Влияние пропускной способности регулируемых пересечений на количество выхлопных газов от автотранспорта

Автор: Шепелев Владимир Дмитриевич, Глушков Александр Иванович, Фадина Ольга Сергеевна, Кутузова Виталина Евгеньевна
Рубрика: Логистика и управление транспортными системами
Статья в выпуске: 1 т.17, 2023 года.
Бесплатный доступ
Возможность отслеживать состояние отдельных участков дорог в городской среде с целью более эффективного управления дорожными заторами становится все более важной. В настоящее время разрабатываются сложные системы управления дорожным движением, способные обрабатывать данные как статических, так и мобильных датчиков и предоставлять информацию о дорожном движении для сети дорог. В дополнение к типичным данным о дорожном движении, таким как поток, плотность и средняя скорость движения, в настоящее время наблюдается большой интерес к экологическим факторам, таким как парниковые газы, выбросы загрязняющих веществ и расход топлива. В данной работе предложен мониторинг с использованием обзорных камер уличного видеонаблюдения с применением сверточных нейронных сетей. Тестирование системы в различных условиях показало абсолютную процентную точность обнаружения и классификации транспортных средств, не менее 92 %. В результате исследования выявлены наиболее значимые факторы, управляя которыми можно эффективно влиять на пропускную способность полосы движения. Предложена методика расчета времени разъезда очереди внегрупповых транспортных средств и исследовано влияние ускорения на пропускную способность, которое позволит снизить вероятность появления заторных ситуаций на регулируемых перекрестках. Проведены исследования влияния скорости проезда автотранспортом узлов улично-дорожной сети (УДС) на количество выбросов загрязняющих веществ в атмосферу.
Нейронные сети, пропускная способность перекрестка, поток насыщения, ускорение, выбросы вредных веществ
Короткий адрес: https://sciup.org/147240311
IDR: 147240311 | УДК: 656.02 | DOI: 10.14529/em230116
Influence of the capacity of regulated crossings on the quantity of exhaust gases from vehicles
The ability to monitor the condition of individual road sections in the urban environment in order to manage traffic congestion more effectively is becoming increasingly important. At present, complex traffic management systems are being developed that can process data from both static and mobile sensors and provide traffic information for the road network. In addition to typical traffic data such as traffic flow, density and average speed, there is currently a great interest in environmental factors such as greenhouse gases, pollutant emissions and fuel consumption. In this work, monitoring using surveillance cameras of street surveillance with the help of convolutional neural networks is proposed. Testing of the system under various conditions showed an absolute percentage accuracy of detection and classification of vehicles, at least 92 %. As a result of the research, the most significant factors have been identified, by controlling which it is possible to effectively influence the traffic lane capacity. A method for calculating the time of passing-by of the queue of non-group vehicles is proposed and the effect of acceleration on throughput is investigated, which will reduce the likelihood of congestion at regulated intersections. Studies have been conducted on the influence of the speed of passage by motor vehicles of the nodes of the road network on the amount of emissions of pollutants into the atmosphere.
Текст научной статьи Влияние пропускной способности регулируемых пересечений на количество выхлопных газов от автотранспорта
За последнее десятилетие в целом по России наблюдается тенденция к урбанизации, плотность населения в городах значительно увеличивается. Высокие темпы роста автомобильного парка стали причиной увеличения дорожно-транспортных происшествий, возникновения заторных ситуаций на городских дорогах, ухудшения экологической ситуации в городах и, как следствие, роста психологической нагрузки на человека и снижения качества жизни населения в целом.
Одним из решений данных проблем является внедрение интеллектуальных транспортных систем (ИТС) для управления дорожно-транспортным комплексом, что позволяет не только обеспечить безопасность дорожного движения, но повысить и пропускную способность улично-дорожной сети (УДС) городских агломераций.
Принятие решений по организации и совершенствованию дорожного движения (ДД), оценка эффективности функционирования УДС возможны только на основании изучения параметров транспортного потока (ТП) и зависимостей между ними в конкретных условиях [1–5].
Исследования ТП сосредоточены на взаимодействии между различными участниками дорожного движения (ТС, водители, пешеходы и велосипедисты) и инфраструктурой (автомагистрали, устройствами контроля сигналов) с целью выявления взаимосвязи между отдельными участниками дорожного движения и результирующим ТП.
Важнейшим критерием, характеризующим функционирование ТП, является пропускная способность (ПС). Под последним понимается максимальное количество транспортных средств (ТС), которые способно пересечь сечение дороги за единицу времени. Пропускная способность ограничивается не только физическим пространством, но и временем, отводимым для движения [5–10].
Пропускная способность регулируемых перекрестков определяется с использованием понятия «поток насыщения» – главной характеристикой в процессе анализа, проектирования и расчета узлов УДС [7–11]. Поток насыщения является показателем, зависящим от многих факторов: ширины полосы движения, продольного уклона, состояния покрытия дорожного полотна и т. п. Поэтому для каждого перекрёстка (даже в различное время суток и сезона) поток насыщения рассчитывается экспериментально. Такая методика требует существенных затрат времени и не применима для проектирования новых перекрёстков. Еще одним существенным недостатком является то, что данная методика не учитывает стохастический характер ТП и наличие ТС перед перекрестком, которые не успели его покинуть в предыдущий разрешающий такт работы светофора [11–13].
Поэтому цель данной работы – разработка методик с использованием ИТС, позволяющая решить следующие задачи:
-
1. Мониторинг транспортных потоков с использованием обзорных камер уличного видеонаблюдения и применением сверточных нейронных сетей.
-
2. Выявление наиболее значимых факторов, влияющих на пропускную способность регулируемых узлов.
-
3. Установление взаимосвязи между параметрами ТП и количеством выбросов вредных веществ (ВВ) в атмосферу от автотранспорта на регулируемых перекрестках.
Мониторинг параметров транспортных потоков в режиме реального времени
Существующие решения по адаптивным настройкам светофорного регулирования основаны на использовании дорожных камер или данных с ГЛОНАСС/GPS. Дорожные камеры расположены над проезжей частью и имеют ограниченный угол обзора, что не позволяет получать достаточно данных о динамических и количественных параметрах, прибывающих ТС (рис. 1, 2) [14].

Рис. 1. Дорожная камера, установленная над проезжей частью в городе

Рис. 2. Угол обзора с дорожной камеры, установленной в г. Челябинск на пересечении ул. Артиллерийская и ул. Первой Пятилетки [15]
Подход с использованием данных с ГЛОНАСС/GPS имеет ряд недостатков, таких как задержка в передаче данных и невысокая точность позиционирования, что не позволяет оценить ТП по полосам движения.
Для задач мониторинга ТП были использованы обзорные камеры уличного видеонаблюдения с применением сверточных нейронных сетей.
Для обнаружения и классификации ТС использована архитектура нейронной сети YOLOv4 и трекера с открытым исходным кодом (SORT) (рис. 3) [14].
В процессе обучения нейронной сети было размечено более 26 000 изображений. Для работы в сложных метеоусловиях (снег, дождь, туман и т. д.) проведена аугментация исходных изображений, что позволило сформировать dataset в размере 26,7 млн единиц ТС. Данное решение позволяет поддерживать стабильную точность работы системы при снижении видимости в ночное время и вызванной неблагоприятными погодными условиями.
Для камер с различным углом обзора был применен метод перспективного преобразования координат с исходного изображения к географическим координатам. Данный подход позволяет определять динамические габариты ТС на глубине участка дорог до 500 м. Тестирование системы в различных условиях показало абсолютную процентную точность обнаружения и классификации ТС не менее 92 %. Погрешность определения скорости ТС методом проекции с учетом калибровки камеры не превысила 1,5 км/ч [14].
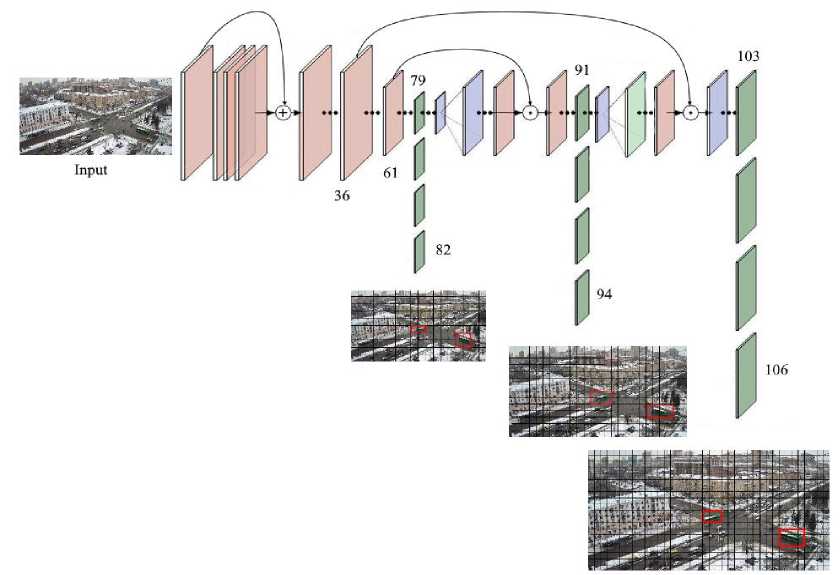
Рис. 3. Архитектура сверточной нейронной сети YOLOv4
Фрагмент работы глубоко обученной нейронной сети по сбору и обработке данных на основе видеопотоков одного из самых загруженных перекрестков Челябинска представлен на рис. 4 [15].
Методика расчета времени разъезда очереди внегрупповых транспортных средств
Время, которое необходимо для того, чтобы некоторое количество внегрупповых ТС (определяется в режиме реального времени с помощью видеонаблюдения) пересекло стоп-линию, зависит от состава данной очереди. Ускорение, необходимое для разгона с начальной скорости (равной нулю) для каждого ТС, определяется исходя из той позиции, которую оно занимает в очереди [4].
Динамический габарит ТС при нахождении в неподвижном ТП определяется:
D i - l i + ' о , (1) где D i - динамический габарит i -го ТС (м); l i -длина i -го ТС (м); 1 0 - средняя дистанция между ТС, стоящими в очереди (м).
Таким образом, время, необходимое для разъезда очереди внегрупповых ТС ( tsl ), рассчитыва- ется как сумма промежутков времени всех ТС в очереди, за которые они пересекут сечение стоп-линии:
12 - ( 1,5 + D .( « г -- 1 ) ) aisl
где 1,5 - средняя дистанция от первого стоящего в очереди ТС до сечения стоп-линии (м); D i - динамический габарит i -го ТС (м); n i - порядковый номер в очереди i -го ТС (м); ass - ускорение i -го ТС (м/с2).
Наблюдения за процессом пересечения ТС стоп-линии показали, что в зависимости от позиции в очереди, ускорение для каждого ТС, даже в случае, когда все ТС - легковые автомобили, зна- чительно различаются. Поэтому важно определить, какого типа ТС и какую позицию в очереди оно занимает.
Методика расчета пропускной способности перекрестка по направлению только прямо с учетом очереди внегрупповых ТС
В городских условиях ТП движется на разных скоростях по различным участкам УДС. Расстояние между движущимися ТС колеблется в достаточно большом диапазоне, что сказывается на плотности потока. Минимально безопасное расстояние между ТС рассчитывают [2-5]:
v di - Ч " tr + —, (3)
где d i - минимально безопасное расстояние для i -го ТС (м); v i - скорость i -го ТС (м/с); t r - время реакции водителя (с).
Динамический габарит ТС при движении в потоке на скорости рассчитывается:
Di = di + li,(4)
где l i - длина i -го ТС (м).
Интенсивность движения ТП рассчитывается:
Qv - D ■
Пропускная способность полосы при длительности разрешающего такта ( t 0) определяется:
N,,- П+ 7Т-(' о-2'''),(6)
Di где Nvi - пропускная способность полосы прямо при скорости ТП vi.
Пропускная способность полосы зависит от количества и типа ТС в очереди и значения скорости пачки подъезжающих ТС к стоп-линии, а также длительности продолжительности разрешающего такта светофора.

Рис. 4. Обнаружение и отслеживание ТС сверточной нейронной сетью YOLOv4
Исследование влияния ускорения ТС на стоп-линии
В ходе анализа результатов экспериментального исследования процесса пересечения очереди ТС стоп-линии на разрешающий сигнал светофорного объекта (СО) было обнаружено, что в зависимости от позиции в очереди каждое ТС начинало движение с различным ускорением. На рис. 5 отчетливо видно, что с максимальным ускорением сечение стоп-линии пересекали 2, 3 и 4-е ТС, остальные ТС пересекали с одинаковым ускорением, так как с момента включения разрешающего сигнала светофора они уже начали движение.
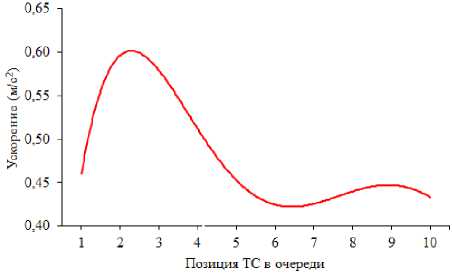
Рис. 5. Изменение ускорения ТС в очереди в зависимости от их позиции при достижении стоп-линии
Влияние на время достижения стоп-линии ТС при разных подходах к измерению ускорения отражено на рис. 6, где видно, что при принятом в общих методиках для расчетов различных параметров ТП принимается среднее ускорение 1,5 м/с2 [2-4]. Так, 10-е ТС в очереди пересечет стоп-линию после включения разрешающего сигнала светофора на 11-й секунде, что не соответствует действительности, так как каждое ТС проезжает сечение стоп-линии каждую секунду. Также недостатком методик, основанных на статистических данных, является очень существенный момент - в них не учитывается тип ТС в очереди. Известно, что различные типы ТС значительно различаются по техническим характеристикам.
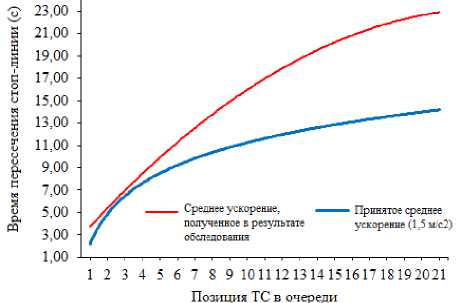
Рис. 6. Среднее время движения ТС в очереди до стоп-линии при разном ускорении
Время проезда перекрестка зависит от многих факторов, в том числе и от ускорения на каждом участке УДС. Для корректности расчетов по проектированию цикла регулирования на каждом пересечении необходим глубокий анализ данной характеристики. В случае некачественного дорожного покрытия или наличия таких помех, как трамвайные линии, ускорение ТС на таком узле УДС будет очень отличаться от такого же по геометрическим характеристикам пересечения без помех и хорошим качеством дорожного покрытия.
При исследовании параметров узлов УДС в г. Челябинске было выявлено, что расстояние от стоп-линии до дальней границы конфликтующего направления на различных перекрестках варьируется от 30 до 60 м.
Из рис. 7 видно, что время пересечения ТС не подвержено сильным колебаниям. Так, изучаемый участок УДС в 30 м ТС преодолевает за 4,7 с, а 60 м - 6,7, то есть при увеличении расстояния в 2 раза время увеличивается всего на 43 %.
После того, как ТП покинул дальнюю границу конфликтующих направлений (ДГКН), происходит нарастание скорости до крейсерской (максимально возможной по Правилам ДД, в городских условиях она ограничена 60 км/ч). Тут важно рассчитать, за какое время и на каком расстоянии лидер-ТС достигнет максимальной скорости. Ориентир на лидер-ТС в потоке объясняется тем, что при начале движения еще на стоп-линии это ТС формирует так называемую пачку ТС, которые за ним следуют. А пачка не имела возможности распасться, так как ее движение происходило на пересечении конфликтующих направлений.
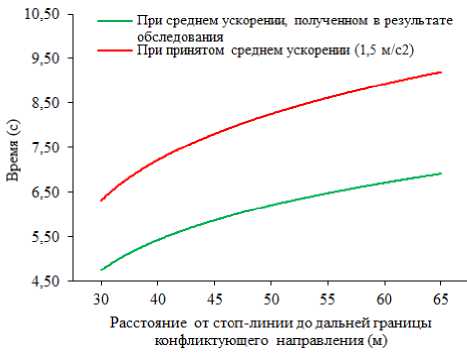
Рис. 7. Среднее время проезда перекрестка лидирующим ТС
Рассмотрим влияние величины ускорения на время достижения ТС крейсерской скорости (рис. 8). Так, если величина ускорения небольшая (1-1,5 м/с2), то времени для разгона ТС необходимо 13-16 с. При высоком ускорении (более 2-2,5 м/с2) времени на достижение крейсерской скорости необходимо около 7 с, то есть в 2 раза меньше. Мож- но сделать вывод, что показатель ускорения ТС на каждом участке УДС имеет большое значение и влияет на общие характеристики ТП в целом.
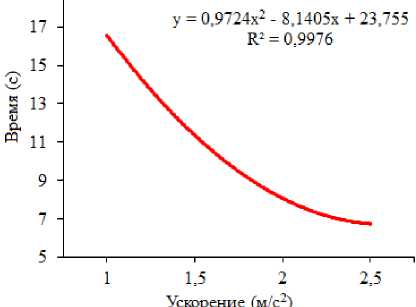
Рис. 8. Зависимость времени достижения крейсерской скорости лидирующим ТС от ускорения
Исследование влияния параметров ТП на выбросы загрязняющих веществ от ТС
Загрязняющие вещества, выделяемые транс- портными средствами, являются основным источником загрязнения воздуха в городах [16–23]. Мониторинг и анализ выбросов от транспортных потоков становится все более важным для того, чтобы лучше управлять состоянием атмосферного воздуха. Разрабатываются сложные системы управления дорожным движением, способные обрабатывать как статические, так и данные мобильных датчиков, которые предоставляют информацию о дорожном движении для сети дорог. В дополнение к типич- ным данным о дорожном движении, таким как по- ток, плотность и средняя скорость движения, в настоящее время наблюдается большой интерес к экологическим факторам, таким как выбросы пар- никовых газов и загрязняющих веществ в результате дорожного движения [24, 25]. Наиболее популярными моделями для исследования выбросов загрязняющих веществ в городах являются: COPERT IV и PHEM v11 [23, 26, 27].
Методики расчётов выбросов загрязняющих веществ на данный момент в России регламенти- рованы следующими документами:
-
- приказ Минприроды России № 804 от 27.11.2019 г. [28];
-
- национальный стандарт РФ ГОСТ Р 56162-2019 [29].
На основании этих нормативных документов, выбросы от движущихся ТС M Li (г/с) определяются по формуле:
M ^^Ml i • G k ( G kn ) r v , (7)
где L - протяжённость участка автодороги (км); M L - табулированный удельный пробеговый выброс i-го загрязняющего вещества к-й группы транспортного средства (г/км); Gk - фактическая интенсивность движения для каждой из k групп транспортных средств за единицу времени (20 минут); Gkn - количество транспортных средств каждой из к групп, находящихся в «пробке» в течение 20 минут; k - количество групп транспортных средств; rv - поправочный коэффициент, учитывающий зависимость изменения количества ВВ от средней скорости движения ТП, представленный на рис. 9 (при скорости ТС до 60 км/ч).
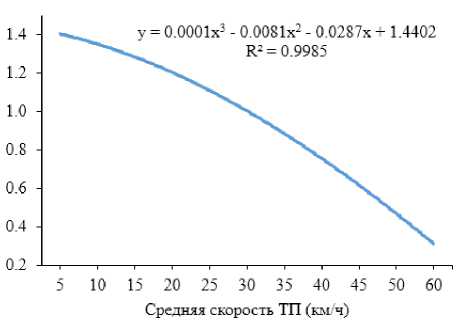
Рис. 9. Зависимость поправочного коэффициента от скорости движения ТС
Для данной постановки исследования общую формулу определения количества выбросов MLV на длине перекрёстка ( L 0) от однородно движущегося потока ТС с произвольной скоростью V ( t ), можно определить на основании уравнения (7):
t 1
M LV = J I - Z 1 МЬ • G k I - r v \V (t ) ] dt =
0 V 1200 2
t 1
= C о - J r v \_ V ( t ) ] dt , (8)
где rv[V(t)] - поправочный коэффициент, определяемый произвольной скоростью V(t) движения автотранспортного потока; С0 - константа, характеризующая структуру и интенсивность ТП; t1 - время пересечения перекрёстка длиной L0 транспортным потоком с произвольной скоростью V(t).
Аналитический вид для rV в зависимости от произвольной скорости движения транспортного потока получен по наиболее простому уравнению тренда с максимальным уровнем достоверности аппроксимации 99,9 % (см. рис. 9):
r v \_ V ( t ) ] dt = b - V ( t ) 3 - b 2 - V ( t ) 2 + bY - V ( t ) + b o . (9)
В общем случае неравномерного движения транспортного потока на длине перекрёстка L 0 количество выбросов загрязняющих веществ M LV определяется по формуле (8) с учётом (9) - зависимости поправочного коэффициента r V от скорости ТП.
Для таких расчётов необходимо фиксировать в реальном масштабе времени не только интенсивность и структуру ТП, но и его мгновенные скорости на всём интервале времени пересечения перекрёстка, что представляет практически неразрешимую задачу. Поэтому рассмотрены два основных варианта - равномерное движение и равноускоренное движение ТС в районе перекрёстка.
Исследование равномерного движения ТС
Для постоянной скорости движения ТП формула (8) принимает вид:
Mlv = Со • rvо • Ч, (10) где rv0 - поправочный коэффициент (см. рис. 9) при известном значении скорости; t1 = ( L0 / V0) -время проезда перекрёстка длиной L0 транспорт- ным потоком.
Целесообразно принять за базовое значение выбросов загрязняющих веществ значение выбро- сов от транспортного потока при rV0, равном единице, что соответствует скорости V0 = 30 км/ч.
Тогда сравнительный коэффициент выбросов при произвольной постоянной скорости ТП и базовой скорости в 30 км/ч - KVi /30 - будет определяться с учётом аналитической зависимости (9):
C • • L Kv = —vi-^ 30 C ■ r3o • tзо r ■• L0 vi V
L r, • 0
30 30
vi r30 Vi
...
= £ • ( b 3 • V 3 ( t ) - b 2 • V 2 ( t ) + b • V ( t ) + b 0 ) ■ (11) Vi
Дискретные значения коэффициентов K Vi /30 представлены на рис. 10.
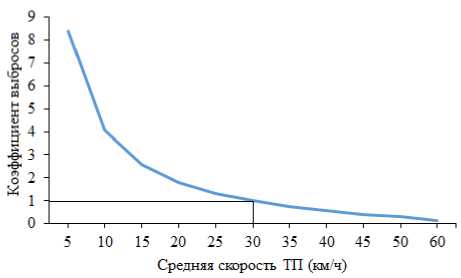
Рис. 10. Изменение коэффициента выбросов ВВ на УДС при различных средних скоростях ТП
Количество выбросов загрязняющих веществ значительно зависит от средней скорости транспортного потока (см. рис. 10). Так, при снижении средней скорости с 30 до 10 км/ч количество выбросов на перекрёстке увеличивается в 4 раза. А при увеличении средней скорости с 30 до 50 км/ч количество выбросов на перекрёстке снижается примерно в 3 раза.
Исследование равноускоренного движения ТС
Следует отметить, что при равноускоренном движении ТС, от нулевой скорости до скорости V0 на выезде с перекрёстка, требуется в два раза больше времени по отношению к его равномерному движению со скоростью V0. То есть количество вы- бросов загрязняющих веществ при остановке ТС перед запрещающим сигналом светофора увеличивается, как минимум, в два раза. Это говорит об актуальности организации проезда перекрёстков без остановки ТС перед стоп-линией перекрёстка.
Количество выбросов M LV на L 0 в районе перекрёстка от потока ТС, движущегося однородно с произвольной переменной скоростью V(t) , определяется на основании уравнения (8).
В случае равноускоренного движения транспортного потока ( V=a 0 •t ) , формула (8) принимает следующий вид:
t 1
M LV о = С о J ( b 3 ( a о t ) 3 - b 2 ( a о t ) 2 + b i ( a о t ) + b o ) dt , (12) 0
где t 1 - время разгона транспортных средств от 0 до скорости V 0; а 0 = V 0 /t 1 - постоянное ускорение разгона транспортных средств.
В случае же равномерного движения транспортного потока со скоростью V 0 количество выбросов загрязняющих веществ определяется как:
t 2
M l V о = С о J( r v [ V o ] ) dt = С о • T v о • t 2 , (13)
где t 2 = L 0 / V 0 - время движения транспортных средств на том же отрезке L 0; причём, как было показано ранее, t 2 = t 1 / 2.
Тогда относительный коэффициент сравнения выбросов при равноускоренном и равномерном движении транспортного потока при скорости V0 рассчитывается:
ML ' V 0
K V о = " =
MLV о t2
J i b 3 ( а о t ) - b 2 ( а о t ) + b 1 ( a о t ) + Ьо ^t
= -------------------------------------------. (14)
r v 0 • t 2
Расчётные значения коэффициентов K Vi для различных конечных скоростей разгона V 0 представлены на рис. 11.
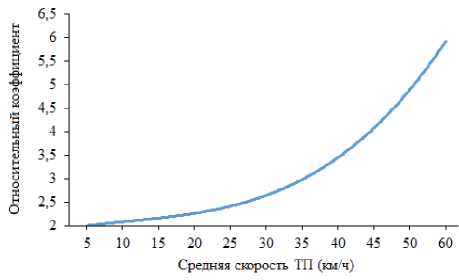
Рис. 11. Относительный коэффициент сравнения выбросов при равноускоренном и равномерном движении ТП
Как следует из расчётов, увеличение выбросов варьируется минимум от 2-х раз при низких скоростях движения, и до 6 раз при скорости 60 км/ч. Что опять же подтверждает экологическую целесообразность организации проезда перекрёстков без остановки транспортных средств.
Выводы
Параметры ТП взаимосвязаны, не поддаются жесткому управлению, имеют стохастичный характер и зависят от геометрических параметров УДС, планировки городских улиц и организации дорожного движения.
В данной работе предложен мониторинг в режиме реального времени таких параметров ТП, как скорость и ускорение каждого ТС, его тип, что позволяет оценить и спрогнозировать время задержки ТП. В результате выявлены наиболее значимые факторы, управляя которыми можно эф- фективно влиять на пропускную способность полосы движения ТС. Проведены исследования влияния скорости и ускорения ТС на выбросы загрязняющих веществ.
На основе разработанной методики расчета времени разъезда очереди внегрупповых транспортных средств и исследования влияния ускорения на пропускную способность можно сделать вывод, что показатель ускорения ТС на каждом участке УДС имеет большое значение и влияет на общие характеристики ТП в целом.
Рациональное управление ТП, особенно в зоне перекрестка, где ТС вынуждены делать остановку и ожидать разрешающий сигнал СО, позволит значительно снизить загрязнение воздуха выбросами от автотранспорта.
Список литературы Влияние пропускной способности регулируемых пересечений на количество выхлопных газов от автотранспорта
- Кременец Ю.А., Печерский М.П., Афанасьев М.Б. Технические средства организации дорожного движения. М.: ИКЦ «Академкнига», 2005.
- Афанасьев М.Б. и др. Условия введения различных режимов регулирования дорожного движения. М.: Изд-во ВНИИ БД МВД СССР, 1976. 319 с.
- Врубель Ю.А. О потоке насыщения / Белорус. политех. ин-т. Минск, 1988. 7 с. Рук. деп. в ЦБНТИ Минавтотранса РСФСР, № 663 ат. 89.
- Клинковштейн Г.И., Афанасьев М.Б. Организация дорожного движения. М.: Транспорт, 2001. 247 с.
- Жданов В.Л. Технические средства организации дорожного движения: учебное пособие. Кемерово: КузГТУ имени Т.Ф. Горбачева, 2017. 267 с.
- Highway Capacity Manual. TRB, Washington, DC, 2000. 1134 p.
- Teply S., Allingham D.I., Richardson D.B., Stephenson B.W., Gough J.W. (2008) Canadian Capacity Guide for Signalized Intersections. 3rd ed. Institute of Transportation Engineers.
- Wodrop J. Some theoretical aspects of road traffic research // Proc. Inst. Civ.Eng. Part II, 1952, 1(2). P. 325–365.
- Webster F.V., Cobbe B.M. Traffic Signals Road Research Technical Paper N56, HMSQ, London, 1966. 111 p.
- Branston D. Some factors affecting the capacity of signalized inter-section // Traffic Eng. and Contr., 1979. V. 20, N 8-9. P. 390–396.
- Branston D., Van Zulien H.J. The estimation of saturation flow, effective green time and passenger car equivalents at traffic signals by multiple liner regression // Transp. Res., 1987. V. 12. P. 47–53.
- Shanteau R.M. Using cumulative curves to measure saturation flow and lost time // ITE Journal, 1988. V. 15, N 10. P. 27–31.
- Stokes R.W. Comparison of saturation flow rates at signalized inter-sections // ITE Journal, 1988. V. 15, N 11. P. 15–20.
- Shepelev V., Aliukov S., Nikolskaya K., Das A., Slobodin I. (2020). The Use of Multi-Sensor Video Surveillance System to Assess the Capacity of the Road Network // Transport and Telecommunication, 21 (1), 15–31. DOI: 10.2478/ttj-2020-0002
- Видеонаблюдение в г. Челябинске онлайн. URL: https://cams.is74.ru/live
- Dunbar J.C., Lin C.-I., Vergucht I., Wong J., Durant J.L. Estimating the contributions of mobile sources of PAH to urban air using real-time PAH monitoring (2001) // Science of the Total Environment, 279 (1-3), pp. 1–19. DOI: 10.1016/S0048-9697(01)00686-6
- Allegrini I., Costabile F. Monitoring air quality in urban areas: Experiences in China (2008) // Sustaina-ble Development and Environmental Management: Experiences and Case Studies, pp. 125–139. DOI: 10.1007/978-1-4020-8229-0_9
- Adams M.D., Kanaroglou P.S. Mapping real-time air pollution health risk for environmental manage-ment: Combining mobile and stationary air pollution monitoring with neural network models (2016) // Journal of Environmental Management, 168, pp. 133–141. DOI: 10.1016/j.jenvman.2015.12.012
- Baldasano J.M., Gonçalves M., Soret A., Jiménez-Guerrero P. Air pollution impacts of speed limitation measures in large cities: The need for improving traffic data in a metropolitan area (2010) // Atmospheric Envi-ronment, 44 (25), pp. 2997–3006. DOI: 10.1016/j.atmosenv.2010.05.013
- Coelho M.C., Farias T.L., Rouphail N.M. Impact of speed control traffic signals on pollutant emissions (2005) // Transportation Research Part D: Transport and Environment, 10 (4), pp. 323–340. DOI: 10.1016/j.trd.2005.04.005
- Scora G., Morris B., Tran C., Barth M., Trivedi M. Real-time roadway emissions estimation using visual traffic measurements (2011) // IEEE Forum on Integrated and Sustainable Transportation Systems, FISTS 2011, статья № 5973651. P. 40–47. DOI: 10.1109/FISTS.2011.5973651
- Mądziel M., Jaworski A., Kuszewski H., Woś P., Campisi T., Lew K. The Development of CO2 Instantaneous Emission Model of Full Hybrid Vehicle with the Use of Machine Learning Techniques (2022) // Ener-gies, 15 (1), статья № 142. DOI: 10.3390/en15010142
- Lejri D., Can A., Schiper N., Leclercq L. Accounting for traffic speed dynamics when calculating COPERT and PHEM pollutant emissions at the urban scale (2018) // Transportation Research Part D: Transport and Environment, 63, pp. 588–603. DOI: 10.1016/j.trd.2018.06.023
- Ding H., Cai M., Lin X., Chen T., Li L., Liu Y. RTVEMVS: Real-time modeling and visualization sys-tem for vehicle emissions on an urban road network (2021) // Journal of Cleaner Production, 309, № 127166. DOI: 10.1016/j.jclepro.2021.127166
- Morris B.T., Tran C., Scora G., Trivedi M.M., Barth M.J. Real-time video-based traffic measurement and visualization system for energy/emissions (2012) // IEEE Transactions on Intelligent Transportation Systems, 13 (4), № 6287593, pp. 1667–1678. DOI: 10.1109/TITS.2012.2208222
- Official Site of the COPERT 4 Model. (2008) COPERT. URL: http://lat.eng.auth.gr/copert
- Lejri D., Can A., Schiper N., Leclercq L. Accounting for traffic speed dynamics when calculating COPERT and PHEM pollutant emissions at the urban scale (2018) // Transportation Research Part D: Transport and Environment, 63, pp. 588–603. DOI: 10.1016/j.trd.2018.06.023
- Приказ Министерства природных ресурсов и экологии РФ от 27 ноября 2019 г. № 804 «Об утверждении методики определения выбросов загрязняющих веществ в атмосферный воздух от передвижных источников для проведения сводных расчетов загрязнения атмосферного воздуха». URL: https://www.garant.ru/products/ipo/prime/doc/73240708/
- ГОСТ Р 56162-2019. Выбросы загрязняющих веществ в атмосферу. Метод расчета количества выбросов загрязняющих веществ в атмосферу потоками автотранспортных средств на автомобильных дорогах разной категории. URL: https://docs.cntd.ru/document/1200167788
