Задачи пассивного поворота гусеничной машины (постановка, модель движения)
")
Автор: Позин Борис Михайлович, Трояновская Ирина Павловна, Апанасик Вадим Георгиевич
Рубрика: Расчет и конструирование
Статья в выпуске: 25 (97), 2007 года.
Бесплатный доступ
Ставится задача неуправляемого (пассивного) поворота гусеничной машины, составляется модель её движения при уводе в виде квазистатического процесса. Предлагается алгоритм численного решения задачи движения, основанный на теории криволинейного интеграла и модели взаимодействия гусениц с деформируемым грунтом.
Короткий адрес: https://sciup.org/147151419
IDR: 147151419 | УДК: 629.3.017.3
Текст научной статьи Задачи пассивного поворота гусеничной машины (постановка, модель движения)
Теория поворота гусеничных машин развивалась сначала как теория управляемого криволинейного движения. Потребности практического проектирования скоростных машин и его научного обеспечения определили круг задач и методы их решения: расчёт тягового и мощностного балансов, условий заноса, устойчивости, управляемости и др. [3, 7, 14].
Развитие тракторного парка машин и современное производство тихоходных тяговых машин и агрегатов на их базе выдвигает необходимость постановки и решения проблем неуправляемого (пассивного) поворота со своими задачами и методами решений.
Пассивным поворотом будем называть криволинейное движение машины под действием внешних сил без управляющего воздействия со стороны водителя. Исследования пассивного поворота немногочисленны и, как правило, посвящены частным задачам [5, 11, 13], тем более, что они, в отличие от задач управляемого поворота, не всегда имеют однозначное решение.
Наибольший интерес из задач пассивного поворота представляют задачи страгивания и увода.
Под страгиванием в теории поворота понимается начало или конец движения, когда угловая скорость машины равна нулю [1]. Решение этой задачи позволяет определить тягово-сцепные качества машины при сдвиге ее внешней силой, а также возможные угловые ускорения для определения динамических нагрузок в самой конструкции машины [1].
Задача страгивания (сдвига) с изотропным и анизотропным трением была сформулирована и решена еще Ф.А. Опейко [И] на основе трудов Н.П. Шиллера и Н.Е. Жуковского о равновесии площадки с трением [6, 16]. Независимо от значения углового ускорения, для каждой линии действия сдвигающей силы задача страгивания имеет единственное решение относительно величины предельной силы и координат центра вращения.
Теоретические и экспериментальные исследования [2, 17] показали, что на деформируемом грунте задача страгивания гусеничной машины с места решается так же, как на твёрдом. Коэффициенты анизотропного трения в этом случае принимаются равными максимальным значениям продольных и поперечных коэффициентов сцепления гусеницы с грунтом.
Таким образом, задача страгивания гусеничной машины с места под действием внешней сдвигающей силы достаточно полно исследована, имеет теоретическое обоснование и экспериментальную проверку. Страгивание движущейся машины под действием внешней внецентренно приложенной нагрузки имеет некоторые особенности и является началом увода.
Уводом называется отклонение машины от заданного курса. Оценивается увод величиной отклонения, определяемого в результате построения траектории движения. Последняя формируется, как правило, в результате решения дифференциальных уравнений. Однако, для тихоходных машин, когда центробежные силы инерции малы, внешняя сила и силы от грунта можно считать уравновешенными, радиус кривизны траектории в этом случае изменяется крайне медленно, тогда общий случай нестационарного поворота можно рассматривать как квазистатический процесс.
Задача увода тихоходной гусеничной машины под действием внешней внецентренно приложенной силы на твёрдом основании с постоянными составляющими коэффициента трения решается однозначно только как задача страгивания с места. Если внешняя сила не превышает предельного значения для заданной линии её действия, машина движется прямолинейно без отклонения, в противном случае задача не имеет однозначного решения.
Позин Б.М., Трояновская И.П., Апанасик В.Г. Задачи пассивного поворота гусеничной машины______________________________________________________________(постановка, модель движения)
На деформируемом грунте задача увода решается однозначно. Рассмотрим эту задачу подробнее.
Для построения траектории увода в прямоугольной декартовой системе XY воспользуемся теорией криволинейного интеграла первого рода [15]:
Х = Х0 + j cos yds, (1)
(s)
Y = Yo + Jsin \|/ds, (2)
(S)
где \|/ - угол касательной к кривой в точке с осью X; ds - дифференциал дуги кривой в точке;
Хо, Yo - начальные координаты кривой.
Дуга S через радиус кривизны р и угол касательной у выражается соотношением:
ds = pd\|/. (3)
Таким образом, если известны р и w как функции какого либо параметра, то траектория может быть построена. В качестве параметра, при изучении движения, обычно принимают время т .
* V
Учитывая, что ds = Vdx и V = J ~ dx, формулы (1) и (2) при нулевых начальных условиях о Р запишутся в виде:
X = JVcos J—dx dt, Vo Р )
о
Y = jVsin J—dxldt, (5)
0 Vo P )
где t, T - время текущее и время процесса, соответственно.
Пусть гусеничная машина под действием внешней силы отклоняется от прямолинейного пути (рис. 1). При равных теоретических скоростях движения гусениц центры скольжения их опорных площадок совпадают (точка С на рис. 1). Радиус кривизны траектории точки С равен рс = хО+х (рис. 2). Таким образом, задача построения траектории сводится к нахождению величин хО и х в подвижной системе координат, связанной с машиной.
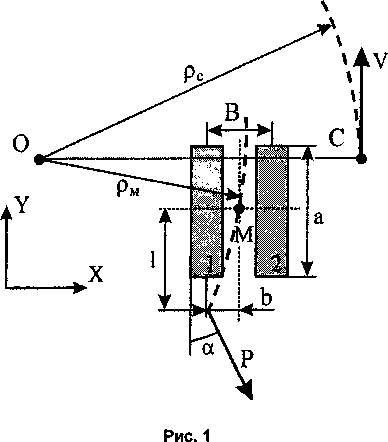
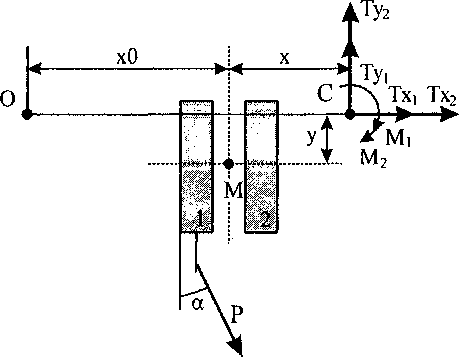
Рис. 2
Значения хО и х легко вычисляются при решении задачи страгивания, записанной в форме условий равновесия машины в различные моменты времени:
Psina + Тх, + Тх2 = 0;
' -Pcosa + Ту, + Ту2 = 0;
lPsina + bPcosa + x(Ty, +Ту2)-у(Тх, +Тх2)-М, -М2 =0.
Расчет и конструирование __________________________________
Входящие в уравнения силовые факторы, возникающие в контакте с грунтом, являются функциями координаты х [11] и учитывают деформативные свойства грунта. В связи с незначительной по сравнению с длиной, шириной гусеницы, последней, как правило, пренебрегают, что позволяет заменить двумерный интеграл при вычислении силовых факторов одномерным [12].
В таком случае силовые факторы, входящие в уравнения равновесия и приведенные к центру скольжения С (см. рис. 2) имеют вид:
0,5а
Тх1>2=- J Цф.
-0,5а
0,5а
ТУ1,2=
J q
-0,5а
у-п , х I, „ 'V ^’
W-n) +(х±0,5В)
х±0,5В,
,"-7=============^^’
°? (у-^^+^±0,56)^
М12 = q—у dq, ’ -0,5а ^G”1!)2 +(х±0,5В)2
где знак «+» соответствует отстающей гусенице (Тх,, Ту]3 Mj), а знак «-» - забегающей (Тх2, Ту2, М2); q, фх, фу - удельное давление, коэффициент сцепления в поперечном и продоль ном направлении гусеницы в точке, соответственно.
Поскольку все характеристики взаимодействия движителя с грунтом вводятся в точке, то автоматически учитывается форма и размеры самой площадки и закон распределения удельного давления.
Учёт деформативных свойств грунта в силах взаимодействия (7) производится путем использования переменных коэффициентов сцепления срх, <р . В теории активного поворота гусеничных машин при описании взаимодействия ходового аппарата с грунтом применяются разного рода зависимости, из которых наибольшее распространение в настоящее время получили формулы В.В. Кацыгина [9]:
Ф = фл (1 +---------)th(S5 / X).
1 ch(S8/X)7 v 5 7
где фд - коэффициент сцепления при полном скольжении; S5 - перемещение точки гусеницы; %, X - характеристики грунта.
Формула (8) используется, как правило, при описании установившегося поворота, т.к. её применение требует знания предыстории движения. Этот недостаток можно устранить, используя вместо перемещения S5 в качестве аргумента скольжение в точке к8 [4] (рис. 3):
Ф = ФД(1 + )th(k5/X). (9)
ch(k8/X)
Скольжение в точке опорной площадки колеса определяется как отношение скорости скольжения этой точки по грунту к теоретической скорости колеса. Распространим эту' формулу для описания движения гусеницы.
Еще одной особенностью задачи увода являются малые боковые перемещения и скорости. Если при управляемом повороте боковые перемещения точек опорной площадки гусеницы, и связанные с ними деформации грунта, а также скорости относительного скольжения измеряются, соответственно, метрами и м/с, тогда как при уводе - миллиметрами и мм/с. Следовательно, при уводе мы находимся всегда на восходящей ветви коэффициента сцепления (см. рис.З), что позволяет воспользоваться упрощённой формулой [4]:
Ф = ФДФ^. (Ю)
Кроме того, имеет место некоторая неопределённость зависимости силы от скольжения в начальный момент движения или, строго говоря, ненулевого значения силы при нулевом скольжении (см. рис.З). Этот факт широко известен и отмечался еще в опытах В.П. Запольского [8], на базе которых получены формулы В.В. Кацыгина. Обычно это явление учитывается поправками или функциями с некоторыми специальными аналитическими свойствами [10].
Позин Б.М., Трояновская И.П., Апанасик В.Г. Задачи пассивного поворота гусеничной машины (постановка, модель движения)
Сохраняя структуру формулы (10), учтем описанное выше явление, введя в аргумент в качестве слагаемого дополнительный член 6, величина которого равна напряжению в грунте, соответствующему началу сдвига:
Силовые факторы (7) с учетом изложенного выше, имеют вид:
0,5а
Тх,,2=- J qv:
-0,5а
0,5а
'у-ц)2+(х±0,5В)2
ТУ1,2= J чфу
х ± 0,5В
7(у-лУ+(х±О,5В)2
(х0 + х)Х
Подставляя (12) в систему уравнений (6), получим квазистатическую модель криволинейного движения при уводе. Из решения системы (6) для каждого значения сдвигающей внешней силы Р(т) находим координаты центра скольжения гусениц х и радиус поворота хО, что позволяет при заданных начальных условиях построить траекторию движения машины, вычислив интегралы (1) и (2).
При дискретном задании времени получаемый в результате решения системы (6) радиус кривизны траектории, а также V можно аппроксимировать любой удобной функцией.
Список литературы Задачи пассивного поворота гусеничной машины (постановка, модель движения)
- Апанасик, В.Г. Задача страгивания в теории поворота транспортных и тяговых машин/В.Г. Апанасик, Б.М. Позин, И.П. Трояновская//Механика и процессы управления моторно-трансмиссионных систем транспортных машин: сборник научных трудов Всероссийской научно-технической конференции Уральского отделения Российской Академии Наук, Институт машиноведения, Курган: КГУ. -2003. -с.156-159.
- Апанасик, В.Г. Пассивный поворот гусеничной машины (задача страгивания)/В.Г. Апанасик, Б.М. Позин, И.П. Трояновская//Достижение науки -агропромышленному производству: материалы XLIII Междуна-родной научно-технической конференции, Челябинск: ЧГАУ. -2004. -с.204-208.
- Благонравов, А.А. Динамика управляемого движения гусеничной машины/А.А. Благонравов,В.Б. Держанский. -Курган, 1995. -162 с.
- Вершинский, Л.В. Модель стационарного поворота колесной машины с шарнирно-сочлененной рамой/Л.В. Вершинский, Б.М. Позин, И.П. Трояновская//Вестник Челябинского государственного агроинженерного университета. -2006. -Т. 47.-С. 17-21.
- Егоров, Л.И Исследование некоторыхвопросов управляемости гусеничных лесосечных машин: автореф. дис.... канд. техн. наук/Л.И. Егоров. -М.: МЛТИ -1972.-25 с.
- Жуковский, Н.Е. Условие равновесия твердого тела опирающегося на неподвижную плоскость некоторой площадкой и могущего перемещаться вдоль этой плоскости с трением/Н.Е. Жуковский//Труды Отделения физических наук Общества любителей естествознания. -7597. -Т. IX.-Вып. 1. -С. 339-354.
- Забавников, Н.А. Основы теории транспортных гусеничных машин/Н.А. Забавников. -М.: Машиностроение, 1975. -448 с.
- Запольский, В.П. Исследование сцепных качеств и обоснование параметров траков гусеничных движителей: дис.... канд. техн. наук/В.П. Заполъский. -Минск, 1971.-160 с.
- Кацыгин, В. В. Основы теории выбора оптимальных параметров сельскохозяйственных машин и орудий/В.В. Кацыгин//Вопросы сельскохозяйственной механики. -1964. -Т. 13. -С. 5-147. 10.
- Умняшкин, В.А Моделирование процесса взаимодействия движителя колесной машины с опорной поверхностью/В.А. Умняшкин//Сб. науч. трудов МАДИ(ТУ): Техника технологии строительства и эксплуатации автомобильных дорог. -М.: МАДИ(ТУ), 2000. -С. 40-45.
- Опейко, Ф.А. Колесный и гусеничный ход/Ф.А. Опейко. -Минск, I960. -228 с.
- Позин, Б.М. Совершенствование параметров промышленных гусеничных тракторов: автореферат дис.... докт. техн. наук. -М.: МАДИ, 1991. -62 с.
- Рославцев, А.В. Разработка методов и средств исследования движения машинно-тракторных агрегатов: автореферат дис.... докт. техн. наук. -М.: НАТИ, 1996. -64 с.
- Фаробин, Я.Е. Теория поворота транспортных машин/Я.Е. Фаробин. -М.: Машиностроение, 1970. -176 с.
- Фихтенголъц, Г.М. Курс дифференциального и интегрального исчисления/Г.М. Фихтенголъц. -М.: Физматгиз, 1959. -807 с.
- Шиллер, Н.Н. Заметки о равновесии твердого тела при действии трения на некоторую плоскую часть его поверхности/Н.Н. Шиллер//Труды Отделения физических наук Общества любителей естествознания. -1892. -Т. V. -Вып. 1. -С. 17-19.
- Апанасик, В.Г. Экспериментальные исследования пассивного поворота гусеничной машины при страгивании/В.Г. Апанасик, Б.М. Позин, И.П. Трояновская, В.И. Костюченко, В.А. Бурматов//Достижение науки -агропромышленному производству: материалы XLIII Международной научно-технической конференции, Челябинск: ЧГАУ. -2004 -с.201-204.
