Функция ступора робота

Автор: Анисимова С.И.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 1 (44), 2019 года.
Бесплатный доступ
Вводится математическое определение ступора робота, на основе численных экспериментов исследуется модель ступора, описывается компьютерная программа вычисления такта, обеспечивающего наименьшее значение функции ступора робота при заданных коэффициентах памяти робота и его элементарных воспитаниях при равноценных эмоциях, приводятся примеры вычисления тактов и наименьших значений функции ступора робота, описывается возможное применение функции ступора.
Робот, воспитание робота, ступор, принятие альтернативного решения, математическая модель
Короткий адрес: https://sciup.org/147245416
IDR: 147245416 | УДК: 004.8:519.86.87 | DOI: 10.17072/1993-0550-2019-1-11-13
Stupor function of a robot
The article introduces a mathematical definition of the stupor function of a robot. Based on numerical experiments, the author studies the stupor model, describes a computer program for calculating the clock time that provides the smallest value of the robot’s stupor function for the given coefficients of the robot’s memory and its elementary upbringing with equal emotions. The paper provides examples of calculations made for the clock time and the smallest values of the robot’s stupor function, describes the possible uses of the stupor function.
Текст научной статьи Функция ступора робота
В работе [1] предложена математическая модель, описывающая ступор робота.
В монографии [2] показано, что существуют такие коэффициенты памяти робота, при которых эмоциональный ступор невозможен ни при каком такте. Такие коэффициенты памяти робота названы антиступорными коэффициентами. Расчеты, проводимые на основе математических моделей ступора, описанных в статье [1], показывают, что встречаются такие коэффициенты памяти робота, при которых возможен ступор при величине количества тактов, не равных натуральным числам. Однако согласно определению тактов [3], их количество должно принадлежать множеству натуральных чисел. Поэтому возникает задача определения количества тактов, при которых эмоциональное состояние робота, хотя и не удовлетворяющее точному определению ступора, близко к ступору.
Формула функции ступора робота
Нетрудно заметить [2], что условия наступления эмоционального ступора равномерно забывчивого робота с равноценными эмоциями на такте j описываются формула-
ми
71- q 2+qiei~r~a— q 2^2-;—2— = 0,(1)
q 1
1 - 01
1 - 0
- q 2
= 0,
где q – элементарное равноценное воспитание робота по положительным эмоциям, q – элементарное равноценное воспитание робота по отрицательным эмоциям, & - коэффициент памяти робота для положительных эмоций, 02 - коэффициент памяти робота для отрицательных эмоций.
Как было отмечено выше, система уравнений (1)–(2) не всегда имеет решение j в натуральных числах.
Запишем следующую функцию:
г
J ( j ) = q i - q 2 + q &
к
i - j i - %
- q 2 0 2
j \
1 0 2 7
+
r
+ qi к
i - & 1 i - 0 i
-

i - 0 2
1 17 2 7
.
Очевидно, что соотношение (3) является суммой квадратов невязок, определяющих приближение левых частей уравнений (1)–(2) к нулю, а, значит приближение к состоянию эмоционального ступора робота на такте j .
Назовем функцию (3) функцией ступора робота.
Для определения величины такта j , при котором невязка (3) при заданных значениях q i , q2 , 0 , 0 2 минимальна, необходимо решить следующую задачу: найти min J ( j ) , (4)
j где j = i, 2, 3,...
Таким образом, соотношение (3) описывает формулу ближайшего ступора робота (минимального значения функции ступора).
ступора, обеспечивающего минимальную невязку J ( j ) . Алгоритм работы программы основан на методе перебора количества тактов, удовлетворяющих условию j = i,2,3,..., j max .
Выбор языка программирования обусловлен возможностью создания удобного для неподготовленного пользователя интерфейса, а также малым объемом загрузочного модуля программы, равного 377 Кб. Программа функционирует в операционной системе не ниже версии Windows XP и требует компьютеры с небольшим объемом памяти.
На рисунке приведена главная форма программы с входными параметрами и возвращаемыми программой результатами вычислений.
Численные эксперименты
Для численного решения задачи (4) была разработана программа на языке программирования Delphi 6. Программа позволяет для входных параметров q , q (альтернативного элементарного воспитания), 0 , 0 (коэффициент памяти альтернативного воспитания), j определять номер такта j ближайшего
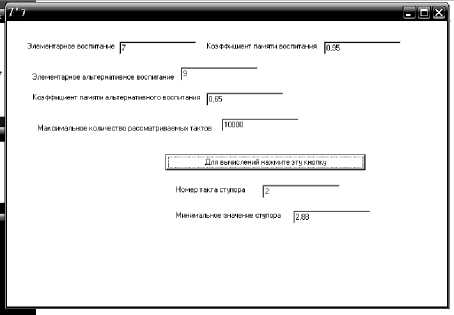
Главная форма программы
В таблице приведены некоторые значения j , являющейся решением задачи (3) при q i = 2 , q 2 = 7 , j max = i0000 и различных коэффициентах памяти 0 , 0 , а также величины min J ( j ) .
j
Параметры приближенного ступора
|
Коэффициент памяти 0 |
Коэффициент памяти 0 |
Номер такта j для минимального значения функции ступора |
Минимальное значение функции ступора |
|
0,05 |
0,05 |
1 |
50 |
|
0,2 |
0,05 |
23 |
47,4 |
|
0,25 |
0,05 |
27 |
44,2 |
|
0,3 |
0,05 |
33 |
40,7 |
|
0,3 |
0,1 |
31 |
48,4 |
|
0,35 |
0,05 |
36 |
36,8 |
|
0,35 |
0,1 |
37 |
44,2 |
|
0,4 |
0,05 |
45 |
32,5 |
|
0,65 |
0,05 |
90 |
5,47 |
|
0,65 |
0,1 |
89 |
8,516 |
|
0,7 |
0,05 |
113 |
0,985 |
|
0,75 |
0,05 |
9 |
0,02 |
|
0,75 |
0,45 |
132 |
44,7 |
0,85 0,8
41 0,03
Таким образом, данные, приведенные в таблице, не позволяют выявить какой-либо качественной закономерности при определении номера такта, обеспечивающего минимальное значение функции ступора робота, т.е. значения величин j и min J ( j) необхо-j димо рассчитывать отдельно для каждого из входных параметров q , q , θ , θ модели.
Заключение
В настоящей работе впервые введены понятие и формула функции ступора робота. Вычисление минимального значения этой функции можно использовать при прогнозировании поведения так называемых цифровых двойников, а также при создании компьютерных игр, персонажами которых являются двойники с заданными психологическими параметрами, например, такими, как их элементарные воспитания и коэффициенты памяти. Такты, соответствующие минимальному значению функции ступора робота, позволяют определить время, при котором перед цифровым двойником может возникнуть проблема выбора при принятии альтернативного пове- денческого решения. Очевидно, что чем меньше величина min J ( j) , тем острее стоит проблема выбора перед роботом (цифровым двойником).
Список литературы Функция ступора робота
- Черников К.В. Математические модели роботов с неабсолютной памятью: дис. … канд. физ.-мат. н., 2013. 138 с.
- Пенский О.Г., Шарапов Ю.А., Ощепкова Н.В. Математические модели роботов с неабсолютной памятью и приложения моделей: монография. Пермь: Изд-во ПермГУ, 2018. 310 с.
- Попов Н.В. Исследование математической модели конфликтов в группе роботов // Вестник Пермского университета. Математика. Механика. Информатика. 2016. Вып. 1(32). С. 10-15.
- Шарапов Ю.А. Общая математическая модель принятия решений роботом в зависимости от его эмоционального псевдовоспитания и логического опыта // Современные наукоемкие технологии. 2016. № 4-1. С. 62-66.
