Верификация математических моделей производительности усовершенствованного бункерного загрузочного устройства с радиальными карманами и активным ориентированием для заготовок с торцом в форме усеченного конуса

Автор: Е.В. Пантюхина, А.Л. Бахно, И.В. Пузиков, С.А. Васин
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 2 т.28, 2026 года.
Бесплатный доступ
В статье рассматривается разработанный на основе результатов теоретических исследований макет усовершенствованного универсального бункерного загрузочного устройства с радиальными карманами и активным ориентированием для нескольких типов асимметричных по торцам изделий формы тел вращения. Описаны алгоритм и последовательность разработки натурного макета и этапы проведения экспериментальных исследований для проверки стабильного функционирования устройства при одновременной загрузке двух типов изделий. Представлены разработанные теоретически математические модели вероятности захвата и производительности усовершенствованного устройства для заготовок с торцом в форме усеченного конуса и проведено их сравнения с их экспериментальными зависимостями. Показано в результате верификации и обработки результатов экспериментальных исследований, что разработанные теоретически модели адекватно и корректно описывают процесс захвата и позволяют с высокой для практики точностью оценить значения фактической производительности усовершенствованного устройства.
Верификация математических моделей, вероятность захвата, производительность загрузки, бункерное загрузочное устройство, ориентирование асимметричных заготовок
Короткий адрес: https://sciup.org/148333489
IDR: 148333489 | УДК: 621.9.06 | DOI: 10.37313/1990-5378-2026-28-2-92-98
Verifi cation of Mathematical Feed Rate Models of Improved Hopper Feeder with Radial Pockets and Active Orientation for Frustoconical End Blanks
The article discusses the model of an improved universal hopper feeder with radial pockets and active orientation developed on the basis of theoretical research results for several types of bodies of revolution asymmetric at the ends of products. Algorithm and sequence of development of full-scale model and stages of experimental researches for check of stable functioning of device at simultaneous feeding of two types of items are described. There are presented theoretically developed mathematical models of probability of gripping and feed rate of the improved device for workpieces with frustoconical end and their comparison with their experimental dependencies. It is shown as a result of verification and processing of the results of experimental studies that the theoretically developed models adequately and correctly describe the capture process and make it possible to estimate the actual feed rate of the improved device with high accuracy for practice.
Текст научной статьи Верификация математических моделей производительности усовершенствованного бункерного загрузочного устройства с радиальными карманами и активным ориентированием для заготовок с торцом в форме усеченного конуса
В основе современных направлений проектирования механических дисковых бункерных за-грузочно-ориентирующих устройств (БЗУ), отвечающих требованиям комплексной автоматизации процессов массовых производств, лежит построение теоретических математических моделей вероятности захвата и производительности [1, 2]. Такие модели позволяют описать влияние на вероятность захвата и производительность БЗУ геометрических параметров изделий, конструктивных параметров устройства, окружной скорости органов захвата, коэффициентов трения между изделиями и контактирующими с ними в процессе захвата рабочими органами устройства, коэффициентов трения между изделиями при их взаимосцепляемости [3, 4]. Наличие таких моделей при проектировании позволяет существенно снизить временные и материальные затраты, так как отсутствует потребность в разработке макетов на ранних этапах проектирования для оценки максимальной производительности проектируемого устройства [5]. Все это в совокупности обуславливает необходимость и целесообразность разработки теоретически полученных математических моделей вероятности захвата и производительности.
Построение математических моделей теоретическим способом опирается на комплексный подход, общая концепция которого представлена в работах [6–9]. Многочисленные экспериментальные исследования различных конструкций БЗУ позволили подтвердить адекватность и корректность теоретически разработанных математических моделей и целесообразность их использования при оценке производительности БЗУ на ранних этапах проектирования [10, 11]. Разработка новых БЗУ и математических моделей вероятности захвата в них заготовок при описании производительности и их верификация позволят определить наиболее эффективные условия функционирования усовершенствованных БЗУ.
В работах [12–14] представлено усовершенствованное БЗУ с радиальными карманами, регулируемым кольцевым ориентатором и активным способом ориентирования для изделий формы тел вращения с асимметричным торцом, в котором можно загружать изделия, имеющие различную форму асимметричного торца (в том числе неявную асимметрию). Проведем экспериментальные исследования вероятности захвата и производительности усовершенствованного БЗУ для заготовок с торцом в форме усеченного конуса, теоретически разработанные математические модели вероятности захвата и производительности которого приведены в работе [15].
РАЗРАБОТКА И ОПИСАНИЕ МАКЕТА БУНКЕРНОГО ЗАГРУЗОЧНОГО УСТРОЙСТВА
С РАДИАЛЬНЫМИ КАРМАНАМИ
И АКТИВНЫМ ОРИЕНТИРОВАНИЕМ
Для проведения экспериментальных исследований и проверки стабильного функционирования усовершенствованного БЗУ разработан натурный макет для его комплексного использования для двух типов изделий: однокомпонентного двухсоставного с торцом в форме усеченного конуса и неявной асимметрией формы (рис. 1, а) и многокомпонентного трехсоставно-
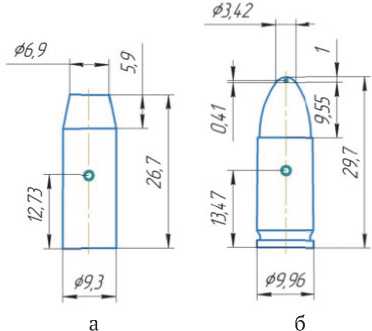
Рис. 1. Схемы ассиметричных изделий формы тел вращения и их размеры (в мм): а – однокомпонентное двухсоставное;
б – двухкомпонентное трехсоставное
го с плавным переходом цилиндрического торца в асимметричный торец (рис. 1, б), представляющий собой усеченный конус и полусферу.
Собранный макет усовершенствованного универсального БЗУ представлен на рис. 2.
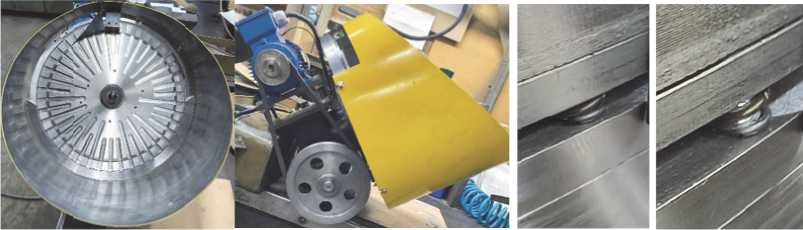

Рис. 2. Макет усовершенствованного устройства для двух изделий
Экспериментальный макет состоит из вращающегося диска с радиальными пазами, кольцевого ориентатора, выполненного из верхнего и нижнего колец, между которых находятся пружины, стянутых винтами. Под вращающимся диском находится неподвижный нижний диск, к которому крепятся обечайка, образующая бункер и копир для переориентирования изделий. В нижнем диске выполнено окно для извлечения сориентированных изделий. Вращение задает электродвигатель, соединенный через редуктор и предохранительную муфту с вращающимся диском устройства. Вращение задает трехфазный асинхронный электродвигатель, мощностью 0,18кВт, частота которого регулируется с помощью частотного преобразователя и предается на диск через ременную передачу и редуктор. Диск вращается по часовой стрелке.
Радиус вращающегося диска R = 0,211 м; угол его наклона ад = 45°. Общее количество радиальных пазов, переходящих в карманы 42. Для увеличения количества карманов пазы выполнены разнодлинными. На диске выполнено 17 пазов длиной 0,137 м и 25 пазов длиной 0,091 м. Всего 42 паза. Высоту радиального паза принимаем приблизительно равной диаметру цилиндрической ча- сти наибольшего изделия hp = 0,009 м. Радиальные пазы переходят в сквозные пазы: высота 0,007 м, длина 0,024 м. Между радиальным пазом и сквозным пазом выполнена кольцевая проточка глубиной 2 мм и шириной 2 мм для копира (переориентирование путем переворачивания асимметричного торца). На рабочей стороне диска выполнен плавный переход от радиальных пазов к сквозным пазам выполнен с помощью фаски. Фаска способствует развороту изделия одним из торцов в сторону кармана под действием силы тяжести, за счет изменяя угла наклона поверхности диска.
Регулируемый кольцевой ориентатор состоит из нижнего кольца и установленного над ним верхнего кольца. с образованием между ними кольцевого паза, поперечное сечение которого соответствует профилю асимметричного торца изделия. В зоне переориентирования в кольцевом ориентаторе выполнен секторный вырез для исключения помех при переориентировании неправильно запавших изделий с помощью копира, поэтому верхнее кольцо выполнено разомкнутым. В нижнем кольце выполнен секторный вырез, который является частью разгрузочного окна.
Кольца стянуты винтами с гайкой, а между колец установлены пружины, такое соединение позволяет регулировать высоту кольцевого паза на определенную величину. При закручивании винтов пружины сжимаются, верхнее кольцо опускается вниз, высота кольцевого паза уменьшается, при откручивании винтов пружины разжимаются – высота профильного паза увеличивается. Благодаря этому расширяются возможности устройства для загрузки изделий одного размерного ряда, отличающихся диаметром в пределах 20…30%. Диапазон регулировки ориентатора от H min = 0,004 м до H max = 0,006 м.
Так как для экспериментов были выбраны два типа изделий, отличающиеся диаметром, длиной и формой асимметричного торца, то кольцевой ориентатор имеет 2 рабочие зоны. Зона 1 предназначена для изделия I, зона 2 – для изделия II. Верхнее кольцо опускается так, что неправильно запавшие изделия упирались большим торцом край диска, а асимметричный торец лежал на краю радиального паза. При правильном западании асимметричным торцом изделие должно упираться в профильную проточку верхнего кольца, при этом между конической частью изделия и верхним кольцом должен оставаться небольшой зазор.
Радиальные карманы образуются сопряжением сквозных пазов вращающегося диска и профильной проточкой кольцевого ориентатора. С использованием разработанных конструктивных ограничений были рассчитаны граничные значения параметров карманов для каждого изделия и принимаем их размеры такими, чтобы устройство обеспечивало захват и ориентирования изделий и I, и II.
Установленный в нижней части бункера над верхним кольцом буртик выполнен в виде половины кольца треугольного сечения со скосами на концах, плотно прилегает к стенке бункера. Бортик необходим для предотвращения накопления изделий на верхнем кольце.
Копир необходим для переориентирования неправильно запавших в карманы изделий. Изготавливался в соответствии с вращением диска по часовой стрелке. Установлен в верхней части бункера, имеет криволинейную форму, которая подбирается эмпирическим путем и дорабатывается во время наладки устройства. В неподвижном диске, к которому крепятся кольцевой ориентатор, обечайка бункера и копир, выполнено разгрузочное окно, через которое ориентированные изделия выпадают в приемник.
ПРОВЕДЕНИЕ ЭКСПЕРИМЕНТВЛЬНЫХ ИССЛЕДОВАНИЙ ВЕРОЯТНОСТИ ЗАХВАТА И ПРОИЗВОДИТЕЛЬНОСТИ НА МАКЕТЕ УСТРОЙСТВА
ДЛЯ ЗАГОТОВОК С ТОРЦОМ В ФОРМЕ УСЕЧЕННОГО КОНУСА
Для проверки стабильной переориентации копиром были выполнены следующие действия. В радиальный карман устройства в нижней части бункера устанавливалось изделие в неправильном положении. При вращении диска изделие перемещалось в зону переориентирования копиром. За- тем изделие подхватывалось копиром, поднималось практически в вертикальное положение, отклонялось чуть в сторону и западало под копир под действием силы тяжести.
Для сопоставления и дальнейшего сравнения теоретических моделей вероятности захвата и производительности с их экспериментальными значениями сначала помощью разработанных программ для заготовки с торцом в форме усеченного конуса и разработанного макета были получены зависимости вероятности захвата и производительности в виде выражений, и их визуализация
(рис. 3):
^ i ПтеО р 'n j ПтеО р
( P i P c P и ) =
60 и 0,029
■ 0,706 ■ (1 - 94,281 -и 4).
Для верификации полученных моделей было определено минимальное количество одинаковых опытов по методике [16]. Эксперимент проводился при двенадцати значениях частоты вращения диска 2; 2,5; 3; 3,5; 4; 4,5; 5; 5,5; 6; 6,5; 7; 7,5, которые с помощью программы были переведены
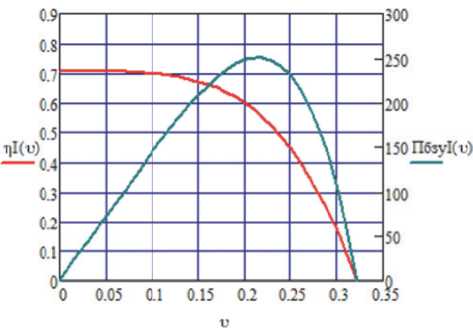
Рис. 3. Визуализация теоретических графиков вероятности захвата и производительности (шт./мин) от окружной скорости (м/с) для заготовки с торцом в форме усеченного конуса
в значения окружной скорости – 0,044; 0,055; 0,066; 0,077; 0,088; 0,099; 0,110; 0,121; 0,133; 0,144; 0,155; 0,166 м/с. Каждое значение было преобразовано в Гц для регулировки частоты на частотном преобразователе. Изделия в бункере при вращении диска поддерживалось на одном уровне (высота уровня изделий в бункере ≈ 2l ), так как при данном уровне производительность устройства с радиальными карманами самая высокая [17]. На каждом значении частоты вращения диска проводилось по 10 экспериментов и подсчитывалось число изделий, выданных из устройства в минуту. Результаты эксперимента обрабатывались по известной методике. Затем средние значения производительности и вероятности захвата были перенесены и обработаны в программе MathCAD. Для удобства подбора коэффициентов выражения (1) были преобразо- ваны и перенесены в программу в виде следующих выражений: П =
60 0,029
• ( P i P c -и- pp^- и 5), то
_~ и пред
есть П =
60 0,029
• (0,706 •и- 94,281 • 0,706 •и 5). Разработанная для аппроксимации программа в авто-
матическом режиме для производительности подбирала коэффициенты, стоящие в скобках перед 54
параметрами υ и υ , а для вероятности захвата – перед параметрами 1 и υ , и визуализировала в виде графиков, которые в дальнейшем были сопоставлены с теоретическими.
Графики, визуализирующие экспериментальные средние значения вероятности захвата и производительности с их аппроксимирующими выражениями от окружной скорости радиальных карманов приведены на рис. 4.
1 «-0.00O1.OJ5
F1W»| J (Мд*
,l(0-Fl«) К! ki-^’J МО» «0 К t-[wj
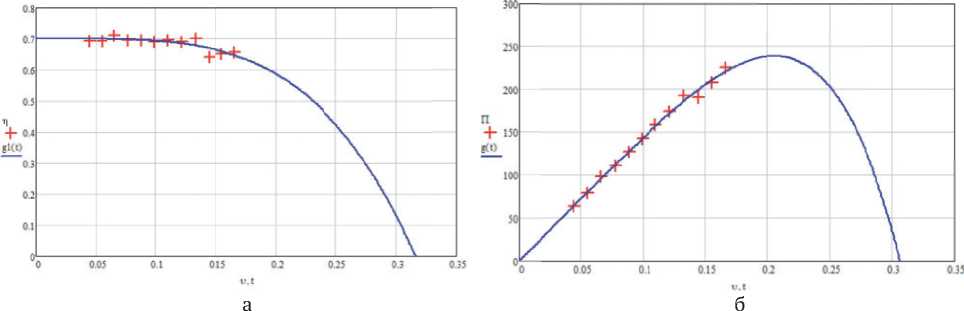
Рис. 4. Визуализация экспериментальных значений вероятности захвата (а) и производительности (б) усовершенствованного устройства и их аппроксимирующей функции от окружной скорости (м/с)
Для визуального сравнения экспериментально полученных зависимостей вероятности захвата и производительности усовершенствованного устройства получены графики, представленные на рис. 5.
Сравнение графиков для каждого изделия показывает практически полное совпадение теоретических и экспериментальных зависимостей вероятности захвата и производительности усовершенствованного устройства с радиальными карманами и регулируемым кольцевым ориентатором от окружной скорости карманов. При расчете отклонений экспериментальных значений вероятности захвата и производительности усовершенствованного устройства от теоретических значений выяснилось, что максимальная разница по фактической производительности составила – 2,27…4,74 %.
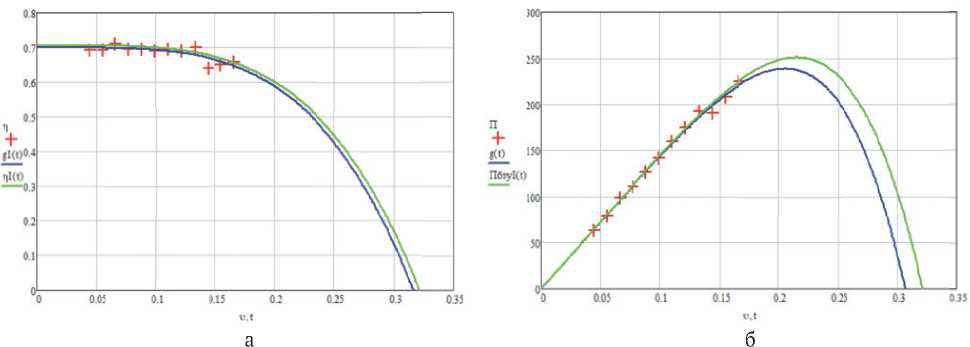
Рис. 5. Визуализация сравнения теоретических и экспериментальных зависимостей вероятности захвата (а) и производительности (б) усовершенствованного устройства от окружной скорости (м/с)
Эти значения получены при максимальных значениях производительности, когда ее колебания максимальны. Наилучшее соответствие теоретических значений и экспериментальных наблюдается в диапазоне окружных скоростей и = 0....0,135 м/с. Это объясняется тем, что, чем ниже окружная скорость карманов, тем меньше колебания вероятности захвата и производительности. То есть при приближении значений окружной скорости к значениям, при которых производительность устройства постоянна, тем данные колебания больше. Это позволяет сделать вывод о том, что математические теоретически полученные зависимости корректно и адекватно описывают взаимосвязанное влияние параметров заготовок и устройства на вероятность захвата и производительность.
ЗАКЛЮЧЕНИЕ
Проведенные экспериментальные исследования разработанном на основе теоретических исследований натурном макете усовершенствованного БЗУ с радиальными карманами, регулируемым кольцевым ориентатором и активным ориентированием асимметричных изделий показали, что в БЗУ обеспечивается регулировка высоты кольцевого паза, что позволило осуществить автоматическую загрузку одновременно двух типов изделий с различными геометрическими параметрами и значениями коэффициентов трения – однокомпонентного двухсоставного и двухкомпонентного трехсоставного.
Максимальная производительность усовершенствованного универсального устройства составляет 219…239 шт./мин при окружных скоростях карманов 0,19…0,21 м/с. Данные значения производительности усовершенствованного устройства позволят обеспечить требуемую производительность современных автоматических роторных линий в массовых производствах, а универсальность усовершенствованного устройства – возможность переналадки под различные типы изделий при выполнении технологических операций. Максимальная вероятность захвата составляет 0,7.
Результаты экспериментальных исследований подтвердили стабильное функционирование натурного макета усовершенствованного БЗУ, возможность его регулировки под различные изделия, повышение производительности устройства по сравнению с ранее известным устройством, у которого было пассивное ориентирование. Это позволяет сделать вывод о том, что математические теоретически разработанные зависимости корректно и адекватно описывают взаимосвязанное влияние параметров заготовок и БЗУ на вероятность захвата и производительность.
