Численное исследование генерации волн на поверхности при погружении твёрдого тела в жидкость

Автор: Левин Владимир Алексеевич, Надкриничный Леонид Владимирович
Журнал: Вычислительная механика сплошных сред @journal-icmm
Статья в выпуске: 1 т.4, 2011 года.
Бесплатный доступ
Рассматриваются результаты численного моделирования погружения цилиндрического твёрдого тела в невозмущённую жидкость. Исследуется волонообразование при данном процессе, а также зависимость параметров образованных волн от параметров тела. Используется модель мелкой воды в цилиндрической системе координат. Применяется разностная схема с неувеличивающейся полной вариацией (TVD схема) на разностной сетке типа «C» по классификации Аракавы.
Погружение твёрдого тела, цунами, мелкая вода, tvd схема
Короткий адрес: https://sciup.org/14320544
IDR: 14320544 | УДК: 519.63+550.344.42
Numerical investigation of surface wave generation during immersion of a rigid body into a liquid
We present a numerical investigation of immersion of a cylindrical rigid body into an unexcited liquid. Generation of water waves and dependence of the parameters of these waves on the body parameters are studied. A shallow water model in a cylindrical coordinate system is applied. A total variation diminishing (TVD) scheme is used on the finite difference C-type grid according to Arakawa's classification.
Текст научной статьи Численное исследование генерации волн на поверхности при погружении твёрдого тела в жидкость
Особый интерес в последнее время вызывает возможность возникновения катастрофических волн цунами при падении в океан тел из межпланетного пространства. Такие волны в современной научной литературе принято называть космогенными цунами [1]. Падение метеорита в океан может привести к появлению цунами колоссальной высоты, а если учесть, что поверхность океана занимает значительную площадь земной поверхности, то падение метеорита в океан более вероятно, чем на сушу. Хотя сценарий падения метеорита с необходимыми для возбуждения достаточно крупной волны размерами маловероятен, всё же проблема прогнозирования такого явления остаётся [1].
Задача возникновения космогенных цунами включает в себя различные проблемы гидроаэродинамики, механики твёрдого тела, динамики многокомпонентных сред, теории вероятности и других, поэтому из-за высокой совокупной сложности она разделяется на ряд подзадач, в каждой из которых делаются определённые допущения.
Проблеме цунами, вызванных падением «внеземных» объектов в океан, посвящён ряд работ. В некоторых, в частности, проводится анализ статистических данных известных явлений, относящихся к космогенным цунами. Например, в работе [2] с помощью простых аналитических выкладок описывается процесс образования цунами.
Падение или погружение «внеземного» тела здесь не рассматривается, а задаётся начальная деформация водной поверхности в виде каверны, которая, следуя статистическим данным, отражает падение астероида в океан. В [2] также предлагаются вероятностные оценки и эмпирическая формула понижения амплитуды волны, основанная на аналитических выкладках авторов.
Интересный численный расчёт приводится в работе [3], где рассматривается падение астероида, а точнее, твёрдого тела заданного размера. Для расчёта образования возмущения водного слоя используется довольно сложная численная схема, а для образования цунами — другая схема, в которой применяются данные, полученные с помощью первой. Подобное сопряжение вычислений как трудоёмко, так и малодостоверно. Работа [3] в большей мере относится к задаче падения астероида в общем, а не к моделированию цунами как возможного последствия такого явления.
Современный обзор исследований, касающихся падения астероидов в океан, содержит монография [1]. Также в ней даётся аналитическое представление образования цунами при распаде на водной поверхности заданной каверны; проводятся расчёты на основе потенциальной модели движения жидкости; приводятся количественные оценки явления и вероятностные данные по проблеме.
В настоящей работе рассматривается полный расчёт образования поверхностных волн, возникших при погружении твёрдого тела в жидкость, то есть учитывается как само волнообразование, так и зависимость параметров сгенерированных волн от параметров тела. Твёрдое тело представляет собой цилиндр с круговым сечением, «головная» часть которого в одном случае имеет плоское затупление, а в другом — полусферическое. Возникшие волны обладают нелинейным характером, и для их адекватного описания необходимо привлекать нелинейные модели волновой гидродинамики. В данной работе используется модель движения жидкости на основе уравнений мелкой воды, записанных в цилиндрической системе координат. Конечноразностный аналог исходной системы дифференциальных уравнений строится с помощью разностной сетки типа «C» по классификации Аракавы. Численное решение находится с использованием явной TVD схемы первого порядка точности по пространству и времени [4, 5].
При погружении в жидкость цилиндр ведёт себя как поршень и, вытесняя жидкость, испытывает сопротивление, теряет скорость. У стенки цилиндра уровень жидкости повышается и, достигнув определённого значения, образует волну. После того как цилиндр прекращает движение, образованная волна отходит от его стенки. С течением времени амплитуда волны убывает. В работе выявлены зависимости амплитуды образованных волн от параметров погружающегося тела: его начальной скорости и размеров.
-
2. Постановка задачи
Рассматриваем осесимметричное течение идеальной несжимаемой жидкости, ограниченной снизу дном Γ 0 , заданным функцией z = - b ≡- 1 , и осью симметрии Γ 1 с абсциссой r = 0 . Здесь r , z — координаты точек в цилиндрической системе координат Orz , имеющей горизонтальную ось Or , лежащую на невозмущённой свободной поверхности жидкости, и вертикальную ось Oz (Рис. 1). Цилиндр задаём как непроницаемую поверхность Γ 2 , которая зависит от формы «головной» части и описывается следующим образом: – при полусферическом затуплении
S 1 ( r , t ) = R b - R b 2 - r 2 - V b ( t ) ⋅ t , 0 ≤ r ≤ R b ,
– при плоском торце
S 2 ( r , t ) = - V b ( t ) • t , 0 < r < R b .
Здесь Rb — радиус цилиндра, Vb ( t ) — скорость его погружения.
Свободная поверхность жидкости Г f подлежит определению. Будем считать, что она описывается однозначной функцией z = n ( r , t ), где t — время. Введём безразмерные величины по формулам:
r
r
H 0 ,
~b ~ g u b =----, t = t ----, u = , ,
H 0 H 0 gH 0
где g = const — ускорение свободного падения, H0 — характерная глубина (глубина в начальный момент времени), u — скорость движения жидкости. Символ «~», которым отмечены безразмерные величины, при последующем изложении опускается.
При введённом обезразмеривании критериями подобия являются: X = H 0 [Rb , число Фруда F = Vo /gH 0 ( V b ,0 — начальная скорость тела), а также отношение плотности жидкости к плотности тела: R = р l /р b .
При погружении в жидкость тело испытывает сопротивление. Закон движения, которому оно подчиняется, записывается как
MVb =-р/ CVS bld 2
[6] (силой тяжести
пренебрегаем), где M = 4рbпRb,3 — масса погружающегося тела, S = пR2 — площадь миделевого сечения, Cd = 1 — коэффициент сопротивления [7]. Это уравнение имеет простое решение: Vb = Vb0 • eаL, в котором L — путь тела (в данном случае это —
3 Cр глубина водного слоя) и а =---d—l-. Если в решение подставить «реалистичные»
-
8 R b Р ь
значения, например, глубину водного слоя 1 километр и радиус тела 10 метров, начальную скорость и плотность тела, соответственно, 25 км/с и 3 •Ю3 кг/м3, то видно, что скорость тела быстро падает: от начального значения до почти нулевого — 0,09 м/с. Следовательно, сопротивлением пренебрегать нельзя; поэтому ищем также и решение системы (обезразмеренной):
3 _
V b =-- C d XRVb, z b = V b ( t ).
Для моделирования течения жидкости используем одномерные уравнения мелкой воды в цилиндрической системе координат:
Hu
П t + ( Hu ) r = --,
r
<
( Hu ), + Hu 2 +---
‘ I 2 J r
Hu 2
,
r
H = n + b.
Решение задачи, заключающееся в определении изменения уровня поверхности жидкости и зависимости максимальной амплитуды образованных волн от параметров погружающегося тела (начальной скорости и радиуса цилиндра), состоит из решения систем (1) и (2) в соответствии с начальными и граничными условиями:
-
- в начальный момент времени t = 0 жидкость покоится ( u ( r ,0) = 0) и ограничена сверху невозмущённой свободной поверхностью ( р ( r ,0) = 0); тело имеет начальную скорость V b (0) = Vb0 и расположено над поверхностью невозмущённой жидкости так, что min S i ( r ,0) = 0; r
-
- на оси симметрии Г 1 ставится условие:
и (0, t ) = 0, t > 0;
- на движущейся поверхности Г 2 задаётся условие непротекания:
П = S,
д ( rHu ) = д S i д r д t
где индекс i принимает значения 1 или 2 и определяет форму затупления «головной» части цилиндра.
-
3. Алгоритм расчёта
Численные расчёты проводились для жидкости, заполняющей бассейн с радиусом R = 0,5, причём счёт прекращался, как только образованная волна доходила до координаты r = R . Отрезок Q = [ 0; R ] равномерно, с постоянным шагом h , покрывался интервалами Q h ; общее количество ячеек в направлении оси Or составляло N . Согласно сетке типа «С» по классификации Аракавы [4] на границах каждого Q h вычислялись значения скорости ui n и потока массы ( Hu ) i n , а внутри интервалов — положение свободной поверхности р П^^ .
Для получения численного решения использовалась явная разностная схема с уменьшающейся полной вариацией (TVD схема) первого порядка точности по пространству и времени, описанная в работе [5]. Там же даётся условие, при котором полная вариация не увеличивается, то есть условие того, что схема обладает свойством TVD. Причём для явной схемы это условие совпадает с условием устойчивости Куранта– Фридрихса-Леви: C -A t / A r < 1 ( C — характерная скорость). Таким образом, условие КФЛ обеспечивало устойчивость выбранной разностной схемы и гарантировало отсутствие нефизических осцилляций в решении. На каждом временном слое шаг по времени определялся исходя из этого условия.
Рассмотрим алгоритм численного расчёта. Пусть на n -м слое по времени известны значения ( Ни ) П , р П+^ . По ним вычисляем дополнительные значения: Н"^ ) =П П+yi) + b и u i = 2 ( Hu ) " /( Н ’(„2 ) + Н Й1Й ) ) .
Получение решения на (n +1) -м слое состоит из нескольких этапов. На первом этапе находим шаг по времени согласно формуле т n =0 h
2max. Hn+ max un\ i V 1+(12) /1'1
- i
где 0 = 0,1 — коэффициент устойчивости. Затем методом Эйлера ищем решение системы (1) с известным шагом по времени. Так определяем положение цилиндра на новом временном слое.
На следующем этапе, согласно работе [5], рассчитываем численные скорости переноса для уравнений переноса из системы (2):
n a / + i
= *
0,5 [ ( Hu ) " + i - ( Hu ) П - i ]
П / + ( 12 ) П / - ( 12 )
n i+1,
nn
'*/+(12) П/-(12) ^ 0, nn
1 * / + ( 12 ) 1 * / - ( 12 ) 0;
u , '+ 1 ( Hu ) " + , + 0,125 ( + 1,2) + + 1,2) ) - u n ( Hu ) n -
n
- + ( 12 ) =
-o-125 (++,+H'm)2 ]/((Hu) '+1)-(Hu) n),
( Hu ) - ( Hu ) ,n + 0,
n
+ 1 ,
(Hu )"„-( Hu) n = 0.
Далее, на (n +1) -м временном слое вычисляем значение свободной поверхности n,n+11/2)
п n -nn
1 * / + ( 12 ) 1 * / + ( 12 )
n h [(Hu ),., -(Hu),+ q (a+1 )(nn,(+2)
n nnn
П + ( 12 ) ) - Q ( а )( П , + ( 12 ) -П , - ( 12 )
-
тn 0,5((Hu)n+1 +(Hu)n)
Г + ( 12 )
и значение потока массы ( Hu ) n + 1
n 2
(Hu), =(Hu), --{0,25[(Hu),., +(Hu), ](u’,1 + un) + 0,5(H/^) -
-
■0,25 (Hu)n +(Hu)n-1
( u n + u - 1 ) - 0,5 ( H -(V2 ) )5 + Q ( 1 +I V2 ) ) [ ( Hu ) n + 1 - ( Hu ) ,’
- Q (l’(12))[( Hu ) n-( Hu ) n-1 ]}- +
( Hu ) n • u n
0,5 ( ^ + ( 12 ) + r - ( 12 ) )
-
Приведённые формулы являются разностной аппроксимацией дифференциальной системы (2), причём слагаемые, содержащие Q ( x ), представляют собой схемную численную вязкость. Множитель Q ( x ) имеет следующий вид:
0,5 ( x 75 + 5 ), | x | <5 , v 7 где коэффициент 5 = 0,125 .
Q ( x ) = *
Полученные на ( n + 1) -м временном слое значения корректируем так, чтобы они удовлетворяли граничным условиям. Согласно [8], условие полного отражения для сеток типа «C» по классификации Аракавы имеют следующий вид (для левой и правой границ расчётной области):
n + 1 n + 1
u 0 = — u 2 ,
u
n + 1
N
u N — 2 ,
„ n + 1 n + 1 n + 1
u1 = 0, П(1/2) = П(3/2) , n+1 n +1 n+1
u N — 1 = 0, П N — ( 1/2 ) = Л N — ( 3/2 ) .
Поскольку задача осесимметричная, то численное представление граничного условия (3) имеет простой вид, то есть nn+1 = ZK, (Hu )n+1 = 0, (Hu) n+1 = М *72 (i = 17Nb), где Nb — это наибольшее количество Qh, в которых выполняется условие nn+1 ^ zn+ •
Описанные этапы численного интегрирования проводим на каждом временном слое. Во времени процесс вычислений продолжаем до тех пор, пока не будет достигнут временной слой, соответствующий требуемому расчётному времени.
-
4. Результаты вычислительных экспериментов
Рассмотрим процесс волнообразования на примере погружения цилиндра с полусферическим затуплением в невозмущённую жидкость. При вычислениях в уравнениях (1) полагаем значение R = 1/3, которое может соответствовать плотности жидкости р l = 10 3 кг/м3 и плотности тела р b = 3 - 10 3 кг/м3 (известная величина для каменного астероида). Картина данного процесса показана на рисунках 1 и 2, на которых изображены графики волнообразования в различные моменты времени при значениях модельных параметров: Rb = 0,1 и Vb 0 = 30. Рисунок 2 — это увеличенная область рисунка 1, на котором видно, как цилиндр касается поверхности жидкости и как вытесняемая им жидкость движется вдоль его полусферической части и
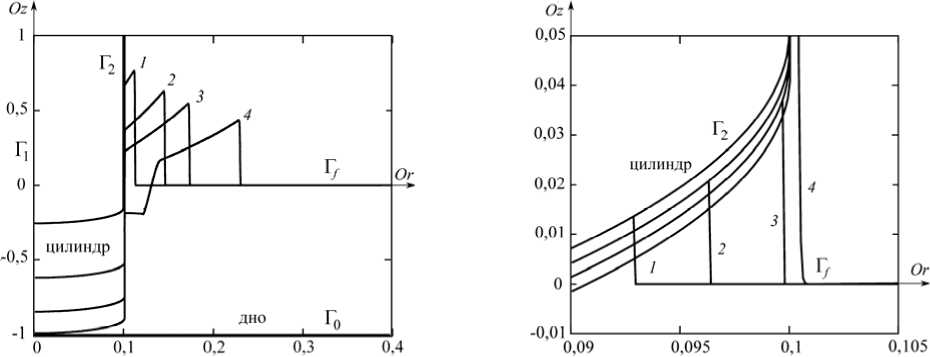
Рис. 2. Фрагмент рисунка 1. Профили свободной поверхности и цилиндра в моменты времени: 1,73 - 10 — 3 (кривая 1 );
1,83 - 10 — 3 ( 2 ); 1,94 - 10 — 3( 3 ); 2,04 - 10 — 3( 4 ).
Рис. 1. Погружение цилиндра с полусферическим затуплением. Профили свободной поверхности и цилиндра в моменты времени: 1,0 - 10 — 2 (кривая 1 );
3,11 - 10 — 2 ( 2 ); 5,02 - 10 — 2( 3 ); 9,13 - 10 — 2( 4 ).
выходит за границу радиуса цилиндра. Погружение цилиндра сопровождается образованием возле его стенки повышения уровня жидкости (Рис. 1), которое затем распадается на волну. Уровень свободной поверхности между цилиндром и волной постепенно понижается, поверхность принимает изначальное положение. В результате формируется одиночная волна.
Для сравнения влияния формы затупления на образование волны проведён аналогичный расчёт (с теми же значениями модельных параметров) для цилиндра с плоским затуплением «головной» части. Построенные по результатам обоих численных экспериментов графики изменения уровня свободной поверхности в точке r = 0,2 практически совпадают, о чем свидетельствует рисунок 3. Разница состоит лишь в том, что волна, образованная погружением цилиндра с плоским затуплением, приходит в точку r = 0,2 раньше. Таким образом, процесс образования волны при полусферическом затуплении протекает медленнее, и связано это с тем, что сначала жидкость движется вдоль полусферической поверхности цилиндра. В случае же с плоским затуплением волна образуется сразу, как только тело вступает в контакт с жидкостью.
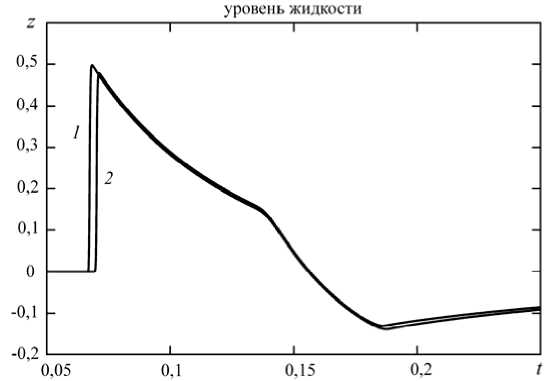
Рис. 3. Изменение уровня свободной поверхности в точке r = 0,2 в зависимости от формы затупления «головной» части цилиндра при значениях параметров Rb = 0,1 , Vb ,0 = 30 : плоский торец (кривая 1 ); полусферическое затупление ( 2 ).
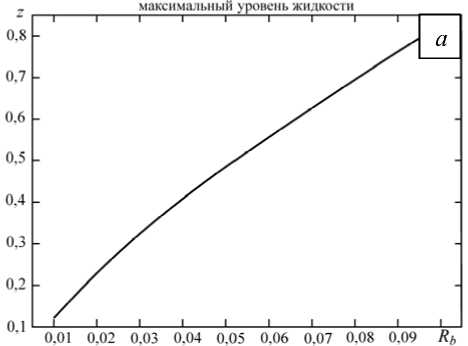
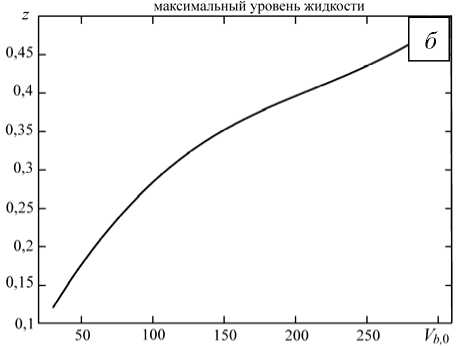
Рис. 4. Зависимость максимального значения амплитуды образованной волны от радиуса ( а ) и начальной скорости ( б ) цилиндра с полусферическим затуплением
Исследуем влияние радиуса цилиндра и его начальной скорости на амплитуду образованной волны. Поскольку форма затупления «головной» части не влияет на образование волны, во всех последующих расчётах рассматривается только цилиндр с полусферическим затуплением.
На рисунке 4, а показан график зависимости максимального уровня свободной поверхности от радиуса цилиндра R b е [ 0,01; 0,1 ] при начальной скорости погружения V b 0 = 30. Из рисунка 4, а видно, что максимальный уровень свободной поверхности находится в прямой зависимости от радиуса погружающегося тела, и чем больше радиус, тем большее уровень жидкости.
Влияние начальной скорости погружения цилиндра изображено на рисунке 4, б . График получен при расчётах с параметром R b = 0,01 и начальной скоростью погружения Vb0 е [ 30;300 ] . Здесь также видно, что чем больше начальная скорость цилиндра, тем больше максимальное значение амплитуды образованной волны. Совершенно ясно, что такая зависимость объясняется прямой связью: тело с бóльшей кинетической энергией вызывает бóльшее возмущение свободной поверхности. Рассмотрение этой зависимости в размерных величинах показывает, что, например, при погружении тела с радиусом в 10 м и начальной скоростью в 25 км/с в слой жидкости глубиной в 1 км образуется волна с амплитудой более 400 м.
Выясним, как параметры погружающегося тела связаны с понижением амплитуды A ([9]) образованной волны. В таблице представлены максимальные значения уровня свободной поверхности в точках r = 0,1; 0,2; 0,3; 0,4. В последней колонке находятся процентные отношения значения амплитуды в точке r = 0,4 к её же значению в точке r = 0,1. Видно, что понижение амплитуды отличается для волн, образованных при разных значениях модельных параметров, причём для тел с равными радиусами Rb понижение амплитуды происходит быстрее при бóльших Vb ,0 . Из сравнения вычислительных экспериментов 1 и 3 следует, что, несмотря на соответствие бóльшему Rb более высокой амплитуды образованной волны, понижение происходит схожим образом, то есть соответствующие этим экспериментам процентные отношения примерно совпадают. Всё это может говорить о том, что наиболее «катастрофичные» для удалённых объектов волны образуются при погружении тела с бóльшими размерами. Расчёты также показывают, что нельзя пренебрегать сопротивлением жидкости: понижение амплитуды волн, образованных с учётом сопротивления, происходит быстрее (см. эксперименты 3 и 4).
Таблица. Понижение амплитуды образованной волны
|
Номер вычислительного эксперимента |
Модельные параметры |
r |
А ^ -% А ( r 1 ) |
|||
|
r = 0,1 |
r = 0,2 |
r 3 = 0,3 |
r , = 0,4 |
|||
|
Значения уровня с учётом сопротивления |
||||||
|
1 |
R b = 0,07, V b ,0 = 30 |
0,470 |
0,269 |
0,193 |
0,151 |
32 |
|
2 |
R b = 0,05 V b ,0 = 100 |
0,485 |
0,252 |
0,173 |
0,132 |
27 |
|
3 |
R b = 0,05 V b ,0 = 30 |
0,263 |
0,152 |
0,102 |
0,087 |
33 |
|
Значения уровня без учёта сопротивления |
||||||
|
4 |
R b = 0,05 V b ,0 = 30 |
0,373 |
0,265 |
0,207 |
0,162 |
43 |
-
5. Заключение
Проведённые вычислительные эксперименты показали, что при погружении твёрдого цилиндрического тела в невозмущённую жидкость образуются волны, амплитуда которых находится в прямой зависимости от его радиуса и скорости. При этом влияние размера тела сказывается в бóльшей степени, чем влияние начальной скорости.
Построены зависимости максимальных значений амплитуды образованных волн от параметров тела. Проведено сопоставление распространения образованных волн с учётом и без учёта сопротивления жидкости, которое выявило особенности, позволившие сделать вывод: сопротивлением жидкости погружению твёрдого тела пренебрегать недопустимо.
Расчёты показали, что форма затупления погружающегося цилиндра не влияет на образование волны и её динамику. При расчётах форму «головной» части погружающегося тела можно не учитывать. Однако следует помнить, что при наличии у цилиндра плоского затупления образование волны происходит быстрее, чем при его полусферическом затуплении.
Хотя в рассмотренном процессе ключевым параметром, способствующим образованию волны с большой амплитудой, является размер тела, а именно радиус цилиндра, для образования катастрофически больших волн необходима огромная скорость его движения. Такой скоростью обладают тела из межпланетного пространства, и их падение в открытый океан является вполне реальным механизмом образования разрушительных волн.
Работа выполнена при финансовой поддержке РФФИ (проект
№ 11-01-98510-р_восток_а) и ДВО РАН (проекты № 09-1-П17-03, 11-III-В-03-037).
Список литературы Численное исследование генерации волн на поверхности при погружении твёрдого тела в жидкость
- Левин Б.В., Носов М.А. Физика цунами и родственных явлений в океане. -М.: «Янус-К», 2005. -360 с.
- Ward S.N., Asphaug E. Asteroid impact tsunami: a probabilistic hazard assessment//Icarus. -2000. -V. 145, N. 1. -P. 64-78.
- Crawford D.A., Mader C. Modeling asteroid impact and tsunami//Science of Tsunami Hazards. -1998. -V. 16, N. 1. -P. 21-30.
- Мезингер Ф., Аракава А. Численные методы, используемые в атмосферных моделях/Пер. с англ. -Л.: Гидрометеоиздат, 1979. -135 с.
- Yee H.C., Warming R.F. Implicit total variation diminishing (TVD) schemes for steady-state calculations//J. of Сomp. Рhys. -1985. -V. 57, N. 3. -P. 327-360.
- Асланов В.С. Пространственное движение тела при спуске в атмосфере. -М.: ФИЗМАТЛИТ, 2004. -160 с.
- Прандтль В.С. Гидроаэромеханика. -Ижевск: НИЦ «Регулярная и хаотическая динамика», 2000. -576 с.
- Роуч П. Вычислительная гидродинамика. -М.: «Мир», 1972. -600 с.
- Ландау Л.Д., Лифшиц Е.М. Теоретическая физика: Учебное пособие. В 10 т. Т. VI. Гидроаэродинамика. -М.: «Наука», 1986. -736 с.
