Возможности развития метода преобразования структурных схем в задачах динамики виброзащитных систем (часть I)
")
Автор: Хоменко А.П., Елисеев С.В., Большаков Р.С., Нгуен Дык Хуинь
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Рубрика: Технические науки
Статья в выпуске: 3 (60), 2016 года.
Бесплатный доступ
Предлагается метод построения математических моделей колебательных механических систем, в частности виброзащитных, и оценки возможных свойств на основе динамических жесткостей. Вводится понятие обобщенной динамической жесткости с возможностями к идентификации на уровне системы в целом, а также для ее фрагментов. Показаны и развиты подходы для построения структурных математических моделей в виде динамических аналогов систем автоматического управления. В задачах вибрационной защиты предложена технология построения системы с выделением объекта защиты как звена с передаточной функцией интегрирующего типового элемента второго порядка. Динамическая жесткость системы интерпретируется как коэффициент усиления в цепи обратной связи, охватывающей объект защиты. Показано, что динамическая жесткость системы в целом может быть представлена в виде системы частотных функций, для которых предложен графо-аналитический метод определения частот собственных колебаний, а также частот характерных режимов, в том числе динамического гашения колебаний. Исследованы возможные формы самоорганизации совместных движений взаимодействующих элементов, возникающих при «обнулении» динамической жесткости. Предложен метод определения динамических жесткостей, основанный на преобразованиях частотного характеристического уравнения системы. Показаны возможности прямых методов построения операторных форм динамических жесткостей непосредственно по схеме механической колебательной системы цепного типа. Метод основан на правилах преобразований теории цепей. Показаны возможности использования в преобразованиях математических моделей и в задачах оценки динамических свойств структурных образований из массоинерционных и упругих элементов. Такие образования предложено рассматривать как квазипружины. Для решения задач в системах более двух предложено использование обобщенных парциальных систем. Приводятся результаты численного моделирования.
Динамические жесткости, квазипружины, динамические реакции, парциальные системы
Короткий адрес: https://sciup.org/142148247
IDR: 142148247 | УДК: 62.752,
The development possibilities of transformation method of structural schemes in tasks of dynamics of vibroprotection systems (part I)
The research proposes the method of creature of mathematical models of oscillation mechanical systems, including vibration protection systems, and estimation of possible properties on base of dynamical rigidity. The article introduces the definition of dynamical rigidity with possibilities to identification on level of entire system and its fragments. It shows the approaches for creature of structural mathematical models in view of dynamical analogs of automation control systems. They offer the technology of creature of system with allocation of protection object as link with transfer function of integrated typical element of the second order in tasks of vibration protection. It interprets the dynamical rigidity of system as an amplification factor in feedback tie chain of protection object. The authors analyze the dynamical rigidity of the entire system in view of frequency functions system. It offers graph-analytical method of identification of own oscillations frequencies and characteristic regimes. It includes frequency of dynamical absorption of oscillations. The possible forms of self-organization of joint movements of interacted elements are developed. They occur at «zeroing» of dynamical rigidity. The work suggests the method of identification of dynamical stiffness, which bases on transformations of frequency characteristic equation of system. It provides the possibilities of straight methods of creature of operator forms of dynamical stiffness's directly on scheme of mechanical oscillation system of chain type. The method bases on transformations rules of chain theory. The article considers the possibilities of using in transformation of mathematical models and in tasks of estimation of dynamical properties of structures at mass inertial and elastically elements. It proposes to consider these structures as quasi-springs. It is necessary to use generalized partial systems for solving tasks in such systems. The results of numerical modeling are given.
Текст научной статьи Возможности развития метода преобразования структурных схем в задачах динамики виброзащитных систем (часть I)
Структурное математическое моделирование находит достаточно широкое применение в задачах динамики машин, особенно в тех направлениях, которые связаны с исследованиями вибрационных процессов [1 - 4]. В рамках таких подходов исходная механическая система отображается расчетной схемой в виде механической колебательной системы, той или иной сложности, с последующим построением структурной модели на основе теории графов, теории цепей или теории автоматического управления. Построение структурной модели может производиться непосредственно по расчетной схеме или через предварительное составление математической модели в виде системы линейных дифференциальных уравнений. Для реализации соответствующих технологий построения структурных моделей используются преобразования Лапласа [5, 6]. Технология построения структурных математических моделей в детализированном виде нашла отражение в работах [7 - 10]. Вместе с тем ряд вопросов, связанных с преобразованиями структурных моделей, особенно при наличии непланарных и перекрестных связей, еще не получил должной детализации представлений, что стимулирует развитие исследований, особенно в приложениях к системам трех и более степеней свободы.
В предлагаемой статье метод структурных преобразований развивается в направлении учета особенностей межкоординатных связей в системах с тремя степенями свободы при наличии в структурах замкнутых контуров.
Общие положения. Постановка задачи исследования
В качестве исходной расчетной схемы рассматривается механическая колебательная линейная система цепного типа с тремя степенями свободы с сосредоточенными параметрами (рис. 1). Такие расчетные схемы используются, например, в задачах динамики вибрационной защиты машин, приборов и оборудования [6 - 8]. В качестве внешних возмущений принимаются силовые гармонические воздействия Qi ( i = 1,3 ). Кроме того, возможен учет действия кинематических возмущений z k (к = 1,2 ), связанных с опорными поверхностями I и II (рис. 1). В качестве основной выбрана неподвижная система координат y 1 , y 2 , y 3 ; силы трения считаются пренебрежимо малыми, а движение элементов массами m 1 , m 2 , m 3 происходит по вертикали; через k 1 , k 2 , k 3 , k 4 , k 5 обозначены коэффициенты жесткости линейных упругих элементов. Контур I на рисунке 1 определяет размещение виброзащитного устройства (ВЗУ); объект защиты имеет массу m 3 . Опорная поверхность II вводится для построения более полной схемы: при необходимости k 4 и k 5 , так же как Q i и z k , могут принимать нулевые значения. Запишем выражения для кинетической и потенциальной энергий:
T = -т У 1 +- m 2 у 2 +- m з Уз ;
П = 1 k i ( У 1 - Z 1 ) 2 + 1 к 2 ( У 2 — У 1 ) 2 + 1 к з ( У з — У 2 ) 2 + | к 4^ У 3 - Z 2 ) 2 + | к 5^ У 3 - У 1 ) 2 .
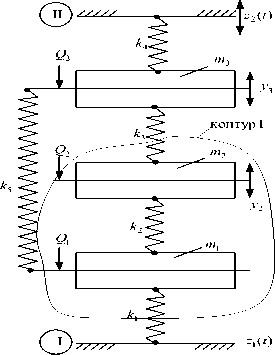
Рисунок 1 – Расчетная схема виброзащитной системы с тремя степенями свободы
Для построения математической модели используется стандартная методика [9, 10] на основе формализма Лагранжа:
т 1 У 1 + У 1( к 1 + к 2 + к 5 ) - к 2 У 2 - к 5 У 3 = Q 1 + к 1 z i ; (3)
m 2 У 2 + У 2 ( к 2 + к 3 ) - к 2 У 1 - к 3 У 3 = Q 2 ;
тзУз + У з ( к з + к 4 + к 5) - к3У 2 - к5У 1 = Q 3 + к4г 2. (5)
Если принять, что z 1 = 0, z 2 = 0, а Q 1 ≠ 0, Q 2 ≠ 0, Q 3 ≠ 0, то связи между переменными y 1 , y 2 , y 3 и Q 1 , Q 2 , Q 3 в операторной форме могут быть представлены в виде следующих выражений [10]:
Используя (6) - (8), можно построить необходимые передаточные функции. Структурная схема системы, соответствующая уравнениям (3) - (5), приведена на рисунке 2.
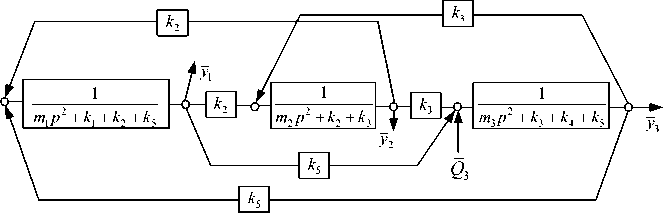
Рисунок 2 – Структурная схема для виброзащитной системы на рисунке 1 при Q 3 ≠ 0
При действии внешних возмущений динамические реакции возникают между объектом защиты m 3 и опорой II , а также между промежуточным инерционным элементом m 1 , ВЗУ и опорной поверхностью I . Динамические реакции будут возникать также и между отдельными элементами системы.
Структура системы (см. рис. 2) состоит из трех парциальных блоков ( mp 2 + kx + k 2), ( m2p 2 + k 2 + k 3), ( mp 2 + k3 + k 4), между которыми имеются упругие межпарциальные связи k 2 , k з , k 4 . В выражениях (6) — (9) соответственно принято, что a j = mxp 2 + kx + k 2 + k 5, a 2 2 = m2p + k 2 + k 3, a 3 3 = m^p + k 3 + k 4 + k; , ax 2 = a 21 = — k 2, а ^3 = а з i = — k; , a 2 з = а з 2 = — k^ . Структурная схема на рисунке 2 отражает наличие в механической колебательной системе прямых и обратных связей, которые формируют определенные структуры, расширяющие представление о возможностях рассмотрения в качестве парциальных образований следующих видов: [ mm ] = апа 22 — a 2 , [ mm ] = a22a 33 — a 23 , [ mm ] = ana 33 — ax 3.
Задачей исследования является разработка метода построения математических моделей в задачах вибрационной защиты, использующего характерные особенности исходных систем, учитывающих специфику формирования динамических взаимодействий между элементами с использованием понятий о динамических жесткостях, квазипружинах и обратных связях.
Оценка динамических свойств системы
Используя выражения (6) — (8), можно получить передаточные функции между входными сигналами в виде внешних силовых возмущений Q , Q , Q и соответствующими выходными сигналами – y 1 , y 2 , y 3 . Координаты y 1 , y 2 , y 3 отражают положение системы в координатах, связанных с неподвижным базисом. В дальнейших рассмотрениях полагается, что передаточные функции отражают связи только между двумя точками, т.е. без совмещения действия одновременно двух и более возмущений. В частности при обозначении действия силового фактора, например Q , в выражении для передаточной функции принимается, что Q 2 = 0, Q 3 = 0 и т.д.
соответственно.
Рассмотрим необходимые соотношения для случая k5 = 0, что предполагает отсутствие в рассматриваемой системе замкнутого контура, (т.е. а13 = а31 = 0), тогда где A = апа22а33
а 11 а 23
а 33 а 21
w,( p ) = Ут = а a ;
Q 3 A 1
= У 2 = — а 11 а 23 .
Q 3 A 1 ;
W 3 ( p ) =
У 3 _ а 11 а 22 а 12
Q 3 A 1
или
A] = ( m^2 + k] + k2 )( m2p2 + k2 + k3 )( m3p2 + k3 + k4 ) —
— ( m3p2 + k3 + k2 ) k 2 — ( m3p2 + k3 + k4 ) k ^ = 0.
Уравнение (13) можно преобразовать и представить в виде
a 33 ( a 11 a 22
a 12 ) a 11 a 23 0
или
a 11 a 223
a 11 a 22 — a 22
= 0 .
В свою очередь (14) определяется как
, 2 , , А ( m^p 2 + k + k 2) k 2 л
( m з p 2 + k з + k 4 ) - —1 27 3 = 0,
[ mm J где [mm2 J = (mxp2 + kx + k2)(m2p2 + k2 + k3) - k2 .
Структурная схема на рисунке 3, с учетом того, что k 5 = 0, может быть преобразована в
б)
в)
несколько приемов, как показано на рисунке 3. а)
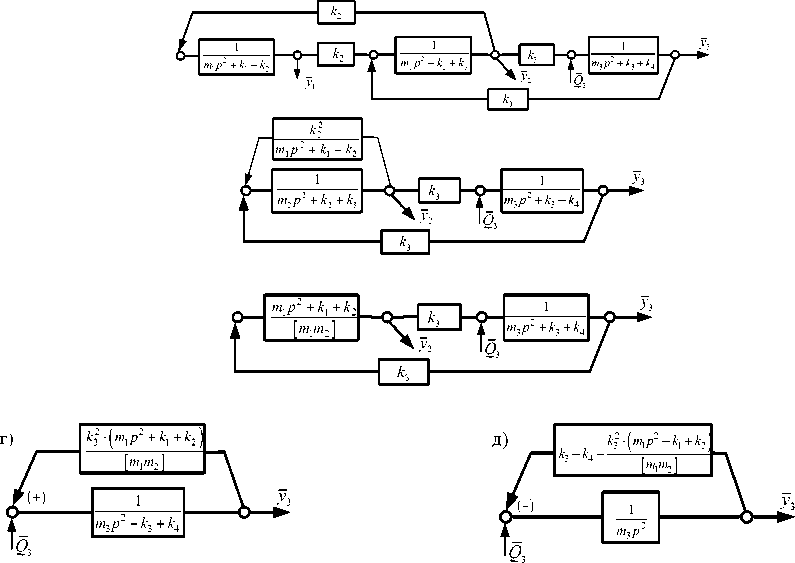
Рисунок 3 – Варианты преобразования структурных схем при выборе объектом виброзащиты массоинерционного элемента m 3 : а – структурная схема системы при k 5 = 0;
б – структурная схема при исключении координат y ; в – структурная схема при выделении парциального блока [ m 1 , m 2 ]; г – структурная схема при выделении квазиупругого элемента или квазипружины; д – структурная схема с выделением объекта защиты m 3
Структурные преобразования исходной схемы на рисунке 3 а показывают, что расчетная схема на рисунке 1 может быть свернута до схемы в виде системы с одной степенью свободы, состоящей из объекта защиты массой m3, двух блоков из упругих элементов (k3 + k4) (рис. 3 д) и квазипружины с динамической жесткостью, определяемой выражением kпр ( P ) = kпр
k2 ( mxp 2 + kx + k 2) k 3 2 ( mxp 2 + kx + k 2)
[ mm J = ( mp 2 + kx + k 2)( m2p 2 + k + k 3) - k 2 "
Динамическая жесткость квазипружины k пр ( р ) зависит от параметров системы k 1 , k 2 , k 3 , k 4 , m 1 , m 2 , а также от частоты внешнего воздействия.
Структурная схема виброзащитной системы на рисунке 3 д может быть названа базовой, в том смысле, что она отражает свойства исходной базовой расчетной схемы, состоящей из объекта защиты m3 и упругих элементов (k3 + k4) и kпр , работающих параллельно. Отметим, что квазипружина, если иметь в виду правила соединения элементов системы между собой, обладает всеми свойствами обычной пружины. Таким образом, базовая расчетная схема виброзащитной системы определяется наличием двух базовых элементов – объекта защиты (массоинерционный элемент m3) и обобщенной пружины с общей динамической жесткостью kпр(р) = k„р = k3 + k4 + kпр = (k3 + k4)[mm2] + k32 [ mm2 J Оценка динамических свойств системы с использованием приведенных параметров жесткости Динамическая жесткость базовой модели k^ (р) определяется параметрами структурного образования [mm2 ], которое можно рассматривать как парциальную систему обобщенного вида. Такая структура в механических колебательных системах с несколькими степенями свободы выполняет те же функции, что обычная парциальная система. Обобщенная парциальная система включает в свой состав обычные системы. Оба вида систем могут находиться одновременно в составе выражений для определения динамических жесткостей квазипружины различного уровня, например, kпр (p) и kпр (p). В рассматриваемом случае на уровне простых парциальных систем, судя по структурной схеме на рисунке 3 а, имеется три парциальных частоты первого уровня, определяемые выражениями „ 2 _ k 1 + k 2 . (19) n1 ; m1 2 k. + k3 (20) n 2 ; m 2 7 k. + k. и2 — 3 4 (21) ^3 . m3 Для обобщенной парциальной системы [m,m2] парциальные частоты будут определяться из решения частотного уравнения mm.p4 + p2 [ mx (k2 + k3) + m2 (kx + k2)] + k.k. + k2k3 + kxk3 — 0 или 4,2/2, 2x , 22 k2 n p + p (nx + n2) + n n2--2— = 0 . mm Динамическая жесткость квазипружины kпр (p), определяемая из выражения (17), имеет два значения частоты внешнего воздействия, когда kпр (p) ^ то, что предполагает появление в исходной системе (или наличие) режимов динамического гашения колебаний. В этих случаях объект защиты m3 будет неподвижным, а его динамическое равновесное состояние будет определяться взаимодействием элементов в обобщенной парциальной системе [mm2 ]. Если ввести в рассмотрение квазипружину второго уровня, определяемую выражением (18), т.е. kпр (p), то можно отметить появление такого динамического свойства, как «обнуление» динамической жесткости. Частоты «обнуления» динамической жесткости определяются из частотного уравнения, получаемого из числителя выражения (18). mxm2p4 + p 2[ mx (k2 + k3) + m2 (kx + k.)] + (kx + k2)(k2 + k3) - k2 + k 2 +--3— (mxp2+ kx + k2) — 0. k3 + k4 1 2 При рассмотрении динамической жесткости квазипружины kпр в системе будут наблю- даться совместные движения элементов m1 и m2, которые можно отнести к самоорганизации, характерной для форм движения в свободных колебаниях. Заключение Таким образом, структурные математические модели позволяют выделять связи, возникающие между отдельными элементами системы, а также между структурными образованиями, которые по своим обобщенным свойствам могут быть названы квазипружинам. Выделяемые структурные образования можно отнести к обобщенным звеньям механических колебательных систем; получение передаточных функций таких звеньев производится на основе применения правил параллельного и последовательного соединения пружин, а также правил учета введения и реализации обратных связей [9, 10]. Используя структурные схемы исходных механических систем, можно определить динамические жесткости системы в соответствующих точках. В частности интерес представляет определение динамических жесткостей всей системы в целом, поскольку «зануление» этой динамической жесткости совпадает с частотой собственных колебаний, что касается динамических жесткостей отдельных фрагментов системы или ее обобщенных звеньев, то определение условий «зануления» динамических жесткостей в частных случаях, связано с проявлениями различных форм самоорганизации движения. Динамические жесткости отдельных элементов и фрагментов системы могут принимать и бесконечно большие значения, что совпадает с проявлениями таких режимов взаимодействия элементов, как динамическое гашение колебаний. Во второй части статьи будут представлены результаты исследований, связанных с детализацией представлений о динамических жесткостях и методах определения последних на основе технологий структурных преобразований. Нумерация формул и рисунков является общей. Библиография отражает ссылки только по материалам второй части статьи.
Список литературы Возможности развития метода преобразования структурных схем в задачах динамики виброзащитных систем (часть I)
- Тарасик В.П. Математическое моделирование технических систем: учебник для вузов. -Минск: ДизайнПРО, 2004. -640 с.
- Хоменко А.П., Елисеев С.В., Ермошенко Ю.В. Системный анализ и математическое моделирование в мехатронике виброзащитных систем. -Иркутск: Изд-во ИрГУПС, 2012. -288 с.
- Коловский М.З. Автоматическое управление виброзащитными системами. -М.: Наука, 1976. -320 с.
- Елисеев С.В. Структурная теория виброзащитных систем. -Новосибирск: Наука, 1978. -212 с.
- Елисеев С.В., Резник Ю.И., Хоменко А.П. и др. Динамический синтез в обобщенных задачах виброзащиты и виброизоляции технических объектов. -Иркутск: Изд-во ИГУ, 2008. -523 с.
- Елисеев С.В., Резник Ю.И., Хоменко А.П. Мехатронные подходы в динамике механических колебательных систем. -Новосибирск: Наука, 2011. -384 с.
- Елисеев С.В., Артюнин А.И., Ермошенко Ю.В. и др. Метод преобразований механических цепей на основе введения в соединения промежуточных устройств; ИрГУПС. -Иркутск, 2014. -68 с. Деп. в ВИНИТИ 14.01.2014 № 19 -В 2014.
- Елисеeв С.В., Московских А.О., Каимов Е.В. Структурные интерпретации механических колебательных систем в теории электрических цепей и теории автоматического управления; ИрГУПС. -Иркутск, 2014. -82 с. Деп. в ВИНИТИ 13.01.2014 № 8 -В 2014.
- Елисеев С.В., Артюнин А.И., Большаков Р.С. Механические цепи в структурных схемах виброзащитных систем. Методика определения динамических реакций//Вестник Всероссийского научно-исследовательского и проектно-конструкторского института электровозостроения. -2015. -№ 1 (69). -С. 93-111.
- Елисеев С.В., Хоменко А.П. Динамическое гашение колебаний. -Новосибирск: Наука, 2014. -357 с.
