Вероятность сноса оценок параметров межкадровых геометрических деформаций изображений при псевдоградиентном измерении

Автор: Ташлинский Александр Григорьевич, Воронов Илья Васильевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Статья в выпуске: 6-2 т.16, 2014 года.
Бесплатный доступ
В работе рассмотрена методика расчета вероятности сноса оценок параметров межкадровых деформаций, формируемых псевдоградиентными процедурами при оценивании одного и нескольких параметров.
Цифровое изображение, межкадровые деформации, вероятность, снос, псевдоградиентная процедура
Короткий адрес: https://sciup.org/148203595
IDR: 148203595 | УДК: 004.932.4
The probability of shifting the parameters estimation of images interframe geometrical deformations at pseudogradient measurement
In work the method of calculation the probability of shifting the parameters estimation of images interframe deformations formed by pseudogradient procedures at estimation of one and several parameters is considered.
Текст научной статьи Вероятность сноса оценок параметров межкадровых геометрических деформаций изображений при псевдоградиентном измерении
Под псевдоградиентным измерением вектора a неизвестных параметров в работе понимается использование для получения оценки a рекуррентной процедуры вида [1]:
"a -1 + 1 =a t - Л t + 1 P t + 1 ( q ( z , <a t )) , (1)
Для вектора a = ( a 1 , a 2,
. ...
T
, a m ) парамет-
где Р t + 1 ( q ( z , a t )) - псевдоградиент (ПГ) целевой функции (ЦФ) Q , Z - наблюдаемые изображения, для которых требуется оценить параметры a ; Л t + 1 - матрица усиления. В общем случае Р t + 1 ( q ( z , a t )) — это случайное направление в пространстве параметров, определяемое значениями a t и номером итерации t . Это направление будет считаться ПГ ЦФ в точке a пространства параметров, если будет выполнено условие:
[ V Q ( a ) ] T M{ p ( Q ( z , a )) > 0 ,
ров межкадровых геометрических деформаций изображений (МГДИ) соотношение (1) можно представить в виде:
(^ t + 1 =(a t - Л t + 1 ф t + 1 ( v q ( z (1) , z (2) , (^ t ))=a t +^a t + 1
,
где ф t + 1 - некоторая векторная функция от градиента на t -й итерации; Z (1) , Z (2) - наблюдаемые изображения. Для уменьшения вычислительных затрат в выражении (2) допустимо использование вместо V Q ( z (1) , Z (2) , a t ) его усе-
чение
‒
v q ( z t + 1 , а. ) ,
где
то есть, если направление ₽ ( Q ( * ■, a )) в среднем составляет острый угол с направлением вектора градиента V Q (а) функционала Q ( a ) . Применение ПГ алгоритмов в современных системах весьма обоснованно их хорошими точностными характеристиками и устойчивостью к широкому классу помех наряду с вычислительной простотой и отсутствием требования к предварительной оценке параметров исследуемых изображений.
Воронов Илья Васильевич, аспирант
7 — L(1) 7(1) 7(2) ,= y(2) I
z t + 1 = 1 ? ^ e Z , z j e Z } - двумерная локальная выборка ЦФ на t -й итерации. При выборе знаковой функции sgn( ° ) в качестве векторной функции от градиента ф получаем простые и хорошо сходящиеся алгоритмы релейного типа [2, 3] Р t + 1 = sgn (v q ( z t + 1 , a t )) , где sgn( x ) = ( sgn( x 1),...,sgn( X m ) ) T .
Вероятность сноса оценок при измерении одного параметра. Асимптотические вероятностные свойства оценок, сформированных псевдоградиентными процедурами, хорошо изучены. Возможности же анализа вероятностных свойств оценок (X t при конечном числе итераций исследованы недостаточно. Объясняется это большим числом факторов, влиянием которых нельзя пренебречь. К таким факторам можно отнести характер плотности распределения вероятностей (ПРВ) и ковариационную функцию (КФ) изображений, мешающий шум, вид ЦФ Q,
выбор функции ф t преобразования градиента и матрицы усиления Λ t , определяющей величину t -го шага, общее число итераций T и начальное приближение а о вектора а . Эти факторы можно условно разделить на две группы [4]. Первую группу сформируют факторы, которые заданы априорно и не зависят от вида ПГ процедуры. К ним относятся ПРВ и КФ изображений, мешающий шум, а также ЦФ оценивания Q . Во вторую группу войдут факторы, на которые можно воздействовать при использовании ПГ процедур. Сюда можно отнести вид функции ф t , матрицу усиления Л t , начальное приближение а о вектора а и число общее число итераций T . Большой набор влияющих факторов в обеих группах создает сложности анализа эффективности ПГ процедур при конечном числе итераций.
Учитывая то, что в (2) для получения текущей оценки а i , t + 1 предполагается дискретное изменение предыдущей оценки а i , t , в качестве величин, комплексно характеризующих влияние факторов первой группы, предлагается использовать вероятности изменения оценки исследуемых параметров на каждой итерации. Данные вероятности характеризуют переход состояния вектора а параметров из t -го состояния в ( t +1)-е состояние. При этом из-за дискретного изменения оценки а i , t на ( t +1)-й итерации для ПГ процедуры возможны только три события:
- Изменение оценки направлено в сторону истинного значения параметра, тогда:
sgn( S i, t) = sgn Аа i, t+1 , где S i,t = а iu -аi,t, i = 1, m - рассогласование истинного значения параметра аi и его оценки на t-й итерации. При этом направление проекции псевдоградиента на ось параметров а i совпадает с истинным направлением проекции градиента. Вероятность такого события обозначим Р + ( St ) .
̶ Изменение оценки имеет направление от истинного значения:
Sgn( Si,t) = - Sgn Ааi,t+1 .
Вероятность такого события обозначим р i ( S t ) . При этом событии направление проекции псевдоградиента на ось параметров а i противоположно истинному направлению проекции градиента.
̶ Нулевое изменение оценки. Не происходит никакого изменения оценки, при этом Аа i , t = 0. Вероятность такого события обозначим р 0 ( S t ). Очевидно, что вероятности р + ( S t ) , р 0( S t ) и р i ( S t ) составляют полную группу событий:
Р + (St ) + Р - (St ) + Р0(St ) =1
Таким образом, при максимизации ЦФ ПГ процедуры для случая S i , t > 0 , p + ( S t ) - это вероятность того, что на ( t +1)-й итерации проекция псевдоградиента р i на ось параметров а z будет отрицательной:
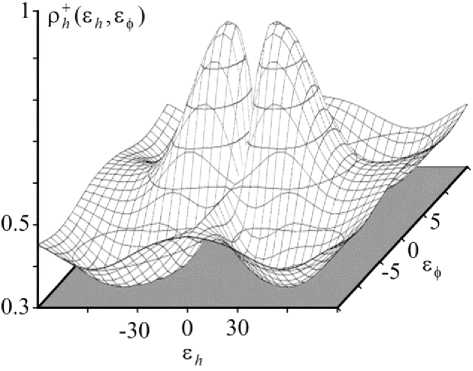
Р +(S,) = P{Pi<0}= 0 w(p,(z -^ где w(вi (Z(1), Z(2), аi,t-1)) - ПРВ проекции рi на ось параметров а i. Для случая минимизации ЦФ р+ (St ) - характеризует вероятность того, что на (t+1)-й итерации проекция псевдоградиента Pz на ось параметров а i окажется положительной: Вероятности р+ (St ) и рi(St ) будем называть вероятностями сноса оценки (ВСО) i параметра аi. Используя плотность распределения вероятности р+ (S) = {Р + ( St ),рi(St ),р0 (St)}несложно получить явные выражения для ПРВ оценок параметров а . В частности, при оценивании параметров изображений для этого удается использовать свойство нормализуемости проекции градиента ЦФ на ось исследуемого параметра при объеме двумерной локальной выборки ЦФ больше двух [5]. В качестве примера на рис. 1 приведены графики функции Рz+ (|St ) для параллельного сдвига при объеме локальной выборки ЦФ ц=1, 3, 5, 10 и 20. Там же показаны экспериментальные результаты, полученные статистическим моделированием по 500 реализациям на имитированных гауссовских изображениях с аналогичными параметрами. Пример имитированного гауссовского изображения, используемого при моделировании, приведен на рис. 2. Анализ показывает хорошее соответствие теоретических и экспериментальных результатов при ц>3. Рис. 1. Вероятность сноса оценки для параллельного сдвига Рис. 2. Пример имитированного изображения Рис. 3. Вероятность сноса оценки сдвига при оценивании двух параметров Если оценки искомых параметров зависимы, например, при оценке сдвига h и угла поворота ф, то величина рh (£h, £ф) при определенном сочетании значений ε может быть и меньше 0,5. Оценки некоторых отдельных параметров в ходе работы ПГ процедуры могут ухудшаться при улучшающихся оценках ЦФ. Пример такого случая приведен на рис. 3. Полученная с помощью ПГ процедуры (2) последовательность оценок a0,al,..., at,..., aT вектора параметров α , является m-мерной марковской цепью. Для релейных алгоритмов элементы матрицы условных вероятностей переходов из состояния l в состояние t легко могут быть выражены через переходные вероятности р+(£t), р 0( £t ) и рi( £t ). В [6] получены выражения для одношаговых ПРВ переходов оценок. Однако при большой размерности вектора параметров α резко возрастает требование к вычислительным ресурсам. Основными факторами, определяющими требования к вычислительным затратам, являются число возможных значений оценки каждого параметра и размерность вектора оцениваемых параметров. Проанализируем возможности уменьшения объемов вычислений для данных факторов. Вероятность сноса оценок при измерении набора параметров. Разобьем область определения Ωα возможных значений параметра a i вектора a на подобласти ®i,k , к = 1, Ki , поставив в соответствие каждой юi,к фиксированное значение ai,к е гоi,к . При этом ai внутри каждой подобласти гоi,к будем считать неизменным. Такой переход от непрерывной области определения Ωα к дискретной позволяет априорно выбрать размеры kπ×kπ, kπ =∑mKi, мат-i=1 рицы пi(t) = ||п(i)к,j(t)| одношаговых переходов, обеспечивающие реализуемость вычислений при заданном классе вычислительных средств. Далее воспользуемся тем обстоятельством, что на t-й итерации из состояния ai,j оценки параметра αi вне зависимости от состояния других оценок, можно перейти только к состояниям ai, к, где к e{j+vi, t + 1, j+vi, t,j,j - vi, t, j - vi, t-1}, vi,t = int (^i,t / ^ i), ^ i - шаг дискретизации области определения параметров αi . Вероятности указанных переходов определяются состоянием оценок других параметров и являются матричными функциями. Каждая подобласть гоi,к, i = 1, m, k = 1, Ki , пространства оценок параметров имеет свои вероятности переходов. Суммируясь, они дают общую вероятность перехода оценки аi из состояния ai, j в состояние ai,к . Так для двух параметров а1 и a 2 общую вероятность улучшения оценки ai = a 1, j на t-м шаге можно выразить как: K1 7 X Р+ = 1 — Z Р2к (t — 1)Р — (^17,82к ) = к=1 , = pT (t - 1)p (8I j , 82 ) где p2к (t-1) = P(а2 = a2к ), к = 1, K2 - вероятность того, что на (t- 1)-й итерации величина а2 имеет значения a 2к; £ i,j = ai, j —a - погрешности оценки. Аналогичные соотношения возможно записать и для большего числа m параметров. Соответственно будет модифицирована матрица одношаговых переходов пi(t) для параметра mm ai, размер которой сократится с 2 Ki х Z Ki i=1 i=1 до Ki х Ki. Однако, указанное сокращение размерности достигается ценой потери информации о вероятности нахождения оценки вектора параметров а на t-й итерации в каждой из подобластей юi. Сохраняются только проекции этого пространственного распределения на оси параметров. Но этого достаточно для решения по- ставленной задачи. Невозможно только однозначно восстановить распределение вероятностей в пространстве параметров. Исследование выполнено при финансовой поддержке государственного задания Минобрнауки России № 2014/232 и гранта РФФИ № 15-41-02087.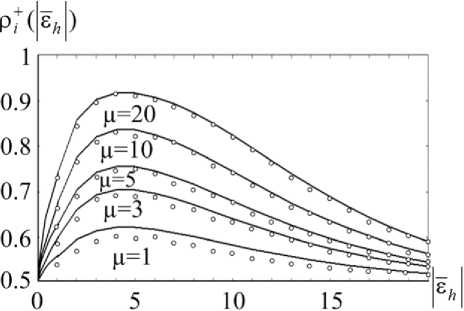
Список литературы Вероятность сноса оценок параметров межкадровых геометрических деформаций изображений при псевдоградиентном измерении
- Цыпкин, Я.З. Информационная теория идентификации. -М.: Наука, Физматлит, 1995. 336 с.
- Ташлинский, А.Г. Псевдоградиентное оценивание пространственных деформаций последовательности изображений//Наукоемкие технологии.2002. Т. 3, № 3. С. 32-43.
- Tashlinskii, A.G. Computational expenditure reduction in pseudo-gradient image parameter estimation//Lecture Notes in Computer Science. 2003. Vol. 2658. P. 456-462.
- Ташлинский, А.Г. Возможности сокращения вычислительных затрат при вероятностном моделировании процесса псевдоградиентного измерения параметров изображений/А.Г. Ташлинский, М.Ю. Самойлов, А.В. Кочкадаев//Вестник Ульяновского государственного технического университета. 2005. № 1 (29). С. 52-53.
- Ташлинский, А.Г. Методика анализа погрешности псевдоградиентного измерения параметров многомерных процессов/А.Г. Ташлинский, В.О. Тихонов//Известия вузов. Радиоэлектроника. 2001. Т. 44, № 9. С. 75-80.
- Ташлинский, А.Г. Методика анализа точности псевдоградиентного оценивания геометрических деформаций последовательности изображений/А.Г. Ташлинский, Г.Л. Минкина, Г.В. Дикарина, В.И. Синицын//Наукоемкие технологии. 2007. Т. 8, № 9. С. 14-23.
