Выбор рационального варианта построения комплекса средств автоматизации сложных технических систем

Автор: Васильев Алексей Сергеевич, Аверьянов Алексей Васильевич, Зыкова Светлана Сергеевна
Рубрика: Управление сложными системами
Статья в выпуске: 4, 2021 года.
Бесплатный доступ
Предложен способ повышения надежности функционирования комплекса средств автоматизации сложных технических систем. Способ заключается в выборе рациональной структуры комплекса средств автоматизации с учетом необходимого количества узлов резервирования. В качестве примера проведено сравнительное оценивание различных конфигураций комплекса средств автоматизации управления процессом подготовки и пуска ракет-носителей.
Надежность, резервирование, вероятность безотказной работы, комплекс средств автоматизации
Короткий адрес: https://sciup.org/148323536
IDR: 148323536 | УДК: 004.75 | DOI: 10.18137/RNU.V9187.21.04.P.051
Choosing a rational construction option complex automation tools for complex technical systems
A method of increasing the reliability of the complex of automation tools of a complex technical system is proposed. The method consists in choosing a rational structure of the automation complex, taking into account the required number of redundancy nodes. As an example, a comparative evaluation of various configurations of a complex of automation tools for controlling the process of preparation and launch of launch vehicles was carried out.
Текст научной статьи Выбор рационального варианта построения комплекса средств автоматизации сложных технических систем
Комплексы средств автоматизации (далее – КСА), основную роль в которых играют специализированные вычислительные средства, выполняют задачи по управлению и обработке информации сложных технических систем (далее – СТС), функционирующих в режиме реального времени. В этих условиях необходимо обеспечить минимизацию вероятности возникновения отказа или сбоя в работе систем, готовность их выполнять задачи по целевому назначению при возникновении неисправности каких-либо компонентов, а также удобство их обслуживания (возможность проведения ремонтных и регламентных работ без прекращения функционирования или с минимизацией простоя).
Сущность подхода
Одним из основных способов реализации этих требований является применение структурного резервирования [4], предусматривающее использование избыточных блоков [10] и узлов в структуре КСА. При этом элементы системы [18] соединены постоян-
Васильев Алексей Сергеевич кандидат технических наук, доцент, заместитель начальника кафедры. Военнокосмическая академия имени А.Ф. Можайского, Санкт-Петербург. Сфера научных интересов: информационно-вычислительные системы и технологии, надежность, живучесть. Автор более 30 опубликованных научных работ.
но, перестройки структуры системы не производится, а резервные элементы участвуют в функционировании системы наравне с основными [11].
В целях выбора рационального варианта построения КСА проводится сравнительное оценивание надежности различных конфигураций КСА: без резервирования, двухканальным и трехканальном резервированием. В качестве показателя надежности выбрана вероятность безотказной работы (далее – ВБР) в течение заданного времени.
Пример комплекса средств автоматизации управления
В качестве примера рассмотрим комплекс средств автоматизации управления процессом подготовки и проведения пуска ракет-носителей. Рассматриваемый КСА сложной технической системы должен обладать требуемыми показателями надёжности, точности и быстродействия [15]. ВБР КСА за время рабочего цикла 168 часов определена не менее 0,995, а ВБР за время подготовки и пуска, равное 1,5 часа, – не менее 0,999. Указанные уровни надежности должны обеспечиваться при значениях ВБР, составляющих КСА модулей, представленных в Таблице 1.
В качестве основных элементов КСА рассматриваются:
-
• процессорный модуль;
-
• пульт оператора (далее – ПО);
-
• два устройства гарантированного питания (далее – УГП) ЭВМ;
-
• два устройства ввода-вывода (далее – УВВ);
-
• два шкафа кроссовых (далее – ШК);
-
• комплект кабелей (далее – КК).
Выбор рационального варианта построения комплекса средств автоматизации ...
Таблица 1
Уровни надежности модулей
|
Модуль |
ВБР |
|
|
Р = 168 ч |
Р = 1,5 ч |
|
|
ПО |
0,9998 |
0,999998 |
|
УГП |
0,99995 |
0,9999996 |
|
УВВ |
0,998 |
0,99999 |
|
ШК |
0,999996 |
1 |
|
КК |
0,99955 |
0,99997 |
В таблице отсутствует процессорный модуль. Считается, что его ВБР в течение установленных временных интервалов равна единице.
Используя вышеизложенную информацию, необходимо проверить возможность обеспечения указанных значений ВБР КСА и сравнить надежность одноканальной, двухканальной и трехканальной ее реализаций [5].
При составлении структурной схемы надежности (далее – ССН) КСА считаем [7], что все устройства и модули включены последовательно. ССН для одноканального, двухканального и трехканального КСА представлены на Рисунках 1, 2, 3 соответственно.

Рисунок 1. Структурной схемы надежности одноканального КСА
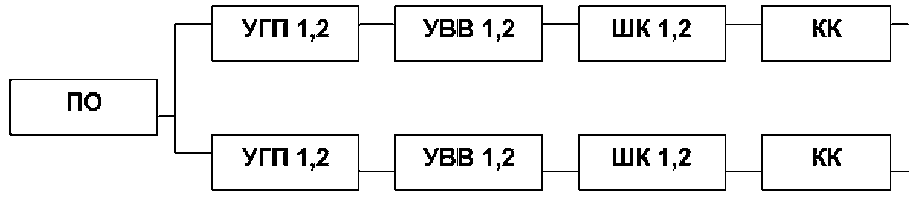
Рисунок 2. Структурной схемы надежности трехканального КСА
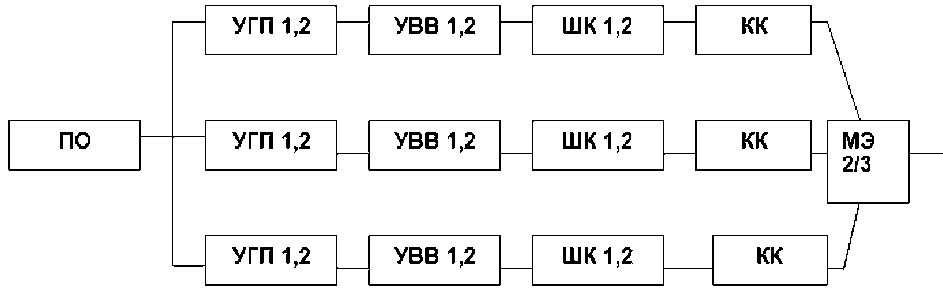
Рисунок 3. Структурной схемы надежности двухканального КСА
ВБР одноканальной КСА рассчитывается по формуле
Р (1 )ксл = Р по Ч Р 2 УГП Ч Р 2уввЧ Р 2ШК Ч Р кк= Р по Ч Р , . (!)
Значения ВБР отдельных устройств и модулей, находящихся в правой части выражения (1), представлены в Таблице 1. В соответствии с формулой (1) для t = 168 ч – Р (1) КСА ≈ 0,99525: для t = 1,5 ч – Р (1) КСА ≈ 0,999947.
ВБР двухканальной КСА рассчитывается по формуле
Р (2) ксл = Р по Ч [! — (! — P 1 П (2)
где P 1 = Р 2 УГП × Р 2 УВВ × Р 2 ШК × Р КК .
В соответствии с формулой (2) для t = 168 ч – Р (2) КСА ≈ 0,99978; для t = 1,5 ч – Р (2) КСА ≈ 0,999998.
В трехканальном КСА сигналы с выходов отдельных каналов поступают на мажоритарный элемент (далее – МЭ) (см. Рисунок 3), который является по своей сути избирательной схемой [6], на выходе которой появляется сигнал при совпадении сигналов от двух из трех резервных каналов. Выход из строя одного из трех каналов приводит к искажению выходного сигнала [17]. Использование мажоритарного способа резервирования позволяет достаточно просто обнаружить неисправный канал.
ВБР трехканальной КСА рассчитывается по формуле
Р (3) ксл = Р по Ч Р мэ Ч P 2 1 Ч (3 — 2 P 1 ), (3)
где Р МЭ – ВБР мажоритарного элемента.
Надежность трехканального КСА при одном отказавшем канале снижается до величины Р ПО × P 2 1 . В КСА процессом подготовки и пуска постоянно требуется поддерживать высокую надежность управления технологическим процессом [12], поэтому при отказе одного из каналов желательно повышать надежность системы в период восстановления до величины Р (1) КСА , а после восстановления отказавшего канала – до первоначальной величины [14].
Предположим, что ВБР мажоритарного элемента равна 1, тогда для t = 168 ч – Р (3)КСА≈ 0,99974; для t = 1,5 ч – Р (3)КСА≈ 0,999998.
Полученные значения ВБР позволяют провести сравнительное оценивание показателей безотказности [9] при различных реализациях КСА. Выигрыш в надежности для t 1 = 168 ч и t 2 = 1,5 ч определяется как отношения
В 2 = Р (2) ксл : Р (1) ксл и в 3 = Р (3) ксл / Р (1) ксл . (4)
Значения отношений В 2 и В 3 представлены в Таблице 2.
Таблица 2
Значения отношений В 2 и В 3
|
Время/Выигрыш |
В 2 |
В 3 |
|
168 ч |
1,00455 |
1,00451 |
|
1,5 ч |
1,00005 |
1,00005 |
Вышеизложенные результаты позволяют сделать следующие выводы.
-
1. Заданные состав, структура КСА, показатели безотказности отдельных устройств и модулей обеспечивают достижение требуемых значений ВБР за установленное время ра-
- Выбор рационального варианта построения комплекса средств автоматизации ...
-
2. Выигрыш в надежности двухканального и трехканального КСА практически одинаковы, что обусловливает нецелесообразность чрезмерной аппаратной избыточности в структуре КСА, то есть использование третьего канала управления нецелесообразно.
-
3. Многоканальная реализация КСА функционирует более эффективно в смысле надежности в течение длительных интервалов времени.
бочего цикла и за установленное время подготовки и пуска РН даже при одноканальном управлении технологическим процессом.
Представленные выводы могут быть использованы на этапе проектирования сложных информационных управляющих систем при выборе рациональной структуры аппаратной части, определении разумных пределов избыточности аппаратных и программных средств.
Следует отметить, что недостатком рассмотренного трехканального КСА (см. Рисунок 3) являются высокие требования, предъявляемые к надежности мажоритарного элемента. Напомним, что ВБР мажоритарного элемента равнялась единице. Эти требования можно значительно снизить, если в систему включить три мажоритарных элемента так, как показано на Рисунке 4.
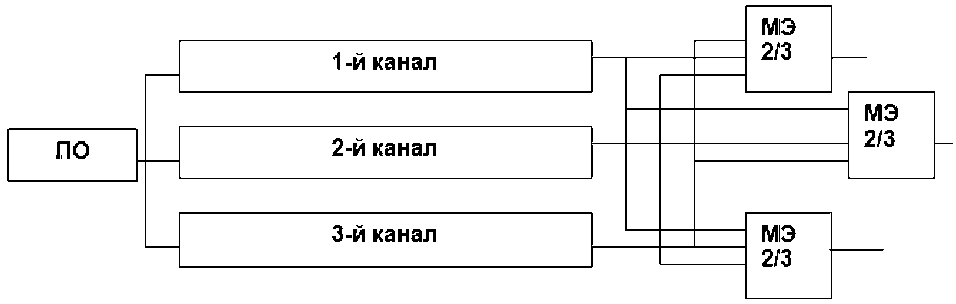
Рисунок. 4. Система с тремя мажоритарными элементами
В этом случае ВБР системы можно определить из следующего выражения:
Р”“^ Р m Ч (3 P 2, -2 P 3, ) Ч [1 - (1 - P мз) 3 ]. (5)
РПМуЭс(т1ь,5 ч) = 0,9999, РМЭ(168 ч) = 0,999, тогда для t = 168 ч – Р (3)КСА≈ 0,99874, Р (3 МЭ)КСА≈ 0,99974;
для t = 1,5 ч – Р (3) КСА ≈ 0,999898, Р (3 МЭ) КСА ≈ 0,999998.
Выигрыш в надежности системы, представленной на Рисунке 4, по сравнению с одноканальной системой (см. Рисунок 1) рассчитывается по формуле
В ", = Р 13 М3)кс/^"„cv (6)
Значения выигрышей В 2 , В 3 , В МЭ 3 , рассчитанных по формулам (4)–(6), для Р МЭ (1,5 ч) = 0,9999 и для Р МЭ (168 ч) = 0,999, представлены в Таблице 3.
Таблица 3
Значения выигрышей В 2 , В 3 , В МЭ
|
Время / Выигрыш |
В 2 |
В 3 |
В МЭ3 |
|
168 ч |
1,00455 |
1,0034 |
1,00451 |
|
1,5 ч |
1,00005 |
0,99995 |
1,00005 |
Из полученных результатов следует, что трехканальный КСА с единственным мажоритарным элементом, имеющим ВБР меньше единицы, менее надежен, чем двухканальный КСА, а на малых интервалах времени функционирования уступает в надежности даже одноканальной системе. Использование в структуре трех мажоритарных элементов позволяет достичь уровня надежности двухканального КСА, что подтверждает нецелесообразность чрезмерной многоканальной реализации КСА [1; 16].
На Рисунке 5 представлены графики изменения выигрыша в надежности многоканальной системы в зависимости от ВБР одного канала.
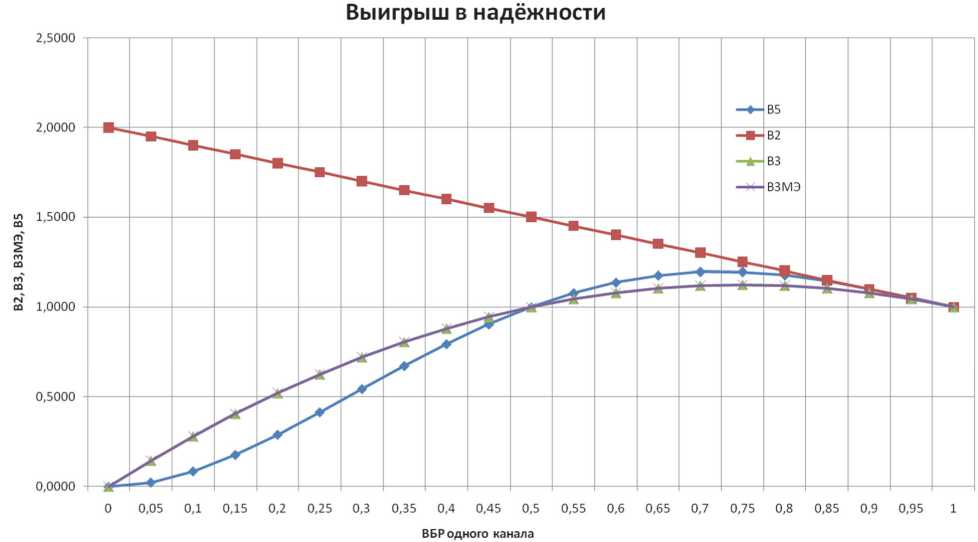
Рисунок 5. Графики изменения выигрыша в надежности многоканальной системы: В2 – выигрыш в надежности двухканальной системы; В3 – выигрыш в надежности трехканальной системы с одним мажоритарным элементом, ВБР которого равна единице; В3МЭ – выигрыш в надежности трехканальной системы с тремя мажоритарными элементами, ВБР которых равна 0,99; В5 – выигрыш в надежности пятиканальной системы с одним мажоритарным элементом, ВБР которого равна единице
Из представленных диаграмм видно, что максимальные выигрыши в надежности пятиканальной и трехканальных систем достигается при ВБР одного канала Р 1 = 0,75 и равны, соответственно, В5 = 1,1953, В3 = 1,1250, В3МЭ = 1,1249, что меньше выигрыша в надежности двухканальной системы, равного В2 = 1,2500. Очевидно, что ВБР Р 1 = 0,75 – недопустимо низкий уровень надежности одного канала, и строить на таких каналах многоканальные КСА нельзя [2].
Выбор рационального варианта построения комплекса средств автоматизации ...
При Р 1 > 0,9 значения выигрышей в надежности многоканальных систем становятся практически одинаковыми. Например, для Р 1 = 0,95 получаем В5 = 1,0514, В3 = 1,0450, В3МЭ = 1,0449, В2 = 1,0500.
Заключение
Из полученных результатов следует, что трехканальные системы, представленные на Рисунках 3 и 4, уступают в надежности двухканальной системе за счет использования в схеме резервирования дополнительного мажоритарного элемента. Таким образом, типовые структуры КСА, обладающие аппаратной и программной избыточностью, нерациональны в смысле многоканальной реализации.
При решении проблемы надежности функционирования таких систем необходимо прежде всего повышать безотказность работы одного канала управления, а не идти по наиболее легкому пути увеличения количества каналов, не соответствующих заданным в технических требованиях уровням надежности.
Достаточность простого дублирования или двухканальной реализации для обеспечения надежного функционирования автоматизированных систем подтверждается строением (морфологией) живых организмов, а именно: симметрией внутренних органов, наличием парных органов, обеспечивающих важнейшие функции организма, – зрение, слух, дыхание и др. [3].
Список литературы Выбор рационального варианта построения комплекса средств автоматизации сложных технических систем
- Аверьянов А.В. Оценивание надежности автоматизированных систем управления подготовкой и проведением пуска космических аппаратов // Известия вузов. Приборостроение. 2009. Т. 52, № 4. С. 62–65.
- Аверьянов А.В., Барановский А.М., Эсаулов К.А. Определение пределов аппаратной избыточности информационных управляющих систем // Известия вузов. Приборостроение. 2014. Т. 57, № 3. С. 23–26.
- Аверьянов А.В., Кузнецов В.В., Калюжный А.В. Оценивание надежности функционирования многоканальной системы на примере ботового комплекса управления малого космического аппарата // Известия вузов. Приборостроение. 2020. Т. 63, № 10. С. 880–887.
- Бабошин В.А., Нечай А.А., Вылегжанин А.Н. Цифровая трансформация телекоммуникационных систем железнодорожной отрасли // Специальная техника и технологии транспорта: сборник научных статей. СПб.: Петергоф, 2021. С. 180–188.
- Баглюк С.И., Нечай А.А. К вопросу о выборе исходных данных при автоматизации тестирования программ // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2020. № 4. С. 103–107.
- Борисов А.А., Краснов С.А., Нечай А.А. Технология блокчейн и проблемы ее применения в различных информационных системах // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2018. № 2. С. 63–67.
- Гладышев А.И., Зимовец А.И., Нечай А.А., Обухов А.В. Применение Big Data для анализа околоземного космического пространства // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2020. № 4. С. 127–134.
- Дружинин Г.В. Надежность автоматизированных производственных систем. 4-е изд., перераб. и доп. М.: Энергоатомиздат, 1986. 480 с.
- Котиков П.Е., Нечай А.А. Репликация данных между серверами баз данных в среде геоинформационных систем // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2015. № 1. С. 88–91.
- Мысливец Е.Г., Пучкова И.А., Нечай А.А., Антонов Д.А. Синтез модели автоматизированной информационной системы радиоэлектронного мониторинга объектов наблюдения на основе логико-алгебраического подхода // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2020. № 4. С. 135–142.
- Нечай А.А. Формирование безопасной информационной среды // Актуальные проблемы современности: наука и общество. 2019. № 4 (25). С. 43–44.
- Нечай А.А., Котиков П.Е. Методика повышения надежности функционирования систем, организованных на перепрограммируемых элементах // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2016. № 1-2. С. 87–89.
- Новиков А.Н., Нечай А.А., Малахов А.В. Математическая модель обоснования вариантов реконфигурации распределенной автоматизированной контрольно-измерительной системы // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2016. № 1-2. С. 56–59.
- Пакулов Н.И., Уханов В.Ф., Чернышов П.Н. Мажоритарный принцип построения надежных узлов и устройств ЦВМ. М.: Советское радио, 1974. 184 с.
- Полянский В.И., Аверьянов А.В., Данилов А.И. Автоматизированные системы управления подготовкой и пуском ракет космического назначения. СПб.: ВКА им. А.Ф. Можайского, 1997. 332 с.
- Широбоков В.В., Нечай А.А. Алгоритм планирования энергосберегающей параллельной обработки информации с учетом информационной важности и времени поступления задач // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2017. № 1. С. 88–93.
- Эсаулов К.А., Яхваров Е.К., Нечай А.А., Березин А.С. Методика интеграции системы управления киберрисками в предпринимательских структурах // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2020. № 2. С. 80–86.
