Анализ силовых характеристик при помощи электронной программы для стреловых роботов- манипуляторов

Автор: Бабоченко Наталья Владимировна
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Технологии и средства механизации сельского хозяйства
Статья в выпуске: 1 (22), 2019 года.
Бесплатный доступ
Предложено использование электронной программы для выполнения расчетов, связанных с определением силовых характеристик стреловых роботов-манипуляторов в зависимости от координат положения и размеров, составляющих соединение стрелы, с целью использования полученных результатов для дальнейшей исследовательской работы над конструкцией и функциональными возможностями стреловых роботов- манипуляторов. В литературных источниках приводится характеристика конструкций грузоподъемного оборудования, в частности стреловых гидроманипуляторов, а также рассматривается расчет кинематических характеристик стрелы гидроманипуляторов. Однако отсутствует анализ силовых характеристик для стрелы гидроманипуляторов и в частности роботов-манипуляторов. Рассматриваемые стреловые роботы- манипуляторы имеют свою особенность, сформирован целенаправленный силовой поток - звенья стрелы воспринимают усилия растяжения или сжатия. Обе секции стрелы - это пространственные фермы - большинство их узлов несут определенную функцию. Робот-манипулятор в целом - вместе с гидроцилиндрами - представляет сложную, но функционально обусловленную пространственную ферму, геометрия которой видоизменяется за счёт изменения длины гидроцилиндров, а шарнирные соединения обеспечивают необходимые подвижности звеньям. В ходе исследования предложен анализ силовых характеристик в виде электронной программы для стрелы роботов- манипуляторов, которая базируется на уравнениях равновесия сил и моментов, действующих на шарнирно-стержневую стрелу. Анализ силовых характеристик для стреловых роботов-манипулятороввыполняется согласно законам статики. В статье раскрываются возможности использования электронной программы на примере стреловых роботов-манипуляторов. Использование предложенной компьютерной программы упрощает трудоемкость процесса расчета и дает возможность выбора оптимальных значений силовых характеристик.
Электронная программа, стреловой робот- манипулятор, силовая характеристика, шарнирно-стержневая стрела, конструкция
Короткий адрес: https://sciup.org/147230891
IDR: 147230891 | УДК: 621.865.8-23:005.52:004.9
Analysis of power characteristics using an electronic program for boom robot-manipulators
It is proposed to use an electronic program to perform calculations related to determining the power characteristics of boom manipulator robots depending on the position coordinates and dimensions that make up the junction of the boom, in order to use the results for further research work on the design and functionality of boom robotic manipulators. In literature sources, characteristic designs of gross vehicle equipment, in particular, of hydromanipulators, are considered, and the kinematic characteristics of the hydromanipulators are calculated. Exceptionally, there is no sophisticated characteristic of the hydromanipulators and the specificity of the robot manipulators. Analyzed boom robot - manipulators have their own flawlessness, which is characterized by the fact that the motionless axes are shaped by tensile or compressive force. The section of the arrows are globular girder, the majority of them have a specific function. The robot manipulator with the hydraulic cylinders represent a sloping, functionally spinned spatial girder, geometry is modified for a long time, and the hinge assemblies ensure the unobstructed permeability of the joints. In the case of an experimental study of the characteristic features of the video program for the robot manipulators, which is based on the equilibrium of the equilibrium and momentum, acting on the hinge-stroke line. Analysis of the syllable characteristic for the drum robot manipulators is subject to statutory laws. In the article, they are exposed to the possibility of using an electronic program on rock-bottomed robot manipulators. Usage of the recommended computer program will allow the process to calculate the optimum value and the optimum value of the syllabic characteristic.
Текст научной статьи Анализ силовых характеристик при помощи электронной программы для стреловых роботов- манипуляторов
Введение. Имеется множество разработок роботов-манипуляторов, которые нашли свое применение в повседневной жизни. Однако работы по усовершенствованию конструкции роботов-манипуляторов продолжаются и в наши дни. Для расчетов геометрических и кинематических характеристик в зависимости от конструкции используются электронные программы. Особенность расчетов проводимых согласно электронной программе для каждой конструкции своя. Так разработав, стреловой робот-манипулятор возникла необходимость в определении для стрелы данной конструкции силовых характеристик, так как она является основной конструктивной наиболее нагруженной составляющей, чтобы в дальнейшем получить оптимальные расчетные значения силовых нагрузок с возможностью последующего прогнозирования оптимальной работы робота-манипулятора в целом.
Основная часть. Изучив имеющиеся конструкторские разработки [1], конструктивно разработали стрелу робота -манипулятора, схема которой представлена на рисунке 1. Конструкция стрелы геометрически представляет связанные между собой шарнирно-стержневые соединения. В нашем случае имеем шарнирностержневую стрелу, которая конструктивно представляет собой связанные в единое целое корневую секцию 1, рукоять 2 и грузозахватный орган стрелы 3. Корневая секция 1 выполнена из трех стержней в виде шарнирного треугольника с двумя острыми углами. Рукоять выполнена из двух стержневых шарнирных треугольников с двумя острыми углами и общей для обоих треугольников связью, один из шарниров которой соединен с силовыми цилиндрами рукояти. Два указанных шарнирно - стержневых треугольника имеют общую связь между собой в виде стержня, ближайший к грузозахватному органу шарнирный треугольник имеет в основании два силовых цилиндра 4, 5, работающие как одно кинематическое звено. Два других шарнирностержневых треугольника также связаны между собой в виде стержня, а в основании одного из шарнирных треугольников имеются два силовых гидроцилиндра 6, 7, которые работают, как одно кинематическое звено и связаны с двумя гидроцилиндрами предыдущего шарнирно-стержневого треугольника. Стержни, составляющие треугольные соединения выполнены в виде плоских в поперечном направлении ферм.
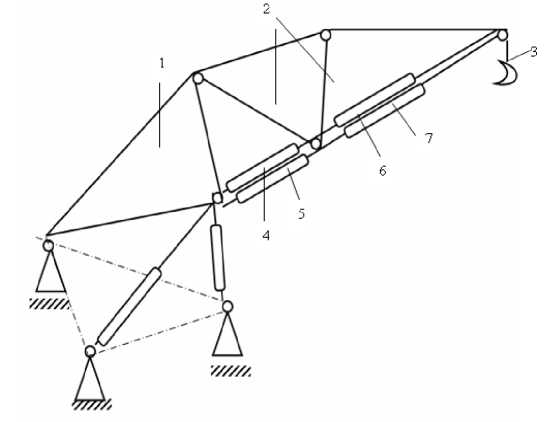
Рисунок 1 - Схема стрелового робота-манипулятора
Благодаря такому конструктивному исполнению шарнирно-стержневой стрелы робота-манипулятора и расположению гидроцилиндров, стержни всех “треугольников” воспринимают в основном нагрузки растяжения или сжатия, а шарнирные соединения обеспечивают необходимые подвижности звеньям манипулятора. Дополнительные, ближайшие к грузозахватному органу, гидроцилиндры обеспечивают максимальный подъем и опускание грузов. Как следствие из сказанного, достигается оптимальное распределение нагрузок растяжения - сжатия на стержни и плоские фермы, способствующие повышению силовой мощности конструкции, за счет разворота стрелы в горизонтальной плоскости увеличивается зона действия системы и в вертикальной плоскости за счет работы силовых гидроцилиндров увеличивается зона действия, а для грузонесущего органа сообщается дополнительное перемещение в горизонтальной плоскости, что расширяет функциональные возможности стрелы. Конструкторская оригинальность шарнирностержневой стрелы подтверждена патентом [2]. Проводя дальнейшую работу с конструкцией шарнирно-стержневой стрелы на предмет использования её в качестве рабочего органа для роботов- манипуляторов возникла необходимость в исследовании силовых характеристик конструкции. Так для анализа силовых характеристик стрелового робота-манипулятора представленного на рисунке 1 была написана электронная программа, учитывающая проведенную ранее работу над конструктивными особенностями и кинематическими характеристиками подобного рода манипуляторами [3-11].
Алгоритм силового анализа представляет собой уравнения равновесия сил и моментов, действующих на шарнирно-стержневую стрелу:
φ = (arctan((z)/sqrt(sqr(x) + sqr(y))));
R1 = 2 ⋅ y;
F1 = (2 ⋅ R1 ⋅ L1)/x1;
F2 = (R1 ⋅ L2)/x2; (1)
R2 = f
F1 - (z + z1)J /F2 - (z + z2)J / G
L1 ■ sin(ф) J + \ L2 ■ sin(ф) J \sin(ф)
M0 = 2 - (x - y).
В условиях расчёта считаются известными координаты точек крепления гидроцилиндров шарнирно-стержневой стрелы грузоподъемного средства на основании. Известны также геометрические размеры двухзвенной шарнирно-стержневой стрелы, длина гидроцилиндров и их ход штока. Плоские фермы треугольников и, в частности, плоская ферма корневой секции первоначально трактуются как стержни, а при разработке расчётной схемы секции будет учитываться её реальная конструкция. Требуется определить усилия F1, F2, F3 в штоках гидроцилиндров (параллельные гидроцилиндры рукояти рассматриваются как одно кинематическое звено). В числе искомых величин реакции R0 и R01 в шарнирах и момент МО в опорном шарнире. Решение уравнений (1) аналитическим путем без использования компьютерной программы процесс долгий и трудоемкий. Использование компьютерной программы не только упрощает трудоемкость процесса расчета, но и дает возможность выбрать оптимальные значения силовых характеристик.
Согласно работе программы, представленной на рисунке 2, получаем необходимые значения неизвестных величин, которые, впоследствии, используем для дальнейшей работы с целью обоснования возможностей в работе как шарнирно-стержневой стрелы, так и робота-манипулятора в целом.
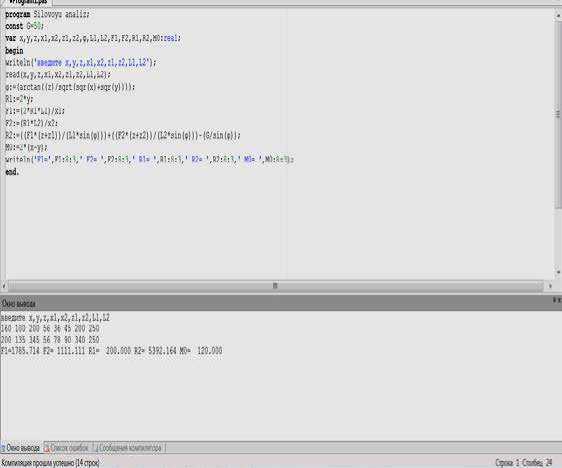
Рисунок 2 – Программа в работе
Заключение. Исходя из описания, приведенного выше, можно сделать вывод:
-
1. Алгоритм силового анализа представляет собой уравнения равновесия сил и моментов, действующих на шарнирно-стержневую стрелу и решение этих уравнений упрощается с использованием компьютерной программы.
-
2. Разработанная компьютерная программа, способна рассчитывать оптимальные значения силовых характеристик для стреловых роботов-манипуляторов.
-
3. Возможно использование приведенной компьютерной программы так же и для грузоподъемных средств имеющих шарнирностержневую стрелу.
Список литературы Анализ силовых характеристик при помощи электронной программы для стреловых роботов- манипуляторов
- Патент РФ на полезную модель №145959. Стрела грузоподъёмного средства / Бабоченко Н.В. Опубл. 23.05.14 г. - 8 с.
- Патент РФ на полезную модель №165029. Стрела грузоподъёмного средства / Бабоченко Н.В. Опубл. 09.05.16 г. - 8 с.
- Бабоченко, Н.В. Модель шарнирно-стержневого манипулятора с пространственным приводным механизмом [Текст] / Н.В. Бабоченко // Известия нижневолжского агроуниверситетского комплекса. - 2014. - №1. - С.225 - 229.
- Бабоченко, Н.В. Компьютерное построение зоны действия шарнирно-стержневого робота манипулятора [Текст] / Н.В. Бабоченко // Агротехника и энергообеспечение. - 2015. - №1. - С.50 - 56.
- Габрусева А.О. Определение координат перемещения несущей конструкции шарнирно-стержневой стрелы гидроманипулятора [Текст] / А.О. Габрусева // Вклад молодых ученых в аграрную науку. Материалы международной научно-практической конференции. Самарская ГСХА. Кинель. 2017. - С.262-265.
