Задача оптимального измерения с учетом резонансов: алгоритм программы и вычислительный эксперимент

Автор: Келлер Алевтина Викторовна, Захарова Елена Вячеславовна
Рубрика: Математическое моделирование
Статья в выпуске: 27 (286), 2012 года.
Бесплатный доступ
В статье описана программа, реализующая алгоритм численного метода решения задачи оптимального измерения с учетом резонансов - задачи восстановления динамически искаженного сигнала с учетом инерционности измерительного устройства и его механических резонансов, решаемой с использованием методов теории оптимального управления. Основной идеей алгоритма численного решения является представление компонент измерения тригонометрическими полиномами, которое позволяет свести задачу оптимального управления к задаче выпуклого программирования относительно неизвестных коэффициентов многочленов. Использование стандартных методов, например, градиентных, при решении задачи выпуклого программирования, в силу сложности функционала качества, приводит к неудовлетворительным результатам. Поэтому предлагается иной, более простой метод, который вместе с тем более трудоемок. В статье представлен ряд решений, позволяющих повысить скорость вычислений, блок-схема основной процедуры программы, написанной на языке С++. Для конкретной модели датчика приводятся результаты вычислительного эксперимента.
Задача оптимального измерения, оптимальное управление, системы леонтьевского типа, численное решение, алгоритм программы
Короткий адрес: https://sciup.org/147159152
IDR: 147159152 | УДК: 517.9
The problem of optimal measurement of considering resonances: the program algorithm and computer experiment
This article describes a program that implements the algorithm of the numerical method for solving the problem of optimal measurement taking into account resonances - the problem of recovering dynamically distorted signal, taking into account the inertia of the measuring device and its mechanical resonances to be solved by using methods of optimal control theory. The basic idea behind the algorithm is to represent the numerical solution of the component measuring trigonometric polynomials, which reduces the problem of optimal control to the problem of convex programming in the unknown coefficients of polynomials. Using standard methods, such as gradient, in solving a convex programming problem, the complexity of the functional quality, leading to unsatisfactory results. It is therefore proposed a different, simpler method, which, together with the more laborious. This paper presents a number of solutions to improve computing speed, a block diagram of the basic procedure of a program written in C + +, and the results of computer simulation models for a specific sensor.
Текст научной статьи Задача оптимального измерения с учетом резонансов: алгоритм программы и вычислительный эксперимент
Динамические измерения приобретают все большее распространение в технике и научных исследованиях. Изменение требований к результатам измерений является следствием выдвигаемых требований к качеству испытаний и эффективности производства. Так, одной из наиболее значимых в теории динамических измерений является проблема восстановления измеряемого сигнала. Отметим, что эта задача математически некорректна, поэтому для ее решения А.Л. Шестаковым и его учениками были предложены технически обоснованные гипотезы [1 – 3], решения которых были ≪ воплощены в металл ≫ . Затем А.Л. Шестаковым и Г.А. Свиридюком впервые для решения задачи восстановления динамически искаженого сигнала было предложено использовать методы теории оптимального управления [4], а полученную задачу называть задачей оптимального измерения . Полученная математическая модель – модель Шестакова-Свиридюка – позволила начать численные исследования задачи оптимального измерения [5, 6].
Однако искажение измеряемого сигнала часто случается не только из-за механической инерционности ИУ, но и в следствие механических же резонансов. В реальной ситуации в ИУ встраиваются фильтры, которые ≪ вырезают ≫ резонирующие частоты измеряемого сигнала. Иногда эти фильтры тоже резонируют, но уже на другие частоты, поэтому устанавливают дополнительные фильтры, которые устраняют возникшие резонансные частоты и т.д. В [7] А.Л. Шестаковым и Г.А. Свиридюком предложена модель оптимального измерения, где измерительное устройство обладает не только механической инерцией, но и резонансами. Итак, рассмотрим модель Шестакова – Свиридюка с учетом резонансов.
Пусть № = {x G L2((0,t), Rn : x 6 L2((0,t), Rn)} - пространство состояний, U = {u G L2((0,t), Rn) : u(p+1) G L2((0,t), Rn)} - пространство измерений и Y = C[№] - пространство наблюдений при некотором фиксированном т G R .. Выделим в U замкнутое и выпуклое подмножество U∂ – множество допустимых измерений. Требуется найти оптимальное измерение v G Ud почти всюду на (0,т), удовлетворяющую системе леонтьевского типа
Lx = Mx + Du(1)
y = Nx(2)
при начальных условиях Шоуолтера – Сидорова
[(^L - M)-1 L]p+1 (x(0) - xo) = O, минимизирующую значение функционала
-
1 Tll 112 P+1 T
J(v) = min J(u) = min u ∈ U ∂ u ∈ U ∂
E / | s“ ( t ) - y 0,q' t ) dt + E /(F q u (q )W,u (q) ( t»dt
. q=0 0q=
Здесь x = ( x i , X 2 ,..., x n ) и X = ( X i ,X 2 ,...,X n ) — вектор-функции состояния и скорости изменения состояния измерительного устройства соответственно; u = ( u i , U 2 ,..., u n ) и У = (y 1 ,y 2 ,... ,y n ) — вектор-функции измерений и наблюдений измерительного устройства соответственно; y 0 ( t ) = ( У 01 ( t ) , У 02 ( t ) , • • • , y 0n ( t )) — наблюдение, полученное в ходе натурного эксперимента; n – число параметров состояний системы; L и M – квадратные матрицы порядка n, представляющие собой взаимовлияние скоростей состояния и состояния измерительного устройства соответственно, D и N – квадратные матрицы порядка n, характеризующие взаимовлияние параметров измерения и связь между состоянием системы и наблюдением соответственно, u : [0 ,T ] ^ R n , F q G L ( U ) — самосопряженные положительно определенные операторы, q = 0 , 1 , ..., p +1 , || • || и (• , •) — евклидовы норма и скалярное произведение в R n соответственено.
Заметим, что системы леонтьевского типа являются конечномерным частным случаем уравнений соболевского типа . Поэтому, при изучении их мы будем использовать идеи, методы и результаты общей теории [8], адаптированные к конечномерной ситуации. В общем случае det L = 0 , матрица M - ( L, р ) -регулярна, т.е. существует число a G C такое, что det( aL — M ) = 0 , существует число p G { 0 } U N равное нулю, если в точке С5О L-резольвента ( ^L — M ) -1 матрицы M имеет устранимую особую точку; и равное порядку полюса в точке С5О матриц-функции ( ^L — M ) -1 в противном случае.
Несколько слов о начальном условии Шоуолтера-Сидорова (3), рассматривается оно при некоторых X 0 G R n , где a G p L (M ) = { д G C : det (^L — M ) = 0 } , R ^ (M ) = ( aL — M ) -1 L - правая L -резольвента матрицы M . В случае det L = 0 оно совпадает с начальным условием Коши. Однако использование условия Шоуолтера – Сидорова при численных исследованиях прикладных задач, сводящихся к системам леонтьевского типа или использующих их, позволяет снять ограничения на размер матриц, входящих в состав системы [9, 10]. При использовании начального условия Коши необходимо согласование начальных данных, проверка которых вызывает значительные трудности и накладывает ограничения при численном решении как начальных задач, так и задач оптимального управления. Кроме того, по мнению ряда авторов [11, 12], задача Шоуолтера – Сидорова более естественна для уравнений соболевского типа, чем задача Коши, наконец, укажем еще полезное обобщение [13] задачи Шоуолтера – Сидорова.
Функционал качества состоит из двух слагаемых, его минимизация позволяет находить такое оптимальное измерение, при котором 1) достигается наименьшее расхождение как значения выходного сигнала к выходному сигналу модели датчика, так и их производных,
-
2) нивелируется воздействие резонанса. Таким образом, второе слагаемое играет роль резонансных фильтров.
Для проведения вычислительных экспериментов авторами предлагается использовать следующий вид функционала качества:
1 T „ в т
J ( u )= в £ / \ \ y ( q ) (t) - у <^) | | dt + (1 - в ) £ ( f . u^(t),u ( q\t)}dt, (5)
q=0 О q=0 0
где в E [0 , 1] и 1 — в — весовые коэффициенты двух целей функционала качества, вариация которых позволит оценить взаимосвязь точности измерений и нивелирования резонансов, 0 < p +1 . Возможность использования величины 0 показана в [14].
Статья, кроме введения, содержит две части и список литературы, который не претендует на полноту, а отражает лишь вкусы и пристрастия авторов. В первой части статьи описан алгоритм программы нахождения решения задачи оптимального измерения с учетом резонанса, а во второй – представлены результаты вычислительного эксперимента.
-
1. Алгоритм программы
Программа предназначена для нахождения решения задачи оптимального измерения с учетом резонансов, написана на языке C++ с использованием компилятора visual studio. Он является современным языком программирования, позволяющим удобно писать эффективные программы. Большинство известных компиляторов других языков значительно проигрывают в скорости выполнения программ известным компиляторам C++.
В основе программы лежат методы решения задач оптимального управления для систем леонтьевского типа с начальным условием Шоуолтера-Сидорова [9]. Прежде всего заметим, что по построению пространство U сепарабельно. Значит, существует последовательность {U1} конечномерных подпространств Ul С U монотонно исчерпывающих пространство U, м т.е. Ul С Ul+1 и U Ul плотно в U. Поэтому ulk = ulk(t) будем искать среди векторов вида
1=1
l
l
l
ul = col £ a ji sin jt, £ a j 2 sin jt, ..., £ a jn sin jt ,
j =0
j =0
j =0
где l E N , l > p . Для простоты алгоритм излагается в предположении о том, что существует точно одна частота ω , при которой измерительное устройство (ИУ) резонирует (заметим, что как алгоритм, так и программа позволяют рассматривать несколько частот). Пусть амплитуда резонанса ИУ равна A ω (амплитуда A ω снимается с реального ИУ, поэтому считаем A w E (0 , +^о)). Теперь построим одно из слагаемых функционала J из формулы (5)
( F o ul,ul ) = ( col I £ a ji sin jt + A w a wi sin wt,
\ j=0 j =w
£ a j2 sin jt + А ш a w2 sin wt, ..., £ a jn sin jt + A w a wn sin wt I , ul ) .
j =0 j =0 I
-
j = w j = w
Опишем логическую структуру программы. В ее состав входят следующие модули: – ввод данных;
– расчет решения;
– операции над матрицами.
Для представления чисел используется вещественный тип двойной точности (double). Для величин такого типа под порядок и мантиссу отвводится 11 и 52 разряда соответственно, длина мантиссы определяет точность числа, а длина порядка – его диапазон.
Ввод данных осуществляется из конфигурационного текстового файла, задающего параметры расчета и имена файлов, из которых загружаются необходимые массивы. В качестве входных являются следующие данные:
-
– индекс выбранной задачи управления, т.е. определяется вид функционала качества, который будет принят для рассчета;
-
– имена файлов, в которых записаны массивы, входящие в состав системы и функционала качества - матрицы L , M , B , C , F q , q = 1 , 2 , ...,p + 1 , размера n х n , матрицы коэффициентов тригонометрических многочленов u ( t ) , число строк которых равно числу компонент n, а число столбцов равно l + 1 , массив данных наблюдения Y 0 , массив X q начальных значений состояния системы, значения амплитуды резонанса A ω и частоты резонанса ω ;
-
– значения параметров расчета – минимальный h min и максимальный h max шаги изменения элементов матрицы (a ij ) вектор-многочленов ul(t) , r — коэффициент изменения шага;
-
– константы β – весовой коэффициент в функционале качества задачи оптимального управления, τ – правая граница отрезка, на котором рассматривается задача, η – порядок квадратурной формулы Гаусса, θ – параметр второго слагаемого функционала качества, d – радиус шара в пространстве R l+1 , взятый в качестве U l ∂ .
На рис. 1 представлена обобщенная схема алгоритма решения.
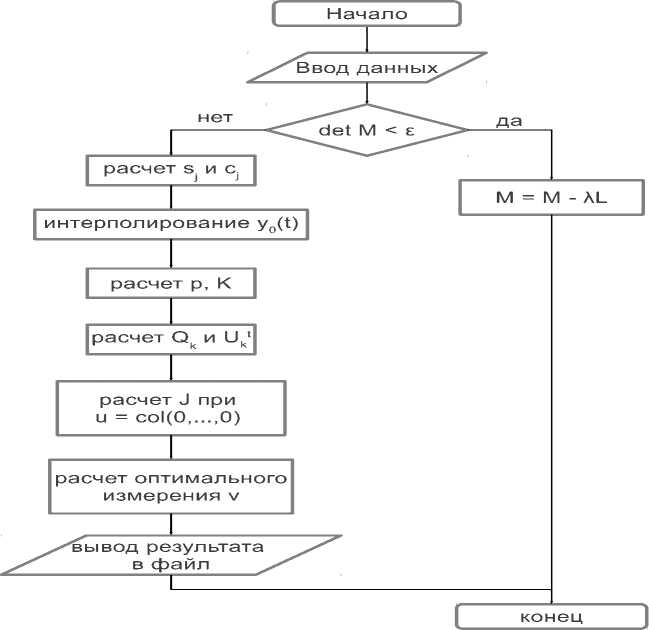
Рис. 1. Обобщенная схема алгоритма расчета решения задачи оптимального измерения
В схеме расчет s j и ω j представляет собой обращение к библиотеке класса С++ для расчета узлов и весов квадратурной формулы Гаусса.
При интерполировании y o ( t ) использован метод Лагранжа.
Приближенное значение состояния измерительного устройства, в предположении (L,p)-регулярности матрицы M и det M = 0, находится по формуле p m ττ
τ
2 s j ' △ c j ,
Xk(t)=£HM-1(In-Qk) (Duk)(q)(t)+Ukxo + 2£r| — 2sjQkDuk(T + q=0 j=0
где S j и C j - узлы и веса квадратурной формулы Гаусса соответственно, S j € [0 , T ] , j = 0 , m, m + 1 - количество узлов, H k = M —1 (Q k - I n ) L — нильпотентная матрица со степенью нильпотентности p ,
/ / t \ —1 \ k( p +1)
° k=( (l - k. ■ M) l) • Qk = ^M1 )) p+1 -
// т т X -1 \k (P +1 )-V т т X -1
R —2sj = L-~sm} L) L- - m} k y\ k(p +1) / J \ k(p + 1) J причем k = max {k1, k2}, где
n k1 > - £ |ai| + 1, l=q+1
t € [0 , т ] , a > max
1q - k2 > |aq| (n - q)n-q Ц0 ।al । (n - q + 1Г l + 1, Itl < 1
{1,Ы-1 (£Ja^L
Далее при условии, что все коэффициенты тригонометрических многочленов в (6) равны нулю, т.е. u = col(0,..., 0), находятся значения вектор-функций состояния измерительного устройства x в каждой из m + 1 точек, затем вычисляются соответствующие им значения у и, наконец, значение J при найденном y и начальном u. Процедура оптимизации подробно представлена на рис. 2. Отметим используемые в блок-схеме обозначения:
о a - матрица коэффициентов многочленов из (6), используемая в начале циклов;
о A - матрица, аналогичная а , создаваемая для промежуточных расчетов внутри циклов;
о A j - матрица, аналогичная а , для элементов которой в цикле достигается минимум функционала при изменении коэффициента с индексами (i,j ) ;
о A ik - матрица, аналогичная а , для элементов которой в строке i достигается наименьшее значение функционала, при этом фиксируется номер столбца k в этой строке;
о J ( A ) , J ( а ) - значения функционала при коэффициентах полиномов из (6), образующих соответственно матрицы A и a ;
о h max , h min , А - максимальный, минимальный и промежуточные шаги оптимизации.
В результате реализации процедуры оптимизации определяется значение измеряемого сигнала v и значение функционала J .
При создании программы были использованы методы оптимизации кода и вычислений. Для упрощения написания программного кода была использована такая возможность языка программирования С++ как перегрузка операций. Создав класс с собственным типом
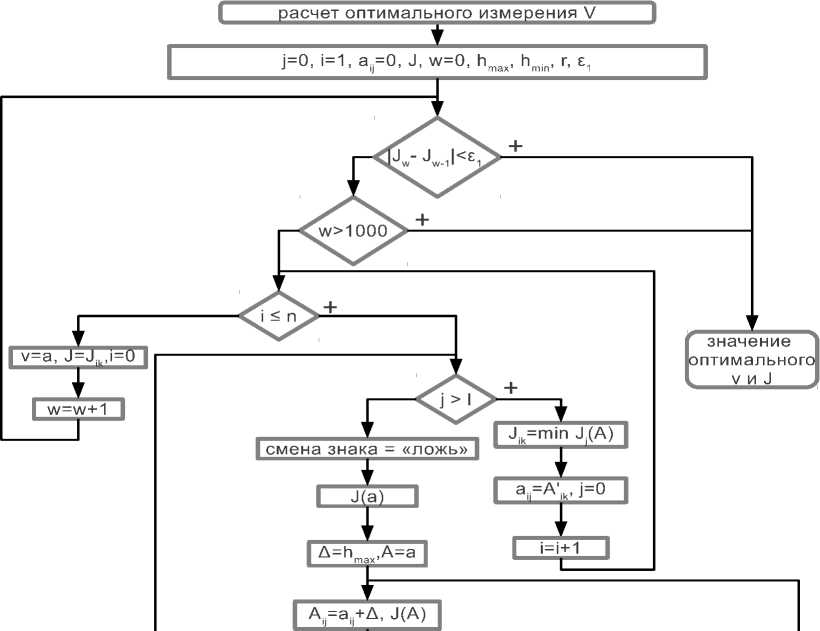
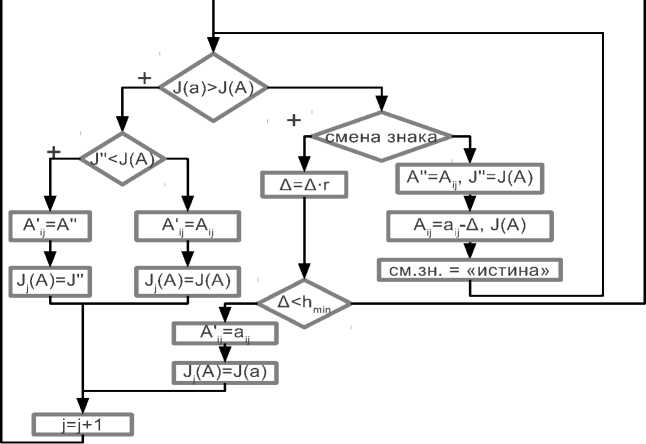
Рис. 2. Блок-схема процедуры оптимизации данных, по сути содержащий в себе двумерный массив как представление матрицы, получили возможность скрыть в классе реализацию математических операций над матрицами. Таким образом формулы расчета в тексте программы выглядят наиболее естественно, что сказывается на понимании программного кода и легкости его модификации.
Так же программа была подвергнута оптимизации скорости вычислений. Вследствие того, что при вычислении многих процедур программы значения функции необходимо получать не для бесконечного количества значений переменных, а в основном только для узлов интегрирования, то с учетом максимум двойного интеграла в формуле функционала качества достаточно сохранить для m 2 количества значений, где m + 1 количество узлов интегрирования. При выборе даже 101 точки получаем порядка 10000 значений, умножив которое на 8 байтовое представление числа, получим около 80 Кбайт на один кэш. В основной процедуре рассчитываются до 20 функций, максимальный кэш для функции интегрирования составляет 212 Мбайт, а суммарный кэш примерно составляет 0,5 Гбайт оперативной памяти. При современном оснащении компьютеров такой расход памяти и является допустимым, а в то же время позволяет на порядок повысить производительность расчетов. Для реализации кэша в языке С++ была использована возможность статического объявления переменных, когда они размещаются не в стеке, а в отдельно выделенной для нее памяти, и доступна на все время выполнения программы.
Программа эксплуатируется на персональном компьютере платформы Intel ( 80 х 86 ), работает под управлением Microsoft Windows. Вывод результатов расчета осуществляется в текстовый файл. Кроме того в ходе работы программы выводится подробный протокол расчета.
2. Вычислительный эксперимент
В качестве примера рассмотрим модель датчика, передаточная функция которого имеет вид
W 80000000000
W d ( p ) = ( p 2 + 140 p + 10000) ( p + 200) 3 .
Тогда, модель измерительного устройства будет представлена системой
/ о 1 о х = 0 0 1 х + (0 02 • 106) и,(1)
\-2 • 10 6 - 3 , 8 • 10 4 - 3 , 4 • 102/
У = (1 0 0) х,(2)
причем в начальный момент времени вектор-функция состояния измерительного устройства равна нулю.
Представим систему (3.1)-(3.2) в виде системы уравнений (1.1)-(1.2), построив матрицы L , M , N и D следующим образом
|
/ 1 0 0 \ / L = 0 1 0 , M = 001 - / 1 0 0 \ N = 0 0 0 , 000 Кроме того, пусть известна частота ω = Реализовав первый шаг алгоритма при l |
0 1 0 \ 0 0 1 , 2 • 10 6 - 3 , 8 • 10 4 - 3 , 4 • 102/ / 0 0 0 \ D = 0 0 0 . У0 0 2 • 106/ 4000 и амплитуда A = 0 . 03 резонанса. = 31 , получили p = 0 , K = 88796 . |
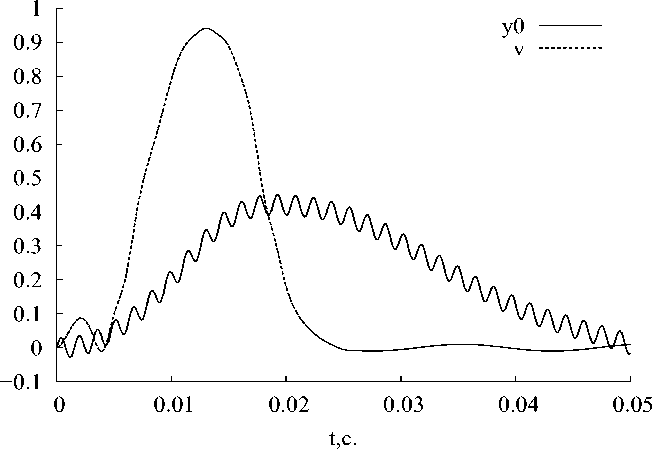
Рис. 3. Восстановленный сигнал v = v ( t ) и значения наблюдения y 0 = y o ( t )
Построим множество U l ∂ . Вектор измерений u полностью определяется своей третей компонентой, следовательно, для его нахождения можно ограничиться пространством R l +1 . Пусть, далее, имеется информация, что значения измеряемого сигнала не превосходят 2, поэтому в качестве U d можно взять замкнутый шар в пространстве R l +1 радиуса 2 с центром в начале координат. График функции восстановленного сигнала и значения выходного сигнала, полученного в результате натурного эксперимента, представлены на рис. 3.
Различия представленных графиков отражают инерционность измерительного устройства, проявляющуюся в сглаживании ≪ пикообразного ≫ сигнала и запаздывании выходного сигнала датчика.
Список литературы Задача оптимального измерения с учетом резонансов: алгоритм программы и вычислительный эксперимент
- Шестаков, А.Л. Измерительный преобразователь динамических параметров с итерационным принципом восстановления сигнала/А.Л. Шестаков//Приборы и системы управления. -1992. -№10. -С. 23-24.
- Шестаков, А.Л. Восстановление динамически искаженных сигналов испытательноизмерительных систем методом скользящих режимов/А.Л. Шестаков, М.Н. Бизяев//Известия РАН. «Энергетика». -2004. -№ 6. -С. 119-130.
- Шестаков, А.Л. Нейросетевая динамическая модель измерительной системы с фильтрацией восстанавливаемого сигнала/А.Л. Шестаков, А.С. Волосников//Вестник Южно-Урал. гос ун-та. Серия «Компьютерные технологии, управление, радиоэлектроника». -2006. -№ 14 (69), вып. 4. -С. 16-20.
- Шестаков, А.Л. Новый подход к измерению динамически искаженных сигналов/А.Л. Шестаков, Г.А. Свиридюк//Вестник Южно-Урал. гос. ун-та. Серия «Математическое моделирование и программирование». -2010. -№ 16(192), вып. 5. -С. 116-120.
- Шестаков, А.Л. Численное решение задачи оптимального измерения/А.Л. Шестаков, А.В. Келлер, Е.И. Назарова//Автоматика и телемеханика. -2012. -№ 1. -С. 107-115.
- Келлер, А.В. Задача оптимального измерения: численное решение, алгоритм программы/А.В. Келлер, Е.И. Назарова//Изв. Иркут. гос. ун-та. Серия «Математика». -2011. -Т. 4, № 3. -С.74-82.
- Шестаков, А.Л. Оптимальное измерение динамически искаженных сигналов/А.Л. Шестаков, Г.А. Свиридюк//Вестн. Юж-Урал. гос ун-та. Серия «Математическое моделирование и программирование». -2011. -№ 17(234), вып. 8. -С. 70-75.
- Sviridyuk G.A. Linear Sobolev Type Equations and Degenerate Semi-groups of Operators/G.A. Sviridyuk, V.E. Fedorov. -Utrecht; Boston; Koln; Tokyo: VSP, 2003.
- Келлер, А.В. Об алгоритме решения задач оптимального и жесткого управления/А.В. Келлер//Программные продукты и системы. -2011. -№ 3. -С. 170-174.
- Келлер, А.В. Численное решение задачи стартового жесткого управления для моделей леонтьевского типа. Вычислительный эксперимент/А.В. Келлер//Естественные и технические науки. -2011. -№ 4. -С. 476-482.
- Свиридюк, Г.А. Задача Шоуолтера -Сидорова как феномен уравнений соболевского типа/Г.А. Свиридюк, С.А. Загребина//Изв. Иркут. гос. ун-та. Серия «Математика». -2010. -Т. 3, № 1. -С.104-125.
- Замышляева, А.А. Начально-конечная задача для уравнения Буссинеска-Лява/А.А. Замышляева, А.В. Юзеева//Вестн. Юж-Урал. гос ун-та. Серия «Математическое моделирование и программирование». -2010. -№16 (192), вып. 5. -С. 23-31.
- Загребина, С.А. О задаче Шоуолтера-Сидорова/С.А. Загребина//Изв. ВУЗ. Матем. -2007. -№ 3. -С. 22-28.
- Манакова, Н.А. Об одной задаче оптимального управления с функционалом качества общего вида/Н.А. Манакова, А.Г. Дыльков//Вестн. Сам. гос. техн. ун-та. Серия «Физ.-мат. науки». -2011. -№ 4(25). -С.18-24.
