Визуализация движения мехатронно-модульного робота

Автор: Герасин Павел Владимирович, Редько Юлия Сергеевна, Мартынов Владимир Васильевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Краткие сообщения
Статья в выпуске: 5 (56) т.11, 2011 года.
Бесплатный доступ
Проанализированы актуальность и сфера применения модульных роботов, состоящих из однотипных модулей. Разработана кинематическая модель и на ее основе составлена программа визуализации движения одного из таких роботов. Полученные результаты могут быть использованы при отработке системы интеллектуального управления движением таких роботов.
Мехатроника, модульные роботы, кинематическая модель, визуализация движения, экстремальная робототехника
Короткий адрес: https://sciup.org/14249614
IDR: 14249614 | УДК: 621.865.8
Mechatronic-modular robot movement visualization
The urgency and application of the single-type modular robots is considered. The kinematical model-based program of such robot movement visualization is worked out. The obtained results can be used for the development of the intelligent manipulation of the robot movement.
Текст научной статьи Визуализация движения мехатронно-модульного робота
Введение. Разработка модульных роботов (МР) с адаптивной кинематической структурой в настоящее время является одним из перспективных направлений мехатроники. МР состоят из однотипных модулей, объединенных в единую многозвенную конструкцию, а соединение таких модулей позволяет создавать различные по структуре механизмы. По сравнению с обычными мобильными роботами МР обладают серьезными преимуществами, среди которых надежность и способность преодолевать сложные препятствия. В МР используются новейшие достижения робототехники, мехатроники, теории управления (в том числе интеллектуальное управление движением). Одна из основных областей применения МР – экстремальная робототехника [1]. К сожалению, в литературе практически отсутствует информация о внутренней структуре, алгоритмах и программном обеспечении, используемых для управления перемещением и реконфигурацией таких роботов. Из отечественных работ следует упомянуть статью [2], в которой рассмотрено движение одномерного МР по плоской поверхности.
Разработка кинематической схемы и программа визуализации. Нами исследована визуализация волнообразного взаимного смещения модулей МР, приводящего к его продольному пере- мещению. Приняты следующие допущения и ограничения: все модули имеют одинаковые геомет-
Рис.1. Стадии цикла одного перемещения МР
рические размеры; каждый из модулей состоит из головного и хвостового звеньев одинаковой длины и бесконечной жесткости; звенья соединены безлюфтовым шарниром с одной степенью подвижности, допускающим их взаимный поворот на угол ±(π–γ). Угол γ определяется конструктивными ограничениями используемых в модулях МР шарниров. Начало неподвижной декартовой системы координат связано с начальным положением «кончика хвоста» первого модуля. Направление оси OX совпадает с направлением движения МР. Ось OY повернута относительно оси OX на угол π/2 против часовой стрелки (на рис.1 оси координат не показаны). Звенья каждого модуля условно обозначены отрезками прямых: черными – для голов- ного, т.е. первого по направлению движения МР, белыми – для хвостового звеньев (см. рис.1, на котором показана последовательность прохождения волны по длине модуля). Номера модулей обозначены цифрами у соответствующих шарниров. Звенья каждого i-го модуля образуют между собой углы αi, где i – порядковый номер модуля, начиная с крайнего левого.
На примере МР, состоящего из n =5 последовательно соединенных модулей, составлена кинематическая модель. Анализ кинематики движения МР позволил составить уравнения, описывающие изменения углов при вершинах модулей в зависимости от времени. Обозначив длину одного звена модуля через l , запишем выражение для максимально допустимого перем ещения МР за один цикл движения как Δ x max = 2 l (2 - 2(1 - cos γ )) (величина Δ x max ограничивается параметром γ ). Угол α i , при котором будет обеспечено заданное перемещение ∆ х (например, при вершине модуля 2 на рис.1, стадия б ), составит:
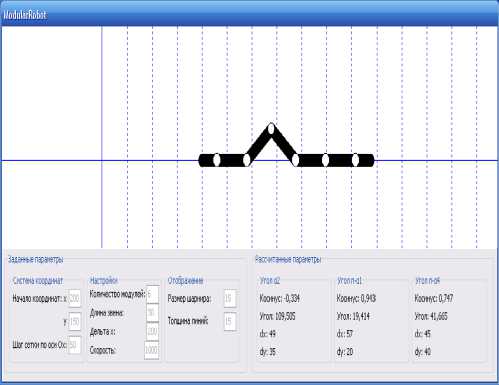
Рис.2. Интерфейс программы «ModularRobot»
8l∆x-8l2-(∆x)2 α = arccos.
При прохождении волны по длине робота угол при шарнире модуля 2 проходит через значение α 2 =π
(см. рис.1, стадия в), которому соответствуют значения углов при шарнирах 1 и 4: 48l2 -12l∆x+ (∆x)2 α = arccos
-
1 8 l ( ∆ x - 6 l )
α 4 = arccos
24 l 2 - 12 l ∆ x + ( ∆ x )2 4 l ∆ x - 24 l 2
Перемещение МР обеспечивается за счет последовательного воспроизведения повторяющихся движений всеми модулями МР как элементами кинематической цепи, в результате чего от первого модуля к последнему «пробегает» волна и весь МР продвигается вперед на расстояние Δ x . Задачей системы управления перемещением робота является согласованная отработка углов в шарнирах модулей. На основе кинематической модели разработана программа «ModularRobot» (рис.2), позволяющая визуализировать перемещение МР при последовательном выполнении движений каждым звеном, что в дальнейшем будет использовано при отработке интеллектуальной системы управления движением таких роботов. Визуализация может быть реализована в любом назначенном оператором масштабе времени.
Заключение. В результате проведенных исследований разработана кинематическая модель многозвенного модульного робота и программа визуализации его движения. Полученные результаты могут быть использованы при разработке интеллектуальной системы управления движением и реконфигурацией модульных роботов в условиях неопределенности внешней среды.
Список литературы Визуализация движения мехатронно-модульного робота
- Роботы и робототехника. [Электрон. ресурс]. -Режим доступа: http://insiderobot.blogspot.com.
- Макаров И.М. Алгоритмы управления движением многозвенных мехатpонно-модульных роботов с адаптивной кинематической структурой/И.М. Макаров [и др.]//Мехатроника, автоматизация, управление. -2008. -№3. -С.2-9.
