Вариационный принцип для сплошных сред, обладающих памятью формы

Бесплатный доступ
В рамках механики сплошной среды без анализа микрофизики явления рассматриваются две задачи деформирования сплавов с памятью формы: нагружение силами при постоянной температуре и «обратная деформация», сопровождающаяся затратами тепла, происходящая при другой, но также постоянной температуре. Каждый из этапов деформирования описывается своим вариационным принципом и для него доказывается существование обобщенных решений.
Механика сплошных сред, среды с памятью формы, вариационные принципы
Короткий адрес: https://sciup.org/147158565
IDR: 147158565 | УДК: 539.214;
Variational principle for shape memory solids
Within the frameworks of the continuum mechanics without the microphysics effect the author considers two stages of the shape memory alloy deformation: force deformation at constant temperature and «inverse deformation» characterizing by heat output and proceeding with different but constant temperature. Each of these deformations is described by its own variational principle for which existence of the generalized solutions is demonstrated.
Текст научной статьи Вариационный принцип для сплошных сред, обладающих памятью формы
Сплавы типа нитинола, механическое поведение которых интенсивно изучается в последние десятилетия [1–6], отличаются от большинства металлов тем, что после пластического деформирования силами и последующего нагревания способны восстанавливать первоначальную форму. Термодинамический анализ напряженно-деформированного состояния сплавов с памятью формы требует решения системы дифференциальных уравнений с разрывными функциями, что затрудняет доказательство существования решений в связной задаче термопластичности. В то же время квазистатическое деформирование внешней нагрузкой сплавов типа нитинола при постоянной температуре хорошо описывается феноменологически классической моделью Прандтля–Рейсса с трансляционным упрочнением [2–4], для которой справедлив вариационный принцип типа Рейсснера и доказывается существование обобщенных решений.
По-видимому, нельзя предложить физически приемлемый вариационный принцип, справедливый при произвольных деформациях и температуре. Поэтому цель настоящей работы состоит в том, чтобы отдельно рассмотреть две стадии деформирования сплавов с памятью формы: деформирование силами при постоянной температуре и «обратную деформацию», сопровождающуюся затратами тепла. Каждый из этапов деформирования описывается своим вариационным принципом и для него доказывается существование обобщенных решений.
В разд. 1 приводятся эвристические соображения по формулировке вариационных принципов для материалов с памятью формы без точного определения пространств вводимых функций. Математические определения и доказательства принципов содержатся в разд. 2. Главные трудности при доказательстве теоремы существования на основе вариационного принципа отчетливо проявляются на идеализированной модели, когда отсутствует упрочнение, а гладкая поверхность нагружения заменяется поверхностью Мизеса. Учет указанных факторов не вызывает дополнительных осложнений, в связи с чем эта упрощенная идеально пластическая модель изучается в дальнейшем.
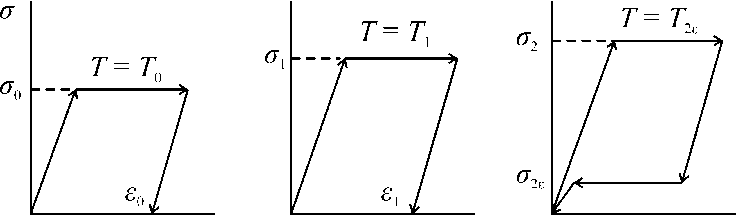
1. Формулировка вариационных принципов. При одноосном растяжении идеально пластических материалов с памятью формы кривые напряжение – деформация зависят от температуры и имеют вид, показанный на рис. 1, T 0 < T 1 < Т 2 Е . Деформирование при «комнатных» температурах Т 0 , Т 1 соответствует поведению идеальных упругопластических материалов с пределами текучести а 0 , а 1 . Если же испытание производится при температуре Т 2 Е , то наблюдаются две поверхности σ 1 и σ 2 ε на которых прослеживаются большие деформации разных знаков. Остаточная деформация в последнем случае отсутствует. Если а 2 Е ^ 0, то Т 2 Е ^ Т 2 и число Т 2 называют температурой восстановления формы.
Кривые на рис. 1 допускают другое толкование. Рассмотрим две стадии деформирования среды. На первой стадии приложим напряжения а < а0 при температуре Т0 . Затем снимем нагрузку и измерим остаточную деформацию ε0 . На втором этапе поднимем температуру до зна- чения T2 без дополнительного нагружения. Образец должен вернуться в первоначальное состояние. Упругопластическое поведение на первом этапе было изучено [7, 8]. Видоизменим изложенное в [7, 8], чтобы результаты стали применимы и ко второму этапу температурных деформаций.
-
а) б) в)
8 £ £
Рис. 1
Здесь k – предел текучести материала на сдвиг, sij – девиатор напряжений, σ ij – тензор напряжений, δ ij – символ Кронекера.
Следуя [9], будем называть тензор напряжений σ ij допустимым, если его девиатор удовлетворяет соотношению s 2 < 2 k 2. Если же девиатор s 0 удовлетворяет неравенству s 0 s 0 < 2 k 0 , k 0 < k , то отвечающий ему тензор & 0 назовем безопасным.
Выбираем в качестве определяющих параметров поведения континуума тензор напряжений σ i и скаляр λ , связанный с тензором скоростей пластической деформации ε i p зависимостью [10]
i zp = ^ - zi, ^e = e^ ki.(2)
Точкой обозначено дифференцирование по времени, ε ij – тензор скоростей деформаций, Eijkl – тензор модулей упругости. Тензор λ 2 ij возьмем по рекомендации Прагера [11, 12]
Плотность изменения внутренней энергии определим по формуле
U=Eijkl+i,(4)
Формальная свертка этого выражения с тензором σ ij приводит к равенствам
U = & j £ j ’ U = E ijkl & ij & kl + & ij z ij , а интеграл от последнего выражения по объему и времени равносилен первому началу термодинамики, если нет притока тепла ( q & = 0).
Таким образом, если принять закон Прандтля–Рейсса в качестве определяющего соотношения, то для внутренней энергии имеем выражение (4), где i = & j s Р .
Тот же результат получается, если формально потребовать выполнения соотношений (2)–(4) и вывести из законов термодинамики правило разделения деформации на упругую и пластическую части. Действительно, из первого начала термодинамики при q & = 0 следует
U = & ij £ ij = E - kl & ij & kl + j , (5)
что равносильно разделению деформации на упругую и пластическую части:
e gpp-
ε ij ε ij ε ijijkl σ kl ε ij .
Наконец, примем постулат Друкера о нормальности вектора ε i p j к поверхности нагружения (1) и найдем [13]
tf = ^psij , 4 = 0-
Подставляя выражения (7) в условие (1), определим параметр λ p и девиатор sij
AP= sjsj/2k2, stJ = k 2^ (sjsjГ1/2.(8)
Выражение для скорости изменения плотности внутренней энергии преобразуется к виду
U = f + h, f = E-^k, h = k ^(sj sj )12.(9)
Таким образом, постулируя соотношения (3), (4), обнаруживаем не только разделение деформации на обратимую и необратимую части, но и автоматическое выполнение первого начала термодинамики при изотермической деформации сплошной среды без притока тепла. Второе начало термодинамики также выполняется автоматически, поскольку выражение f можно отождествить со скоростью изменения свободной энергии Гельмгольца, а отсутствие подводимого тепла ( q & = 0) и выражение (9) дают соотношение
0 = q & < Ts & = h , где T – температура, а s & – скорость изменения энтропии, объединяющее в одной формуле два основных закона термодинамики при изотермическом нагружении, как это отражено в формулах (29), (30) работы [10].
В итоге получается, что постановка задачи изотермического деформирования упругопластических тел в окончательном виде не содержит ни температуры, ни законов термодинамики. Остается невыясненным, как преобразуется «скрытая теплота пластического плавления» h . Подразумевается, что эта часть энергии рассеивается в окружающую среду. Последний процесс протекает столь быстро (или деформация настолько медленная), что основные параметры течения не меняются. Именно такие процессы изучаются далее.
Аналогия между пластическим течением при постоянной температуре и плавлением была замечена Борном и Фюртом [14] – оба явления сопровождаются рассеянием внутренней (скрытой) энергии в окружающую среду. Формула (4), так же как уравнения Прандля–Рейсса, обеспечивает конкретный механизм рассеяния: вначале при постоянной температуре работа внешних сил преобразуется во внутреннюю энергию образца; последняя затем рассеивается во внешнее пространство с коэффициентом теплопроводности, равным бесконечности.
Пусть на упругопластическое тело, занимающее область D с границей д D = д D u + д Dp , действует система объемных сил X i , причем на поверхности д D u равны нулю скорости, а на д Dp -поверхностные силы. Интервал времени, в течение которого происходит деформирование, обозначим [0, t ]. Предположим, что в любой момент времени найдется безопасное статически допустимое распределение напряжений σ i 0 j , когда при любых скоростях vi имеет место равенство
J jj dx - J Xvdx = 0. (10)
DD
Задача об упругопластическом поведении среды состоит в нахождении таких тензора σij и вектора vi , чтобы для функции состояния U (σij,εijp ) (9) при любых σij выполнялись соотноше- ние (5) и уравнения (1), (7). Внутренний параметр λ определяется из равенств (2), (3), а вектор нагрузки Xi удовлетворяет равенству (10).
Было показано [7, 8], что сформулированная задача равносильна нахождению седловой точки функции Лагранжа
L ( P j , v i ) = 1 J E -^ ij ^ kl dV + J ( P 0
s ij - P & j S j ) dV , dV = dx 1 dx 2 dx3dt ,
2 D x [0, t ] D x [0, t ]
на множестве произвольных скоростей v i и девиаторов s2 < 2 k 2.
Если справедливо соотношение (10), то обобщенное решение (11) существует. Из этого факта вытекает выполнение равенства (6) и первого начала термодинамики в форме (5). Поскольку Л > 0, то справедливо второе начало термодинамики в форме неравенства Клаузиуса-Дюгема q < ts , (12)
так как в отсутствие внешнего теплового потока ( q & = 0) скорость изменения внутренней энергии может быть представлена в виде
Механический смысл существования седловой точки в сплошной среде состоит в следующем. До тех пор пока нагрузка такова, что можно указать в любой точке тела допустимый тензор 0
σ ij , решение существует.
Снизим нагрузку σ i 0 j до значения ε 0 σ i 0 j , где ε 0 – малое число. Пусть напряженному состоянию в точке xi , испытывающей при нагрузке σ i 0 j пластические деформации, отвечает в пространстве напряжений тензор A, а при нагрузке ε 0 σ i 0 j – тензор B (рис. 2). Нагреем тело до температуры T 2 ε (рис. 1,в).
Рассмотрим девятимерное многообразие R , ограниченное поверхностями { S : si = 2 k 2} и { S s : s i = 2 s2k 2}. Поверхность S ε – это результат подобного преобразования поверхности S с малым числом ε . Назовем тензор σ ij допустимым, если выполнено включение C j с R (рис. 3). Тензор у будем считать безопасным, если имеет место включение с- с R 0 . Многообразие R 0 с R , ограничено поверхностями { S 0 : s i = 2 к 02 } и { S 0 : s i = 2 s 1 k 2 }, а входящие в определения поверхностей постоянные удовлетворяют неравенствам к 02 < к2 , S 1 > S •
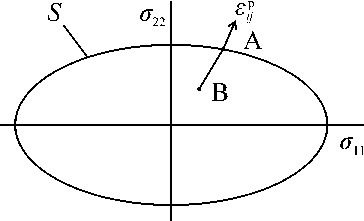
Рис. 2
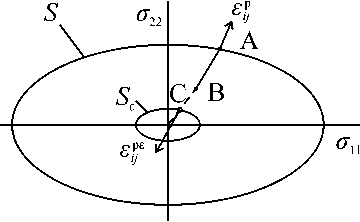
Рис. 3
возможна пластическая деформация sjs = -s j в силу подобия поверхностей S и Ss . Ясно, что приведенное рассуждение справедливо при отказе от постулата Друкера в первоначальной форме ((aj - су i*• )s j > 0 , где сj - действительное, ст J - любое возможное поле напряжений) и исполь зовании его локального следствия стjS j = 0 (либо условия Циглера об ортогональности термодинамических сил и потоков). Такой подход часто применяют в задачах термопластичности [15].
В качестве внутренних параметров среды выбираем тензор напряжений σij и работу χ , необходимую для «обратного» превращения [1, 2]. В соотношении (2) примем по аналогии с рис. 1,в тензор Л2j = у , где у - тензор напряжений в точке A (рис. 3). На поверхности Ss будем иметь равенство (9) при замене h на h 2 = к2^(8^ sip )1/2, (13)
Выражения (10) и (12) записываются в прежней форме.
Таким образом, имеем следующую аналогию: различие процессов деформирования материала с памятью формы (когда q & = 0) и «обратного теплового деформирования» в отсутствие сил в рамках механики сплошной среды заключается лишь в знаке ε ii p . Поскольку в обоих случаях внутренняя энергия зависит только от σ ij и ε i p i , в формуле для внутренней энергии (9) или (13) изменяется только коэффициент k . Роль «скрытой теплоты пластического плавления» h при обратной тепловой деформации выполняет «скрытая теплота обратного превращения» h 2 , а в первом начале термодинамики («при обратной деформации в отсутствие сил») скорость работы внешних сил σ ij ε ij заменяется скоростью подвода тепла q & .
Поэтому на этапе теплового деформирования надо найти тензор скоростей изменения напряжений σ & ij и вектор скоростей vi , такие, чтобы на допустимом множестве девиаторов sij выполнялось равенство (14) и существовала седловая точка функции Лагранжа (11), в которой ве-личина σ i 0 j заменена на ε 0 σ i 0 j .
В такой форме вариационный принцип будет доказан в следующем разделе. Затем устанавливается возможность перехода к пределу, когда е ^ 0.
По сути, метод доказательства существования решений эквивалентен введению малой вязкости в задачи жесткопластического течения, а вариационный принцип является видоизменением общих теорем в теории упругопластичности [16, 17].
-
2. Доказательство вариационного принципа. Переходим к математически строгой формулировке задачи. Пусть среда занимает трехмерную область D с границей д D = д D u + д D p . На части границы д D u задан вектор скоростей v i , а на д D p известен тензор скоростей напряжений с т ij . Будем изучать задачу на интервале времени [0, t ]. Определим четырехмерную область M = D х [0, t ] с границей
д M = дMu +дМп , д Mu = д Du х [0, t ], дМп =д Dn х [0, t ]. upuu pp
Введем гильбертово пространство функций H как пополнение дифференцируемых по времени тензоров σ ij в норме, определяемой скалярным произведением
M и пространство возможных скоростей как множество мер с нормой
IIvilU(M) = miax{ j £ij(vi,dm) + J I £ij(vi,dm) I},
’j M+ где принято M = M+ + M- , причем подобласти M+ и M- разбивают область M так, что внутри M+ знак eij положителен, а внутри M- отрицателен.
Пространство ограниченных деформаций BD ( M ) получается пополнением множества функций
2sij (vi, dm) = (д vi /XXj + д Vj /дxi) dm по норме (16). Это пространство не является рефлексивным, оно изучалось в связи с задачами вязкопластичности [7, 18]. В частности, доказано, что функции из BD(M) имеют след на кусочно-гладкой поверхности дDu , принадлежащий пространству интегрируемых функций [18]. Это позволяет записать следующее условие неподвижности границы дMu :
II <,( M ) = 0 . < 17)
Отсутствие напряжений на ∂ Mp запишем в виде
I σ ij ( ∂ M p ) L ∞ ( M ) = 0. (18)
Здесь L ∞ ( M ) – пространство ограниченных измеримых функций на множестве M .
Выделим в пространствах H и BD ( M ) множества σ ij и vi так, чтобы выполнялись условия (17), (18) и следующие соотношения (всюду далее, если не оговорено иное, интегрирование ведется по области M ) :
R={σij:σij∈L∞(M),2ε2k22≤si2j≤2k22,sij=σij-σkkδij/3,(19)
Условие (19) означает, что рассматриваются лишь допустимые напряженные состояния (рис. 3), а соотношения (20) и (21) – это первый и второй законы термодинамики.
Пусть, наконец, к телу приложена нагрузка, которая может быть уравновешена безопасным тензором напряжений σ i 0 j , и
2 ε 1 k 2 < sijsij < 2 k 02 , sij = σ ij - σ kk δ ij /3, k 02 < k 2, ε 1 > ε .
и докажем, что на множестве R × BD ( M ) с условиями (17)–(21) существуют σ ij , vi , которые соответствуют седловой точке функции Лагранжа L ( σ ij , vi ).
Доказательство состоит в проверке выполнения условий приводимой ниже теоремы [19]: если для множеств с ограничениями (15)–(22) существует элемент v 0 ∈ BD ( M ), такой, что
и выполняется соотношение liminfL(σij,vi)=-∞, vi ∈ BD(M), σij ∈ R, II vi IIBD(M)→∞,(25)
то функционал L ( σ ij , vi ) имеет на R × BD ( M ) седловую точку
L(σij,vi)=minsupL(σi′j,vi′)=maxinfL(σi′j,vi′)=m0 ,(26)
σi′j∈R vi′∈BD(M) vi′∈BD(M) σi′j∈R и среди σi′j, vi′ можно выбрать подпоследовательность, такую, что σi′j →σij слабо в H , а vi′ →vi слабо* в BD(M).
σ ij ∈ R
Здесь c , c 1 – некоторые постоянные. Неравенство (27) влечет выполнение соотношения (25), и смешанный вариационный принцип обоснован.
Если σ ij и vi – дифференцируемые по координатам и времени функции, то в равенстве (23) можно заменить область M на D и убедиться в справедливости закона Прандтля–Рейсса. В самом деле, вариацию L ( σ ij , vi ) представим в форме
D
Вследствие произвольности ( σ ij - σ i ′ j ) везде, кроме точек поверхности
Φ = si2j -2k22ε2=0,(29)
можно записать равенство
представляющее собой закон Прандтля–Рейсса, из которого следует, что для гладких функций, отвечающих течению на поверхности (29), соотношение (20) принимает вид
∫ q & dm = ∫ ((1 - ε ) k 2V2( ε ij p ε i p j )1/2) dm .
Интеграл в правой части написанной формулы неотрицателен, поэтому приток тепла имеет направленный характер, и второе начало термодинамики становится следствием первого.
Равенство (30) указывает также на возможность замены в условии текучести (1) поверхности (29) любой другой гладкой поверхностью Φ ( sij ) = 0. В формулах (8) нужно заменить sij на 1
∂Φ ∂ sij , а вместо выражения ( ε i p j ε i p j )2 подставить диссипативный потенциал, являющийся преобразованием Лежандра функции Φ .
Рассмотрим последовательность σ i ε j , vi ε , когда ε → 0 в условии (19). Так как величина max I σ i ε j II в силу условия (19) ограничена, то при любом ε ограничен интеграл
Up = ∫ ( ε ij p ε ij p )1/2 dm .
Следовательно, при ε → 0 [20] из последовательности vi ε можно выбрать подпоследовательность, которая слабо* стремится к некоторому пределу в BD ( M ), его можно принять за решение задачи об «обратном течении» сплавов с памятью формы при температуре T 2 .
Разумеется, в предельном состоянии не справедлив вариационный принцип, так как в наиболее важном частном случае σ ij → 0 «пропадают» два первых члена подынтегрального выражения в правой части соотношения (20). Первый закон термодинамики превращается в очевидное равенство, которое описывает одномерное течение, поскольку «запоминается» лишь второй инвариант тензора ε i p j .
Отметим также, что для преобразования условия экстремальности функции Лагранжа к форме (28) требуется доказательство регулярности тензора σ ij и вектора vi . Эта задача исследовалась многими авторами, но еще далека от решения [21].
Список литературы Вариационный принцип для сплошных сред, обладающих памятью формы
- Хачин, В.Н. Никелид титана/В.Н. Хачин, В.Г. Пущин, В.В. Кондратьев. М.: Наука, 1992. 161 с.
- Сплавы с эффектом памяти формы/под ред. Х. Фунакубо. М.: Металлургия, 1990. 221 с.
- Лихачев, В.А. Эффекты памяти формы. Проблемы и перспективы/В.А. Лихачев//Изв. вузов. Физика. 1985. Т. 27, № 5. С. 21-40.
- Brinson, L.C. Simplifications and comparisons of shape memory alloy constitutive models/L.C. Brinson, M.S. Huang//J. Intell. Matl. Syst. and Struct. 1996. V. 7. P. 108-114.
- Abeyaratne, R., A continuum model of thermoelastic solid capable of undergoing phase transformations/R. Abeyaratne, J.K. Knowles//J. Mech. and Phys. of Solids. 1993. V. 41, № 3. P. 541-571.
- McNichols, J.L. Thermodynamics of nitinol/J.L. McNichols, J.S. Cory//J. Appl. Phys. 1987. V. 61, № 3. P. 972-984.
- Панагиотопулос, П. Неравенства в механике и их приложения/П. Панагиотопулос. М.: Мир, 1989. 492 с.
- Найштут, Ю.С. Обобщенные решения в теории течения идеальных упругопластических тел/Ю.С. Найштут//Изв. РАН. МТТ. 1993, № 6. C. 74-78.
- Койтер, В.Т. Общие теоремы теории упругопластических сред/В.Т. Койтер. М.: Изд-во иност. лит., 1961. 79 с.
- Вакуленко, А.А. О связях между напряжениями и деформациями в неупругих средах/А.А. Вакуленко//Исследования по упругости и пластичности. Л.: Изд-во ЛГУ, 1961. Вып. 1. С. 3-35.
- Вакуленко, А.А. О связях между напряжениями и деформациями в изотропных и первоначально изотропных неупругих средах/А.А. Вакуленко//Исследования по упругости и пластичности. Л.: Изд-во ЛГУ, 1963. Вып. 2. С. 3-47.
- Prager, W. Non-isothermal plastic deformation/W. Prager//Proc. Konikl. Nederl. Acad. Wet. 1958. Bd. 61, № 3. P. 176-182.
- Качанов, Л.М. Основы теории пластичности/Л.М. Качанов. М.: Наука, 1969. 420 с.
- Furth, R. Relation between breaking and melting/R. Furth//Nature. 1940. V. 145, № 3680. P. 741-761.
- Raniecki, B. Thermal effects in plasticity/B. Raniecki, A. Sawczuk//ZAMM. 1975. V. 55, H. 6. Pt 1. S. 333-341;
- Raniecki, B. Thermal effects in plasticity/B. Raniecki, A. Sawczuk//ZAMM. 1975. V. 55, H. 7/8. Pt 2. S. 363-373.
- Мосолов, П.П. Механика жесткопластических сред/П.П. Мосолов, В.П. Мясников. М.: Наука, 1981. 208 с.
- Васидзу, К. Вариационные методы в теории упругости и пластичности/К. Васидзу. М.: Мир, 1987. 542 с.
- Лионс, Ж. Некоторые математические проблемы, связанные с механикой деформируемых тел/Ж. Лионс//Механика деформируемых твердых тел. Направления развития/под ред. Г.С. Шапиро. М.: Мир, 1983. С. 8-21.
- Экланд, И. Выпуклый анализ и вариационные проблемы/И. Экланд, Р. Темам. М.: Мир, 1979. 399 с.
- Иосида, К. Функциональный анализ/К. Иосида. М.: Мир, 1967. 624 с.
- Уральцева, Н.Н. О регулярности решений вариационных неравенств/Н.Н. Уральцева//Успехи мат. наук. 1987. Т. 42. Вып. 6 (258). С. 25-174.
