Взаимодействие интеллектуальных робототехнических систем

Автор: Керимов Тимур Александрович, Решетников Андрей Геннадьевич, Николаева Алена Валериановна, Повидало Илья Сергеевич, Ноздрачев Андрей Владимирович, Ульянов Сергей Викторович
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 1, 2015 года.
Бесплатный доступ
В статье рассматриваются варианты взаимодействия трех робототехнических систем. В качестве объектов управления выступают: робот-бармен, тележка с манипулятором и робот - перевернутый маятник. Рассматривается вариант взаимодействия робота - перевернутого маятника с роботом-барменом, а также перевернутого маятника и тележки с манипулятором.
Коллектив роботов, мультиагентная система, интеллектуальное управление, нечеткий регулятор, распознавание образов
Короткий адрес: https://sciup.org/14122622
IDR: 14122622
Interaction of intelligent robotic systems
In this article ways of interaction of three robotic systems are considered. Robot-barman, cart with manipulator and inverted pendulum are treated as control objects. Interaction of inverted pendulum with robot-barman and inverted pendulum with manipulator cart is considered.
Текст научной статьи Взаимодействие интеллектуальных робототехнических систем
INTERACTION OF INTELLIGENT ROBOTIC SYSTEMS
Kerimov Timur1, Reshetnikov Andrey2,Nikolayeva Alyona3, Povidalo Ilya4, Nozdrachev Andrey5, Ulyanov Sergey6
1PhD student;
Dubna International University of Nature, Society and Man,
Institute of system analysis and management;
141980, Dubna, Moscow reg., Universitetskaya str., 19;
2PhD student;
Dubna International University of Nature, Society and Man,
Institute of system analysis and management;
141980, Dubna, Moscow reg., Universitetskaya str., 19;
2PhD student;
Dubna International University of Nature, Society and Man,
Institute of system analysis and management;
141980, Dubna, Moscow reg., Universitetskaya str., 19;
2PhD student;
Dubna International University of Nature, Society and Man,
Institute of system analysis and management;
141980, Dubna, Moscow reg., Universitetskaya str., 19;
-
2PhD student;
Dubna International University of Nature, Society and Man,
Institute of system analysis and management;
-
3Doctor of Science in Physics and Mathematics, professor;
Dubna International University of Nature, Society, and Man,
Institute of system analysis and management;
Введение
Одной из ключевых задач современной робототехнике является развитие технологий взаимодействия робототехнических систем. Современные подходы в решении данной задачи основываются на теории многоагентных систем [1] и теории роевого искусственного интеллекта [2]. Многоагентная система способна решать сложные динамические задачи по выполнению совместной работы, которая не могла бы выполняться каждым элементом системы в отдельности в разнообразных средах без внешнего управления, контроля или координации. Речь идет о сети слабо связанных между собой роботов, совместно работающих в целях решения задач, которые выходят за рамки индивидуальных возможностей. Различные узлы подобной системы, как правило, имеют различный уровень интеллектуализации (знания, алгоритмы, вычислительные базисы) и разные информационные ресурсы при проектировании. Каждый узел должен быть способен модифицировать свое поведение в зависимости от обстоятельств, а также планировать свои стратегии коммуникации и кооперации с другими узлами. Здесь показателями уровня кооперации являются: характер распределения задач, объединение различных информационных ресурсов и, конечно, возможность решения общей проблемы в заданное время.
Часто проводятся принципиальные различия между распределенным и децентрализованным искусственным интеллектом (рис. 1). Идеология распределенного решения задач предполагает главным образом разделение знаний и ресурсов между агентами и, в меньшей степени, распределение управления и властных полномочий; как правило, здесь постулируется наличие единого органа управления, обеспечивающего принятие решений в критических (конфликтных) ситуациях. Исходным объектом исследования является общая сложная проблема, для решения которой формируется группа агентов, строится общая концептуальная модель и вводятся глобальные критерии достижения цели.
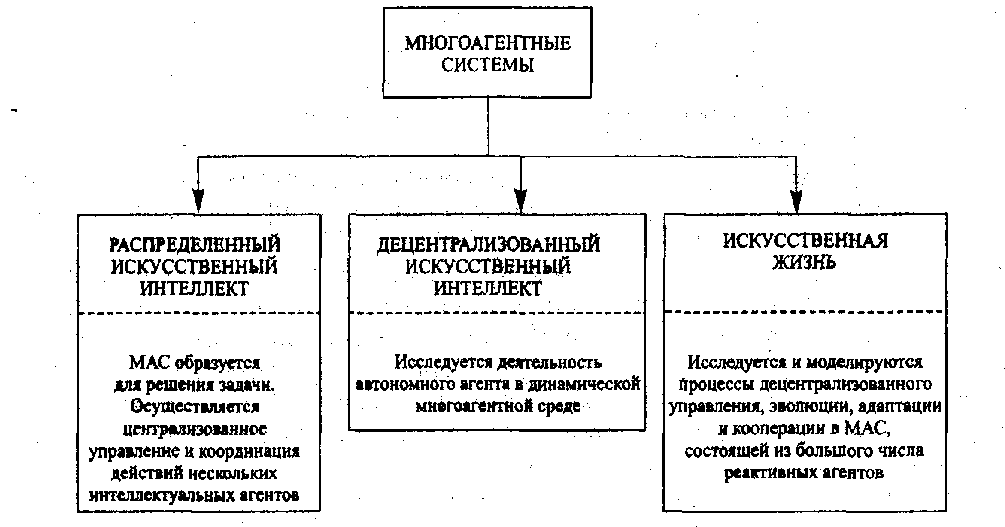
Рис. 1. Классификация многоагентных систем [1]
В полностью децентрализованных системах управление происходит только за счет локальных взаимодействий между агентами. Здесь базовым объектом исследования оказывается уже не распределенное решение некоторой общей задачи, а деятельность автономного агента в динамическом многоагентном мире (а также координация деятельности различных агентов). При этом наряду с распределенными знаниями и ресурсами, описываются локальные задачи отдельных агентов, решаемые на базе локальных концептуальных моделей и локальных критериев.
Для возможности демонстрации взаимодействия были спроектированы макеты управления. Системы управления макетов функционируют на основе нейросетевых нечетких регуляторов разработанных на основе технологии, представленной в [3, 4, 5].
Рассмотрим кратко каждый объект управления.
Объекты управления
Перевернутый маятник. Данная система управления представляет собой динамически-неустой-чивый мобильный объект. Разработанная система интеллектуального управления позволяет роботу свободно перемещаться по различным поверхностям, таким как паркет, асфальт, линолеум, стол, а также дополнительно ставить на робота объекты различной тяжести, например, бокал, телефон и т.п.
Для возможности определения положения этой системы в пространстве используется система инфракрасных «маячков». На четыре угла корпуса робота установлены инфракрасные диоды. Отслеживая камерой двухмерные координаты светодиодов, и, зная точные расстояние между ними, можно вычислить расстояние и положение робота в трехмерном пространстве.
На рис. 2 представлена трехмерная модель перевернутого маятника.
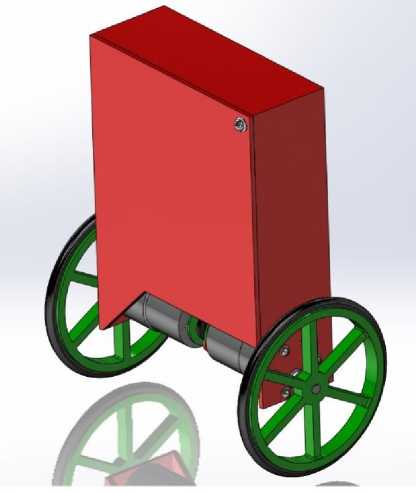
Рис. 2. Трехмерная модель перевернутого маятника
Тележка с манипулятором. Данный объект представляет собой мобильную платформу с установленным на нее манипулятором с тремя степенями свободы. Также, для возможности ориентации в пространстве, на робот установлены две камеры: цветная Kinect и инфракрасная Wiimote . Для распознавания объектов взаимодействия робот использует систему распознавания образов, работающую в среде OpenCV . Система может свободно перемещаться в пространстве, распознавать различные объекты и использовать манипулятор для взаимодействия с ними.
Модель тележки представлена на рис. 3.
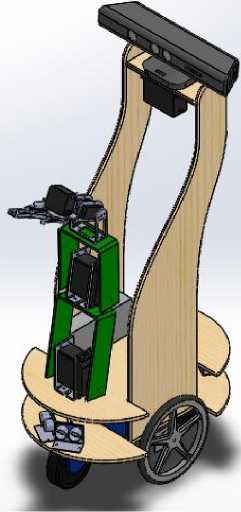
Рис. 3. Трехмерная модель тележки с манипулятором
Робот-бармен. Данный робот представляет собой манипулятор с четырьмя степенями свободы. Робот оснащен камерой, которая охватывает обзором поле рядом с манипулятором и системой распознавания контуров. Вместо захвата к манипулятору подведена трубка с жидкостью, которая хранится в бачке. Робот способен распознавать контуры емкостей, размещенных в рабочей области, и наполнять их какой-либо жидкостью.
На рис. 4 представлена трехмерная модель стационарного манипулятора.
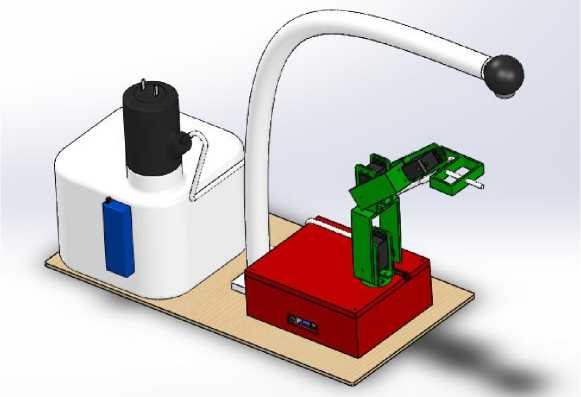
Рис. 4. Трехмерная модель робота-бармена
Далее рассмотрим реализованные типы взаимодействия.
Удаленная связь между роботами
Для возможности реализации связи между роботами был реализован беспроводной интерфейс на основе технологии Bluetooth . Беспроводные приемо-передатчики установлены на каждую из робототехнических систем (рис. 5).

Рис. 5. Использование макетами технологии Bluetooth
Профиль соединения представляет собой последовательный порт. В процессе работы системы обмениваются между собой простейшими командами, такими как «двигайся вперед», «повернись налево», «повернись направо», «остановись», закодированными в символьном виде.
Дистанционная настройка с использованием «Оптимизатора Баз Знаний»
«Оптимизатор Баз Знаний» является инструментарием для разработки робастных баз знаний на основе решения одной из алгоритмически трудно решаемой задачи теории искусственного интеллекта - извлечения, обработки и формирования объективных знаний без использования экспертных оценок. В данном оптимизаторе используются три генетических алгоритма, которые позволяют спроектировать оптимальную структуру нечеткого регулятора, аппроксимирующего обучающий сигнал с требуемой ошибкой. Подробнее функции оптимизатора описаны в [3, 4, 5]. Одной из важных особенностей ОБЗ является дистанционная настройка объекта управления (рис. 6), когда интеллектуальная система управления настраивается с использованием самого объекта, независимо от его местонахождения, через беспроводную связь. Применение данной технологии, на примере робота-перевернутого маятника также рассматривается в [3-7].
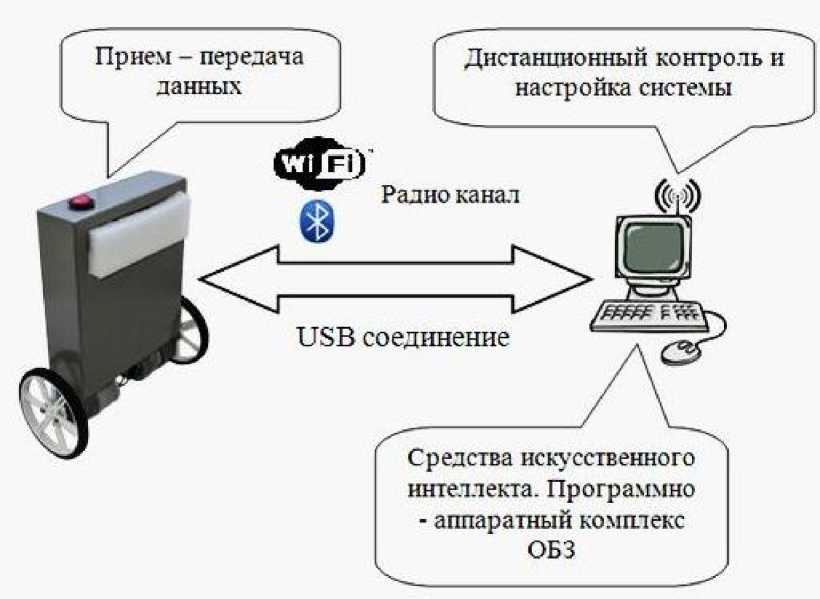
Рис. 6. Схема соединения настраиваемого устройства и ОБЗ
Технология беспроводной настройки также была применена и роботу-тележке с манипулятором. Здесь интеллектуальная система управления используется для быстрого и точного перемещения к объекту распознавания, а ошибкой является отклонение от прямолинейного курса в условных единицах.
Взаимодействие перевернутого маятника и робота -бармена
На робот-перевернутый маятник устанавливается бокал, который является объектом распознавания для стационарного манипулятора. Перевернутый маятник определяет свое положение относительно робота-бармена с помощью инфракрасной камеры и «маячков» и, когда подается соответствующая команда, меняет свое местоположение и перемещается к манипулятору. Алгоритм взаимодействия представлен на рис. 7.
Когда перевернутый маятник оказывается в зоне видимости стационарного манипулятора (рис. 8), система распознавания определяет местоположение бокала и отправляет команду манипулятору наполнить его жидкостью (рис. 9).
Такое взаимодействие является типовым и его применение возможно в целом спектре задач. Кроме очевидных возможностей автоматизации кафе и баров, также возможна автоматизация множества производственных задач, таких как погрузка-разгрузка контейнеров, сортировка и т.п.
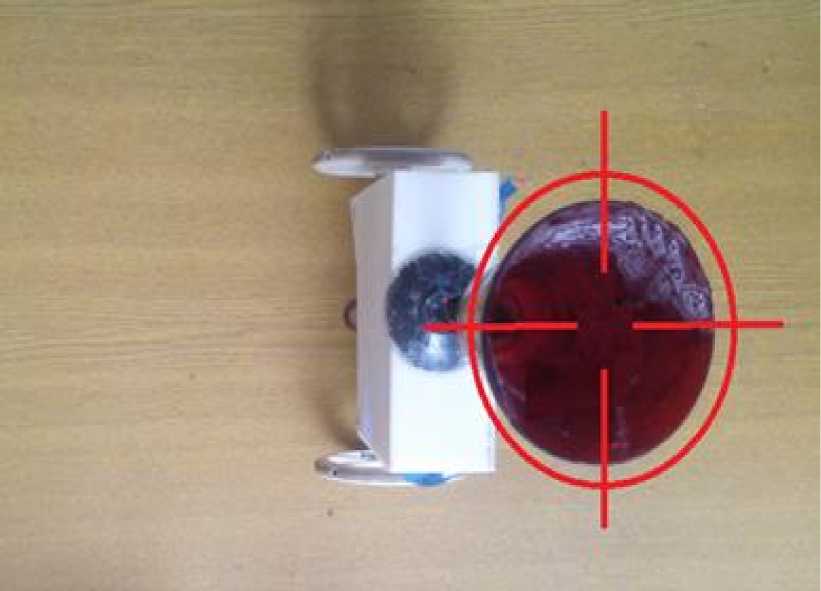
Рис. 8. Перевернутый маятник с бокалом в области видимости робота-бармена
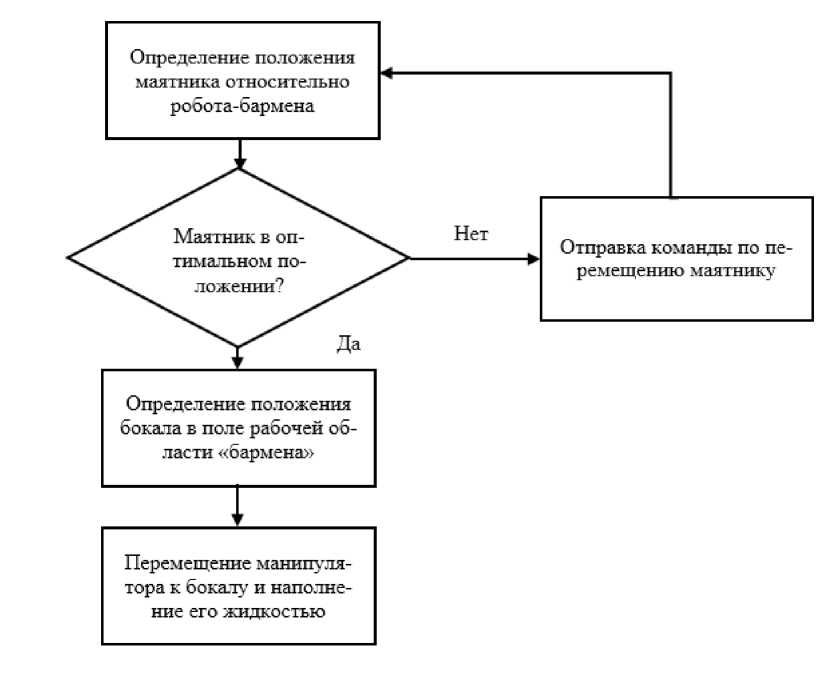
Маятник в оп тимальном по-
Нет ------►
Отправка команды по перемещению маятнику
Определение положения бокала в поле рабочей области «бармена»
Перемещение манипулятора к бокалу и наполнение его жидкостью
Определение положения маятника относительно робота-бармена
Рис. 7. Алгоритм взаимодействия перевернутого маятника и робота-бармена
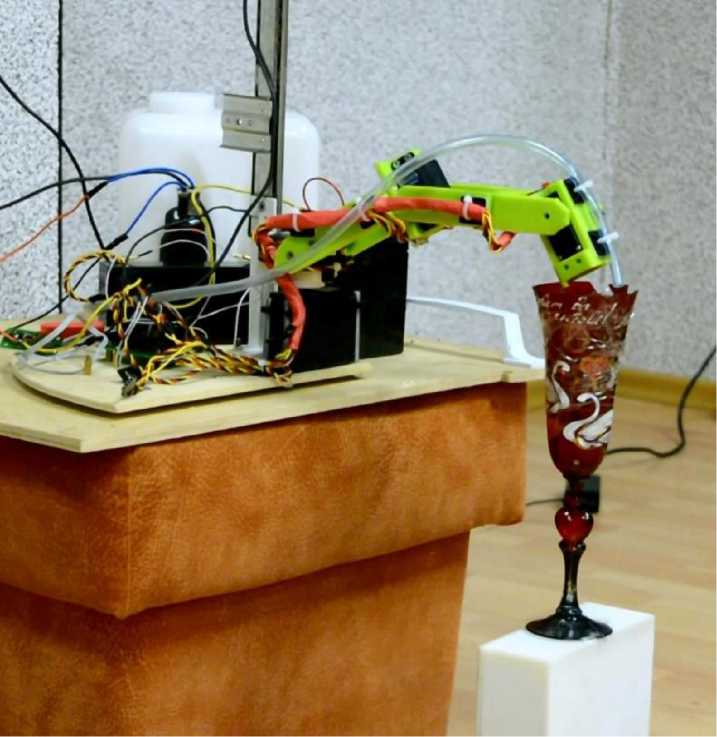
Рис. 9. Робот-бармен наливает жидкость в бокал, установленный на перевернутом маятнике
Взаимодействие перевернутого маятника и тележки с манипулятором
На перевернутый маятник также устанавливается бокал. Тележка с манипулятором имеет инфракрасную камеру, которая определяет относительное положение перевернутого маятника и начинает к нему движение по прямой. Команда на сближение также отправляется перевернутому маятнику. После сближения тележка, с помощью камеры Kinect и системы распознавания, определяет бокал и его местонахождение, после чего отправляется команда манипулятору, который выполняет захват объекта.
На рис. 10 представлен алгоритм взаимодействия тележки и перевернутого маятника. Сначала тележка находит в зоне видимости перевернутый маятник и определяет его положение. Если маятник повернут, то ему отправляется команда на разворот. Если маятник стоит ровно, то начинается взаимное движение навстречу. Когда дистанция становится оптимальна, в работу включается камера Kinect и происходит распознавание бокала, установленного на маятник. После распознавания бокала отправляются координаты и команда манипулятору на захват бокала.
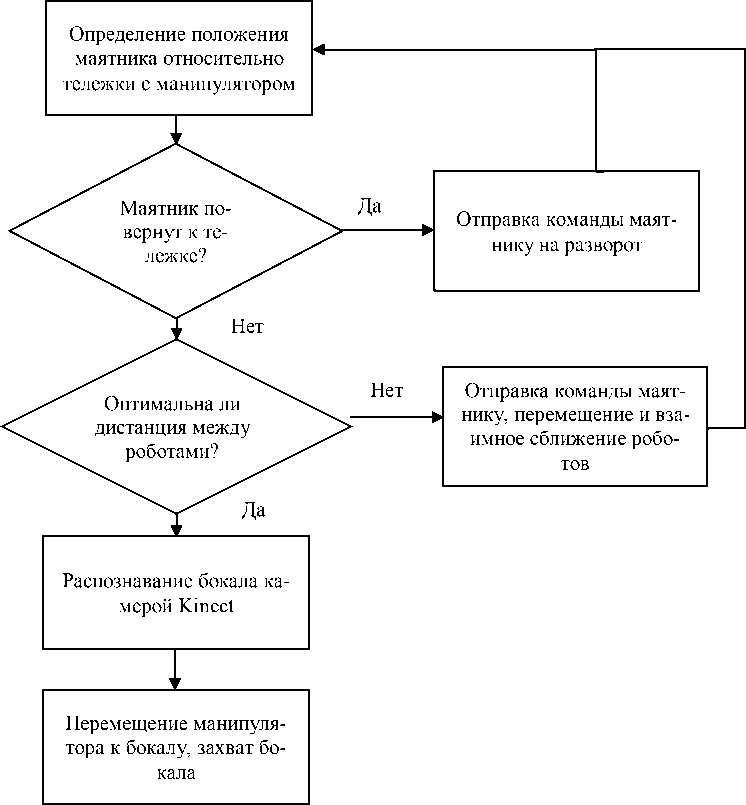
Рис. 10. Алгоритм взаимодействия тележки с манипулятором и перевернутого маятника
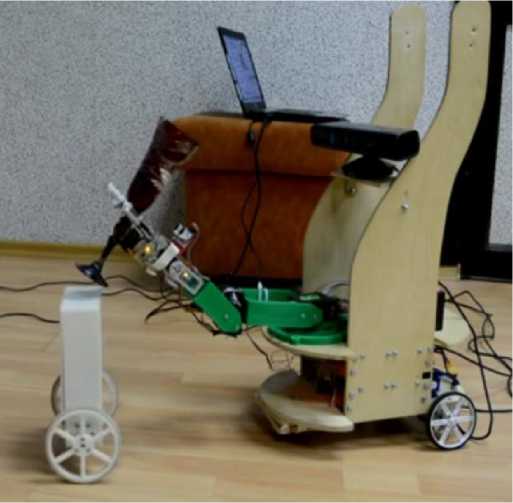
Рис. 11. Тележка с манипулятором выполняет захват бокала с перевернутого маятника
Выводы
Развитие технологий проектирования взаимодействия агентов в многоагентных системах представляет как практический, так и научный интерес. Для возможности реализации таких систем в реальной среде необходимо, чтобы каждый агент имел встроенную интеллектуальную систему управления, т.к. при взаимодействии систем существует множество неучтенных параметров и прочих непредвиденных ситуаций, которые сильно влияют на результат такого взаимодействия. Рассмотренная в статье возможность использования интеллектуальной дистанционной настройки показала свою применимость для такого рода систем.
Разработанные варианты взаимодействия показывают возможности применения таких систем в широком спектре задач, таких как автоматизация складов и производств, автоматические заведения общественного питания, ликвидация последствий чрезвычайных происшествий и т.п. Главной особенностью многоагентной системы является синергетический эффект, возникающий от объединения нескольких робототехнических систем, когда результат взаимодействия намного превышает возможности каждого из роботов в отдельности.
Список литературы Взаимодействие интеллектуальных робототехнических систем
- Тарасов В.Б. От многоагентных систем к интеллектуальным организациям. - М.: Эдиториал УРСС, 2002. - С. 352.
- EDN: ZQQRPP
- Лебедев Б.К., Лебедев В.Б. Планирование на основе роевого интеллекта и генетической эволюции // Известия Южного федерального университета. - 2009. - №4. - Том 93.
- EDN: KUWJET
- Керимов Т. А., Решетников А. Г., Ульянов С. В. Интеллектуальное робастное управление динамически неустойчивым объектом. Ч.1: Удаленная настройка баз знаний на технологии мягких вычислений // Системный анализ в науке и образовании: электрон. науч. журнал. - Дубна, 2013. - № 4. [Электронный ресурс]. URL: http://sanse.ru/download/191.
- Керимов Т. А., Решетников А. Г., Ульянов С. В. Интеллектуальное робастное управление динамически неустойчивым объектом. Ч.2: Технологии квантовых вычислений // Системный анализ в науке и образовании: электрон. науч. журнал. - Дубна, 2013. - № 4. [Электронный ресурс]. URL: http://sanse.ru/download/192.
- Ульянов С.В., Решетников А.Г., Керимов Т.А. Дистанционная настройка базы знаний для интеллектуального управления автономным роботом на основе оптимизатора баз знаний. Ч1: технологии мягких вычислений // Системный анализ в науке и образовании: электрон. науч. журнал. - Дубна, 2013. - № 1. [Электронный ресурс]. URL: http://www.sanse.ru/download/156.
- Ульянов С.В., Албу В.А., Керимов Т.А., Решетников А.Г., Бархатова И.А. Программная поддержка дистанционной настройки баз знаний интеллектуальных регуляторов на технологиях квантовых мягких вычислений // Государственная регистрация программы для ЭВМ №2014618018, 07.08.2014.
- Ульянов С.В., Албу В.А., Керимов Т.А., Решетников А.Г., Бархатова И.А. Программная поддержка интеллектуальных регуляторов на основе технологий мягких и квантовых вычислений // Государственная регистрация программы для ЭВМ № 2014615608, 29.05.2014.
