Влияние сферичности земной поверхности на управление ориентацией космического аппарата дистанционного зондирования Земли

Автор: Алексеев А.В., Голушкова А.О.
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Математическое моделирование и обработка данных
Статья в выпуске: 4, 2024 года.
Бесплатный доступ
В статье рассматривается способ переориентации космического аппарата дистанционного зондирования Земли, движущегося по круговой орбите с помощью двигателей-маховиков. При этом учитывается влияние гравитационного момента, а движение рассматривается на интервале времени, когда объект наблюдения находится в прямой видимости космического аппарата. В ходе исследования выведены геометрические зависимости углов нутации и прецессии от времени, определена область видимости объекта, построены дифференциальные уравнения движения космического аппарата относительно центра масс и получены их решения. Полученные зависимости позволяют оценивать влияние инерционно-массовых характеристик системы, начальных условий на управление движением космического аппарата. Построены зависимости управляющих вращением роторов моментов от времени, что позволило оценить параметры необходи -мых для этих целей двигателей. В статье представлены результаты проведенных исследований, показывающие работоспособность разработанной математической модели. Практическим приложением может являться использование полученных результатов при нацеливании космических аппаратов на объект наблюдения.
Гиростат, маховик, математическая модель, уравнения движения, управляющие моменты, углы эйлера, дистанционное зондирование, кинетический момент
Короткий адрес: https://sciup.org/148330466
IDR: 148330466 | УДК: 51-7 | DOI: 10.18101/2304-5728-2024-4-3-11
The influence of the sphericity of the Earth’s surface on the orientation control of the earth remote sensing spacecraft
The article considers a method of reorientation of a space remote sensing apparatus of the Earth moving in a circular orbit using flywheel engines. In this case, the influence of the gravitational moment is taken into account, and the movement is considered at the time interval when the object of observation is in the line of sight of the spacecraft. In the course of the research, geometric dependences of the angles of nutation and precession on time were derived, the object's field of view was determined, differential equations of motion of the spacecraft relative to the center of mass were constructed and their solutions were obtained. The obtained dependences make it possible to evaluate the influence of the inertial mass characteristics of the system and the initial conditions on the motion control of the spacecraft. The dependences of the moments controlling the rotation of the rotors on time are constructed, which made it possible to estimate the parameters of the engines necessary for these purposes. The article presents the results of the conducted studies showing the operability of the developed mathematical model. A practical application may be the use of the results obtained when aiming spacecraft at an object of observation.
Текст научной статьи Влияние сферичности земной поверхности на управление ориентацией космического аппарата дистанционного зондирования Земли
Дистанционное зондирование Земли (ДЗЗ) является одной из важнейших задач космической отрасли, которая в настоящее время приобрела жизненно необходимый характер. Наиболее распространенным способом нацеливания космического аппарата (КА) на объект земной поверхности является использование двигателей малой тяги, применение которых предполагает расход топлива, что ограничивает количество переориентаций, а, следовательно, и наблюдений. Одним из вариантов, позволяющих избежать проблемы расхода рабочего тела, является применение электрических двигателей-маховиков [1]. Кроме того, отсутствие запаса топлива на борту КА подразумевает уменьшение его рабочей массы, что позволяет установить более качественную оптическую аппаратуру.
Движение систем, содержащих массивные вращающиеся элементы, изучали многие отечественные и зарубежные исследователи, результаты которых приведены, например, в [2-11]. Основным направлением их исследований была устойчивость движения при наличии различных динамических возмущений. Относительно малое число работ содержит конкретные рекомендации по управлению системой для обеспечения некоторого заданного движения.
В настоящей работе производится попытка решения конкретной прикладной задачи: определения законов управления ориентацией КА ДЗЗ с частичной закруткой при движении по круговой орбите для наблюдения за объектом, заключающихся в зависимостях управляющих внутренних моментов от времени. В статьях [12, 13] решается подобная задача для ограниченных случаев: одномерного и двумерного без учета сферичности земной поверхности.
-
1 Уравнения движения системы
Будем рассматривать КА ДЗЗ с двигателями-маховиками как твердотельную систему, состоящую из несущего (основного) динамически несимметричного твердого тела, внутри которого расположены три одинаковых, динамически симметричных ротора, которые могут вращаться вокруг своих осей, совпадающих с главными осями инерции всей системы [13]. Подобные КА называют гиростатами или спутниками-гиростатами. Динамические уравнения движения такой системы приведены, например, в [2, 11].
Согласно методике, приведенной в [14], введем в рассмотрение систему координат CXaYaZa с началом отсчета в центре масс Земли C , которую условно будем считать абсолютной. Ось CZa направим вдоль оси вращения Земли. С центром масс O спутника-гиростата свяжем две системы координат: орбитальную OXYZ , и связанную Oxyz (рис. 1).
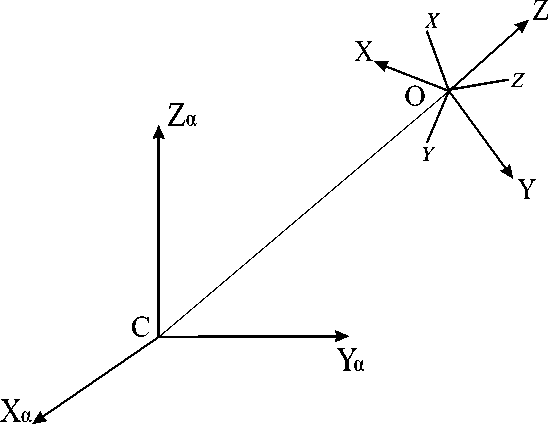
Рис. 1. Абсолютная, орбитальная и связанная системы координат
Для определения ориентации КА будем применять классические углы Эйлера ϑ , ψ , ϕ (нутации, прецессии и собственного вращения). Проекции вектора угловой скорости несущего тела p , q , r на оси связанной системы координат выражаются кинематическими соотношениями [14]:
a21 = sinψcosϕ+ cosψcosϑsinϕ, a22 =-sinψsinϕ+cosψcosϑcosϕ, a23 = -cosψsinϑ, a31 = sinϑsinϕ, a32 = sinϑcosϕ, a33 = cosϑ.
Динамические уравнения строятся с помощью теоремы об изменении момента количества движения:
Ap + ( C - B ) qr - 3 ® 2 ( C - B ) a 32 a 33 + 1 6 1 + 1 ( q a 3 - r e 2) = 0,
Bq + ( A - C ) rp - 3 ® 02( A - C ) a 33 a 31 + I d 2 + 1 ( r a 1 - p a 3) = 0, (2)
Cr + ( B - A ) pq - 3(i p . ( B - A ) a 31 a 32 + I d 3 + 1 ( p a 2 - q a 1 ) = 0, где A , B , C — главные центральные моменты инерции системы относительно осей связанной системы координат; I — момент инерции каждого ротора относительно своих осей вращения; a 1, a 2, а 3— относительные угловые скорости роторов. В связи с тем, что иное внешнее воздействие, кроме гравитационного, не учитывается, в правых частях уравнений (2) остаются нули.
Для описания движения роторов также на основании теоремы об изменении момента количества движения составляются следующие уравнения:
A 1 ( p + a i ) = M a ;
B 2 ( q + a 2 ) = M в ; (3)
c3(r+a3)=My , где Ma, Mp, MY — управляющие внутренние моменты, действующие со стороны несущего тела на роторы. В работе ставится задача определения этих моментов, которые обеспечат в течение некоторого времени нацеливание КА ДЗЗ на объект наблюдения.
А^а
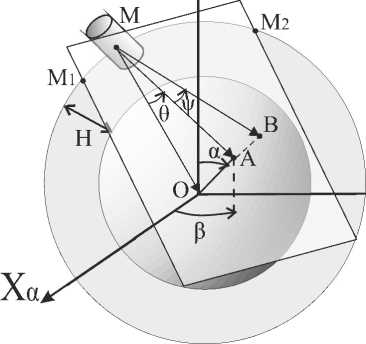
Рис. 2. Определение зоны видимости объекта и углов ориентации
>
Ya
-
3 Определение области видимости объекта
Предположим, КА движется по орбите, уравнение которой в системе координат OX a Y a Z a имеет вид:
у2 + z2 = (R + H )2, где R — радиус Земли.
Уравнение поверхности Земли в координатах OX a Y a Z a :
X2 + у2 + z2 = R2.
Касательную плоскость к поверхности Земли (5) найдем по формуле:
FX( x - x о)+Fy( у - у о)+Fz(z -z о) =0, где Fx, Fy, Fz — производные уравнения (5), (x0, у0, z0) — координаты объекта.
Решив систему уравнений (4) и (6) с условием x = 0 , получим координаты точек на орбите M 1 , M 2 , которые появляются при пересечении касательной плоскости с орбитой и являются границами области видимости объекта.
-
4 Внутренние управляющие моменты
Построив векторы MA, MB , MO , получим зависимости углов нутации и прецессии от времени (рис. 3, 4):
& = Arccos
uuur uuuur
MA • MO
uuuur uuuur
[ I MA I-I MO\ J
у = Arccos
uuur uuur
MA • MB
uuuur uuuur
I MA -| MB J
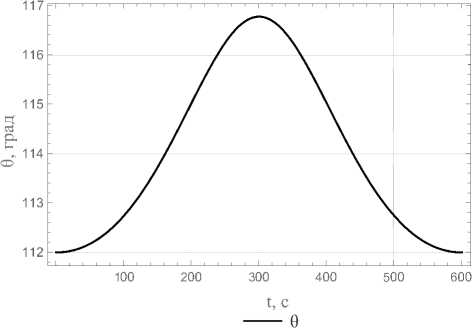
Рис. 3. Зависимость угла нутации от времени
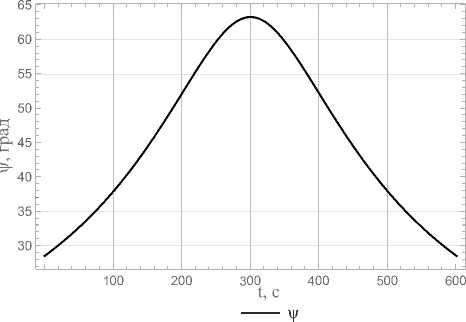
Рис. 4. Зависимость угла прецессии от времени
Чтобы определить зависимости собственных угловых скоростей вращения роторов проинтегрируем систему дифференциальных уравнений (1)-(2) численно с учётом (7)-(8) при соответствующих начальных условиях: c i (0) = 0, (j i (0) = 0, i = 1,3 ; инерционно-массовых характеристиках системы: A = 1000 кг • м 2 , B = 1500 кг • м 2 , C = 2000 кг • м 2 , I = 100 кг • м 2; параметров, характеризующих орбиту: H = 500 000 м ,
R = 6371100 м и конкретном положении объекта наблюдения: a = 3 п /7 , в = л/ 6 . Численные зависимости угловых скоростей роторов от времени приведены на графиках (рис. 5).
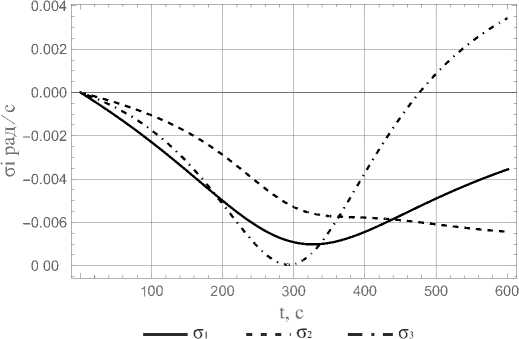
Рис. 5. Зависимости собственных угловых скоростей роторов от времени
Чтобы определить законы изменения внутренних управляющих моментов (рис. 6), подставим зависимости ускорений, полученные выше, в
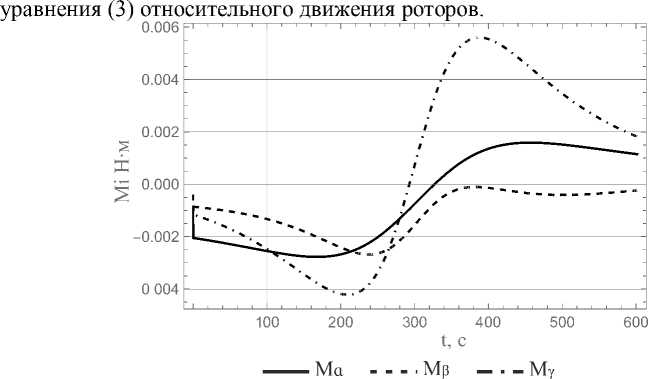
Рис. 6. Зависимости внутренних управляющих моментов от времени
Заключение
К основным результатам работы можно отнести аналитические зависимости углов нутации и прецессии от времени, при обеспечении которых ось КА ДЗЗ всегда направлена на объект наблюдения; определение области видимости объекта, ограниченной из-за сферичности Земли; численные зависимости от времени внутренних управляющих моментов, обеспечивающих необходимые углы ориентации КА. Кроме того, отдельно следует отметить, что в данной работе учтено воздействие гравитационного момента.
Список литературы Влияние сферичности земной поверхности на управление ориентацией космического аппарата дистанционного зондирования Земли
- Рыжков В. В., Сулинов А. В. Двигательные установки и ракетные двигатели малой тяги на различных физических принципах для систем управления малых и сверхмалых космических аппаратов // Вестник Самарского университета. Аэрокосмическая техника, технологии и машиностроение. 2018. Т. 17, № 4. С. 115–128. DOI: 10.18287/2541-7533-2018-17-4-115-128.
- Румянцев В. В. Об управлении ориентацией и о стабилизации спутника роторами // Вестник Московского университета. Серия 1: Математика, механика. 1970. №. 2. С. 83–96.
- Румянцев В. В. Об устойчивости вращения тяжелого гиростата на горизонтальной плоскости // Известия академии наук. Механика твердого тела. 1980. № 4. C. 11–21.
- Сарычев В. А. Вопросы ориентации искусственных спутников. Итоги науки и техники. Серия «Исследование космического пространства». Москва: ВИНИТИ, 1978. Т. 11. 224 с.
- Охоцимский Д. Е., Сарычев В. А. Система гравитационной стабилизации искусственных спутников // Искусств. Спутники Земли. Москва: Изд-во АН СССР, 1963. № 16. С. 5–9.
- Кошляков В. Н. Задачи динамики твердого тела и прикладной теории гироскопов. Москва: Наука, 1985. C. 286.
- Морозов В. М. Устойчивость движения космических аппаратов. Итоги науки и техники. Сер. «Общая механика». Москва: ВИНИТИ АН СССР, 1971. С. 5–83.
- Нейштадт А. И., Пивоваров М. Л. Переход через сепаратрису в динамике спутника с двойным вращением // Прикладная математика и механика. 2000. Т. 64, № 5. С. 741–746.
- Виттенбург Й. Динамика систем твердых тел. Москва: Мир, 1980. C. 292.
- Асланов В. С., Дорошин А. В. О двух случаях движения неуравновешенного гиростата // Известия Академии наук. Механика твердого тела. 2006. № 4. С. 42–55.
- Асланов В. С., Дорошин А. В. Стабилизация спускаемого аппарата частичной закруткой при осуществлении неуправляемого спуска в атмосфере // Космические исследования. 2002. Т. 40, № 2. С. 193–200.
- Алексеев А. В., Голушкова А. О. Переориентация космического аппарата дистанционного зондирования Земли с помощью роторов // Инфокоммуникационные технологии. 2023. Т. 21, № 2 (82). С. 24–29.
- Алексеев А. В., Голушкова А. О. Управление космическим аппаратом дистанционного зондирования Земли с помощью роторов // Вестник Бурятского государственного университета. Математика, информатика. 2024. № 1. С. 18–27.
- Гутник С. А. Динамика движения спутника относительно центра масс с пассивными системами ориентации: автореферат диссертации на соискание ученой степени доктора физико-математических наук: 01.02.01 / Гутник Сергей Александрович; [Место защиты: ФГБОУ ВО «Московский авиационный институт» (национальный исследовательский университет)]. Москва, 2019. 47 с.
- Маркеев А. П. Теоретическая механика. Ижевск: НИЦ «Регулярная и хаотическая динамика», 1990. 591 с.
- Лурье А.И. Аналитическая механика. Москва: Физматлит, 1961. 824 с.
- Апель П. Теоретическая механика. Москва: Физматгиз, 1960. Т. 1-2. 515 с.; 487 с.
