Возможность транспортирования круглых лесоматериалов грузовыми платформами на магнитной подвеске

Автор: Евдокимов Б.П., Свойкин В.Ф., Сундуков Е.Ю.
Журнал: Resources and Technology @rt-petrsu
Статья в выпуске: 5, 2005 года.
Бесплатный доступ
Описывается возможность транспортировки круглых лесоматериалов грузовыми платформами на магнитной подвеске, показаны общий вид грузовой платформы, схема элемента шасси и статорных обмоток путепровода. Сделан вывод о возможности создания таких систем.
Круглые лесоматериалы, грузовая платформа, ограничитель перемещения, шасси, магнитная подвеска
Короткий адрес: https://sciup.org/147112132
IDR: 147112132
Текст научной статьи Возможность транспортирования круглых лесоматериалов грузовыми платформами на магнитной подвеске
СОСТОЯНИЕ ВОПРОСА
Существующие способы транспортировки лесоматериалов требуют значительных энергетических затрат и наносят вред окружающий среде.
Одним из направлений при решении транспортной задачи может быть использование для транспортировки круглых лесоматериалов транспортных средств на магнитной подвеске. Основным принципом функционирования таких транспортных средств является взаимодействие двух магнитов, один из которых размещен на путепроводе, другой - на транспортном средстве (грузовой платформе). Для перемещения грузовой платформы необходимо приложить толкающее усилие. Обычно в транспортных схемах на магнитной подвеске такое усилие задает линейный двигатель. Отсутствие механического контакта платформы с путем обеспечи- вает почти идеальную плавность хода при самых высоких скоростях.
Таким образом, транспортировка круглых лесоматериалов грузовыми платформами на магнитной подвеске теоретически возможна.
Для этого на шасси платформы необходимо установить источники магнитного поля, а путь оборудовать статорными обмотками.
В качестве источника магнитного поля могут быть использованы сверхпроводящие соленоиды, блоки постоянных магнитов и обычные электромагниты как с ферромагнитными сердечниками, так и без них.
Поскольку движущая платформа должна иметь меньший вес и создавать сильное магнитное поле, то в качестве магнитных источников целесообразно применять магнитное устройство на сверхпроводнике.
-
1. Стабилизация грузовых платформ
при движении
Основной проблемой при реализации способа транспортировки является обеспечение стабилизации платформ при движении.
Данная проблема решается при помощи устройства ограничителя перемещений (рис. 1).
Ограничитель перемещений представляет собой подразумеваемую цилиндрическую поверхность 2, размещенную вдоль путепровода и имеющую в сечении вертикальной плоскостью эллипс. Поверхность моделируется при помощи статорных обмоток и источников магнитного поля, размещенных на перемещаемом объекте 1.
Анализ технических решений по данной проблеме показывает, что для объекта 1 обтекаемой формы необходима стабилизация по крайней мере в трех точках (X >. Х^.-.Х^ где i > 3) на всем протяжении путепровода, причем хотя бы две точки стабилизации должны быть разнесены на расстояние, примерно равное В, где В -максимальная ось эллипса в вертикальном сечении ограничителя 2.
Для стабилизации перемещаемого объекта в заданных точках лучшим образом подходит магнитная подвеска на основе эффекта «магнитной потенциальной ямы», который заключается в возможности существования минимума потенциальной энергии магнитного взаимодействия как функции расстояния между двумя магнитными элементами либо идеально электропроводящими витками, либо в паре с идеально электропроводящим витком и постоянным магнитом [3].
Условия устойчивости магнитной системы двух идеально проводящих токовых колец показаны на рисунке 2 и определяются выражением:
а1 а2 < 1
R? 2 ’
где а, - радиус 1-го кольца;
-
а2 - радиус 2-го кольца;
-
R - расстояние между кольцами.
-
2. Силы,задающие перемещение элемента шасси грузовой платформы
При этом магнитные потоки Фь Ф2, наведенные в кольцах, должны быть постоянны по значению и не равны друг другу.
Чтобы обеспечить выполнение условий устойчивости на всем протяжении путепровода, статорные обмотки выполняются в виде винтовых спиралей, витки которых расположены в плоскостях, параллельных направлению движения. В качестве источников магнитного поля на основе сверхпроводников могут служить криостаты с размещенными внутри них короткозамкнутыми контурами кольцевой формы. Для обеспечения постоянного магнитного взаимодействия во время перемещения витки статорных обмоток должны иметь меньший радиус, а кольцевой контур источника магнитного поля платформы -■ больший.
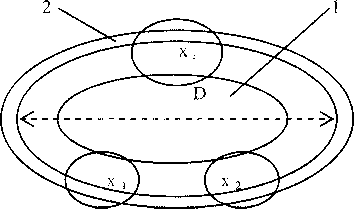
Рис. 1. Устройство ограничителя перемещений объекта обтекаемой формы
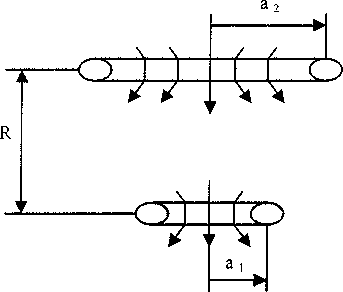
Рис. 2. Магнитная система двух идеально проводящих токовых колец
При использовании двух жесткосвязанных магнитных источников, симметрично расположенных друг относительно друга, имеем симметричный ротор с вертикальной осью. Систему с ротором целесообразно использовать в качестве элемента шасси грузовой платформы
(рис. 3). При этом взаимодействующие с магнитными источниками 2 элемента шасси 1 две статорные обмотки 3, 4 соосными витками образуют последовательность вертикальных статоров на всем протяжении путепровода. Для создания статорного магнитного поля обмотки 3 и 4 запитываются от источников напряжения U, иД.
Перемещение элемента шасси 1 возможно осуществлять при изменении углов наклона источников магнитного поля 2 относительно статорных обмоток 3, 4.
Силы, задающие перемещение элемента шасси, показаны на рисунке 4. В начальный момент (прерывистая линия) положение элемента шасси ], выведенного на сверхпроводящую магнитную опору, стабилизировано за счет соосного магнитного взаимодействия между источниками 2 и витками обмоток 3 и 4, образующими вертикальный статор. Магнитные силы F (сила магнитного взаимодействия витков обмотки 3 и верхнего магнитного источника 2) и F (сила магнитного взаимодействия витков обмотки 4 и нижнего магнитного источника 2) уравновешивают друг друга. Кратковременным изменением положения источников 2 или одного из них равновесие системы нарушается, силы F, и Р2 преобразуются в силы Р] и Р2, действующие под углом, их результирующая сила Р выталкивает элемент шасси I в пространство магнитного взаимодействия с новым вертикальным статором, где его положение стабилизируется при достижении соосного взаимодействия. Дальнейшее перемещение происходит при последующих выталкиваниях элемента шасси 1.
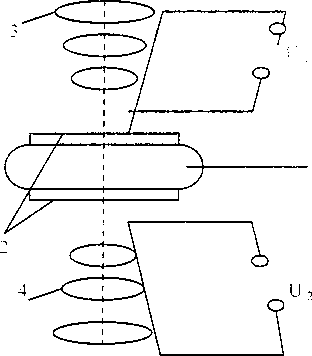
Рис. 3. Схема элемента шасси грузовой платформы и статорных обмоток путепровода
Обмотки 3 и 4 запитываются различными по величине напряжениями U, и U2, так как каждая из обмоток в большей или меньшей степени компенсирует действие силы тяжести элемента шасси 1. Синхронизация напряжений U] и U2 достигается тем, что обмотки катушек 3, 4 идентичны (выполнены из одинакового материала, имеют одинаковую длину и число витков).
Форма токов в обмотках I, и 12 показана на временных диаграммах. Постоянное значение токов I, и 12обеспе- чивает магнитную подвеску. Для синхронизации процесса выталкивания токи I] и 12 претерпевают некоторую модуляцию, что вызывает увеличение сил р! иГ2 в момент времени, когда нужно произвести выталкивание. При этом срабатывает схема управления изменением углов наклона магнитных источников, что можно осуществить эксцентриковыми кулачками (рис. 4).
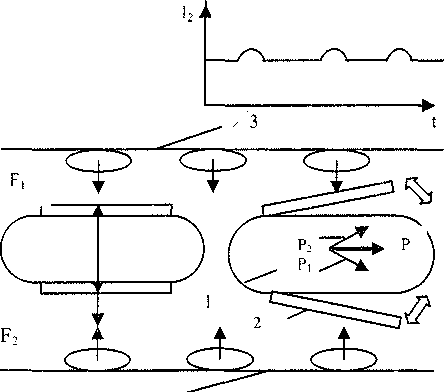
Рис. 4. Силы, задающие перемещение элемента шасси
Направление выталкивания от одного вертикального статора к другому задается разворотом магнитных источников 2 по отношению к направлению перемещения элемента шасси 1 на некоторый угол А (аналогично гребку лодочного весла).
Величину угла А можно определить по формуле:
д = ^тяги _ та _ а
^подъема т§ 8
где а - ускорение разгона (торможения) платформы (м/с2);
g - ускорение свободного падения (м/с2);
Гтяг||-тяговое усилие (Н);
Гподъема - подъемная сила, обеспечивающая левитацию платформы (Н);
т- масса платформы (кг).
По расчетам специалистов научно-инженерного центра «ТЕМП», являющегося головным предприятием России по транспортным системам на магнитной подвеске, для безопасности движения тяговое оборудование должно обеспечить аварийное замедление до 3 м/с", тогда tgA = 0,3, а значит угол А = 16,7°. При этом для источника магнитного поля с реальной длиной порядка 0,5 м требуется обеспечить рабочий зазор между платформой и статорными обмотками путепровода 0,14 м.
Исследования, проведенные в институте кибернетики им. В. М. Глушкова АН Украины, показали, что перемещаемый объект на основе эффекта «магнитной потенциальной ямы» может иметь зазор левитации 10-50 см /4/, в то время как действующие образцы (проект MLU, Япония) поднимают вагон лишь на 0,05 м.
Для обеспечения большей устойчивости два расположенных симметрично и соединенных друг с другом элемента шасси образуют несущую ось.
Источники магнитного поля, положение которых может быть изменено, размещают на ведущих осях.
Общий вид грузовой платформы показан на рис. 5, где 1 - грузовая платформа, 2 - источники магнитного поля грузовой платформы, 3 - верхняя обмотка путепровода, 4 - нижняя обмотка путепровода, 5 - держатель обмотки путепровода. При этом стабилизация осуществляется в четырех точках. Габаритные размеры грузовой платформы определены: ширина равна D, длина зависит от числа несущих осей.
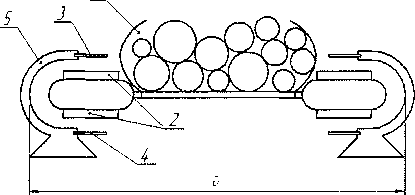
Рис. 5. Общий вид грузовой платформы на магнитной подвеске
ВЫВОД теоретические исследования показывают возможность создания транспортных систем на магнитной подвеске для транспортировки круглых лесоматериалов; по итогам исследования получен патент на изобретение № 2199451 от 27.02.2003 г.
