Влияние алгоритма включения блокировочного фрикциона на управляемость быстроходной гусеничной машины при повороте на месте

Автор: Харлапанов Дмитрий Васильевич, Кондаков Сергей Владимирович, Перевозчиков Юрий Анатольевич
Рубрика: Краткие сообщения
Статья в выпуске: 2 т.13, 2013 года.
Бесплатный доступ
Приведены результаты имитационного моделирования поворота быстроходной гусеничной машины на месте с использованием блокировочного фрикциона гидрообъемной передачи для предотвращения ее перегрузки по давлению.
Быстроходная гусеничная машина, поворот на месте, гидрообъемная передача, курсовой угол, блокировочный фрикцион, алгоритм управления
Короткий адрес: https://sciup.org/147151628
IDR: 147151628 | УДК: 629.114.2
Influence of engage algorithm of blocking clutch on turning round controllability of high-speed caterpillar machine
Results of imitating modeling of turning round of high-speed caterpillar machine with use of blocking friction clutch of hydrostatic transmission for prevention of its overload.
Текст краткого сообщения Влияние алгоритма включения блокировочного фрикциона на управляемость быстроходной гусеничной машины при повороте на месте
Быстроходные гусеничные машины (БГМ), в том числе БМП-3, оснащаются гидрообъемны-ми передачами (ГОП), которые предназначены для совершения бесступенчатого поворота с различными радиусами. При попытке разворота на месте БГМ возникает перегрузка ГОП, что значительно ограничивает возможности маневрирования и приводит к потере управляемости; к замедлению входа в поворот на месте; к низкой средней скорости установившегося поворота; к невозможности совершения полного разворота на месте; к ограничению разворота на месте в зависимости от типа грунта [1].
Эти ограничения связаны с мощностью ГОП, реализация которой по полнопоточной схеме приводит к росту массы и габаритов, что невозможно в имеющихся габаритах моторнотрансмиссионного отделения БМП-3. По этой причине необходимо найти такие схемные решения, которые бы обеспечили высокие характеристики всех показателей: диапазона непрерывного изменения передаточных отношений, КПД, массы и объема. Авторами в работе [2] предложен метод снятия ограничений применением блокировочного фрикциона (БФ), работающего параллельно ГОП. Работа БФ основывается на показаниях четырех датчиков – скорости поворота штурвала управления поворотом; интенсивности нарастания давления в магистралях нагнетания и всасывания; углового ускорения корпуса машины. Показания датчиков в безразмерной форме суммируются и при превышении полученной суммой определенного заранее предела формируется сигнал на включение БФ.
В качестве объекта исследований выбрана БМП-3, кинематическая схема которой приведена на рис. 1. Выбор БМП-3 обусловлен тем, что в ней реализована наиболее современная схема с ГОП в механизме поворота (МП) и для нее остро стоит вопрос модернизации и повышения управляемости.
Для разрешения сложившихся ограничений управляемости разработана новая кинематическая схема (рис. 2), где в качестве помощника ГОП использован БФ МП.
На рис. 2 изображена кинематическая схема с БФ, помогающим ГОП. Для оценки новой схемы проведено исследование управляемости БГМ при различных алгоритмах управления БФ или бортовым тормозом (БТ) механизма поворота [2, 3].
Как известно, изменение направления движения влияет на распределение нагрузки в ГОП и БФ и, следовательно, на все агрегаты трансмиссии.
Расчетные исследования проведены методом имитационного моделирования поворота на месте с помощью пакета программ в среде программирования VisSim.
Проведение имитационных испытаний работоспособности новых алгоритмов включения БФ или БТ, приведенных в работе авторов [2], предполагает выполнение последовательности следующих этапов:
-
• определение коэффициентов усиления по каждому из 4 фиксированных параметров в безразмерной форме и предельного значения суммы этих параметров;
-
• определение параметров МП при входе в поворот на месте и движении по радиусу, равному колее машины, как без помощи БФ или БТ, так и при их совместной работе;
-
• проведение анализа графиков давления ГОП и времени входа в поворот с целью оценки управляемости БГМ.
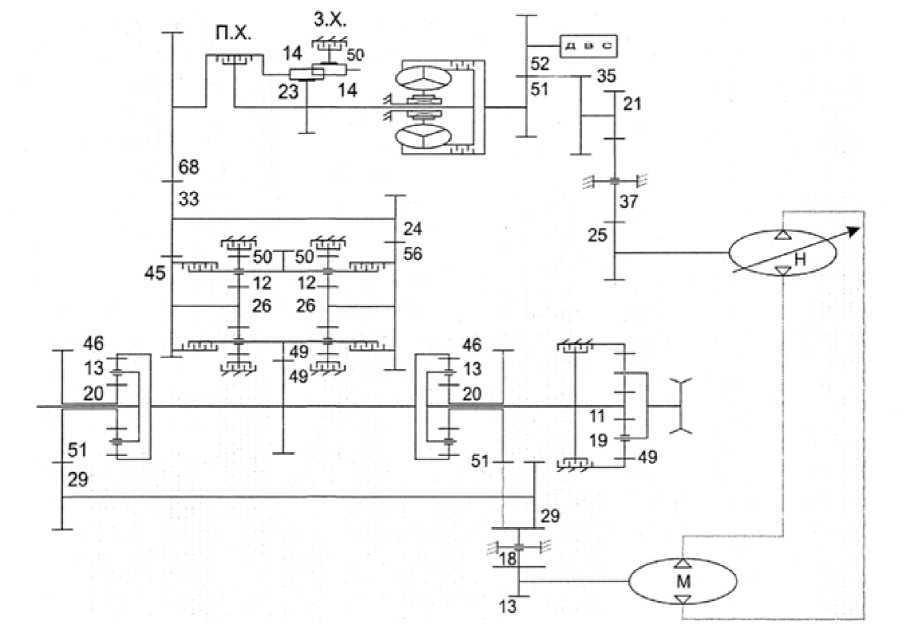
Рис. 1. Кинематическая схема БМП-3: ДВС – двигатель внутреннего сгорания, З.Х. – задний ход, П.Х. – передний ход, Н – насос ГОП, М – мотор ГОП
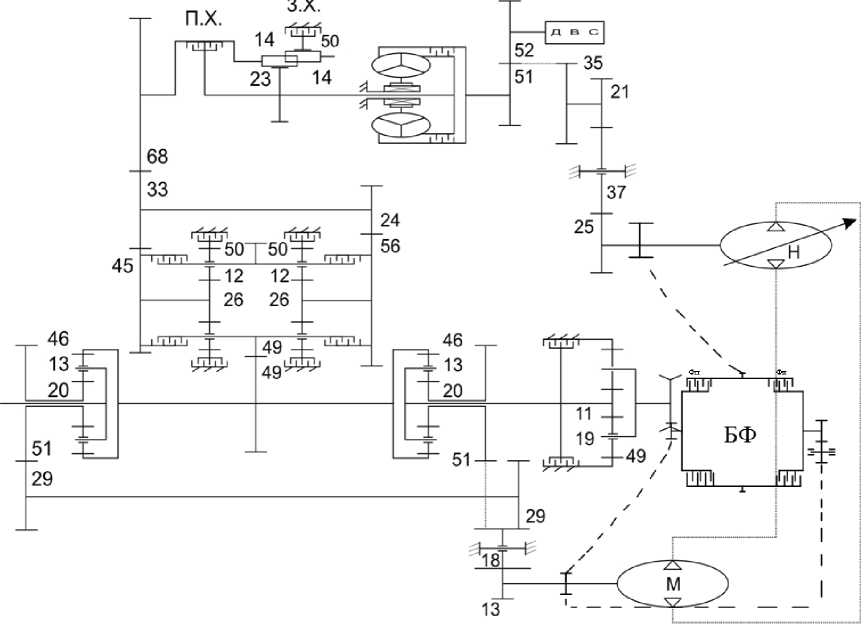
Рис. 2. Кинематическая схема БМП-3 с БФ в МП: БФ – блокировочный фрикцион
Краткие сообщения
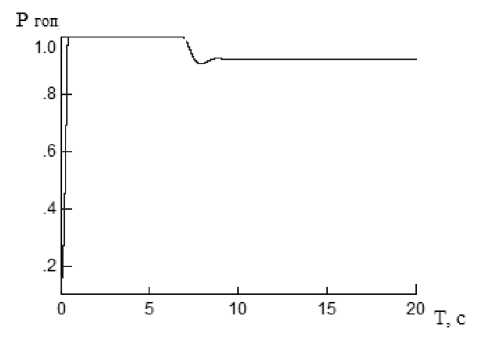
Исследования показали, что без помощи вспомогательных систем ГОП за все время своей работы перегружается как при входе в поворот, так и в движении по заданной траектории. Расчет схемы со штатной трансмиссией БМП-3 при повороте на месте показал, что ГОП перегружается в течение 6,5 с (рис. 3, а). Это влияет на радиус траектории движения, который не равен колее машины и не обеспечивает заданный радиус. Время разворота на 360° в поворот соста-вило10,5 с.
а)
Рис. 3: а – относительное давление ГОП; б – траектория движения
б)
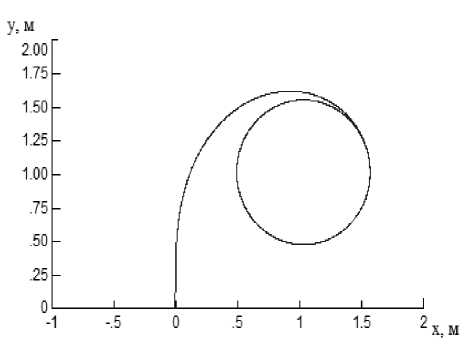
Влияние нового алгоритма на поворот БГМ на месте представлено на рис. 4: снижается продолжительность работы ГОП на клапане до 0,2 с, (а в некоторых случаях и вовсе удается избежать перегрузки по давлению). Время разворота на 360° снижается до 9,6 с. Характер и значение давления в установившемся повороте при этом не изменяются. Обеспечивается заданный штурвалом радиус траектории движения, равный колее машины – 1,3 м (см. рис. 4, б).
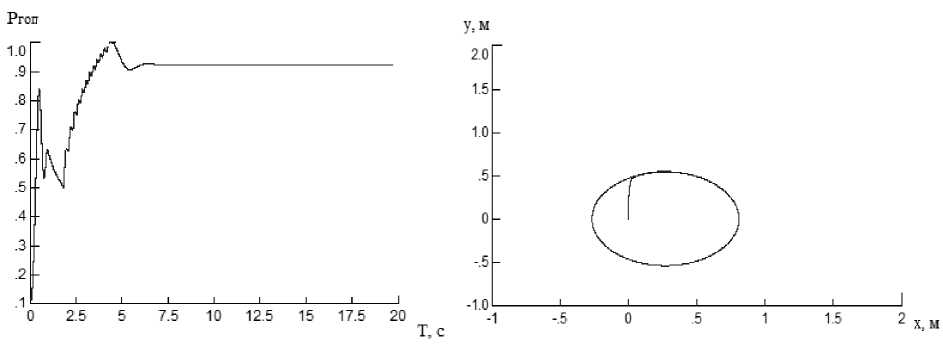
Рис. 4: а – относительное давление ГОП; б – траектория движения
Предлагаемые схемные технические решения и алгоритмы управления позволяют обеспечить адекватное поведение БГМ при повороте на месте и в более тяжелых дорожных условиях (при увеличении сопротивления грунта).
Выводы
-
1. БМП-3 имеет ряд ограничений возможности разворота на месте: превышение давления в нагнетательной магистрали ГОП, как следствие, невозможность безусловного совершения заданного маневра; длительное время входа в поворот; невозможность маневра в тяжелых дорожногрунтовых условиях.
-
2. Применение схемы трансмиссии с ГОП и БФ в МП, а также разработанный алгоритм управления БФ по сумме показаний четырёх датчиков позволяют избежать ограничений управляемости.
-
3. Введение управляемых БФ дает возможность оптимизации режимов работы трансмиссии совместно с ГОП при маневрировании БГМ.
-
4. В результате математического моделирования и проведения расчетных исследований удалось доказать, что время работы ГОП при перегрузке по давлению снижается с 6,5 до 0,2 с, а время входа в поворот на месте с 10,5 до 9,6 с.
Список литературы Влияние алгоритма включения блокировочного фрикциона на управляемость быстроходной гусеничной машины при повороте на месте
- Военные гусеничные машины: учеб. для вузов. В 4 т. Т. 1. Кн. 1: Устройство/под ред. Э.К. Потемкина. -М.: Изд-во МГТУ им. Н. Э. Баумана, 1990. -380 с.
- Кондаков, С. В. Оптимизация алгоритма включения фрикциона блокировки гидрообъемной передачи дифференциального механизма поворота быстроходной гусеничной машины/С.В. Кондаков, Д.В. Харлапанов//Вестник ЮУрГУ. Сер. «Машиностроение». -2011. -Вып. 18. -№ 31 (248). -С. 68-76.
- Харлапанов, Д.В. Исследование совместной работы автоматических систем управления гидрообъемной передачей и блокировочного фрикциона механизма поворота быстроходной гусеничной машины/Д.В. Харлапанов//Вестник ЮУрГУ. Сер. «Машиностроение». -2012. -Вып. 20. -№ 33 (292). -С. 89-96.
