Виброробот для вертикального движения по металлической шероховатой поверхности

Автор: Яцун С.Ф., Локтионова О.Г., Черепанов А.А., Рублев С.Б.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Современные технологии в промышленности и строительстве
Статья в выпуске: 4-3 т.12, 2010 года.
Бесплатный доступ
Разработана математическая модель движения вибрационного робота по вертикальной металлической поверхности за счет переменного прижатия корпуса к поверхности с помощью электромагнита и вращения встроенных дебалансных масс. Представлена конструктивная схема и результаты моделирования.
Виброробот, математическая модель, мобильный объект, периодическое движение, магнитный привод
Короткий адрес: https://sciup.org/148199448
IDR: 148199448 | УДК: 621.864.8
Vibrating robot for vertical movement on a metal rough surface
The mathematical model of the vibrating robot movement on a vertical metal surface due to variable pressing the case to a surface by means of an electromagnet and twirl built in debalamce weights is de-veloped. The constructive scheme and results of modelling is presented.
Текст научной статьи Виброробот для вертикального движения по металлической шероховатой поверхности
-
1. Описание вибрационной мобильной системы. Робот двигается под действием силы трения, возникающей на контакте корпуса и металлической шероховатой поверхности. Управление величиной и направлением силы трения осуществляется за счет вращения деба-лансных внутренних масс и переменного усилия прижатия корпуса к шероховатой металлической поверхности.
-
2. Математическая модель движения робота. Дебалансы будем считать материальными точками, расположенными в центре масс дебалансов, а корпус робота рассматриваем как материальную точку. Массы дебалансов равны. Робот движется в системе координат XOY. На механическую систему наложены связи:
Ф 1 = П - Ф 2
x = 0
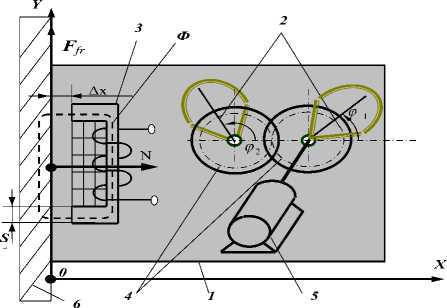
Рис. 1. Схема робота: корпус 1, дебалансы 2, электромагнит 3, зубчатые колеса с передаточным отношением 1 (синхронизатора) 4, электродвигатель постоянного тока 5
Для составления математической модели применим уравнения Лагранжа-Максвелла, система уравнений будет состоять их 2 уравнений электрических цепей (m=2) и 2 уравнений, описывающих механическую часть системы (n=2) [5]:
--•----1--•—
. dt a q* M d qM д ^ м
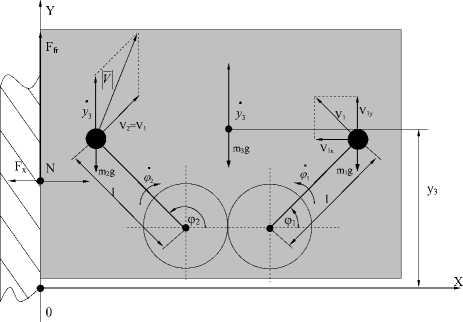
Рис. 2. Расчетная схема робота
Для определения диссипативной функции, кинетической и потенциальной энергии рассмотрим расчетную схему механической части робота, приведенную на рис.2. Выражение для кинетической энергии будет иметь вид:
Определим функции входящие в систему уравнений (2). Функцию Лагранжа (L) будем искать как сумму кинетической, потенциальной и магнитной энергии
• 2
• • • m • y
T I У з J + Т я I Ф 1 J + Т д Ы = 2 +
. (5)
I L JЯ 'Ф1
J 2
+ т ^Г y 3 J
••
•
L = TK I y 3 I + Тд I ф 1 I + Тя I ф 1 I П К ( y 3 ) ПД ( ф 1 ) + WМД ( I Я ) + WMM I M )
•
•
•
+ 2 • y 3 -| р 11 1 cos ( p ) + | р 1
(3) Диссипативная функция механической системы:
где Тк I yз I; Тд I ф1 I; Тя I ф1 I -кинетическая энергия корпуса, дебалансов и вала двигателя; пк (yз); Пд (р) - потенциальная энергия корпуса и дебалансов; WM^(Iя) - магнитная энергия двигателя; WMM (Iм) - магнитная энергия в воз- душном зазоре электромагнита.
Диссипативная функция ( Т ) будет иметь вид:
••
Т = Т м | у 3 | + Т м Ф 1 + Т e ( I Я ) + Т e ( I m )
V ) V ) . (4)
• • где Тм I y 3 I; Тм I ф1 J - диссипативные функции корпуса и дебалансов; Тe(1 я )5 Тe(IM ) - диссипативные функции двигателя и электромаг- нита.
•
У м I y 3
м
Ф 1
A y 3 у 3 + А ф 1 Ф 1
где A y 3, Аф 1 - значение вязкости.
Потенциальная энергия механической системы:
П(У 3)+ П(Ф1) = m 3 g- У 3 + 2 m1 g(У 3 +1 - §ь(Ф1))
. (7)
Для вращения дебалансов используется двигатель постоянного тока, тогда
L I 2 • L q*2
W МД ( I Я ) = 112 Я + L 12 I Я Ч с + 22 2 с - магнитная энергия двигателя, L 11 и L 22 – коэффициенты самоиндукции соответственно подвижного и неподвижного контуров; L 12 – коэффициент взаимной индукции контуров, J я – момент
• инерции вала двигателя, qс - ток в цепи статора. L12 зависит от ориентации ротора и статора, т.е. от обобщенной координаты φ1, следовательно L12= L12(φ1).
Диссипативная функция для двигателя:
W e ( I я ) =
.
В качестве магнитного привода предлагается использовать П-образный электромагнит. Энергию магнитного поля в воздушном зазоре электромагнита определим по формуле:
Для дифференциального уравнения описывающего движение по обобщенной координате y 3 непотенциальной силой является сила трения, которая представлена кусочнонепрерывной моделью:
- к- N - sign ( у 3 ),
w
ММ
Ф2 - A x
2 - д 0 - 5 - z2
Q y 3 = F TP = ‘ FPД ,
- К - N - sign ( FPД ),
-
у 3 ^ 0;
-
У 3 = 0,| F pg ^ к >- N ;
-
У 3 = 0,|F pд | > К о - N .
где Ф – магнитный поток, возникающий в магнитном контуре сердечника, д 0 - магнитная проницаемость, S – площадь воздушного зазора , z - число витков проводника с током, A x - зазор между металлической поверхностью и электромагнитом.
Диссипативная функция электромагнита:
Т М ( I М ) = ~ R M ' I М
2 .(9)
Функции L и Т будут иметь вид:
• 2
L = m 3 - у 3
+ m1

+ 2 у 3 -| ф 1 l 1 cos ^ ) +[ фхl
-
• 2
. Jя ■ ф . ( . , • ( w Ф2-Ax,
+ — mз g- Уз - 2mi g(Уз + l- <ф))+ т
-
2 2 - д - 5 - z
•
+ L ^ + L 12 1 Я q c + L 2 q
• •
= Д у 3 У 32 + Цф Х ф 2 + R M -1М 2 + К я I я 2
' 2 2 2 2 . (11)
где F РД – проекция на ось Y равнодействующей всех сил, приложенных к конструкции робота, кроме силы сухого трения, κ – коэффициент трения скольжения, κ 0 – коэффициент трения покоя, N – реакция опоры, равная тяговому усилию развиваемому электромагнитом.
Для П-образного электромагнита непотенциальную силу, действующую на корпус со стороны электромагнита, будем рассчитывать по формуле [6]:
Ф 2
2 - д 0 - 5 - z2
Тогда нормальная реакция опоры представлена в следующем виде:
N = F x
Ф 2
2 д 0 - 5 - z2
Продифференцируем полученные функции L (9), ψ (10) по соответствующим координатам получим систему дифференциальных уравнений, описывающих поведение электромеханической системы:
••
Ф 1 =
-
•• •
2 - у 3 - m i - 1 - cos ( ф 1 ) - д i - ф 1 - 2 m i - g - 1 - cos ( ф 1 ) + k m I я
< • ^ 2 •
-
•• 2 - m 1 - ф 1 I - 1 - sin ( ф 1 )- Д у 3 - у 3
у 3 =--------------------------------------,
••
2 - m 1 -1 ф ' 1 I - 1 - cos ( ф ' 1 ) - m 3 g - 2 m 1 g + FTP
( m 3 + 2 - m 1 )
• Ф-Nx
Ф = Uм ( t ) - RM--- Д 0 - 5 - z
I Я
U я ( t ) - Rя1 я - kE ф 1 LЯ
Для решения системы (15) применялся метод численного интегрирования Верле [7]. Напряжение U М ( t ) будем моделировать следующим образом:
U м ( t ) = U 1 +

если sin( ® - t + a ) > 0 если sin( ^ t + a ) < 0
графика ускорения на рис. 4 видно, что в начальный момент времени на систему воздействуют большие значения ускорений. Увеличим и совместим графики ускорения корпуса и угловое ускорение вала двигателя. Полученные зависимости приведены на рис. 5.
где U 1 – постоянная составляющая напряже-
ния, подаваемого на электромагнит.
Напряжение в цепи статора двигателя имеет постоянную фиксированную величину U Я ( t ) = const и соответствует величине, при
которой частота вращения вала равна частоте периодической составляющей напряжения пи-• \ тания электромагнита ® = I Ф1 I ,
V 7 ср
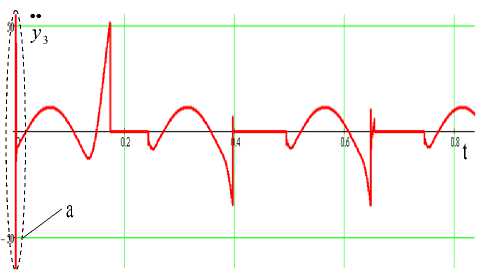
Рис. 4. График ускорения корпуса робота
Для моделирования выбраны следующие значения параметров электромеханической системы: k =0,7, ω=25 1/c, m 1 =0,1 кг , m 3 =0,1 кг,
| н I l=0,05 м, цф=1 нм/с, цу=1 V м^с J, z=1000, Δx=0,001 м, S=0,0001 м2, ψ=π, RМ = 30 Ом, RЯ=0,8 Ом, Kω=1,3 нм/А, Kε=0,68 В/с, UЯ (t) = 32,5 В, U1=0 В. Начальные условия
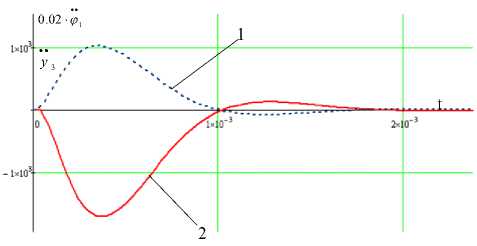
Рис. 5. Увеличенные, в области переходного процесса, участки графиков углового ускорения дебалансов и ускорения корпуса (1 – угло-
для моделирования поведения электромеханической системы:
у з = 0; у з = 0; у з = 0; ф i = 0;
^9 1 = 0; ф 1 = 0; Ф = 0; Ф = 0
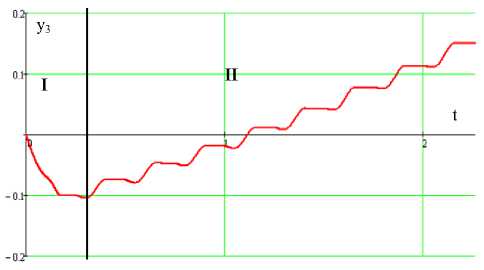
Рис. 3. График перемещения корпуса робота по вертикальной поверхности
вое ускорение дебалансов 0,02 • ф 1 ,2 - уско-
• • рение корпуса робота y 3 )
Как показывают графики, соскальзывание корпуса с вертикальной поверхности вызвано разгоном двигателя до требуемого частоты вращения и вследствие этого большими
значениями
касательно
силы
инерции
, входящей в систему урав-
Начальное движение системы начинается с соскальзывания, данный участок графика расположен в области ( I ) и характеризует переходный процесс, происходящий в системе. Дальнейшее движение корпуса робота происходит в области ( II ) и носит характер установившего движения вертикально вверх. На участке (а)
нений (15).
Установившийся режим движения робота (рис. 6) состоит из 3 фаз. Во время фазы движения T 1 корпус робота покоиться на одном месте, происходит остановка. Далее при T 2 мобильный объект соскальзывает вниз, силы трения недостаточно, для того, чтобы скомпенсировать равнодействующую силу, приложенную к корпусу. При T 3 мобильный робот поднимается вверх под действием усилия, развиваемого дебалансами.
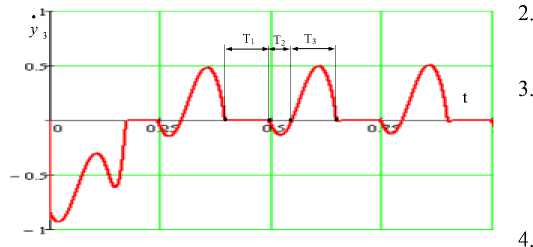
Рис. 6. График скорости корпуса робота
Работа выполнена в рамках ФЦП «Научные и научно- 5. педагогические кадры инновационной России на 20092013 г.» Госконтракт №П621 от 18.05.2010г и при поддержке РФФИ проект №10-08-00769. 6.
Список литературы Виброробот для вертикального движения по металлической шероховатой поверхности
- Болотник, Н.Н. Динамика управляемых движений вибрационных систем/Н.Н. Болотник, И.М. Зейдис, К. Циммерман, С.Ф. Яцун//Изв. РАН. ТиСУ. 2006. №5. С. 1-11.
- Черноусько, Ф.Л. О движении тела, содержащего подвижную внутреннюю массу//ДАН. 2005. Т. 405, № 1. С. 1-5.
- Vartholomeos, P. Dynamics, Design and Simulation of Novel Microrobotic Platform Employing vibration Microactuators/P. Vartholomeos, E. Papadopoulos//Journal of Dynamics System, Measurement and Control. March 2006. Vol. 128. Pp. 122-133.
- Jatsun, S. Modelling of Robots Motion by Use of Vibration of Internal Masses/S. Jatsun, V. Dyshenko, A. Yatsun, A. Malchikov//Proceedings of EUCOMES 08. Pp. 267-274.
- Мартыненко, Ю.Г. Аналитическая динамика электромеханических систем//МЭИ. 1984. С. 62.
- Сливинская, А.Г. Электромагниты и постоянные магниты//Энергия, 1972. С. 102.
- Verlet, L. Computer experiments on classical fluids. I. Thermodynamic properties of Lennard-Jones molecules. Phys. Rev. 1967. V. 159. P.98-103.
