны на рис. 1, б .
Представление уравнения (5) в терминах собственных движений предполагает преобразование вектора суставных углов φ ( t ) в вектор кинематических амплитуд ξ ( t ) путем обращения уравнения
ф (t ) = W^ (t),
где столбцы матрицы W есть собственные векторы w , а каждая из компонент вектора ξ ( t ) определяет временной ход движения вдоль соответствующего собственного вектора.
В терминах собственных движений динамическое уравнение (5) принимает вид
^ - ^=ncon,
где n con = (D 0 W)~ 1 T con , а X есть диагональная матрица, коэффициентами которой являются собственные значения λ . Уравнение (4) в терминах собственных движений принимает вид
П con ( t ) = n con ( t -t ) + S eg ( ^ des ( t ) - ^ ( t -т ) ) - V eg ^ ( t -t ) - X^ ( t -t ) , (11)
где
S e/g = ( D 0 W ) - 1 SW , V e/g = ( D 0 W ) - 1 VW ,
S e g , V e g – матрицы жесткости и вязкости в терминах естественных синергий.
Независимое управление по каждой из введенных естественных синергий предполагает, что матрицы S eig и V eig диагональны. Тогда векторное уравнение (5) распадается на два скалярных уравнения, каждое из которых описывает движение однозвенного перевернутого маятника, управляемого своим PD -контроллером:
Ш t ) -^ , ( t ) =n Co" ( t ) , i = A , H , (13)
где
ЧГ (tH” (t-t)+Sf(if (t)"Mt-t))-If 4,.(t-т)-ХЛ,.(t-t). (14)
В случае однозвенного перевернутого маятника λ = J / mgh , η = T / mgh , S e g = S / mgh , V e g = V / mgh , где J – момент инерции маятника относительно оси вращения; m – его масса; h – высота положения центра масс над осью вращения; g – ускорение свободного падения; T – суммарный момент сил (кроме гравитационных) относительно оси вращения; S и V – параметры PD -контроллера.
Отметим, что собственное значение λ является показателем инерции соответствующего перевернутого маятника. Как показано на рис. 1, б , А -синергия соответствует повороту всего тела относительно голеностопного сустава, в то время как Н -синергия соответствует «складыванию» тела в тазобедренном суставе. Именно поэтому инерция λ А А -синергии более чем в 5 раз превосходит инерцию λ Н Н -синергии.
Преобразование, обратное к уравнению (12), позволяет получить матрицы жесткости и вязкости S и V (см. (2)) в терминах суставных углов:
S = D 0 WS eig W - 1, V = D 0 WV eig W - 1. (15)
В работе [7] показано, что матрицы S и V являются симметричными, но не диагональными. Таким образом, в отличие от управления естественными синергиями, управление отдельными суставными углами зависит не только от текущих значений данного угла, но и от углов во всех других суставах. Подобная реализация PD -контроллера, при которой коррекция по каждой степени свободы определяется значениями координат и их производных для всех степеней свободы, в литературе [9, 20] именуется « full-state feedback control » (управление по обратной связи с учетом всех степеней свободы). Однако в предположении независимого управления собственных движений количество параметров управления по обратной связи меньше, чем в случае « full-state feedback control », а именно, оно равно количеству коэффициентов диагональных матриц S e g и V e g .
Анализ устойчивости управления
Независимость PD -контроля каждой из естественных синергий позволяет проанализировать устойчивость движения всего тела путем отдельного анализа устойчивости движения для каждой из этих синергий, т.е. исследовать устойчивость движений отдельных однозвенных перевернутых маятников, описываемых уравнением (13). Устойчивость решений этого уравнения определяется собственными значениями однородного уравнения
X^(t)-^(t) =ncon (t) , где ncon (t)=ncon (t-t)-Sdg ^(t-t)-rigt(t-t)-X^(t-t).
Исключая из этих уравнений n con , получаем
Х^( t Н( t)=-;( t-т) - Seig!;( t-т)-V"gi;( t-т).
Характеристическое уравнение для (16) имеет вид р2Х -1 + (Seig +1) e~цt + p Veige-цt = 0.
Уравнение (17) при т > 0 имеет бесконечное число корней ц [2, 7] (ц = а + г го , где i есть комплексная единица). Решение уравнения (13) является устойчивым, если действительные части а всех корней уравнения (17) отрицательные. Максимальное значение действительных частей всех корней характеристического уравнения называется показателем Ляпунова. Таким образом, решение уравнения (13) устойчиво, если его показатель Ляпунова а < 0. Область значений S eig и V eig , в которой показатель Ляпунова не превосходит заданной величины а , определяется пересечением двух ветвей решения уравнения (17). Одна ветвь соответствует действительным корням (17), т.е. условию ц = а . При выполнении этого условия S eig и V e ig удовлетворяют уравнению прямой
S eig +а V eg + 1 + ( Ха 2 -1) e а t = 0.
Вторая ветвь соответствует комплексным корням ц = а + i го , где i есть комплексная единица. Тогда значения Seig и Veig , при которых µ является корнем уравнения (17), находятся как решение системы двух действительных уравнений
S eig cos гот+ Veig ( а cos гот+го sin гот ) = [1 +Х ( го 2 -а 2)] e а t - cos гот , S eig sin гот+ Veig ( а sin гот-го cos гот ) = 2 Хгоа e а t - sin гот .
На рис. 2, а приведены ветви решения уравнения (17) для значений показателя Ляпунова а = 0; -1,5; -3 с-1 при значении Х = 0,11 с2, соответствующем А -синергии для стандартной антропометрии. Задержка в петле обратной связи составляла т = 0,12 с.
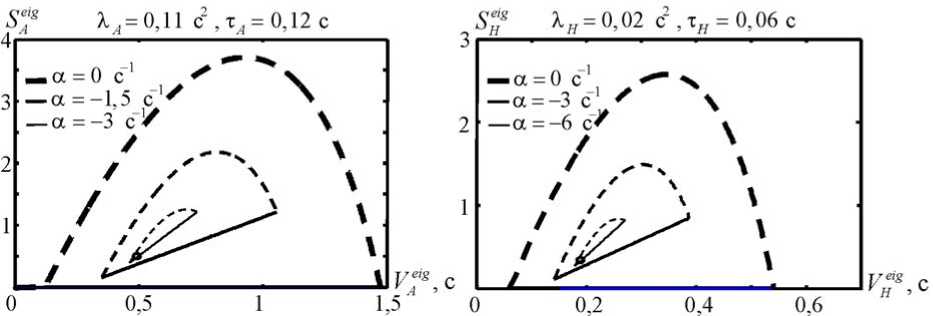
а
б
Рис. 2. Ветви решения характеристического уравнения (17), соответствующие различным значениям показателя Ляпунова а для стандартной антропометрии: а – А -синергия; б – Н -синергия. Сплошные линии – решения уравнения (18), пунктирные – решения системы уравнений (19). Оптимальные значения Soepigt
и Voepitg отмечены кружками (см. текст)
Данная задержка близка к экспериментально наблюдаемым [2, 3, 7, 8]. Сплошные линии соответствуют уравнению (18), штриховые – системе уравнений (19), в которых ω является параметром. Область значений Seig и Veig , в которой показатель Ляпунова не превосходит заданной величины α , ограничена снизу решением уравнения (18), а сверху – решением системы уравнений (19). Область, ограниченная решениями этих уравнений при α = 0 с–1, является областью устойчивости, так как для значений петли обратной связи Seig и Veig , лежащих внутри этой области, все корни уравнения (17) имеют отрицательную действительную часть. При уменьшении α сплошная линия, определяемая уравнением (18), сдвигается вверх, а штриховая линия, определяемая системой (19), сдвигается вниз. Поэтому область, ограниченная этими двумя линиями, сужается. При некотором критическом значении α min эта область исчезает. Значение α min определяет максимальную скорость коррекции внешних возмущений в биомеханической системе, описываемой уравнением движения однозвенного маятника (13) при заданных параметрах λ и τ . Параметры Seig и Veig петли обратной связи PD -контроллера, при которых достигается максимальная скорость коррекции внешних возмущений, можно назвать оптимальными. Для А -синергии (λ A = 0,11 с2, τ = 0,12 с) минимальное значение показателя Ляпунова равно α min = –4,5 с–1. Данное значение достигается при Soepigt = 0,5 и Voepitg = 0,49 c. На рис. 2 оптимальные значения параметров петли обратной связи Soepigt и Voepitg отмечены кружками.
На рис. 2, б области значений Seig и Veig , в которых показатели Ляпунова не превосходят заданной величины α ( α = 0; –3; –6 c–1), представлены для значений λ = 0,02 с2 и τ = 0,06 с, соответствующих Н -синергии [2, 3, 7, 8]. В этом случае оптимальные значения параметров петли обратной связи составили Soepigt = 0,34 и Voepitg = 0,19 c. Минимальное значение показателя Ляпунова – α min = –8,73 с–1. Таким образом, для Н -синергии максимальная скорость коррекции почти в два раза превосходит соответствующее значение для А -синергии. По экспериментальным данным [7] для девяти испытуемых показатель Ляпунова для А -синергии составлял от –0,5 до –1,7 с–1, а для Н -синергии – от –0,7 до –7,1 с–1.
Области устойчивости и максимальная скорость коррекции, достижимая с помощью PD -контроллера, в общем случае зависят от показателя инерции λ и задержки τ в петле обратной связи. Эти области представлены в [7] с максимальными и минимальными параметрами λ и τ для группы из девяти испытуемых. Показано, что
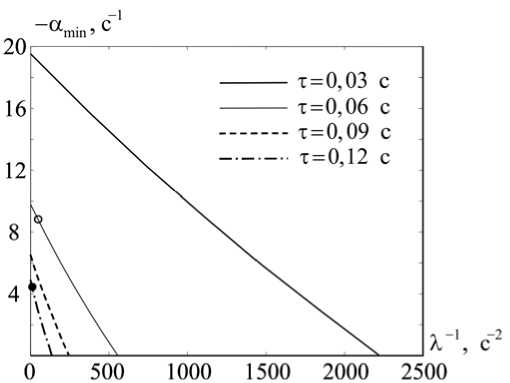
Рис. 3. Зависимость минимального показателя Ляпунова α min от показателя инерции перевернутого маятника λ и задержки в петле обратной связи PD -контроллера τ . Сплошным и открытым кружками отмечены соответственно значения α min для А -и Н -синергий для стандартной антропометрии
ISSN 1812-5123. Российский журнал биомеханики. 2013. Т. 17, № 1 (59): 94–109 101
области устойчивости уменьшаются при уменьшении λ и увеличении τ [7]. На рис. 3 представлены зависимости α min от λ и τ . Рисунок демонстрирует, что для каждой задержки τ есть критическое значение λ crit , при котором α min обращается в 0. При λ < λ crit не существует области устойчивости для данной задержки в петле обратной связи, т.е. устойчивое управление динамической системой, описываемой уравнением (13), невозможно обеспечить с помощью PD -контроллера. С другой стороны, для каждой задержки τ существует предельное значение α lim , которое достигается при λ → ∞ (λ–1 → 0 на рис. 3). Как показано на рис. 3, для τ = 0,06 с предельное значение составляет α lim = –9,76 с–1, а для τ = 0,12 с оно равно α lim = –4,88 с–1. Приведенные выше значения α min для А - и Н -синергий, которые отмечены на рис. 3 кружками, оказались близкими к предельным.
Управление движением антропоморфного робота
Как показано выше, теория независимого управления естественными синергиями (собственными движениями) позволяет относительно просто найти параметры устойчивого управления для многозвенной биомеханической модели стоящего человека. Возникает вопрос о возможности применения этой теории для управления движениями многозвенных антропоморфных роботов, параметры функционирования которых заведомо отличаются от идеальных вследствие наличия различного рода шумов, нелинейностей, люфтов, трения и т.д. В настоящей работе возможность ее применения была продемонстрирована на примере двухзвенного антропоморфного робота PostuRob II [11] при его движении в сагиттальной плоскости.
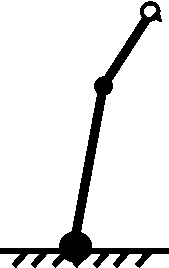
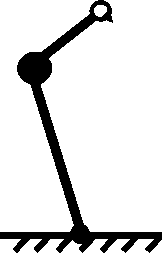
Описание робота
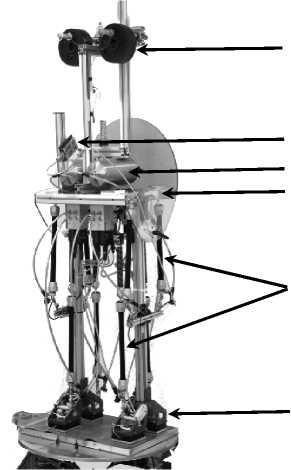
Робот был сконструирован с антропометрическими параметрами, близкими к человеческим. Он состоял из корпуса, двух ног и ступней, соединенных тазобедренным и голеностопным суставами (рис. 4). Сигналы от мехатронных датчиков суставных углов поступали на персональный компьютер в режиме реального времени.
a б в г
д
е
Рис. 4. Антропоморфный робот PostuRob II: а – груз; б – блок датчиков искусственной вестибулярной системы; в – система пневматики; г – тазобедренный сустав (датчики суставного угла и момента сил); д – пневматические «мышцы»; е – голеностопный сустав (датчики суставного угла и момента сил)
Модель независимого управления собственными синергиями реализовывалась контроллером в виде откомпилированной Simulink модели ( Real-Time Windows Target , The Math Works Inc. , Natick , USA ). Выход контроллера управлял силовыми моментами в тазобедренном и голеностопном суставах с помощью искусственных пневматических «мышц» ( FESTO AG & Co.KG , Esslingen , Germany ; Typ MAS 20). В экспериментах робот стоял свободно на твердой горизонтальной опоре. Он совершал активные синусоидальные колебательные движения корпуса и ног разной амплитуды и частоты в сагиттальной плоскости. Обратная связь сводилась к сигналам о текущих (с задержкой) значениях суставных углов и их скоростей. Регистрировались желаемый временной ход суставных углов, а также текущие значения суставных силовых моментов, которые поступали от датчиков мышечных сил. Данные оцифровывались с частотой 200 Гц.
Экспериментальное определение инерционной и гравитационной матриц робота
На первом этапе исследования для робота были экспериментально определены инерционная и гравитационная матрицы C 0 и D 0 уравнения (5), описывающего его движение в линейном приближении. Данные матрицы необходимы для вычисления по уравнению (6) собственных значений и собственных векторов уравнения движения, определяющих естественные синергии робота. С этой целью регистрировались изменения углов φ 1 и φ 2 в ответ на заданные моменты сил T 1 и T 2 относительно нижней и верхней осей вращения, которые соответствуют голеностопному и тазобедренному суставам у человека. Моменты сил изменялись по синусоидальному закону с различными амплитудами, частотами и сдвигами по фазе. Амплитуды моментов сил T 1 и T 2 изменялись в диапазоне от 2 до 30 Н∙м, соотношение амплитуд T 1 / T 2 – в диапазоне от 1 до 2, частоты – в диапазоне от 0,05 до 1,2 Гц, а сдвиг по фазе – от –0,3 до 0,3 рад.
Для определения коэффициентов матриц C 0 и D 0 использовалась регрессионная модель
Сф - D o 9 = T , (20)
параметрами которой являются пять независимых коэффициентов матриц C 0 и D 0 : p 1 = C 011 , p 2 = C 012 = C 021 , p 3 = C 022 , p 4 = D 011 , p 5 = D 012 = D 021 = D 022 . Таким образом, в регрессионной модели учитывалась симметричность матрицы C 0 и равенство трех коэффициентов D 012 , D 021 , D 022 матрицы D 0 , выражения для которых через антропометрические параметры приведены, например, в [3, 4, 8]. Формулы для расчета коэффициентов p 1 ... p 5 представлены в Приложении. Для расчета ф суставные углы ф аппроксимировались параболой в скользящем окне шириной 150 мс. В результате расчета по регрессионной модели были получены следующие коэффициенты:
C 011 = 68,2 Н • мс2, C 012 = C 021 = 23,5 Н • мс2, C 022 = 9,6 Н • мс2,
D oii = 473,9Н • м, D oi2 = D o2i = D 022 = 115,7 Н • м.
Решение уравнения (6) для полученных матриц С 0 и D 0 имеет вид
-
X, = 0,153 с2, Хя = 0,016 с2, A H
Г- 0,81 < Г- 0,34 )
w = , w = .
A (- 0,58 у H ( 0,94 )
Отметим, что кинематические паттерны естественных синергий и показатели инерции λ A и λ Н для робота PostuRob II и стандартного человека близки, хотя и не полностью совпадают (сравни уравнения (22) и (23) с уравнениями (7) и (8)).
Расчет параметров PD-контроллера
Экспериментальная проверка возможности устойчивого управления движениями робота PostuRob II путем независимого управления А - и Н -синергиями проводилась при задержках в петлях обратной связи т А = т Н = т = 0,1 с. При полученных показателях инерции λ A = 0,153 с2 и λ Н = 0,016 с2 и данной задержке оптимальные значения параметров PD -контроллера составляют
Sfpp = 1,1, Vf0" = 0,76 с, SHopp = 0,042, Vnopp = 0,14 с. (24)
AA НН
При этом показатели Ляпунова - аА = -5,6 с-1, аН = -3,8 с-1. В терминах суставных углов согласно уравнению (15) параметры PD-контроллера таковы:
S n= 489 Н • м, S 12 = S 21 = 172 Н • м, S 22 = 65 Н • м, V 1 = 341 Н ■ мс, Гг V 21 = 115 Н ■ мс, V 22 = 51 Н ■ мс.
Данные значения находятся в пределах известных из литературы значений для человека (см. обзор [7]).
Движения робота в сагиттальной плоскости
Устойчивость и точность управления с найденными параметрами PD -контроллера (24) проверялись на примере выполнения циклических синусоидальных движений робота в сагиттальной плоскости, при которых желаемое положение его общего центра тяжести XCG является фиксированным.
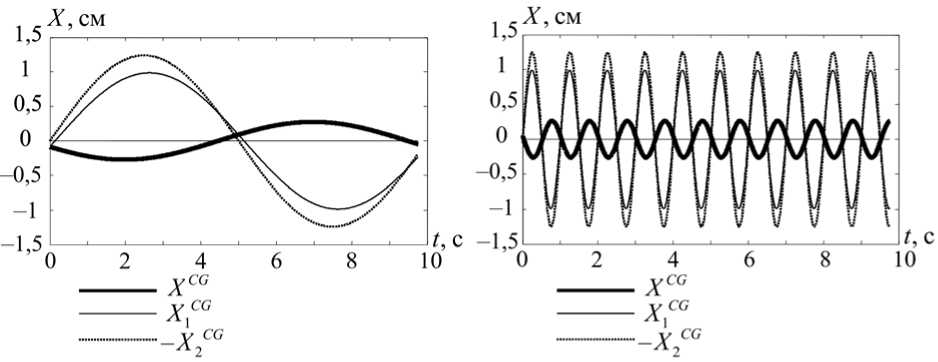
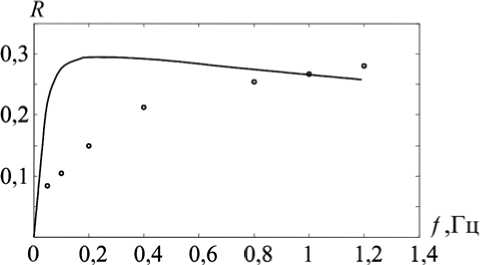
В линейном приближении XCG = X1CG + X2CG , где X1CG – перемещение центра масс за счет вращения всего тела вокруг нижней оси, X1CG = D011φ1 / Mg; а X2CG – за счет вращения только верхнего сегмента вокруг верхней оси, X2CG = D012φ2 / Mg; М – масса робота, М = 48 кг; g – ускорение свободного падения, а элементы гравитационной матрицы D011 и D012 задаются уравнениями (21). Координата XCG остается неизменной, когда Δφ1 / Δφ2 = –D012 / D011 = –0,244. Соответственно, для желаемой фиксации XCG изменения углов вращения вокруг нижней и верхней осей в уравнении для PD-контроллера (2) задавались в виде ode' = -0,244 A sin(2nftf Управляющие силовые моменты вычислялись по уравнению (4), в котором матрицы S и V задавались по уравнению (24), а значения углов ф1(t-т) и ф2(t-т) брались по экспериментальным записям. Экспериментально наблюдаемые движения робота, управляемые PD-контроллером с вышеуказанными параметрами, сравнивались с результатами решения динамического уравнения (5). При решении использовались инерционная и гравитационная матрицы, заданные уравнениями (21), которые были найдены по экспериментальным данным для робота, а управляющие силы задавались PD-контроллером с теми же параметрами, что и для робота. Как для робота, так и для его модели амплитуда желаемого изменения угла ^dfs для наглядности сравнения подбиралась таким образом, чтобы амплитуда перемещения центра тяжести X2CG равнялась 1 см. Частота циклических движений изменялась в диапазоне 0,05–1,2 Гц. На рис. 5 приведены данные, полученные для частот 0,1 и 1 Гц. Как показано на рис. 5, выбранные параметры PD-контроллера обеспечивают устойчивость движений и для робота, и для его модели. При этом амплитуды колебаний X1CG и X2CG были близки. Таким образом, движения нижнего сегмента, как и требовалось, компенсировали перемещения центра тяжести, связанные с движениями верхнего сегмента. Однако как а б в г Рис. 5. Экспериментально наблюдаемые перемещения центра тяжести XCG робота для частот колебаний верхнего и нижнего звеньев 0,1 Гц (а) и 1,0 Гц (б). Теоретически рассчитанные для данных экспериментов перемещения центра тяжести XCG робота для частот колебаний 0,1 Гц (в) и 1,0 Гц (г). Желаемое положение общего центра тяжести XCG фиксировано. Для удобства оценки точности взаимокомпенсации перемещений верхнего и нижнего звеньев перемещение X2CG показана с противоположным знаком. Отметим, что экспериментальные результаты на (а) и (б) схожи по амплитудам с теоретическими на (в) и (г), однако в некоторой степени искажены и сдвинуты по фазе вследствие неидеальности свойств робота для теоретических, так и для экспериментальных данных такая компенсация оказалась неполной. Неполнота компенсации объясняется различиями в преобразовании желаемых изменений углов ϕ1des и ϕ2des в наблюдаемые изменения углов ϕ1 и ϕ2 , т.е. различием в характеристиках передаточных функций для углов φ1 и φ2 в исследуемой динамической системе. Как показано на рис. 5, данные различия обусловлены как преобразованиями амплитуды, так и преобразованиями фазы. Для экспериментальных данных заметно также существенное влияние нелинейности этих преобразований. Рис. 6 иллюстрирует различия между экспериментальными данными и теоретическими расчетами для биомеханической модели на примере зависимости относительной амплитуды перемещений центра тяжести от частоты циклических движений робота. Относительная амплитуда R вычислялась как отношение стандартного отклонения суммарного перемещения центра тяжести XCG к стандартному отклонению перемещения центра тяжести X1CG, обусловленному движением нижнего звена: Рис. 6. Теоретическая (сплошная линия) и экспериментально полученная (окружности) зависимости относительной амплитуды R = std(XCG)/std(X1CG) колебаний суммарного центра тяжести от частоты циклических движений робота f R = std(XCG)/std(X1CG). Как показано на рис. 6, эти различия уменьшаются при уменьшении частоты. В пределе при стремлении частоты к нулю, когда стремятся к нулю также и силы инерции, перемещения центра тяжести, связанные с движениями нижнего звена, полностью компенсируются движениями верхнего звена. Количественные различия между теоретическими и экспериментальными данными могут быть связаны как с неточностью выбранных параметров механической модели робота, так и с неучтенным влиянием различного рода шумов, нелинейностей, люфтов, трения и т.д. Обсуждение результатов В исследованиях в области моторного контроля у человека и животных существует проблема динамической и кинематической избыточности, связанная с тем, что в двигательных актах участвует гораздо большее число мышц и суставов, чем требовалось бы для реализации необходимой комбинации суставных моментов сил и выполнения необходимой двигательной задачи. Соответствующие исследования проводились Н.А. Бернштейном [10], который показал, что живые организмы сводят двигательное управление к управлению с помощью определенного набора мышечных и межзвенных синергий, включающего в себя относительно небольшое количество их стереотипных комбинаций. Используемый в настоящей работе, как и в ряде предыдущих работ [1–8], подход демонстрирует преимущества моторного контроля, который основывается на управлении собственными движениями (или естественными синергиями). Они представляют собой движения вдоль собственных векторов динамического уравнения биомеханической системы и являются некоторыми стереотипными комбинациями суставных углов и суставных моментов, которые в этом случае могут рассматриваться как целостные единицы двигательного управления. Преимуществом такого управления является его значительное упрощение, поскольку естественные синергии могут управляться кинематически и динамически независимо друг от друга, тем самым не требуя учета всех степеней свободы при управлении по обратной связи некоторой одной степенью свободы («full-state feedback control» [9, 20]). При поддержании равновесия у прямостоящего человека центральная нервная система использует принцип управления по обратной связи, чтобы скомпенсировать различного рода непредсказуемые возмущения, например, движение опоры, внешние толчки и т.д. [2–4, 7, 8, 13, 21, 23]. Информация, используемая центральной нервной системой о действии возмущений, является результатом комбинированного влияния сенсорных сигналов различной модальности. Сенсомоторная интеграция объединяет проприоцептивную, зрительную, вестибулярную, тактильную и мышечную системы, каждая из которых имеет свои специфические характеристики и временные задержки в петлях обратной связи. Силовой ответ с нулевой задержкой определяется пассивными механическими свойствами мышц и сухожилий. Затем с задержкой около 50–80 мс включаются спинальные механизмы рефлекторного ответа. Наиболее высоколатентные механизмы автоматического ответа, связанные с головным мозгом, включаются еще позже и имеют латентность до 150–200 мс [21]. В рамках гипотезы о независимом управлении естественными синергиями эффективная задержка в петле обратной связи для каждой из синергий является результатом суммарного влияния всех этих механизмов. По экспериментальным данным, у человека [2, 7] для более инерционной А-синергии с показателем инерции λА = 0,11 с2 доминируют механизмы с большой латентностью и эффективная задержка составляет τА = 0,12 с. Для Н-синергии с показателем инерции λН = 0,02 с2 доминируют механизмы со средней латентностью, и эффективная задержка составляет τН = 0,06 с. Наличие большой задержки в петле обратной связи накладывает ограничение на ее параметры (жесткость и вязкость), необходимые для обеспечения устойчивости управления. Как показано на рис. 3, области устойчивости сужаются при возрастании временной задержки τ и снижении показателя инерции λ. Для каждой задержки τ существует критическое значение λ, при котором устойчивое управление с помощью PD-контроллера становится невозможным. В настоящей работе для независимого управления роботом по каждой из естественных синергий использовалась задержка, равная 100 мс. В соответствии с (22) для робота наименьший показатель инерции составил λН = 0,016 с2. Для этого показателя инерции устойчивое управление при задержке 100 мс оказывается еще возможным. В качестве оптимальных параметров управления были выбраны значения SA = 1,1, VA = 0,76 c, SН = 0,042, VН = 0,14 c, которые обеспечивали наименьшее значение показателя Ляпунова для каждой синергии, соответствующей уравнению движения для модели робота. Параметры модели в виде инерционной и гравитационной матриц С0 и D0 в уравнении (5) находились по экспериментальным данным методом регрессии. Область устойчивости для более простой модели тела в виде однозвенного перевернутого маятника, управляемого PD-контроллером с задержкой в петле обратной связи, представлена в [22]. Наилучшее совпадение расчетов по однозвенной модели с экспериментальными результатами достигалось при τ = 0,15 с. При этом показатель инерции маятника и параметры PD-контроллера в терминах уравнений (13, 14) составили λ = 0,102 с2, Seig = 0,33, Veig = 0,46 c. Отметим, что при данных значениях τ и λ оптимальные значения параметров PD-контроллера – Sopt = 0,25, Vopt = 0,40 c, т.е. экспериментальные значения близки к оптимальным. Основным результатом работы явилось экспериментальное подтверждение возможности устойчивого управления реальным механическим антропоморфным роботом по принципу независимого управления каждой из естественных синергий с параметрами петли обратной связи, вычисленными по модели робота. В модели учитывались только наиболее существенные (инерционные и гравитационные) характеристики робота и игнорировались присутствующие всегда в реальной механической системе такие факторы, как трение, нелинейности, шумы, люфты, ошибки измерений и т.д. Влияние этих неучтенных факторов отразилось лишь в незначительных отклонениях экспериментально наблюдаемых движений робота, но не повлияло на общий характер этих движений (см. рис. 5, 6). Отметим, что главной особенностью робота PostuRob II является имитация не только биомеханических характеристик тела, но и сенсорных систем человека [11, 16, 19]. Поэтому эксперименты с PostuRob II служат для проверки применимости физиологических принципов двигательного управления в робототехнике, а также решают и обратную задачу тестирования физиологических гипотез о принципах сенсомоторной интеграции с помощью технической модели. В этом смысле полученное в настоящей работе подтверждение о возможности устойчивого управления антропоморфным роботом может являться дополнительным аргументом в пользу выдвинутой гипотезы [1–8] о независимом управлении естественными синергиями у человека. Благодарности Настоящее исследование поддерживалось грантами РФФИ 12-04-01718-а, 11-04-12025-ОФИ-м и проектом IT4Innovations Centre of Excellence project, reg. no. CZ.1.05/1.1.00/02.0070. Приложение В соответствии с регрессионной моделью (20) моменты сил в нижнем Т1 и верхнем Т2 суставах вычисляются по формулам P1 Р1 + P 2 ф2 + P 4 1 + P 5 P2 = TV P2 P1 + P3 p2 + P5 P1 + P5 P2 = T2- Параметры регрессионной модели р = (р1, …, р5)Т находятся минимизацией невязки в = E (Т1 (t)-Т1 ехр (t)) +( Т2 (t) -Т2ехр (t)) между экспериментальными значениями Т1ехр и Т2ехр и вычисленными по регрессионной модели Т1 и Т2, т.е. по уравнению М р = r, где Mn=E Ф12, M12= M 21= M 23= M 32= Ф1Ф 2, M13= M 31= M 34= M43 = 0, M14= M 41 = E Ф1Ф1,M15= M 51 =E ф1Ф2 ,M 22 = E Ф12 + ttt M 24= M 42 = E Ф 2Ф1, M 25 = M 52 = E[^P 2Ф2 + ф1 ( Ф1 +Ф2 )] , M 33 = E ^ , tt t M 35= M 53 = E ^P 2 ( Ф1 +Ф2 ), M 44=Z Ф12, M 45 = M 54 =Z Ф^ M 55 = E Ф12 +( Ф1+Ф2 )" tttt r1 = E Т1ф1, r21=E( Т1ф 2 + Т2ф1 ) r3= E Т2ф 2, r4 = E Т1Ф1, r5 = E[ Т1Ф2 + T2 ( Ф1+Ф2 )]•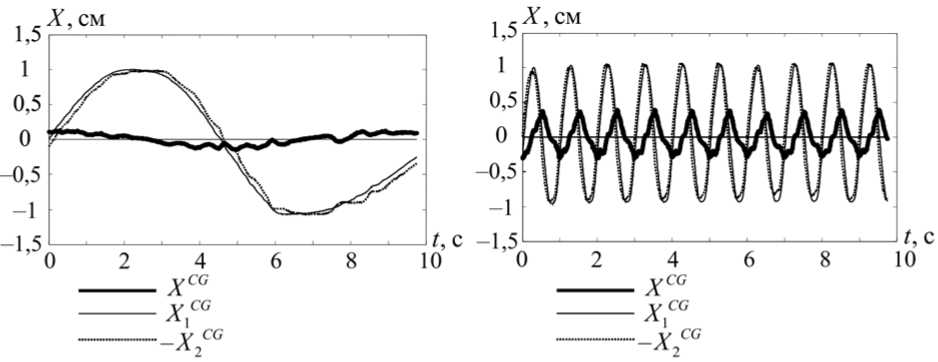
Список литературы Устойчивое управление позой и движениями стоящего гуманоида по принципу естественных синергий у человека
- Александров А.В., Фролов А.А., Масьон Ж. Стратегия поддержания равновесия при наклоне корпуса на узкой опоре у человека//Российский журнал биомеханики. -2002. -Т. 6, № 4. -С. 63-78.
- Александров А.В., Фролов А.А., Хорак Ф.Б., Карлсон-Кухта П., Парк С. Биомеханический анализ стратегий поддержания равновесия при вертикальном стоянии человека//Российский журнал биомеханики. -2004. -T. 3, № 3. -C. 30-47.
- Александров А.В., Фролов А.А. Параметры петли обратной связи двигательного управления при наклонах корпуса человека//Российский журнал биомеханики. -2009. -Т. 13, № 2. -С. 49-68.
- Александров А.В., Фролов А.А. Организация прямого двигательного управления при наклонах корпуса человека//Российский журнал биомеханики. -2010. -Т. 14, № 3. -С. 19-35.
- Alexandrov A.V., Frolov A.A., Massion J. Biomechanical analysis of movement strategies in human forward trunk bending. I. Modeling//Biol. Cybern. -2001. -Vol. 84. -P. 425-434.
- Alexandrov A.V., Frolov A.A., Massion J. Biomechanical analysis of movement strategies in human forward trunk bending. II. Experimental study//Biol. Cybern. -2001. -Vol. 84. -P. 435-443.
- Alexandrov A.V., Frolov A.A., Horak F.B., Carlson-Kuhta P., Park S. Feedback equilibrium control during human standing//Biol. Cybern. -2005. -Vol. 93. -P. 309-322.
- Alexandrov A.V., Frolov A.A. Closed-loop and open-loop control of posture and movement during human upper trunk bending//Biol. Cybern. -2011. -Vol. 104. -P. 425-438.
- Barin K. Evaluation of a generalized model of human postural dynamics and control in the sagittal plane//Biol. Cybern. -1989. -Vol. 61. -P. 37-50.
- Bernstein N.A. The co-ordination and regulation of movements. -London: Pergamon Press, 1967.
- Hettich G., Fennel L., Mergner T. Double inverted pendulum model of reactive human stance control//Multibody dynamics, CD Proceedings, ECCOMAS Thematic Conference, 3-4 July 2011/eds. J.C. Samin, P. Fisette. -Brussels, 2011.
- Horak F.B., Macpherson J.M. Postural orientation and equilibrium: handbook of physiology. -New York: Oxford University Press, 1996. -P. 255-292.
- Kuo A.F. An optimal control model for analyzing human postural balance//IEEE Transactions on Biomedical Engineering. -1995. -Vol. 42. -P. 87-101.
- Mahboobin A., Loughlin P.J., Redfern M.S., Anderson S.O., Atkeson C.J., Hodgins J.K. Sensory adaptation in human balance control: Lessons for biomimetic robotic bipeds//Neural. Networks. -2008. -Vol. 21. -P. 621-627.
- Massion J. Posture and equilibrium: interaction and coordination//Progress in Neurobiology. -1992. -Vol. 38. -P. 35-56.
- Mergner T., Maurer C., Peterka R.J. A multisensory posture control model of human upright stance//Progress in Brain Research. -2003. -Vol. 142. -P. 189-201.
- Mergner T., Huethe F., Maurer C., Ament C. Human equilibrium control principles implemented into a biped robot//Robot Design, Dynamics and Control. Romansy 16, Sixteeth CISM-IFToMM Symposium/eds. T. Zielinska, C. Zielinska. -Wien, 2006. -Р. 271-279.
- Mergner T., Schweigart G., Fennel L. Vestibular humanoid postural control//Jourmal of Physiology. -2009. -Vol. 103. -P. 178-194.
- Mergner T. A neurological view on reactive human stance control//Annual Reviews in Control. -2010. -Vol. 34. -P. 177-198.
- Park S., Horak F.B., Kuo A.D. Postural feedback responses scale with biomechanical constraints in human standing//Experimental Brain Research. -2004. -Vol. 154. -P. 417-427.
- Peterka R.J. Sensorimotor integration in human postural control//Journal of Neurophysiol. -2002. -Vol. 85. -P. 1097-1118.
- Peterka R.J. Comparison of human and humanoid robot control of upright stance//Jourmal of Physiology. -2009. -Vol. 103. -P. 149-158.
- Welch T.D., Ting L.H. A feedback model reproduces muscle activity during human postural responses to support-surface translations//Journal of Neurophysiology. -2008. -Vol. 99. -P. 1032-1038.
- Winter D.A. Biomechanics and motor control in human movement. -2 ed. -New York: John Wiley and Sons, 1990.
- Winter D.A., Prince F., Frank J.S., Powell C., Zabjek K.F. A unified theory regarding A/P and M/L balance in quiet stance//Journal of Neurophysiol. -1996. -Vol. 75. -P. 2334-2343.
- Winter D.A., Patla A.E., Prince F., Ishac M. Stiffness control of balance in quiet standing//Journal of Neurophysiol. -1998. -Vol. 80. -P. 1211-1221.
