Исследование программных подсистем для задач сенсорного мониторинга и управления экосистемами

Автор: Д. В. Гетманская
Журнал: Informatics. Economics. Management - Информатика. Экономика. Управление.
Рубрика: Информатика, вычислительная техника
Статья в выпуске: 4 (2), 2025 года.
Бесплатный доступ
В данной работе рассматривается потенциал использования программных датчиков в мониторинге сложных экологических систем. Интеграция современных технологий измерения и передовых вычислительных методов значительно расширила возможности программных датчиков, позволив осуществлять непрерывный и незаметный мониторинг экосистем. Система мониторинга и управления на основе моделей обеспечивает более высокую точность прогнозирования и оперативность, что важно для эффективного принятия решений. Также в настоящей статье представлен краткий обзор методологий разработки программных датчиков и обзор различных подходов к моделированию. Обсуждаются проблемы, связанные с самими экологическими системами: сложность, изменчивость и индивидуальные различия. Кроме того, в статье описываются проблемы, присущие подходу к моделированию на основе данных, в частности компромисс между сложностью модели и её производительностью. Программные датчики представляют собой значительный шаг вперёд в мониторинге и управлении экосистемами, позволяя принимать более взвешенные решения и оптимизировать процессы. По мере дальнейшего развития этих технологий сотрудничество между междисциплинарными командами будет иметь решающее значение для решения сложных задач, связанных с современными экосистемами.
Программные датчики, экосистемы, машинное обучение, мониторинг окружающей среды, программное обеспечение
Короткий адрес: https://sciup.org/14132680
IDR: 14132680 | УДК: 004.45:504.064.36:004.942:004.852 | DOI: 10.47813/2782-5280-2025-4-2-3032-3037
Текст статьи Исследование программных подсистем для задач сенсорного мониторинга и управления экосистемами
DOI:
Экосистемы - это сложные природные системы, которые включают в себя отдельные компоненты, взаимодействующие друг с другом и с окружающей их средой. Такие системы представляют собой сложные совокупности различных процессов. Чаще всего эти процессы нелинейны, и также существует значительная неопределённость в отношении их взаимосвязей. Всестороннее изучение, понимание и контроль над экосистемами требуют тщательного мониторинга и пристального наблюдения, чтобы разобраться в их сложности и использовать их потенциал. Мониторинг экосистем включает в себя систематический сбор и анализ данных. Исторически сложилось так, что мониторинг экосистем зависел от аппаратных датчиков, но ограничения в доступности и их высокая стоимость привели к более сложным подходам, что способствовало быстрому развитию программных датчиков, способных решать эти проблемы. Сложность мониторинга заключается в проблемах, связанных с физической доступностью и дороговизной исследований.
Один из способов решить эту проблему — использовать некоторые вспомогательные измеряемые [1] переменные для определения недоступных переменных процесса вместо прямого физического измерения этих переменных [1]. В этой статье рассматривается инновационное применение программных датчиков для мониторинга и управления экосистемами.
КОНЦЕПЦИИ МОНИТОРИНГАЭКОСИСТЕМ НА ОСНОВЕ МОДЕЛЕЙ
Мониторинг экосистем на основе моделей использует подход с программными датчиками, объединяя математические модели с данными датчиков [1]. На рисунке 1 показана общая схема системы мониторинга и управления биосистемами на основе моделей [1]. Главным элементом данной системы мониторинга является программный датчик. Он устраняет разрыв между измеряемыми и целевыми переменными за счёт возможного представления направленной переменной.
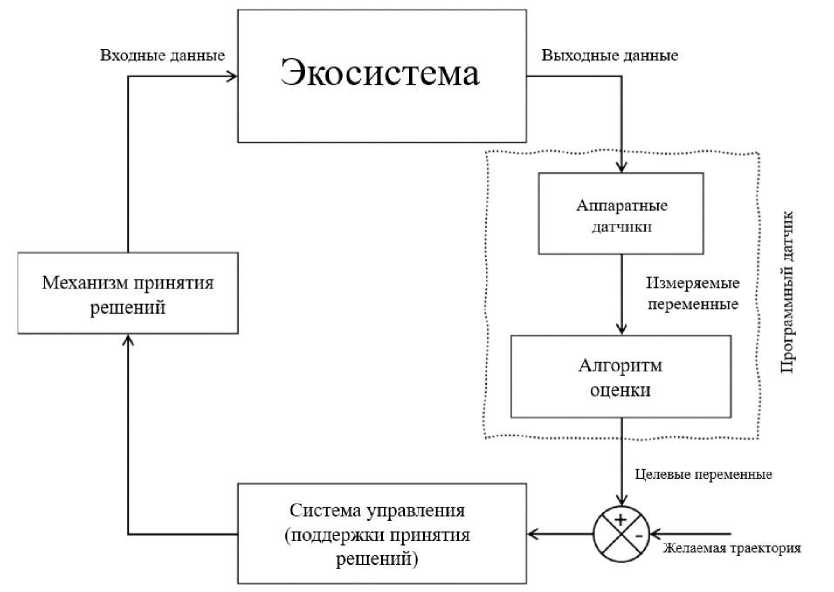
Рисунок 1. Общая схема мониторинга биосистем на основе моделей и концепция аппаратных и программных ДАТЧИКОВ .
figure 1. the general scheme of monitoring biosystems based on models and the concept of hardware and software sensors.
ПРОГРАММНЫЕ ДАТЧИКИ
Концепция программных датчиков основана на идее оценки важных целевых переменных экосистемы путём объединения данных, полученных с помощью аппаратных датчиков, с моделью. Как показано на рис. 1, датчик состоит из двух основных компонентов: аппаратного датчика и программного компонента.
Во многих приложениях для управления необходимо оценивать внутреннее состояние динамической системы, которое трудно измерить для целей управления. Методы оценки состояния могут быть детерминированными («наблюдатели состояния») или стохастическими (байесовская фильтрация). Кроме того, принцип работы программного датчика тесно связан с концепцией косвенного управления, предложенной в 70-х годах Бросилоу [2]. В схеме косвенного управления управляемая переменная не измеряется напрямую, а оценивается по косвенным измеряемым переменным. В этом контексте программный датчик представляет собой комбинацию измеренных переменных, на основе которых делается вывод.
Государственные наблюдатели и фильтры Калмана
Наблюдатели за состоянием и фильтр Калмана широко известны как самые ранние и наиболее часто используемые формы программных датчиков. Их основополагающая роль в этой области обусловлена их надёжными возможностями в оценке неизмеряемых параметров состояния и широкой применимостью в различных областях. В теории систем и управления динамическая система часто описывается моделью пространства состояний «вход-выход», которая представляет собой дифференциальное уравнение первого порядка относительно переменных состояния для систем с непрерывным временем. Входные переменные передают энергию или силу, позволяя изменять переменные состояния, а выходные сигналы являются результатами работы системы. Наблюдатель состояния оценивает внутренние состояния динамической системы на основе доступных измерений и входных переменных.
Ниже в качестве наглядного примера рассматривается широко используемый наблюдатель Люенбергера. Рассмотрим линейную модель пространства состояний с дискретным временем:
x(k + 1) = Ax(k) + Bu(k) (1)
где y(k) = Cx(k), a A , B и C — постоянные матрицы.
Второе уравнение описывает, как формируются выходные данные y(k). В наблюдателе Люенбергера разница между прогнозируемыми выходными данными j/(k) вычитается из измеренных выходных данных y(k), а затем усиливается с помощью матрицы постоянного усиления L для коррекции и уточнения оценок переменных состояния, как описано в приведённом ниже уравнении.
x(k + 1) = Ax(k) + Bu(k) + L[y(k) - y(k)] (2) где y(k) = Cx(k).
Фильтр Калмана описывает рекурсивный метод оценки состояния линейной динамической системы по серии измерений с гауссовским шумом. Рассмотрим линейную систему с дискретным временем:
xk = Axk-i + Buk + шк (3)
yk = Ctx^+V n (4)
где xk-1 обозначает состояние в момент времени k — 1, а xk, uk-1 и yk-1- состояние, управляющие входные данные и измеренный выходной сигнал в момент времени k соответственно. Цель фильтра Калмана — определить распределение вероятностей состояния x в момент времени k.
Существуют различные разработки и модификации фильтра Калмана, предназначенные для разных типов систем и характеристик шума:
-
• Фильтр Калмана без запаха [3]: устраняет
некоторые ограничения путем аппроксимации среднего значения и ковариации с помощью набора тщательно выбранных точек выборки, а не линеаризации.
-
• Расширенный фильтр Калмана [4,5]:
линеаризует нелинейную систему на каждом временном шаге в соответствии с текущим средним значением и оценкой ковариации, а затем применяет стандартные уравнения фильтра Калмана.
-
• Ансамблевый фильтр Калмана [6,7]: это расширение для работы с
крупномасштабными системами, использующее метод Монте-Карло с конечным числом членов ансамбля.
• Частичный фильтр
[8]: это
непараметрический фильтр, представляющий оценку состояния в виде набора взвешенных частиц.
Проектирование программного датчика
В зависимости от подхода к моделированию, используемого в алгоритмах оценки, программные датчики можно разделить на два подтипа: гипотетико-дедуктивный и индуктивный подходы.
Гипотетико-дедуктивный подход к моделированию предполагает определение априорных концептуальных структур модели на основе исходных принципов и предположений, вытекающих из устоявшихся научных парадигм [9]. Однако этот подход часто требует обширных знаний в предметной области и подробных данных, что может быть ограничением в сложных или плохо изученных системах.
С другой стороны, индуктивное моделирование направлено на выявление закономерностей непосредственно в данных наблюдений.
Разработка программного датчика включает в себя несколько важных этапов:
-
• сбор данных;
-
• выбор вспомогательных переменных и
- характеристик;
-
• моделирование, проверку и тестирование
модели;
-
• реализацию.
Выбор методов моделирования зависит от характера переменной, которую необходимо оценить. Если целевая переменная является непрерывной обычно используется регрессионная модель. С другой стороны, если целевая переменная является дискретной, то используют модель классификации.
РЕКОМЕНДАЦИИ ПО РАЗРАБОТКЕ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ДЛЯ ДАТЧИКОВ
При разработке программного обеспечения для мониторинга экологических систем важно выбрать модели, способные включать стохастические элементы:
-
• Байесовские сети;
-
• Статистические модели;
-
• Модели глубокого обучения.
Ошибка прогнозирования модели, которая измеряет разницу между фактическими и целевыми значениями, состоит из трёх компонентов:
-
• Ошибка дисперсии;
-
• Ошибка смещения;
-
• Шум.
На рисунке 2 приведена схема взаимосвязи между сложностью модели и погрешностью прогноза.
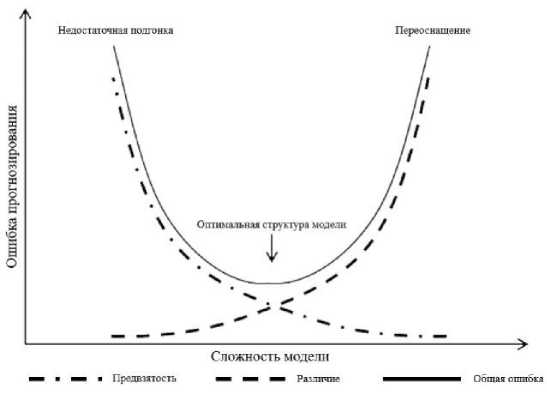
Рисунок 2. Взаимосвязь между сложностью модели и погрешностью прогноза.
Figure 2. The relationship between model complexity and forecast error.
В процессе разработки программных датчиков также важно тщательно учитывать интерпретируемость выбранной модели на основе данных. Интерпретируемая модель даёт чёткое представление о том, как входные признаки математически соотносятся с целевыми результатами. На рисунке 3 представлен общий вид взаимосвязи между интерпретируемостью и точностью модели. Но данное сравнение является упрощением, и фактическая производительность может варьироваться в зависимости от конкретных наборов данных. Возьмём, к примеру, модель линейной регрессии, которая является распространённым примером интерпретируемой модели:
У = dg + d^X^ + U2X2+... +cinXn + e, (5)
где ϒ — целевой результат, который напрямую связан с входными переменными {X 1 ,X 2 ,.. . ,Xn}, а коэффициенты {d ! , d2,..., сп}количественно определяют вклад каждой входной переменной.

Линейная регрессия
к
В

Логистическая регрессия
Дерево принятия решений
0 Метод KNN
О “Случайный лес”(метод машинного обучения)
Модуль управления
Нейронные сети (глубокое обучение)
Точность модели

Рисунок 3. Компромисс между интерпретируемостью и точностью при моделировании на основе данных: по МЕРЕ УВЕЛИЧЕНИЯ СЛОЖНОСТИ МОДЕЛИ ТОЧНОСТЬ ЧАСТО ПОВЫШАЕТСЯ , НО СТРАДАЕТ ИНТЕРПРЕТИРУЕМОСТЬ . Figure 3. The trade-off between interpretability and accuracy in data-driven modeling: as the complexity of the model increases, accuracy often increases, but interpretability suffers.
Как правило, в сценариях, где прозрачность и понятность имеют решающее значение, предпочтение отдаётся моделям, которые легко интерпретировать.
ЗАКЛЮЧЕНИЕ
В данной статье был рассмотрен потенциал использования программных датчиков в мониторинге сложных экологических систем. Программные датчики, объединяя данные традиционных датчиков с передовыми вычислительными моделями, могут определять переменные, которые трудно измерить напрямую. Традиционные методы измерения часто не позволяют получить все необходимые данные из-за физической недоступности и высокой стоимости. Программные датчики могут устранить эти пробелы, объединяя данные аппаратных датчиков с моделями оценки и вычислительными алгоритмами, что позволяет точно определять целевые переменные. Интеграция усовершенствованных технологий измерения и передовых вычислительных методов значительно расширила возможности программных датчиков, позволив осуществлять непрерывный и незаметный мониторинг экосистем. Система мониторинга и управления на основе моделей обеспечивает более высокую точность прогнозирования и оперативность, что важно для эффективного принятия решений. Также в данной работе представлен краткий обзор методологий разработки программных датчиков и обзор различных подходов к моделированию, в котором описываются основные различия между гипотетико- дедуктивными и индуктивными моделями. Подробно рассматриваются преимущества программных датчиков. Обсуждаются проблемы, связанные с самими экологическими системами: сложность, изменчивость и индивидуальные различия. Кроме того, в статье описываются проблемы, присущие подходу к моделированию на основе данных, в частности компромисс между сложностью модели и её производительностью. В заключение стоит сказать, что выбор наиболее подходящего метода моделирования должен соответствовать конкретным целям разработки программного датчика, обеспечивая баланс между точностью, интерпретируемостью и способностью адаптироваться к динамичной природе экосистем. Программные датчики представляют собой значительный шаг вперёд в мониторинге и управлении экосистемами, позволяя принимать более взвешенные решения и оптимизировать процессы. По мере дальнейшего развития этих технологий сотрудничество между междисциплинарными командами будет иметь решающее значение для решения сложных задач, связанных с современными экосистемами.
