Уточненное описание управляемого движения верхней конечности при активации скелетной мышцы

Автор: Шилько С.В., Черноус Д.А.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 4 (82) т.22, 2018 года.
Бесплатный доступ
Разработано новое уточненное описание управляемого движения основных элементов опорно-двигательной системы человека в процессе активации скелетных мышц c учетом вязкости и нелинейно-вязкоупругого характера деформирования не только мышечных, но и соединительных тканей. В качестве базовой использована ранее предложенная авторами трехэлементная модель скелетной мышцы, состоящая из нелинейно-вязкоупругого элемента, описывающего деформирование оболочки мышцы, нелинейно-упругого элемента, описывающего деформирование актиновых и миозиновых нитей при сокращении мышцы, и сократительного элемента, формализующего актомиозиновое взаимодействие. С целью адекватного моделирования эквивалентной тяги, образованной мышцей и соединительными тканями, к трем перечисленным выше элементам последовательно присоединен нелинейно-вязкоупругий элемент, описывающий деформирование сухожилия. Для апробации предложенной биомеханической модели анализируется подъем груза верхней конечностью (рукой) человека. Проведенные расчеты показали возможность описания явлений «задержки» начала движения при активации мышцы и возникновения затухающих колебаний звеньев опорно-двигательной системы около равновесного состояния. В рассмотренном примере величина задержки составила 0,08 с, а период угловых колебаний - 0,55 с соответственно. При t > 1,5 c колебания практически прекращаются. Помимо рационализации спортивных тренировок и трудовой активности, разработанная модель и методика расчета представляют интерес для воспроизведения мышечной активации в «умных» материалах высокомолекулярной природы, используемых при создании интеллектуальных приводов и конструкций управляемой конфигурации.
Биомеханика, опорно-двигательная система, соединительные ткани, мышечная активация, стержневая модель, вязкоупругость
Короткий адрес: https://sciup.org/146282109
IDR: 146282109 | УДК: 531/534: | DOI: 10.15593/RZhBiomeh/2018.4.06
Improved description of controlled movement of the upper limb at activation of the skeletal muscle
A new, refined description of the controlled movement of the basic elements of the human musculoskeletal system in the process of activation of skeletal muscles has been developed, taking into account the viscosity and nonlinear viscoelasticity of muscular and connective tissues. As a basis, the three-element model of skeletal muscle, previously proposed by the authors, consisting of a nonlinearly viscoelastic element describing the deformation of the muscle shell, was used; a nonlinearly elastic element describing the deformation of actin and myosin filaments with a contraction of the muscle, and a contractile element formalizing the actomyosin interaction were used too. In order to adequately simulate the equivalent traction formed by the muscle and connective tissues, a nonlinearly viscoelastic element that deforms the tendon is connected to the three elements listed above. For approbation of the proposed biomechanical model, the lifting of the load by the upper limb (arm) of a person is analyzed. The performed calculations have shown the possibility of describing the phenomena of the "delay" of the onset of motion when the muscle is activated and the dying oscillations of the links of the musculoskeletal system occur near the equilibrium state. In the example considered, the value of the "delay" was 0.08 s, and the period of the angular oscillations was 0.55 s, respectively. At t > 1.5 s, oscillations practically cease. In addition to rationalizing sports training and work activity, the developed model and calculation method are of interest for the reproduction of muscle activity in polymer "smart" materials used in the creation of intelligent drives and controlled configuration designs.
Текст научной статьи Уточненное описание управляемого движения верхней конечности при активации скелетной мышцы
Эффективность управляемого движения тела человека во многом определяется текущим состоянием скелетных мышц. В настоящее время накоплен большой объем экспериментальных данных о биомеханических свойствах мышц и предложены модели для их структурно-функционального анализа. Реализация сократительной функции на микроуровне рассматривается как относительное скольжение актиновых и миозиновых нитей саркомера, обусловленное действием поперечных мостиков [16, 19, 24]. Упрощенный вариант описания данного процесса [3, 14], основанный на гипотезе
Шилько Сергей Викторович, к.т.н., заведующий лабораторией, Гомель Черноус Дмитрий Анатольевич, к.т.н., в.н.с., Гомель скользящих нитей, позволяет прогнозировать изменение зависимости текущей длины активированной мышцы, скорости сокращения и генерируемой силы во времени. В результате экспериментальных исследований препаратов мышечных тканей и частично извлеченных мышц [20], а также миометрических измерений в режиме in vivo [1, 17, 18] были определены диапазоны значений механических характеристик мышц в пассивном состоянии. Установлено, что скелетная мышца в пассивном состоянии при продольном удлинении деформируется как нелинейно-вязкоупругий объект, реономные свойства которого можно описать простым экспоненциальным ядром с одним временем релаксации [2]. Ранее авторами была предложена обобщенная модель скелетной мышцы [15], позволяющая по данным миометрии определить комплекс деформационных параметров мышцы, важных для описания процесса активации сократительной функции.
Учет биомеханических свойств скелетных мышц в формировании управляемых движений элементов опорно-двигательной системы возможен в рамках «веревочных» шарнирно-стержневых моделей [4, 8], в которых предполагается, что кости скелета являются жесткими массивными стержнями, соединенными в шарнирах (суставах). Скелетные мышцы моделируются нелинейно-вязкоупругими нитями (тягами). Вариант использования подобной модели был представлен в работе [15].
Вместе с тем для корректного описания работы активной тяги обобщенная модель скелетной мышцы нуждается в модификации, поскольку активная тяга является комбинированным объектом, образованным мышцей и системой соединительных тканей, в том числе сухожилиями. При моделировании процесса активации сухожилие можно считать нелинейно-вязкоупругим элементом, последовательно соединенным с мышцей. В ранее предложенной модели скелетной мышцы [17] этот элемент не учитывался. Отмеченная ограниченность модели существенно снижала точность расчетных оценок и не позволила сопоставить результаты моделирования с известными из литературных источников [6, 13] данными фотометрических исследований управляемых движений. В некоторых известных моделях скелетных мышц [9, 14] присутствуют упругие и вязкие элементы, которые могут быть поставлены в соответствие сухожилию, но при этом принимается допущение о линейной связи напряжений и деформаций упругого элемента.
Целью настоящей работы является описание движения элемента опорнодвигательной системы в процессе активации скелетной мышцы при комплексном учете вязкости и нелинейности деформирования соединительных тканей.
Модель эквивалентной тяги
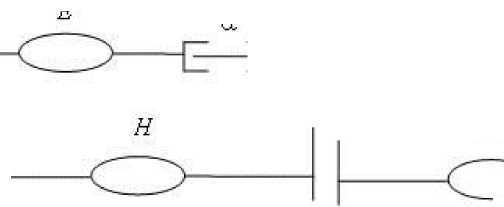
Ранее предложенная модель скелетной мышцы [15] образована тремя элементами (рис. 1, а). Нелинейно-вязкоупругий элемент Н описывает деформирование оболочки мышцы. Нелинейно-упругий элемент Е описывает деформирование актиновых и миозиновых нитей при сокращении мышцы. Сократительный элемент α вводится для формализации актомиозинового взаимодействия. При моделировании эквивалентной тяги, образованной мышцей и соединительными тканями, к трем перечисленным элементам последовательно присоединяется нелинейно вязкоупругий элемент S (рис. 1, б), описывающий деформирование сухожилия. Элемент Н характеризует деформирование мышцы в пассивном состоянии (при выключенном элементе α). Так как пассивная мышца не оказывает существенного влияния на механические свойства сухожилия [20], можно принять, что характеристики элементов S и Н совпадают. Ввиду того что жесткость соединительных тканей на порядок меньше жесткости нитей саркомера [3, 19], при последовательном соединении элементов Н и Е можно пренебречь деформацией последнего.
а
Рис. 1. Обобщенная вязкоупругая модель мышцы ( а ) и модель эквивалентной тяги ( б ): E – нелинейно-вязкоупругий элемент, характеризующий деформативность актиновых и миозиновых нитей саркомера; H – нелинейно-вязкоупругий элемент, характеризующий деформацию мышцы в пассивном состоянии; S – нелинейновязкоупругий элемент, характеризующий деформирование сухожилия;
a - сократительный элемент, характеризующий актомиозиновое взаимодействие
б
На рис. 2 показана модель эквивалентной тяги, где вышеуказанные допущения не являются принципиальными и введены для упрощения математической модели. Характеристики элемента H выбираются так, чтобы система из двух указанных элементов, соединенных последовательно, соответствовала деформированию сухожилия совместно с пассивной мышцей.
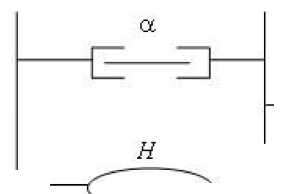
Рис. 2. Упрощенная модель эквивалентной тяги. Обозначения те же, что и на рис. 1
Работа сократительного элемента при максимальном уровне активации описывается системой дифференциальных уравнений [14, 17]
-
5 = k i [ z( £ - £ посл ) - 5 - n - m - p ] - k 4 5 , n = k 4 5 - d 8 n |£ - £ посл | , m = — k 2 m + d 8 n |£ — £ посл | ,
p = - к з p
при £ ^ £ посл и
-
5 = k 1 [ z( £-£ посл ) — 5 — n — m — P ] - k 4 5 ,
n = k 4 5 — d 8 n |£-£ посл| , m =— k 2 m , p = — k 3 P + d 3 n |£-£ посл |
(1а)
(1б)
при £ > £
Здесь s, n, m, p – число пассивных, тянущих, тормозящих и супертянущих поперечных мостиков соответственно, отнесенное к общему числу мостиков на половине длины саркомера a; k, k2, k3, k4 - временные константы образования и разрыва мостиков; ds = 137,5 - константа, равная отношению половины длины недеформированного саркомера к расстоянию между положениями равновесия тянущего и тормозящего мостика; г, £посл - продольная деформация эквивалентной тяги и последовательно соединенного с сократительным вязкоупругим элементом соответственно; z(еа) - кусочно-линейная функция деформации сократительного элемента (разность между £ и £п0сл), описывающая зависимость числа мостиков а от текущей длины саркомера.
0, £ < - 0,375;
а
1,545 + 4,12га, - 0,375 <£<- 0,167;
z ( £ а ) =
1 + 0,856 г а , - 0,167 <£ а < 0;
-
1, 0 <£ а < 0,125;
1,177 - 1,412 s , 0,125 < г < 0,833;
а а
^ 0, £а> 0,833.
Точка над символом в (1) и далее означает производную соответствующей величины по времени.
Система уравнений (1) описывает режим активации мышцы, соответствующий гладкому тетанусу [20]. Для анализа других режимов активации скелетной мышцы в первое уравнение системы вводится функция частоты и амплитуды стимулирующих импульсов [12]. В рамках настоящей работы будем рассматривать только тетаническое сокращение, описываемое уравнениями (1) без необходимости введения вышеуказанной функции.
Связь осевого напряжения оя c продольной деформацией £^ для нелинейновязкоупругого элемента Н может быть выражена дифференциальным уравнением [17]
СТ H + - ^ H = Q а^ С2 £ H exp (С*2 £ H )+ ^(exp (С2 £ н )- 1)
т 1-yL т
Здесь о. - удельная мышечная сила (отношение максимальной силы, генерируемой мышцей в изометрических условиях, к площади физиологического поперечника); C , C – константы, которые с приемлемой точностью могут быть приняты равными 0,05 и 2,4 соответственно для всех скелетных мышц [5]; Y - параметр ядра релаксации мышечной ткани ( у = 0,681 [17]); т - время релаксации мышечной ткани.
Для элемента, параллельно соединенного с сократительным, соотношение (3) примет вид
1 C
G + "% = ^ а ~
С2 (£ - £посл ) еХР (С2 (£ - £посл )) + ^(exP (С2 (£ - £посл )) - 1)
где апар - осевое напряжение в параллельно соединенном вязкоупругом элементе.
Для последовательно соединенного элемента получим о+-о=оа т
С _. х 1-V/
1 2 посл р\ 2 посл / \ р\ 2 посл / / ,
-
1 - Y L т _
где σ – эффективное осевое напряжение в эквивалентной тяге, определяемое соотношением
о =
T a
S 0
= (i - kS )Опар + kS° a ( n — m + 2 Р ) .
Здесь k – коэффициент, равный отношению физиологического поперечника S мышцы к эффективной площади поперечного сечения S эквивалентной тяги; T – усилие натяжения в эквивалентной тяге.
Уравнения (1), (4)–(6) позволяют установить связь осевого напряжения и продольной деформации эквивалентной тяги при активации мышцы. Для пассивной тяги зависимость о(а) совпадает с он (ая) и определяется уравнением (3).
Описание движения элемента опорно-двигательной системы
Рассмотрим движение упрощенной двухстержневой модели верхней конечности человека (рис. 3) при активации эквивалентного сгибателя. Стержень 1 модели, имеющий длину l и массу m , моделирует плечевую кость. Стержень 2 длиной l и массой m моделирует кости предплечья. Шарнир A относится к плечевому, а шарнир B – локтевому суставу. На конце стержня 2 закреплена точечная масса m , соответствующая поднимаемому рукой грузу. Эквивалентная тяга 4 , моделирующая двухсуставную мышцу (бицепс), крепится на расстоянии b от шарнира B и к неподвижному шарниру A . Малый стержень длины b перпендикулярен стержню 2 и жестко связан с ним. Этот стержень не имеет собственной массы и моделирует «плечо» бицепса в локтевом суставе [13].
При активации тяги груз 3 будет подниматься. В качестве обобщенных координат системы выберем углы ^ и ф2 отклонения стержней 1 и 2 от вертикального положения против хода часовой стрелки. В этих координатах уравнения Лагранжа второго рода [11] для рассматриваемой модели примут вид
.. .. .
ф] l2 I - m + m 2 + m 3 I + ф2 2 ljc cos ( ф 2 — ф1 ) — ф 2 2 Ус sin ( ф 2 — Ф1 ) =
— /m + m 2 + m3
g sin ф 1 — l Ta cos ( ф 2 — ф 1 — P a ) ,
m + 3 m + 4 mm .
ф 2 1 2 2 3 -----+ Ф 1 2 l i l C cos № — Ф 1 ) + Ф 1 2 l i l C sin ( ф 2 -ф 1 ) =
3 (m2 + m3)
= - l C ( m 2 + m 3 ) g sin ф 2 + bTa sin ( P a ) •
Здесь для краткости записи введены обозначения
1 2 ( m 2 + 2 m 3)
1c = ------ \ , Pa = arcsin
Ca
l i cos (ф 2 -ф 1 )
v V l i2 + b 2 - 2 l i b sin (ф 2 -ф 1 ) v
.
Текущая длина активной тяги может быть выражена через углы ф, и ф2. Для относительного удлинения (продольной деформации) тяги получим
а =
lx + b — 2 1дЬ sin ( ф2 — ф| )
l + Ь
— i.
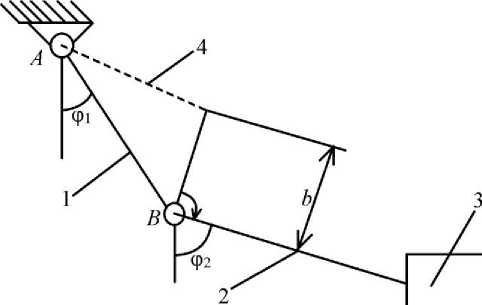
Рис. 3. Двухстержневая модель верхней конечности: стержень 1 моделирует плечевую кость; стержень 2 – кости предплечья; 3 – груз; тяга 4 – бицепс; шарнир A – плечевой сустав; шарнир B – локтевой сустав
Используя совместно соотношения (1), (4), (5), (7) с учетом (6), (8) и (9), получим систему восьми дифференциальных уравнений для определения временных зависимостей числа пассивных s , тянущих n , тормозящих m и супертянущих p поперечных мостиков, деформации £посл и напряжения стпа, углов отклонения ф1 и ф2. Явный вид данной системы не приводится в силу ее громоздкости. Численное решение системы дифференциальных уравнений при начальных условиях 5 (0) = 1 , n (0) = m (0) = p (0) = £mra (0) =П пар (0) =ф 2 (0) = ф 1 (0) =^ 1 (0) = 0, <о 2(0) = 0 реализовано в программном продукте MathCad .
В качестве примера использования разработанной математической модели рассмотрим подъем рукой груза массой т3 = 30 кг, результаты анализа кинограммы которого приведены в работе [7]. Исходные данные для двухстержневой модели следующие [24]: тх = 1,1 кг; m2 = 0,83 кг; 1г = 0,3 м; /2 = 0,34 м; b = 0,02 м. Значения временных констант, определяющих актомиозиновое взаимодействие при активации мышцы, заимствованы из работы [17]: к = 85,513 c-1; k2 = 316,25 c-1; k3 = 32 е-1; к4 = 122,192 е-1. В соответствии с работой [6], удельная мышечная сила бицепса принята равной са = 11,4 кг/см2 = 1,12 МПа, а по результатам исследования [12] время релаксации для данной мышцы составляет т = 35 мс. Физиологический поперечник мышцы Sy = 20 см2 и коэффициент ks = 0,8 подобраны таким образом, чтобы результаты расчета относительного угла поворота стержней модели Дф = ф2 — ф3 совпали с данными кинометрии [7] при t = 1,5 е; значение 8^ оказалось близким к среднестатистическому значению (23 см2) для данной мышцы [6].
На рис. 4 представлено сопоставление расчетных временных зависимостей величины Дф с экспериментальной. Можно отметить, что учет последовательного и параллельного нелинейно-вязкоупругого элемента позволяет получить более точные расчетные оценки кинематических параметров управляемого движения. Кроме того, в рамках усовершенствованной методики удается описать такие явления, как задержка начала движения при активации мышцы и наличие затухающих колебаний звеньев опорно-двигательной системы около равновесного состояния. Под задержкой здесь подразумевается начальный промежуток времени, в течение которого движение системы практически отсутствует. В рассматриваемом примере величина задержки составила порядка 0,08 с. На расчетной временной зависимости (см. рис. 4) данному участку соответствует пренебрежимо малое возрастание угла Δϕ . Наличие задержки, которая не обнаруживается при отсутствии элемента S в модели эквивалентной тяги (см. рис. 1), обусловлено, по-видимому, вязкостью соединительных тканей. При этом в эквивалентной тяге реализуется амортизация резкого возрастания генерируемой мышцей силы.
На втором этапе движения (от 0,08 до 0,4 с) отмечается значительная скорость роста исследуемой кинематической характеристики. При t > 0,4 c система совершает затухающие колебания около положения равновесия. В рассматриваемом примере период угловых колебаний Δϕ составляет 0,55 с. При t > 1,5 c эти колебания практически прекращаются. Подобные колебания являются характерным режимом движения для рассматриваемой динамической системы, содержащей массивные тела и упругие связи. В рамках модели, описанной в работе [23], деформируемость сухожилия не учитывается, что ведет к существенно завышенной расчетной оценке жесткости эквивалентной тяги. Прогнозируемые значения амплитуд колебаний системы около равновесного состояния оказываются более чем на порядок меньше соответствующих значений, полученных с учетом деформирования соединительных тканей (см. рис. 2). На кривой 2 (рис. 4) колебательное движение не выявляется.
На рис. 5 представлены расчетные временные зависимости силы натяжения T a в эквивалентной тяге. Можно отметить, что на начальном этапе активации (порядка 0,05 с) происходит скачкообразное увеличение силы T a . В дальнейшем рост силы в тяге происходит линейно вплоть до достижения максимального значения. Изменение силы T a при t > 0,3 c можно охарактеризовать как затухающие колебания около значения, соответствующего статическому равновесию системы. Продолжительность начального участка диаграммы T a ( t ), скорость роста на втором участке и амплитуда колебаний силы при t > 0,3 c возрастают при увеличении времени релаксации τ материала сухожилия.
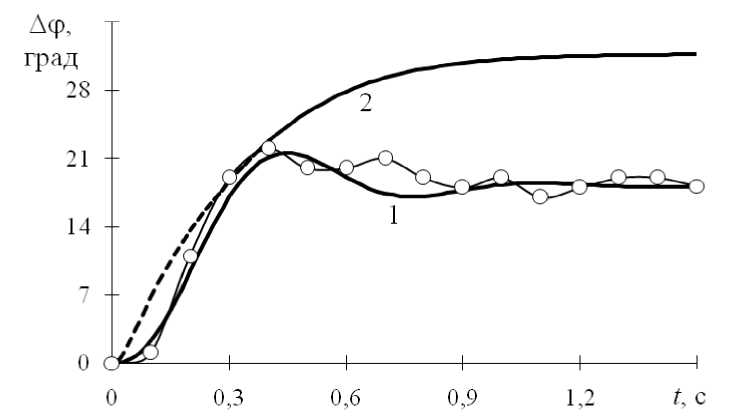
Рис. 4. Временная зависимость относительного угла поворота в локтевом суставе при подъеме груза: кривая 1 – расчет по разработанной методике; кривая 2 – расчет по методике работы [23], точками показаны результаты кинометрии из работы [6]
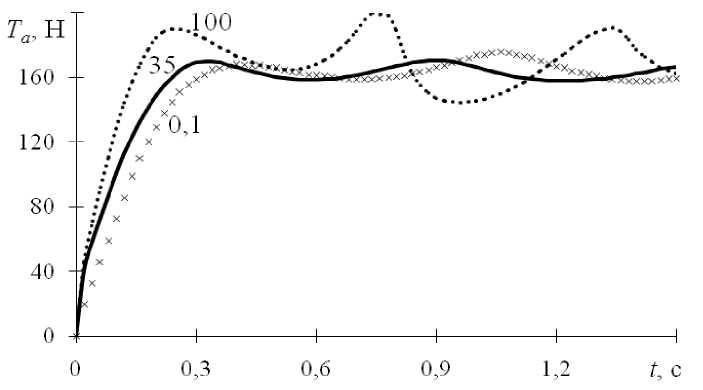
Рис. 5. Временные зависимости силы натяжения в эквивалентной тяге. Числа у кривых соответствуют значению времени релаксации τ , мс
Помимо очевидных биомеханических приложений (рационализация спортивных тренировок и трудовой активности [10]), разработанная модель представляет также интерес для воспроизведения мышечной активации в «умных» материалах высокомолекулярной природы, используемых, в частности, при создании интеллектуальных приводов машин и механизмов, а также конструкций управляемой конфигурации [21, 22].
Заключение
Показана возможность уточненного описания управляемого движения основных элементов опорно-двигательной системы с использованием модифицированных шарнирно-стержневых моделей, в которых мягкие биоткани (мышцы и сухожилия) представлены в виде нелинейно-деформируемых объектов. На примере подъема груза верхней конечностью показано, что предложенная формализация процесса актомиозинового взаимодействия и нелинейно-вязкоупругого деформирования сухожилий обеспечивает приемлемую точность расчета кинематических и силовых параметров. Модель может быть использована для рационализации спортивных тренировок и трудовой активности, а также при проектировании интеллектуальных приводов и конструкций управляемой конфигурации.
Б ЛАГОДАРНОСТИ
Исследование выполнено при финансовой поддержке государственной программы научных исследований «Конвергенция» (задание К3.06.13) и совместного белорусско-корейского проекта Т18КОРГ-004.
Список литературы Уточненное описание управляемого движения верхней конечности при активации скелетной мышцы
- Бондаренко К.К., Черноус Д.А., Шилько С.В. Биомеханическая интерпретация данных миометрии скелетных мышц спортсменов // Российский журнал биомеханики. - 2009. - Т. 13, № 1. - С. 7-17.
- Борисов А.В. Методы определения длин конечностей и звеньев человека с расчетом инерционных характеристик // Науч. тр. междунар. науч.-практ. конф. ученых МАДИ(ГТУ), МСХА, ЛНАУ, 2004. - М., 2004. - Т. 4. - С. 77-90.
- Дещеревский В.И. Математические модели мышечного сокращения. - М.: Наука, 1977. - 160 с.
- Зациорский В.М., Аруин А.С., Селуянов В.Н. Биомеханика двигательного аппарата человека. - М.: Физкультура и спорт, 1981. - 143 с.
- Зациорский В.М., Прилуцкий Б.И. Нахождение усилий мышц человека по заданному движению // Современные проблемы биомеханики. - 1992. - № 7. - С. 81-123.
