Динамика стержневой большой орбитальной космической системы цепочечной структуры

Автор: Вертипрахов И.А., Остапенко Е.Н., Репьях Н.А.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 4 (12), 2012 года.
Бесплатный доступ
Рассматривается математическая модель большой орбитальной космической системы (БОКС) цепочечной структуры. Приведено исследование движения 5-массовой системы. Предполагается, что длины стержней и массы точек равны. Система совершает движение в плоском центральном гравитационном поле. Приведено описание последовательных состояний системы в транспортирующей системе координат на промежутке одного оборота системы вокруг гравитационного центра.
Центральное гравитационное поле, голономная орбитальная система, транспортирующая система координат
Короткий адрес: https://sciup.org/14729817
IDR: 14729817 | УДК: 629.195.1
The dynamics of large orbital space system connected in a chain
The mathematical model of a large orbital space system (LOSS) connected in a chain is considered in this paper. Motion of 5-mass system is studied. It is assumed that the system consists of weighted points connected by rods and the lengths of the rods and the masses of the points are equal. The system is moved in the central gravitational field of the Earth. Successive states of the system in the moving coordinates during one revolution around the gravitational center of the Earth is described in the paper.
Текст научной статьи Динамика стержневой большой орбитальной космической системы цепочечной структуры
Особенностью поведения космических систем рассматриваемого вида является хаотический характер вращательных движений стержней в механической системе с большим числом степеней свободы. На параметры этого движения определяющее влияние оказывают массы точек, длины стержней, нелинейность гравитационного поля и дифференциальных уравнений движения системы и, естественно, начальные условия при численном моделировании [1, 2, 3].
1. Описание механической системыВывод уравнений движения
Рассматривается движение механической системы, состоящей из M (i = 1,2,..., n +1) материальных тел, соеди ненных последовательно n невесомыми стержнями с длинами lj (j = 1, 2,..., n). Тела принимаются за материальные точки мас-
сами m; ( i = 1, 2,..., n + 1 ) . Точки движутся в плоскости в центральном гравитационном поле. Длины стержней достаточно велики и такие, что позволяют называть систему S , образованную точками m , БОКС – большой орбитальной космической системой цепочечной структуры.
Движение механической системы S происходит под действием сил притяжения G к Земле:
-
- Mm. -
- Gi = -Y —3^Ri, (i = 1,2,..., n +1), (1) Ri
где у - гравитационная постоянная, M -масса Земли, m – масса i -го тела, R – радиус-вектор i -го тела. Сила G направлена от i -го тела к центру Земли.
Для построения математической модели движения БОКС рассматриваемой структуры введем неподвижную связанную с Землей систему координат OXY и зададим обобщенные координаты системы. Положение первого тела будем определять радиус- вектором R (t) и углом его поворота v(t) относительно оси OX . Положения остальных тел зададим углами рj (j = 1,..., n) отклонения стержней l относительно оси OX (рис. 1).
M 1 :
M :
X j = R ( t ) cos v ( t ) , yx = R ( t ) sin v ( t ) , x2 = X j + l j cos ^ ( t ) , . y 2 = y 1 + 1 i sin ^ 1 ( t ) ,
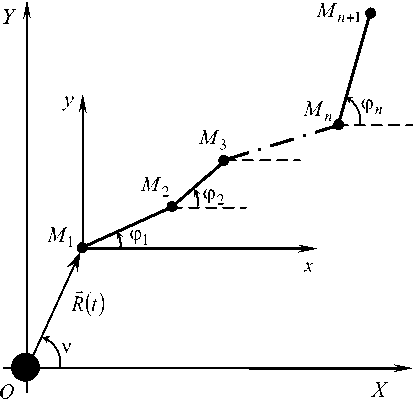
Рис. 1. Большая орбитальная космическая система цепочечной структуры
M n + 1 :
u i , ( i = 1
'x n + 1 = x n + l n cos ^ n ( t ) , . У п + 1 = У п + l n sin P n ( t ) -
Из равенств (4) определяются скорости
,...,
тел системы и значение
кинетической энергии T системы S :
u i = X\ + yi , n + 1 1 n + 1 , .
T = Z T . = 7 Z m i ( X 2 + y 2 ) , ■ (5)
i = 1 2 i = 1
( i = 1
,...,
Обобщенные силы Q определяются проекциями гравитационных сил Gi :
G xi
Mm x
—Y R
—
Mm x ■ Y / ,
Система S имеет в рассматриваемом случае n + 2 степени свободы, соответственно вектор-строка обобщенных координат q , описывающая положение механической системы, имеет n + 2 координаты qk :
q = { R ( t ) v ( t\ P 1 ( t \ —, Pn ( t )} • (2)
G yi
( i = 1
Mm y
—Y—
—
W22
Xi + yi
Mm y
■ Y / .
I / 22
W Xi + y i-
,..., n , n +1 f z^v
Q k = Z G x i + G
‘=1 [
d q k
yi
dr ] , d q k J
,
,
Дифференциальные уравнения движения БОКС как голономной механической системы могут быть представлены в виде уравнений Лагранжа II рода:
( k = 1,
...
, n + 2 ) .
d (dr ^ — - dt rqk J
.T = Qk, (k = 1, dqk
n + 2 ) , (3)
где T ( t , qk , qk ) - кинетическая энергия механической системы, q – обобщенные координаты, Q – обобщенные силы.
Запишем координаты тел механической системы в абсолютной системе координат XOY :
2. Исследование 5-массовой БОКС в транспортирующей системе координат
Исследование поведения системы проводилось на модели, состоящей из пяти тел. Определяющими параметрами системы S являются массы тел, длины стержней и начальные условия. Орбитальное движение системы M , M ,..., M задается движением первой точки, предполагая, что в начальный момент она находится на расстоянии R 3 + H от гравитационного центра и имеет начальную скорость, соответствующую круговой скорости для этого расстояния
U 0
у M
\ R 3 + H
где R 3 – радиус Земли, H – начальная высота точки M над поверхностью Земли.
Начальное состояние системы полностью определяется размером и положением дуги полуокружности, на которой расположены точки M , M ,..., M в начальный момент времени, система S движется мгновенно-поступательно.
Ниже приводится анализ движения БОКС из пяти точек, соединенных последовательно, в транспортирующей системе координат M xy [1, 2, 3] (рис. 1), при этом массы всех тел одинаковы и равны m , длины всех стержней одинаковы и равны l (при этом 4 1 << H ).
Система в начальном положении S 0 находится в четвертой четверти транспортирующей системы координат (ТСК), первая и пятая точки – на оси M y (рис. 2).
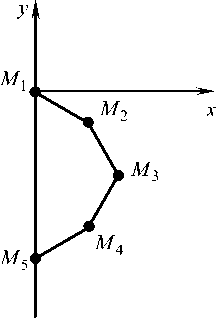
Рис. 2 . Начальное положение БОКС в ТСК
На первом этапе движения системы t e [t0, tj ] к моменту tx (рис. 3) происходит "выпрямление" – увеличение радиуса кривизны дуги, проходящей через точки M , M , M . Радиус кривизны дуги M M M увеличивается незначительно. Точка M незначительно смещается с оси M y в четвертую четверть ТСК. При этом угловая скорость первого стержня щ < 0, а угловые скорости других стержней щ > щ > щ > 0. Расстояние между точками M и M возрастает с 3000 м до 4000 м.
y
M 1 x
Рис. 3. Положение системы в момент времени t 1
На втором этапе t e[t{ , t 2 ] при сохранении знаков угловых скоростей стержней на первом этапе к моменту t (рис. 4) второй, третий и четвертый стержни практически располагаются вдоль прямой M M . Стержень M M проходит нижнее "вертикальное" направление, точка M оказывается в третьей четверти ТСК. Кривизна дуги M M M меняет знак по отношению к кривизне этой дуги на первом этапе. Таким образом, при t e [ t j, t 2 ] существует момент, когда точки M , M , M располагаются на одной прямой. Расстояние между точками M и M увеличивается до 4700 м.
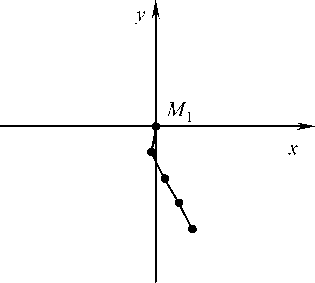
Рис. 4. Положение системы в момент времени t
На следующем этапе к моменту t меняется знак угловой скорости первого стержня MM^, соотношение щ > щ > щ сохраня- ется. Таким образом, все угловые скорости щ > 0 (i = 1,2,3,4). Система S остается в четвертой четверти ТСК, образуя фигуру выпуклостью "назад", пройдя состояние, близкое к симметричному по отношению к отрезку M M в начальном положении S , при условии, что этот отрезок составляет с осью минус M y угол порядка 700 . Расстояние между точками M и M уменьшается до 3500 м.
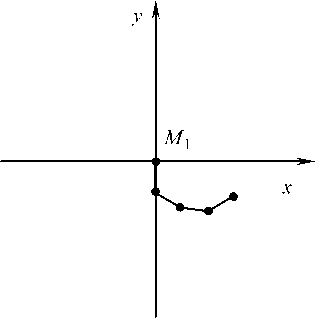
Рис. 5. Положение системы в момент времени t
На промежутке t e [ t 3, t 4 ] вращение четвертого стержня замедляется, щ & 0 . Соотношение между угловыми скоростями становится следующим:
щ > щ > щ > ^ 4 > 0. (8)
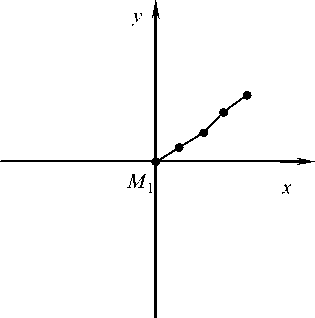
Рис. 6. Положение системы в момент времени t
Далее, при t e [ t 4, t5 ] условие (8) для угловых скоростей стержней системы S сохраняется. Все точки последовательно переходят из первой четверти во вторую, образуя симметричную относительно средней точки M фигуру с кривизнами k , k , k одного знака. Эта фигура, как и в начальном положении, снова обращена выпуклостью "вперед", в направлении вращения S вокруг опорной точки M .
Соотношение (8) между угловыми скоростями меняется на противоположное:
щ > щ > щ > щ , (9)
причем с увеличением щ происходит уменьшение щ до отрицательных значений в моменты t и t (рис. 8 и 9).
Система точек S переходит из четвертого квадранта ТСК в первый и к моменту t все точки системы, как и на втором этапе, располагаются практически на одной прямой, образующей с осью M^x угол ® 40 °. Расстояние M M близко к максимальному: M M 5 & 4 1 . Отклонения точек от прямой M M таковы, что дуги M M M и M M M , а также M M M имеют соответственно малые кривизны k , k , k чередующихся знаков, причем |k 21« | k 31,
I k i| < k 2I.
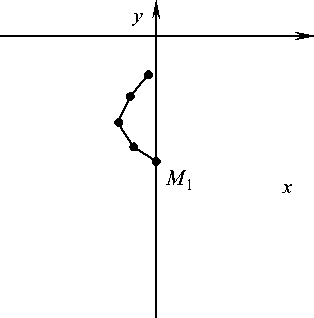
Рис. 7. Положение системы в момент времени t
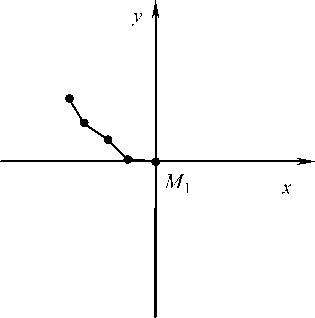
Рис. 8. Положение системы в момент времени t
На промежутке t е [t8, t9 ] и далее непрекра-щающееся изменение угловых скоростей к моменту t приводит к условию щ > щ > щ > щ. При этом на некоторых промежутках т = [t', t"]^[t9, tx0] в отличие от условия (8) щ < 0 .
Минимальное расстояние между точками M\M5 х 2 1 , достигнутое при трапециевидной форме S , увеличивается, ю4 растет. Отрезки l , l , l практически "выпрямляются" вдоль прямой M 1 M 4 . К моменту t система S приходит в третью четверть выпуклостью "вперед" вследствие малых значений
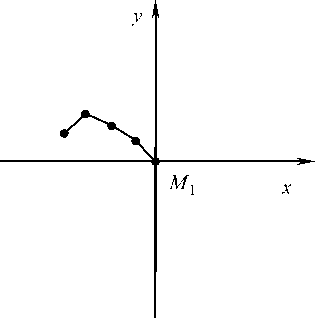
Рис. 9. Положение системы в момент времени t
Эти изменения угловых скоростей приводят к тому, что на момент времени t система S , оставаясь во второй четверти, образует трапециевидную фигуру, обращенную "выпуклостью" (меньшим основанием) "назад" (рис. 10).
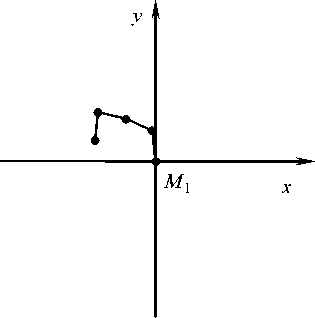
Рис. 10. Положение системы в момент времени t а 4.
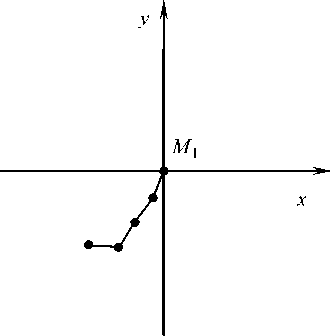
Рис. 11. Положение системы в момент времени t
Переход системы точек S из третьей четверти ТСК в четвертую происходит практически при равных щ > 0 с малым изменением относительного углового положения отрезков на предыдущем этапе t е [ t 9, t j0 ] .
Далее продолжается хаотическое движение точек системы с сохранением известных интегралов энергии и площадей для рассматриваемых условий орбитального движения.
Заключение
Математическая модель БОКС цепочечной структуры, описанная в данной работе, может быть использована для дальнейшего анализа больших космических систем.
Исследование движения 5-массовой системы проводилось численно с применением пакета Mathematica в предположении равных длин стержней, равных масс точек, мгновенно-поступательного начального состояния системы в плоском центральном гравитационном поле. Приведено описание последовательных состояний системы в транспортирующей системе координат на промежутке одного оборота системы вокруг гравитационного центра.
Создана визуализация движения 5-массовой системы.
Список литературы Динамика стержневой большой орбитальной космической системы цепочечной структуры
- Белецкий В.В., Новикова Е.Т. Об относительном движении связки двух тел на орбите//Космические исследования. 1969. Т.7. № 3.
- Белецкий В.В., Егоров В.А. Межпланетные полеты с двигателем постоянной мощности//Космические исследования. 1964. Т.2. № 3.
- Белецкий В.В. Очерки о движении космических тел. 3-е изд., испр. и доп. М.: URSS: Изд-во ЛКИ, 2009. 426 с.
