Уточнение обобщенной математической модели системы твердых тел, прикрепленных к балке Эйлера — Бернулли

Автор: Мижидон А.Д., Хамханов А.К.
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Математическое моделирование и обработка данных
Статья в выпуске: 3, 2025 года.
Бесплатный доступ
В статье предлагается уточнение ранее разработанной обобщён- ной математической модели. Модель описывает динамику конструкции, состоя- щей из балки Эйлера — Бернулли, и прикреплённых к ней взаимосвязанных твёрдых тел. Уточненная модель учитывает случай с несимметричными точками крепления упругих элементов к телам, вследствие чего возникают неоднородные слагаемые в правой части уравнений. Это расширяет область её применимости и позволяет описывать более широкий класс механических систем, в которых точки крепления упругих элементов могут быть заданы произвольным образом. Предложен подход к определению положения равновесия в выбранной системе координат, позволяющий осуществить замену переменных в уточнённой модели и свести её к ранее изученной обобщённой математической модели.
Обобщенная математическая модель, твердое тело, балка Эйлера — Бернулли, гибридная система дифференциальных уравнений, положение равновесия
Короткий адрес: https://sciup.org/148332019
IDR: 148332019 | УДК: 51-7 | DOI: 10.18101/2304-5728-2025-3-50-58
Further Improvement of the GeneralizedMathematical Model of a System of Rigid Bodies Attached to an Euler — Bernoulli Beam
This article presents a refinement of a previously developed generalizedmathematical model of a mechanical system describing the dynamics of a structurecomposed of an Euler — Bernoulli beam and interconnected rigid bodies attached to it.In contrast to the earlier model, the refined model—constructed within a chosen coor-dinate system—includes nonhomogeneous terms on the right-hand side of the equa-tions. This extension broadens the model’s applicability and enables the description ofa wider class of mechanical systems in which the attachment points of elastic elementscan be specified arbitrarily.An approach is proposed for determining the equilibrium position within the cho-sen coordinate system, allowing a change of variables in the refined model and reduc-ing it to the previously studied generalized mathematical model.
Текст научной статьи Уточнение обобщенной математической модели системы твердых тел, прикрепленных к балке Эйлера — Бернулли
При моделировании механических систем, состоящих из упругих балок и взаимосвязанных твёрдых тел, возникают значительные трудности, обусловленные сочетанием сосредоточенных и распределённых параметров. Для корректного описания динамики таких систем возможно применение вариационного принципа Гамильтона — Остроградского. Результатом анализа полученных уравнений, описывающих движения различных механических систем, является обобщенная математическая модель для класса механических систем с расчетной схемой «тело (система тел) на балке Эйлера — Бернулли» [1-3] и выглядит следующим образом:
Aq + Cq + C ( Dq - u ) = 0,
2M 4'11 m (1)
a Z-U ( x , t ) + c ' u ( x , t ) = X k i ( d^q ( t ) - u ( x , t )) d ( x - a j,
I d t d x i = 1
где x — переменная по оси координат, совмещенной с покоящейся балкой; q(t) — n-мерная вектор-функция, характеризующая положение системы твердых тел;
u ( x , t ) — скалярная функция поперечных прогибов стержня, удовлетворяющая граничным условиям, определяемым типами закрепления его концов;
a i , ( i = 1, m ) — точки крепления пружин к балке, причем 0 < a i < l ;
u ( t ) — вектор-функция составленная из u ( a 1 , t ),..., u ( a m , t );
-
A , C — матрицы n x n ;
-
C — матрица n x m ;
-
D — матрица m x n ;
-
d‘ — вектор, состоящий из строк матрицы D ;
-
a = p F — погонная масса стержня;
-
c = EI — изгибная жесткость балки;
-
k i , ( i = 1, m ) — упругость пружин.
Система (1) представляет собой гибридную систему дифференциальных уравнений (ГСДУ) из обыкновенных дифференциальных уравнений и уравнений в частных производных. Гибридные системы подобного типа изучены недостаточно, и для их решения требуется разработка специализированных методов. Одним из таких методов является подход к исследованию свободных колебаний, описанный в работе [2].
Настоящая работа является обобщением ранее полученных результатов. Выполнено уточнение обобщённой математической модели в выбранной системе координат: в отличие от ранее рассматривавшийся гибридной системы дифференциальных уравнений уточненная модель включает неоднородные слагаемые в правой части, что позволяет более полно учитывать физические особенности системы.
Дополнительно предложен метод сведения уточнённой модели к ранее изученной задаче посредством подходящей замены переменных. Такая редукция обеспечивает применимость разработанных ранее аналитикочисленных методов исследования свободных колебаний, основанных на аппарате обобщённых функций [2; 4].
Построение решения опирается на метод определения положения равновесия системы, описанный в работе [5].
Таким образом, расширение класса рассматриваемых задач достигается за счёт одновременного уточнения модели и сведения её к известной постановке, что открывает возможность использования уже апробированных математических инструментов для анализа динамики системы.
-
1 Обсуждение к уточнению обобщенной математической модели
Ранее при выводе обобщённой математической модели (1) рассматривался упрощённый случай с фиксированными либо симметричными точками креплений пружин относительно центров масс твёрдых тел.
При произвольных точках крепления обобщенная математическая модель в выбранной системе координат в отличие от рассматриваемой ранее (1) будет содержать неоднородности в правой части. Откуда и возникает необходимость уточнения обобщенной математической модели.
Действительно. Рассмотрим применение вариационного принципа Гамильтона — Остроградского на примере механической системы (рис. 1).
Oxz — система координат, центр которой совпадает с точкой закрепления стрежня, а ось Ox направлена вдоль оси стержня.
O ‘ x ‘z' — подвижная система координат, связанная с твердым телом.
Состояние равновесия такой системы характеризуется параллельностью осей координат Oxz и О' x ' z ' .
Твердое тело может совершать поступательные движения вдоль оси Oz и совершать угловые колебания ^ . Перемещение точек стержня в направлении оси Oz описывается функцией u ( x )
z
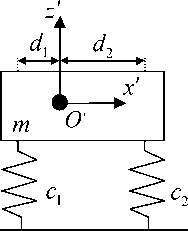
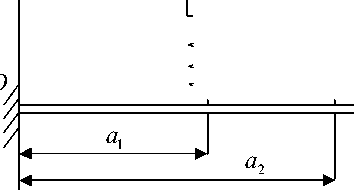
Рис. 1. Механическая система
«твердое тело, прикрепленное с помощью двух пружин к стержню»: m — твердое тело массой m ; a 1 и a 2 — точки крепления пружины к упругой балке;
C j и c 2 — упругая пружина; d 1 и d 2 — расстояние точек крепления пружин относительно центра подвижной системы координат 0 ' x’z’ ; l — длина упругого стержня
Ф
l
x >
Продемонстрируем вывод математической модели динамики системы. Данная система содержит как сосредоточенные и распределенные параметры. Так как рассматривается модель консервативной механической системы, то вариация функционала действия по Гамильтону будет иметь вид:
t 1
8J = 8 J (T - U) dt = 0,
t 0
где T и U являются кинетической и потенциальной энергией системы и будут иметь следующий вид:
T = T + Т , U = U + U
тела стержня , пружин стержня
Кинетическая энергия тела Tтела состоит суммы кинетической энергии поступательного и вращательного движений:
.7 Т ' 2
,
-
1 тела 2 2
где 1р — момент инерции твердого тела относительно центра масс при повороте на угол (р .
С учетом того, что движение тела по оси Ox отсутствует, а угол поворота р полагается малым, потенциальная энергия пружин будет иметь следующий вид:
U = С 1 ( z + z ‘ - d 1 ^ - U ( a i , t ))2
1 2
c 2( z + z ‘ + dxp - u ( a 2, t ))2
+ 2
где x ‘ , z ‘ — координаты точек крепления пружин к телe в системе координат О'x'z' ;
-
x , z — перемещение в неподвижной системе координат Oxz .
Потенциальная и кинетическая энергии стержня имеют вид:
Tcmep_ = тpF l^u I dx, Ucmep_= E^dU dx ,(6)
с^тер^жня с^тер^жня2
-
2o /d t 2 2o
где p F — погонная масса стержня, EI — изгибная жесткость балки.
Полное описание математической модели (рис. 1) с применением вариационного принципа Гамильтона — Остроградского изложено в работе [2] и имеет вид следующей ГСДУ:
mzo + c 1 [ z 0 + z ‘ — d 1 ф - u ( a 1 , t ) ] + c 2 [ z 0 + z ‘ + d2 p - u ( a 2, t ) ] = 0,
I v$ - c d 1 [ z 0 + z [- d 1 ф - u ( a 1 , t ) ] + c 2 d 2 [ z 0 + z ‘ + d2 p - u ( a 2, t ) ] = 0,
[ z 0 + z ‘ - d 1 ф - u ( x , t ) ] § ( x - a 1 ) +
d2 u 54u pF + EI = ci dt dx
+ c 2 [ z 0 + z ‘ + d2 p - u ( x , t) ] § ( x - a 2 ) .
Для наглядности перепишем (7) в виде:
mz0 + c [ z 0 - d 1 ^ - u ( a 1 , t ) ] + c 2 [ z 0 + d 2 (p - u ( a 2, t ) ] = - cz ’- c 2 z 2 ,
Ip p - cd 1 [ z 0 - d p p - u ( a 1 , t ) ] + c 2 d 2 [ z 0 + d2 p - u ( a 2, t ) ] = cd 1 z ‘ - c 2 d 2 z 2 ,
[ z 0 + z ‘ - d 1 ^ - u ( x , t ) ] S ( x - a 1 ) +
d2 u dr8 4 u pF + EI= ci dt dx
+ c 2 [ z 0 + z ‘ + d2 ^ - u ( x , t) ] S ( x - a 2 ) .
В правой части системы (8) имеем неоднородность, которая не позволяет использовать разработанные аналитико-численные методы исследования свободных колебаний [2; 3].
Замечание. В случае, когда что точки крепления упругих элементов равноудалены от центра масс твердого тела, то есть z‘= z‘= z, (9)
то неоднородности в ГСДУ (8) будут сокращаться, и она принимает вид обобщенной математической модели (1) с следующими коэффициентами:
q =
z 0 + z
V ^ )
( u ( a 1, t )
V u ( a 2 , t ) )
a = p F , c = EI , k 1 = c 1, k 2 = c 2,
( m 0
I 0 I, )
d1 =
1 Л
V d 1)
d2
(0 0^
C =
10 0)
(1Л
C =
V- c i d i
c 2 d 2 )
D =
— d 1
V1
d 2 )
2 Уточненная обобщенная математическая модель
Запишем неоднородности, зависящие от места расположения крепления жестких пружин, полученные в выражении (9) как n -мерный вектор b .
Тогда уточненная обобщенная математическая модель примет вид:
Aq + Cq + C ( Dq — u ) = b ,
m
— u (x, t ))8( x — ai) + ^ Pi8( x — ai), i=1
d u d u -m att(x,t)+ctt(x,t)=Xki(d q(t)
О t О X i = 1
где P i , ( i = 1,2,..., m ) — заданные числа.
Для приведения уточнённой модели к виду (1) предлагается воспользоваться подходом к нахождению положения равновесия системы, описанным в работе [5].
Предположим, что n -мерный вектор q и скалярная функция V(x) не зависят от времени t и являются решениями системы (10). При этом будут выполняться следующие условия:
q (0) = q , u ( x ,0) = V ( x ), 0 < x < l .
Тогда подставив их в (11), получим
'( C + CD ) q — CV = b ,
= d4V cтг(x)=£(ki(d q—V(x)+P)5(x—ai)’ dx i=1 1
где V — вектор составленных скалярных функций V ( a 1), V ( a 2), _ , V ( a m ).
Запишем краевые условия для функции V(x), соответствующие типу крепления стержня:
/ 1 ( V (0)) = 0, Y 2 ( V ( l )) = 0. (13)
И тогда для системы вида (12) с краевыми условиями (13) справедлива следующая теорема, с подробным доказательством которой можно ознакомиться в работе [5].
Теорема 1. При любых значениях q для обобщенного решения V ( x ) дифференциального уравнения системы (12), удовлетворяющего краевым условиям (13), справедливо представление
m
-
V(x) = Ent(x-ai)(ki(d-Tq - V(ai) + P),(14)
i = 1
где функции n i (x ), ( ' = 1,..., m ) — обобщенные решения уравнения
4m c in (x) = X 5( x),(15)
dx удовлетворяющие краевым условиям yM-ai)) = 0, Y2(ni(l- ai) = 0.
Воспользуемся теоремой 1. Подставим в соотношение (14) x = a i ,
( i = 1,2,..., m ) , п олучим систему уравнений относительно q , V :
Nq - MV = b1(17)
где M — матрица m x m :
^ 1 + П1(0) к 1 П 2( a1 - a 2) k2Vm (a1 - am ) km"
J1( am - a1) k 1 П 2( am - a 2) k2.............1 + Um (0) km7
N — матрица m x n :
(
En(a1- a) Pi i=1
m b1 =
E^ta2 - ai)Pi i=1
E n i ( a m - a i )P i x i = 1 7
Теперь запишем систему линейных алгебраических уравнений относительно q , V с учетом алгебраической части системы (12).
( C + CD ) q - CV = b , Nq - MV = b1.
Из полученной системы (18) мы можем найти значения векторов q и V , которые определяют положение равновесия системы (10). Для этого требуется найти функции n i (x ), ( i = 1,..., m ), являющиеся обобщенными решениями уравнения (15). C подробным описанием нахождения функций n i (x )можно ознакомиться в работе [5].
Заключение
При моделировании более широкого класса задач, учитывающих несимметричное расположение точек крепления пружин к твёрдым телам, возникает необходимость в уточнении ранее разработанной обобщённой математической модели системы взаимосвязанных твёрдых тел, соединённых с балкой Эйлера — Бернулли посредством упругих элементов. Несимметрия приводит к появлению неоднородностей в правой части уравнений, что обусловливает переход к рассмотрению гибридной системы дифференциальных уравнений (ГСДУ) вида (10).
Для ГСДУ (10) найденные положения равновесия q и V ( x ) в выбранной системе координат дают возможность перейти к новым переменным посредству замены:
q (t) = q (t) + q, u (x, t) = U( x, t) + V (x), что позволяет свести задачу к уже исследованной ранее обобщённой математической модели [1]. При этом переменные q%(t) u%(x,t) можно интерпретировать как переменные, описывающие колебания механической системы относительно положение равновесия.
