Взаимодействие гусеничной машины с препятствием

Автор: Холопов В.Н., Лабзин В.А.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технические науки: Процессы и машины агроинженерных систем
Статья в выпуске: 2, 2015 года.
Бесплатный доступ
В статье представлено разделение области функционирования технических средств заготовки лесного сырья на 3 зоны, выполнена классификация лесных препятствий, определена возможность подъёма двухгусеничной машины на вертикальную стенку.
Функционирование, технические средства, лесное сырье, классификация лесных препятствий, гусеницы, тяговое усилие, сцепление, вертикальная стенка
Короткий адрес: https://sciup.org/14084152
IDR: 14084152 | УДК: 630.37:001.891
The tracked vehicle interaction with the obstacle
The division of the functioning field of the technical means for wood raw material harvesting into 3 zones is presented, the classification of forest obstacles is carried out, the opportunity to lift two-track vehicle on the vertical wall is determined in the article.
Текст научной статьи Взаимодействие гусеничной машины с препятствием
-
- тундра, лесотундра и подтаежная зона;
-
- лесная таежная зона;
-
- зона горных лесов.
Цель исследований . Разработать классификацию лесных препятствий и исследовать взаимодействие пораметров двухгусеничной машины на вертикальную стенку подъёма.
Объект и методы исследований . Двухгусеничная машина, принятые допущения, исследование преодоления лесных препятствий.
В зависимости от преимущественных условий эксплуатации лесная машина может быть выполнена горной, болотоходной, плавающей, а также предназначенной для работы в равниннохолмистой местности. Каждая из модификаций лесной машины, предназначенная для функционирования в определённых зонах, должна иметь соответствующие конструктивные особенности, позволяющие ей безопасно выполнять необходимые технологические операции и иметь достаточно высокую проходимость, позволяющую преодолевать встречающиеся препятствия [1].
К характерным условиям функционирования лесной техники во всех трёх зонах относится пересеченная местность, представляющая собой совокупность различных препятствий естественного и искусственного происхождения, ориентированных в различных направлениях и расположенных в случайном порядке.
Препятствия, которые могут быть встречены лесной машиной, могут быть в виде неровностей опорной поверхности (бугры, ямы искусственного и естественного происхождения, овраги), а также в виде пней, поваленных деревьев, камней, кочек и др. Возможная классификация лесных препятствий применительно к указанным трём зонам представлена на рисунке 1.
Одним из препятствий, которые можно встретить во всех трёх зонах, является пороговое препятствие, имеющее в наиболее сложных случаях вертикальную стенку. Частными случаями порогового препятствия являются бугры, кочки, валёжины и т.д. Они не представляют особой трудности для их преодоления, поскольку характеризуются достаточно плавными изменениями углов наклона опорной поверхности к горизонту.
Теоретические исследования возможности преодоления пороговых препятствий проводились как для отдельного колеса, так и для машины в целом.
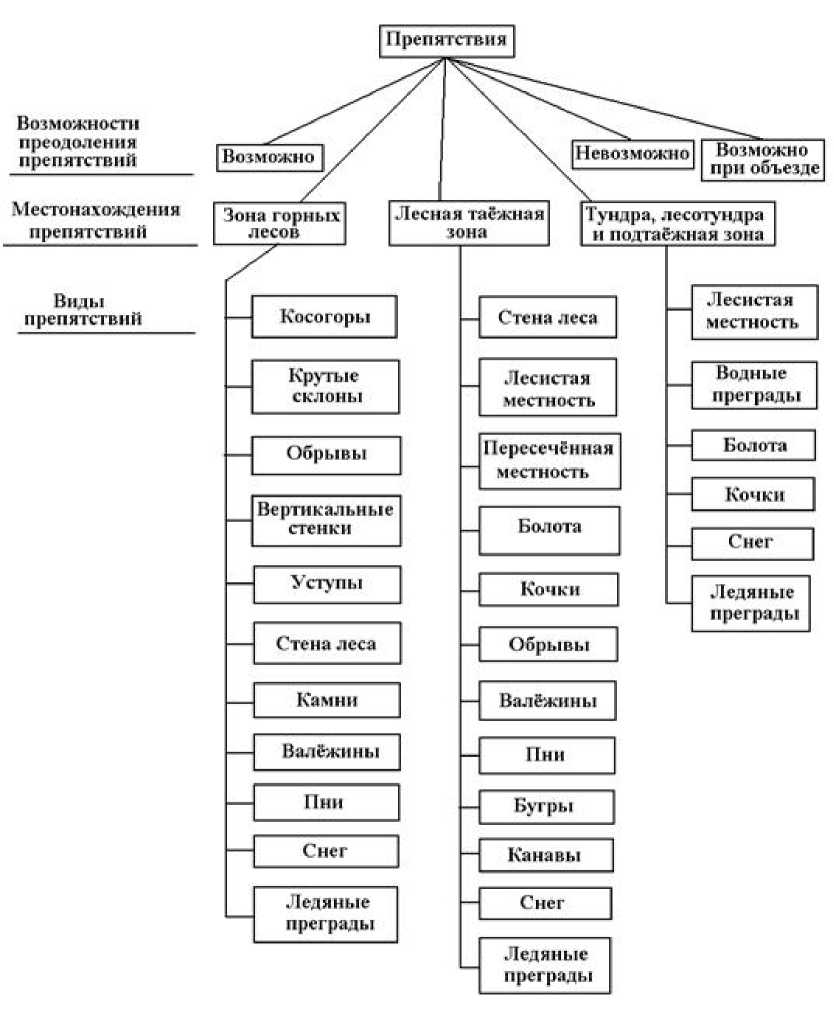
Рис. 1. Классификация лесных препятствий
Изучалось преодоление порогового препятствия неведущим колесом, ведущим колесом, жёстким и эластичным колесом и т.д. При проведении этих исследований полагалось, что колесо и машина находятся на горизонтальной площадке. Было показано, что высота преодолеваемого порогового препятствия зависит от того, ведущее колесо, или ведомое, от того, каков радиус колеса, имеется ли дополнительно приложенная к оси колеса толкающая сила.
Теоретических исследований преодоления пороговых препятствий гусеничной машиной в открытой печати обнаружить не удалось. В известных источниках информации [2–5 и др.] отмечалась лишь технология преодоления такого препятствия, а также рассуждения о влиянии на высоту преодолеваемого порогового препятствия различных конструктивных параметров гусеничной машины и характеристик опорной поверхности. В [5] приведена формула для определения высоты преодолеваемого порогового препятствия танком hэ
2 A - Б
где А – полная длина танка (без пушки);
Б – полная высота танка.
Формула составлена в предположении, что центр тяжести находится посередине длины танка и отстоит от земли на 0,4 его полной высоты, а сцепление гусениц с гребнем эскарпа достаточное.
Таким образом, конкретное влияние конструктивных параметров машины и связи её гусениц с опорной поверхностью в известных исследованиях не определено.
Определим возможность подъёма двухгусеничной машины на вертикальную стенку. Примем следующие допущения: двухгусеничная машина имеет ведущую звёздочку и натяжной каток, являющиеся одновременно и опорными катками (рис. 2).
Вертикальная стенка
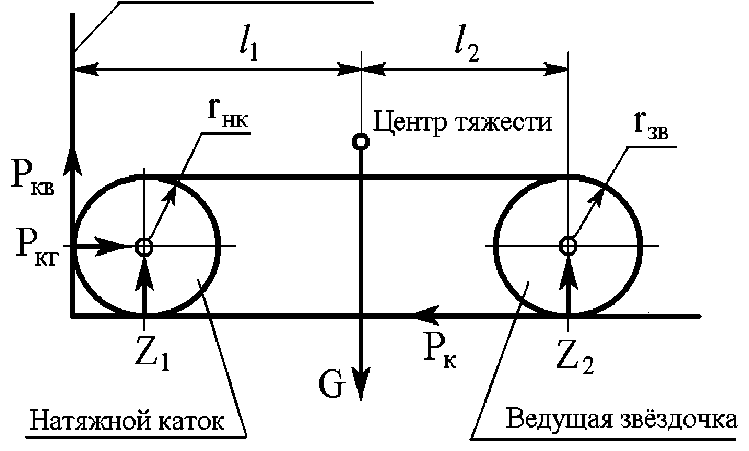
Рис. 2. Схема взаимодействия гусениц двухгусеничной машины с вертикальной стенкой
Составим уравнения равновесия машины.
Сумма моментов действующих сил относительно оси ведущей звёздочки
Ркв (11 + 12 ) + Z1 (l1 + 12 - Гк ) + Ркг (Гк — r.. ) + Рк Гзв — Gl2 = 0. (2)
Сумма проекций действующих сил на вертикальную ось
Р кв + Z 1 + Z 2 - G = 0 . (3)
Сумма проекций на горизонтальную ось
(4) к кг .
В этих уравнениях:
сила сцепления гусеницы с вертикальной стенкой;
кв
Z i — нормальная реакция опорной поверхности на натяжной каток;
Z 2 — нормальная реакция опорной поверхности на ведущую звёздочку;
-
нормальная реакция вертикальной стенки на натяжной каток;
кг
-
тяговое усилие гусеницы относительно опорной поверхности;
к
G — вес машины.
Кроме вышеуказанных, имеют место следующие уравнения:
Р к = Z 2 ф г ; Р кв = I- ф в , (5)
где % - коэффициент сцепления гусеницы с горизонтальной опорной поверхностью;
-
% - коэффициент сцепления гусеницы с вертикальной стенкой.
Начало подъёма машины на вертикальную стенку характеризуется нулевым значением нормальной реакции опорной поверхности на натяжной каток. Уравнение (2) принимает тогда следующий вид:
Ре (li +12 ) + P(r^ — Г в) + Рк r, — Gl2 = 0, кв кг нк зв к зв а уравнение (3)
Ркв + Z2 - G = 0.
С учётом уравнений (4), (5), (7) уравнение (6) после преобразований принимает следующий вид:
l2
Ф в ( l 1 + 1 2 )+ Гнк — Ф el 2 = 0 .
Ф г
Пусть rm = ГзвКнк, где к,. = нК - коэффициент, определяющий соотношение радиусов натяжного катка к. и веду-зв щей звёздочки rзв гусеницы. Тогда l (10)
Ф в ( l1 + 1 2 )+ ГзвКнк -Ф в1 2 = 0 ,
Ф г или
ФвФгl1 + ГзвКнкФг - 12 = 0• (11)
Коэффициент сцепления гусеницы относительно вертикальной стенки в общем случае не равен коэффициенту сцепления гусеницы с горизонтальной опорной поверхностью. Введём коэффициент , определяющий соотношение коэффициентов сцепления относительно вертикальной ср стенки и горизонтальной опорной поверхности.
к Ф' в ;
ср Фг '
Ф в = Кср Ф г •
Подставим значение коэффициента сцепления относительно вертикальной стенки из (12) в (11).
К сvk Фг + Г3 КнФг - ^ = 0 • ср 1 г зв нк г 2
Решим уравнение (13) и определим минимальное значение коэффициента сцепления относительно горизонтальной поверхности, при котором возможен подъём передней части гусеничной машины на вертикальную стенку. Поскольку коэффициент сцепления не может быть отрицательным, решение уравнения имеет вид
Ф г
- ГзвКнк + 4ГзвКНк + 4 Ксрl11 2
2 к ср l 1
Разделим числитель и знаменатель на l 1 и получим безразмерное уравнение, определяющее минимальное значение коэффициента сцепления гусеницы с горизонтальной опорной поверхностью, обеспечивающее подъём натяжного катка на вертикальную стенку.
—
Ф г
ГКнк +л !Гз 2 к 2К + 4 Кс l 2 , зв нк зв нк ср ,
2 к ср
здесь
Г зв
r зв l 2
I ’ 12 = I • l1 l1
Если коэффициенты к и к равны единице, то
Фг = - 0 ,5r„ + 7 0 . 25 r 2 + 4 . г зв зв 2
Проанализируем уравнение (15).
График, представленный на рисунке 3 и построенный при к ср = [0,5; 1,0; 1,5], Г зв = 0,1, показывает, что минимально необходимый для подъёма на вертикальную стенку передней части гусеницы (натяжного катка) коэффициент сцепления гусеницы с горизонтальной поверхностью уменьшается при уменьшении отношения расстояния от центра тяжести гусеничной машины до оси ведущей звёздочки к расстоянию от центра тяжести машины до оси натяжного катка. Другими словами, чем ближе расположен центр тяжести машины к оси ведущей звёздочки, тем минимально необходимый коэффициент сцепления гусеницы с горизонтальной поверхностью будет меньше. Необходимый коэффициент сцепления уменьшается и при увеличении радиуса натяжного катка в сравнении с радиусом ведущей звёздочки, другими словами, с увеличением расстояния от оси натяжного катка до горизонтальной опорной поверхности.
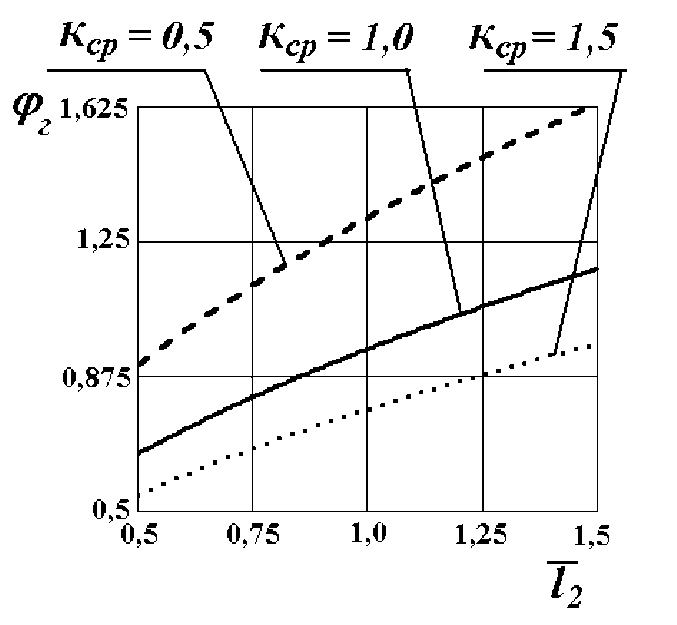
Рис. 3. Зависимости минимального значения коэффициента сцепления гусеничной машины с горизонтальной поверхностью
График, приведенный на рисунке 4 и построенный при к нк = [0,5; 1,0; 1,5], Г зв = 0,1 показывает, что минимально необходимый для подъёма на вертикальную стенку передней части гусеницы (натяжного катка) коэффициент сцепления гусеницы с горизонтальной поверхностью существенно зависит от соотношения коэффициентов сцепления гусеницы с горизонтальной и вертикальной поверхностями. Чем больше коэффициент сцепления гусеницы с вертикальной стенкой к ср > 1, тем минимально необходимый для подъёма на вертикальную стенку натяжного катка коэффициент сцепления с горизонтальной поверхностью будет меньше.
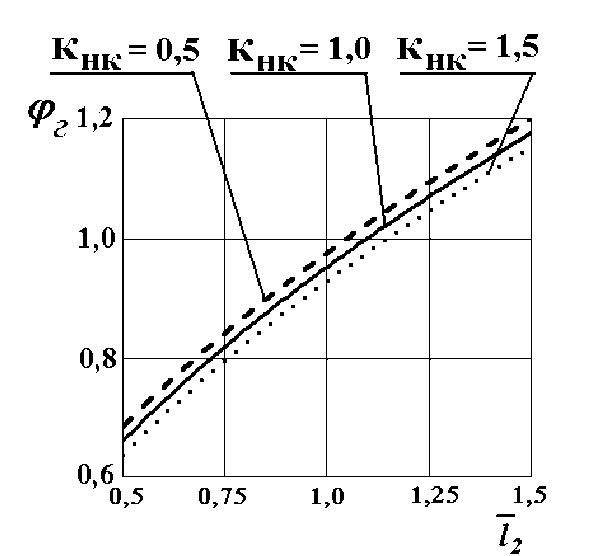
Рис. 4. Зависимости минимального значения коэффициента сцепления гусеничной машины с горизонтальной поверхностью
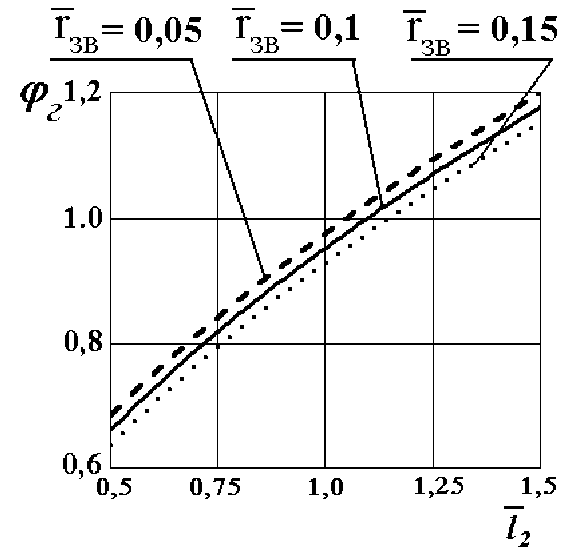
Рис. 5. Зависимости минимального значения коэффициента сцепления гусеничной машины с горизонтальной поверхностью
График, приведенный на рисунке 5 и построенный при Г зв = [0,05; 0,1; 0,15],к ср = 1, к нк = 1 , показывает, что уменьшение минимально необходимого коэффициента сцепления гусеницы с горизонтальной поверхностью обеспечивает увеличение радиуса ведущей звёздочки.
Выводы. С подъёмом передней части гусеничной машины на вертикальную стенку увеличивается угол наклона машины, при этом уменьшаются необходимые для этого подъёма тяговые усилия гусениц.
При определённых конструктивных параметрах гусеничной машины и реальных коэффициентах сцепления гусениц подъём на вертикальную стенку передней части гусениц возможен.
