Vibration-protective properties of the suspension with smooth regulation of inelastic resistance in the vibration cycle

Author: Novikov V.V., Chernyshov K.V., Pozdeev A.V., Diakov A.S., Golubchik T.V., Dygalo V.G., Chudakov O.I., Zakirov R.A., Podoshvin D.A.
Section: Краткие сообщения
Article in issue: 3 т.22, 2022.
Free access
Any mechanical vehicle is equipped with a special device to ensure a constant connection between the wheel system and the supporting system. This device is the vehicle's suspension. The suspension of a motor vehicle performs important functions in the operation of the vehicle. The main ones are: mitigating the physical impact on the vehicle. Also, ensuring the accuracy of the steering, which in turn allows you to maintain the desired direction of the wheels. Another important function that the vehicle suspension performs is to stabilize the vehicle while driving, limiting roll. The quality of suspension performance of the above mentioned functions is greatly influenced by its vibration protection properties. Vehicle suspension vibration protection properties are characterized by its elastic and damping components. In order to improve the vibration protection properties, these characteristics must vary according to different vehicle operating conditions. Because of the complex dynamic effects on the vehicle suspension, it is necessary to investigate and develop new methods of forming dynamic load models under different types of road influences. The article presents a mathematical model of a single-mass single-support oscillatory system with two algorithms for smooth regulation of damping in the oscillation cycle. A theoretical comparative analysis of the vibration-protective properties of a single-mass single-support suspension with an adjustable shock absorber is carried out. It has been established that a smooth decrease in resistance in the region of the middle position of the suspension makes it possible to reduce the resonant vibration frequency by more than 2 times in comparison with an unregulated shock absorber and to reduce the range of vertical accelerations of the sprung mass in the resonance zone by 25 % in comparison with the suspension with optimal instantaneous damping control.
Vehicle suspension, vibration-protective properties, mathematical model, single- mass single-support suspensio, adjustable shock absorber, continuously adjustable damping
Short address: https://sciup.org/147239487
IDR: 147239487 | UDC: 629.3.027 | DOI: 10.14529/engin220307
Виброзащитные свойства подвески при плавном регулировании неупругого сопротивления в цикле колебаний
Любое механическое автотранспотное средство (АТС) оснащено специальным устройством для обеспечения постоянной связи между колесной и несущей системой. Этим устройством является подвеска автомобиля. Подвеска АТС выполняет важные функции при эксплуатации автомобиля. Основными из них являются: смягчение физического воздействия на АТС; обеспечение точности рулевого управления, что, в свою очередь, позволяет сохранить нужное направление колес. Еще одной важной функцией, которую выполняет подвеска автомобиля, является стабилизация АТС во время движения, ограничение крена. На качество выполнения вышеперечисленных функций подвески оказывают существенное влияние ее виброзащитные свойства. Виброзащитные свойства подвески АТС характеризуются ее упругими и демпфирующими составляющими. Для улучшения виброзащитных свойств данные характеристики должны меняться в зависимости от различных условий эксплуатации автомобиля. По причине сложного динамического воздействия на подвеску АТС необходимо исследовать и разрабатывать новые методы формирования динамических моделей нагрузки при различном характере дорожных воздействий. В статье приведены математическая модель одномассовой одноопорной колебательной системы с двумя алгоритмами плавного регулирования демпфирования в цикле колебаний. Проведен теоретический сравнительный анализ виброзащитных свойств одномассовой одноопорной подвески с регулируемым амортизатором. Установлено, что плавное уменьшение сопротивления в области среднего положения подвески позволяет снизить резонансную частоту колебаний более чем в 2 раза по сравнению с нерегулируемой амортизатором и уменьшить размахи вертикальных ускорений подрессоренной массы в зарезонансной зоне на 25 % по сравнению с подвеской при оптимальном мгновенном регулировании демпфирования.
Text of the brief report Vibration-protective properties of the suspension with smooth regulation of inelastic resistance in the vibration cycle
A number of works with the participation of the authors of this article [1–20] are devoted to the study of vibration-protective properties of single-mass and two-mass oscillatory systems with instantaneous regulation of damping in the oscillation cycle and the development of designs of adjustable shock absorbers.
These studies have shown that with optimal instantaneous control, damping is always turned off when the suspension passes its static position, and turned on when the moment of maximum compression or extension of the suspension is reached. Such an algorithm for damping control in the oscillation cycle provides a significant decrease in the amplitudes of vertical displacements of the sprung mass, and, consequently, heat generation in the shock absorbers. However, in this case, a decrease in the amplitudes of vertical accelerations occurs in a narrow range of resonant frequencies of vibrations of the sprung mass. In addition, the use of the optimal instantaneous regulation of damping in both dual-mass and single-mass oscillatory systems sets a complex (abrupt) nature of the change in the vertical accelerations of the sprung mass, which is associated with a sharp deactivation of damping in the middle (static) position, which does not contribute to an increase in the smoothness of the vehicle [14, 16].
In order to eliminate jumps in vertical accelerations and reduce their maximum values, the authors of the article proposed an instant (smooth) decrease in the shock absorber resistance in the zone of static position. Below is a theoretical analysis of the vibration-protective properties of a single-mass single-support suspension with two algorithms for smooth regulation of damping in the oscillation cycle considered below (Fig. 1). The mathematical model of this oscillatory system is written by the following differential equation:
mz + uk ( z - q ) + c ( z - q ) = 0 , (1) where m – sprung mass; k – damping factor; c – suspension stiffness; q – coordinate of the disturbing effect; z – movement of the sprung mass; u – parameter for controlling the shock absorber resistance.
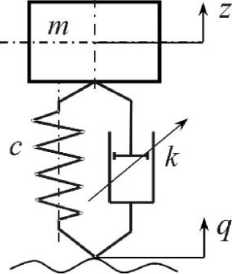
Fig. 1. Design diagram of a single-mass single-support oscillatory system with an adjustable damper
In both algorithms, damping is activated almost instantly when the direction of movement of the shock absorber piston is changed. However, the speed of compression or expansion of the shock absorber in this case increases smoothly from zero, which does not cause a sharp increase in the resistance force, and hence the acceleration of the sprung mass.
In the first algorithm, the inelastic resistance decreases linearly when approaching the neutral (stat- ic) position of the piston by an amount Δ1 and is reset to zero when a static position is reached, which can be described by the following expression for the shock absorber resistance control parameter u: 0 at (z - q) • (z - q) > 0,
u = <
k-ql At
at ( z - q ) • ( z - q ) < 0 и | z - q | < At,
t at ( z - q ) • ( z - q ) < 0 и | z - q | > A1.
In the second algorithm, the resistance decreases linearly with distance from the neutral (static) position of the piston and is reset to zero when the piston distance is reached Δ 2 , which can be described by the following expression for the shock absorber resistance control parameter u :
0 at ( z - q ) • ( z - q ) > 0 и | z - q | > A2,
u = <
t -
t- q A 2
at ( z - q ) • ( z - q ) > 0 и | z - q | < A2,
t at ( z - q ) • ( z - q ) < 0.
-
1. Analysis of the results of theoretical studies of vibration-protective properties of a singlemass single-support suspension with smooth regulation of damping in the vibration cycle
Fig. 2 shows oscillograms of a single-mass oscillatory system with damping control according to algorithm (2), and Fig. 3 shows the corresponding operating diagrams of the suspension with non-instantaneous switching off of damping at a resonance frequency i = 1 and v = 0,92 and at a resonant frequency i = 2 and v = 0,49. Here у - relative attenuation coefficient; i = ш/ш0 — forced vibration relative frequency, ω 0 – natural frequency of sprung mass, ω – frequency of forced vibrations of the sprung mass.
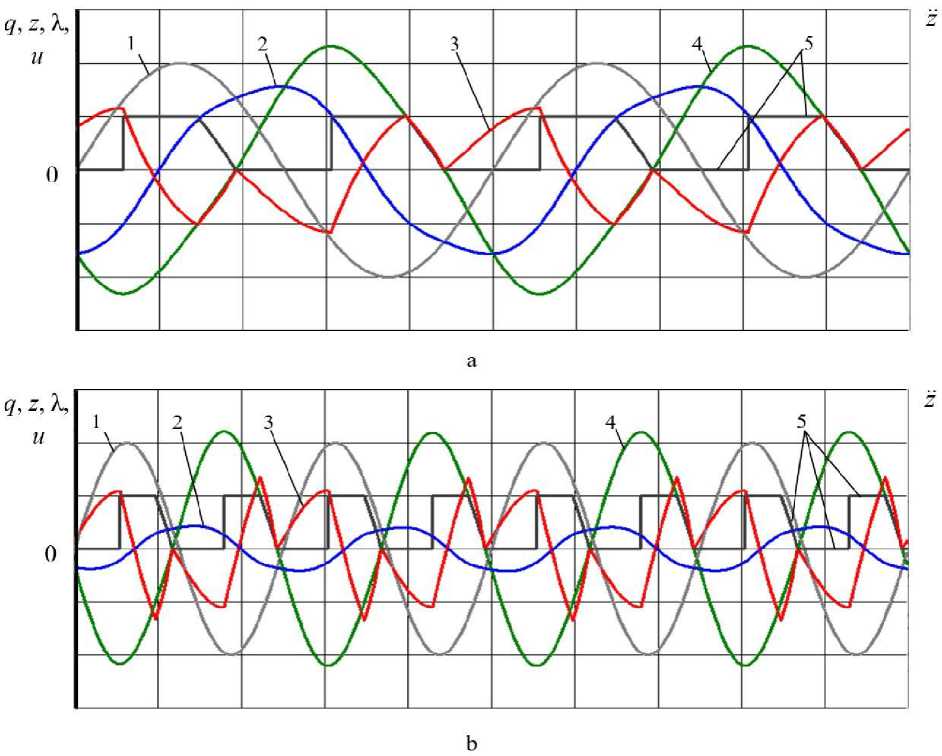
Fig. 2. Oscillograms of the suspension with damping control according to the algorithm (2): a – at ι = 1 and ψ = 0,92; b – at ι = 2 and ψ = 0,49; 1 – kinematic disturbance;
2 – absolute movement of the sprung mass; 3 – sprung acceleration;
4 - relative displacement of the sprung mass (suspension deformation X = z - q );
5 – control parameter u
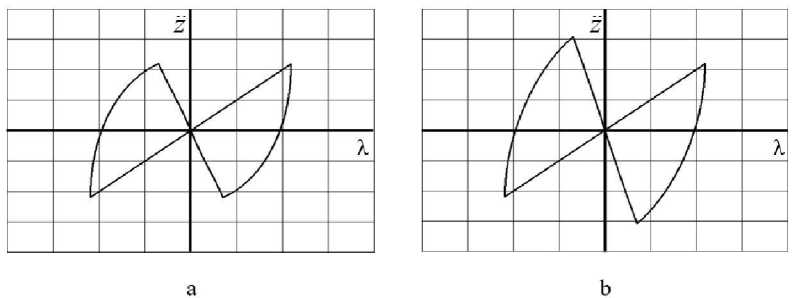
Fig. 3. Working diagrams of the suspension with damping regulation according to the algorithm (2): a – at ι = 1 and ψ = 0,92; b – at ι = 2 and ψ = 0,49 ; λ = z – q
From the analysis of the oscillograms of the vertical accelerations of the sprung mass with non-instantaneous switching off of damping (Fig. 2, curves 3), it can be seen that the accelerations have no discontinuities, and their ranges in comparison with the optimal instantaneous regulation [16] are reduced by about 25 %. From the analysis of the working diagrams in Fig. 3, it can be seen that the heat release in the shock absorber, determined by the area of the “butterfly” loop, increases insignificantly with an increase in frequency by 2 times.
Fig. 4 shows oscillograms of the suspension with damping control according to algorithm (3), and Fig. 5 shows the corresponding operating diagrams of the suspension with non-instantaneous damping control at the resonance frequency i = 1 and v = 0,92 and at a resonant frequency i = 2 and v = 0,49.
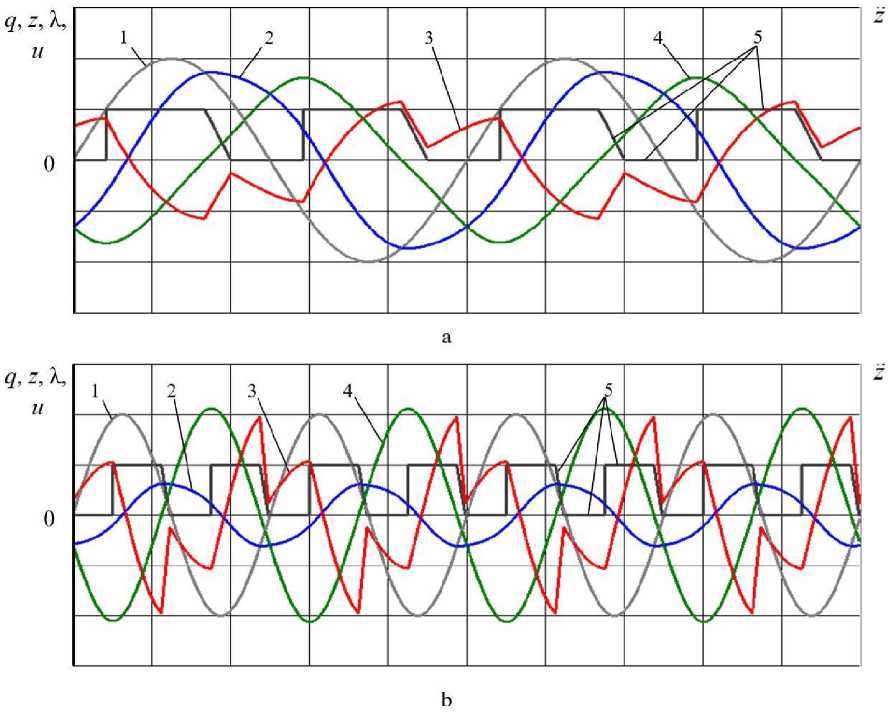
Fig. 4. Oscillograms of the suspension with damping control according to the algorithm (3): a – at ι = 1 and ψ = 0,92; b – at ι = 2 and ψ = 0,49; 1 – kinematic disturbance;
2 – absolute movement of the sprung mass; 3 – sprung acceleration;
4 - relative displacement of the sprung mass (suspension deformation X = z - q );
5 – control parameter u
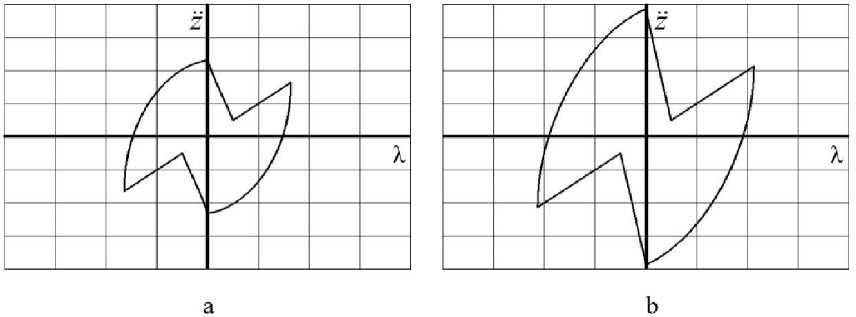
Fig. 5. Working diagrams of the suspension with damping regulation according to the algorithm (3): a - at i = 1 and ф = 0,92; b - at i = 2 and ф = 0,49; X = z - q
Fig. 6 shows the frequency response of displacements and accelerations of the sprung mass on the
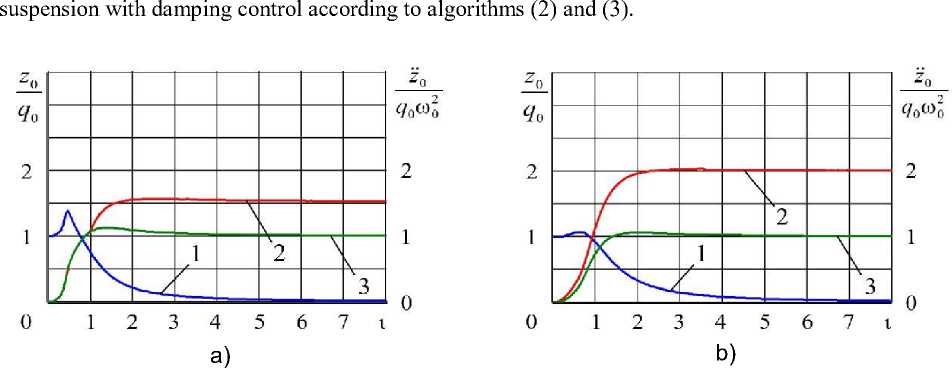
Fig. 6. Frequency response of displacements and accelerations of the sprung mass on the suspension: a) and b) – with damping regulation according to algorithms (2) and (3);
1 and 2 – absolute displacements and accelerations of the sprung mass;
-
3 – relative displacement of the sprung mass;
-
2. Conclusions
z 0 – the amplitude of the absolute oscillations of the sprung mass, q 0 – kinematic disturbance amplitude
From the analysis of the graphs in Fig. 6 it can be seen that both algorithms for regulating the resistance in the oscillation cycle provide a 2-fold reduction in the natural frequency of the suspension and obtain practically non-resonant frequency response of the absolute and relative displacements of the sprung mass with a dynamic coefficient close to or even less than 1, as well as stabilization of the acceleration of the sprung masses in the zone outside the zone. At the same time, the minimum values of accelerations and absolute displacements of the sprung mass in almost the entire frequency range provide non-instantaneous resistance control according to algorithm (2) (curves 2 and 3 in Fig. 6a), and the minimum relative displacements in the low-frequency oscillation zone (before ι = 3) – algorithm (3) (curve 3 in Fig. 6b).
In conclusion, it should be noted that the optimal characteristics of suspension systems with smooth regulation of damping in the oscillation cycle in the entire frequency range are achieved when the maximum inelastic resistance changes according to the same law for all both cases ^(i), close to hyperbole [6]. In comparison with an unregulated shock absorber, the proposed algorithms for smooth cyclic damping control provide a significant reduction in the vibrations of the sprung mass in the entire frequency range. Therefore, it is necessary to search for simple structures that implement non-instantaneous regulation of the inelastic resistance of the suspension in the vibration cycle.
-
1. A smooth decrease in damping in the area of the middle position of the suspension when adjusting the damping according to algorithms (2) and (3) allows to reduce the resonance frequency by 2 times in comparison with an unregulated suspension and to reduce the vertical acceleration of the sprung mass by 25 % in comparison with the suspension with optimal instantaneous damping regulation.
-
2. The minimum values of accelerations and absolute displacements of the sprung mass practically in the entire frequency range provides smooth control of the resistance according to the algorithm (2).
-
3. Minimum relative displacements in the low-frequency vibration zone (up to ι = 3) provides smooth regulation of resistance according to the algorithm (3).
-
3. Acknowledgements
The work is financially supported by the Ministry of Science and Higher Education of the Russian Federation as part of a comprehensive project to create high-tech production “Creation of high-tech production of an unified family of vehicles “Arctic Bus” to organize the safe transportation of passengers and mobile points of the social sphere in the regions of the Far North in conditions of low temperatures
(up to minus 50 °C) to ensure the connectivity of the territories of the Arctic zone of the Russian Federation” under the agreement no. 075-11-2021-058 dated 06/25/2021 (Government Contract ID 000000S407521QLY0002).
References Vibration-protective properties of the suspension with smooth regulation of inelastic resistance in the vibration cycle
- Ryabov I.M., Novikov V.V., Chernyshov K.V., Vasiliev A.V., Osintsev O.V. [Distribution of Energy in the Oscillation Cycle of the ATS Suspension]. Directory. Engineering Journal, 1998, no. 4. pp. 31-33. (in Russ).
- Novikov V.V. [Improving the Efficiency of the Vehicle Suspension]. Tractors and agricultural machines, 2005, vol. 9. pp. 29-32. (in Russ).
- Chernyshov K.V, Ryabov I.M, Novikov V.V. [Optimal Suspension Damping Control Based on the Maximum Principle] Tractors and agricultural machines, 2006, vol. 2. pp 13-15. (in Russ).
- Novikov V.V., Ryabov I.M., Chernyshov K.V. Vibroizolyatsionnyye svoystva podvesok avtotransportnykh sredstv [The vibration isolation properties of the motor vehicles suspensions]. Volgograd, Volgograd State Technical University, 2009. 338 p.
- Dyakov A.S., Pozdeev A.V., Pokhlebin A.V. [Optimal Control of the Stiffness and Damping of the Vehicle Suspension Based on the Maximum Principle of L.S. Pontryagin] Bulletin of the Academy of Military Sciences. 2011. no. 2 (special issue). pp. 132-139. (in Russ).
- Pozdeev A.V., Novikov V.V., Chernyshov K.V., Ryabov I.M. [Synthesis of Algorithms for Optimal Control of Damping and Rigidity of the Vehicle Suspension] Gruzovik, 2011, vol. 6. pp. 2-6. (in Russ).
- Chernyshov K.V., Ryabov I.M., Pozdeev A.V., Pylinskaya T.V. [Analysis of the Principles of Damping Regulation "Skyhook" and "Groundhook" in the Car Suspension] Gruzovik, 2018, vol. 10. pp. 3-6. (in Russ).
- Kotiev G.O., Padalkin B.V., Kartashov A.B., Dyakov A.S. Designs and development of Russian scientific schools in the field of cross-country ground vehicles building. ARPN Journal of Engineering and Applied Sciences. 2017. vol. 12. no 4. pp. 1064-1071.
- Diakov A.S., Pozdeev A.V., Lyashenko M.V., Moskovskii I.V. Experimental studies of the snowmobile engine rubber-metal vibration dampers specifications. IOP Conf. Series: Materials Science and Engineering, 2020. vol. 709 , iss. 3. Art. no. 044001. DOI: 10.1088/1757-899X/709/4/044001.
- Dygalo V.G., Zhukov I.S., Diakov A.S., Chutkov K.A. Experimental evaluation of the effect of cryogenic treatment of brake discs of the vehicle on the performance characteristics. IOP Conference Series: Materials Science and Engineering. 2020. vol. 820, iss. 1. Art. no. 012004. DOI: 10.1088/1757-899X/820/1/012004.
- Jalili N., Esmailzadeh E. Optimum active vehicle suspensions with actuator time delay. Journal of Dynamic Systems, Measurement and Control, 2001, vol. 123, no. 1, pp. 54-61.
- Sun L. Optimum design of «road-friendly» vehicle suspension systems subjected to rough pavement surfaces. Applied Mathematical Modeling, 2002, no. 26, pp. 635-652. DOI:10.1016/S0307-904X(01)00079-8
- Panchal A.B., Gadit J.J., Mistry N.G., Vaghela N.M. Development of Active Suspension System for Car Using Fuzzy Logic Controller, PID and Genetically Optimize PID controller, Journal of Information, Knowledge and Research in Electrical Engineering, 2013, vol. e 02, iss. 02. pp. 347-351.
- Zhao Y.G., Chen J. Co-simulation on semi-active suspension of vehicles. Noise and Vibration Control, 2011, vol. 31, no. 5, pp. 104-107.
- Chai L., Sun T., Feng J. Design of the LQG controller for active suspension system based on analytic hierarchy process, Automotive Engineering, 2010, vol. 32, no. 8, pp. 712-718.
- Zhou R., Guo Z. Research on active suspension control technology, Journal of Tongji University, 2012, vol. 197, pp. 176-180.
- Liu D., Tang Y., Gu H.Y. The development of automotive active suspension control system, Hydraulics Pneumatics & Seals, 2010, vol. 5, no. 4, pp. 21-25.
- 18.Yoshimura T., Takagi A. Pneumatic active suspension system for a one-wheel car model using fuzzy reasoning and a disturbance observer. JZhejiang Univ Sci, 2004, vol. 5(9), pp. 1060-1068.
- Fenchea M. Influence of Car's Suspension in the Vehicle Comfort and Active Safety. Annals of the University of Oradea, Fascicle of Management and Technology Engineering. 2008. vol. VII (XVII). pp.250-253.
- Weeks D.A., Beno J.H., Guenin A.M., Breise D.A. Electromechanical Active Suspension Demonstration for Off Road Vehicles, SAE Technical Paper Series. 2000, vol. 01, no. 0102.
