Комплексные представления для расчета механических систем при гармонических процессах

Автор: Попов И.П.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 3 (50), 2020 года.
Бесплатный доступ
Отмечено, что традиционный расчет механизмов при вынужденных колебаниях зачастую представляет собой непростую задачу. Чаще всего расчетчиков интересуют установившиеся режимы колебаний. Целью работы является значительное упрощение вычислений путем замены необходимости решения дифференциальных уравнений на алгебраические методы. Подобный подход широко используется в электротехнике. Использование символического (комплексного) описания механических систем при вынужденных гармонических колебаниях (в установившемся режиме) позволило отказаться от чрезвычайно громоздкого и трудоемкого алгоритма расчета, связанного с решением дифференциальных уравнений и заменить его простыми и наглядными алгебраическими операциями. Благодаря этому время расчетов уменьшается в разы. Векторные диаграммы, не являясь необходимой составляющей исследования механических систем, имеют существенное методическое значение, поскольку показывают количественные и фазные соотношения между параметрами систем.
Потребители механической мощности, вынужденные колебания, параллельное, последовательное соединение, резонанс сил, резонанс скоростей
Короткий адрес: https://sciup.org/147245493
IDR: 147245493 | УДК: 531.8 | DOI: 10.17072/1993-0550-2020-3-66-78
Complex concepts for calculation of mechanical systems in harmonic processes
It is noted that the traditional calculation of mechanisms for forced vibrations is often a difficult task. Most often, calculators are interested in steady-state modes of oscillation. The aim of the work is to significantly simplify calculations by replacing the need to solve differential equations with algebraic methods. This approach is widely used in electrical engineering. The use of a symbolic (complex) description of mechanical systems with forced harmonic oscillations (in a steady state) made it possible to abandon the extremely cumbersome and laborious calculation algorithm associated with solving differential equations and replace it with simple and visual algebraic operations. Thanks to this, the calculation time is reduced significantly. Vector diagrams, while not being a necessary component of the study of mechanical systems, have significant methodological significance, since they show quantitative and phase relationships between the parameters of systems.
Текст научной статьи Комплексные представления для расчета механических систем при гармонических процессах
Традиционный расчет механизмов при вынужденных колебаниях зачастую представляет собой непростую задачу [1–3].
Чаще всего расчетчиков интересуют установившиеся режимы колебаний [4–6].
Целью работы является значительное упрощение вычислений путем замены необходимости решения дифференциальных уравнений на алгебраические методы. Подобный подход широко используется в электротехнике.
Схема параллельного соединения
Скорость элементов механической системы одинаковая (рис. 1):
v = V sin юt.(1)
При этом силы отличаются: dv f = m = mю V cos юt,(2)
m dt
k fk = -kx = k vdt = - V cos юt,(3)
ю
f
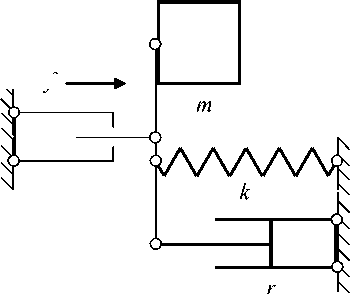
Рис. 1. Схема параллельного соединения fr = rv = rV sin юt.(4)
Результирующая сила:
f = f m + f k + fr =
k I .
m ю-- I cos ю t + r sin ю t mJ
k x = m ю.
= V
= V


+ r2
( m ю- k /ю ) cos ю t
Если x = 0 , то ю = ^ к/m - классическое
I
m ю- к/ ю ) 2
+ r2
+
r sin ю t
+ । 2 = ■
( m ю- к/ ю ) + r 2
Удобно ввести обозначение , m ю- к/ ю ф = arctg--------- r
выражение, полученное значительно проще классического решения. При этом происходит резонанс сил [10]. При r = 0 , z = 0 . Механизм не препятствует источнику колебаний.
По аналогии с электротехникой r – механический резистанс (resistance).
Комплексное описание для параллельной схемы соединения
При этом f = V(mmю-к/ю)2 + r2 (sinФcosюt +
+ cos p sin ю t ) =
= V ( m m ю- к/ ю ) 2 + r 2 sin( ю t + ф ) = F sin( ю t + ф ) .
(6) Это классическое выражение (результат решения дифференциального уравнения).
В рассматриваемом случае необходимость в дифференциальном уравнении не возникает.
Амплитуда результирующей силы:
F = Vz , (7)
z = ^(m ю- к/ ю ) 2 + r 2 ( кг • с ^. (8)
Первая (максвелловская) система механо-электрических аналогий имеет вид:
-
- V ^ I (скорость ^ ток),
-
- F ^ U (сила ^ напряжение),
-
- m ^ L (масса ^ индуктивность),
-
- к ^ 1 C (коэффициент упругости ^
величина обратная емкости),
-
- r ^ R (коэффициент вязкого сопротивления ^ сопротивление).
Американский физик Вебстер дополнил эти аналогии:
-
- ю m ^ ю L ( инертный реактанс ^ индуктивное сопротивление) [7–9 ] ,
-
- к/ ю^ 1/( ю C ) (упругий реактанс ^ емкостное сопротивление).
Учитывая приведенные механо-электрические аналогии, формула (7) является аналогом известного закона Ома
U = IZ .
здесь Z = ^[ ю L - 1( ю C ) ] 2 + R 2 - сопротивление. Таким образом, формула (8) – это механический импеданс (impedance).
Соответственно этому механический реактанс (reactance):
Синусоидальная величина имеет следующую форму записи:
a = A sin( ю t + ф ) = Im ^ Ae' ( ю t +ф ) ^ .
Здесь Ae ( “ t +ф ) - комплексный вектор.
Такие векторы, как правило, записыва ют для момента t = 0. В соответствии с этим
Ae'(ю0+ф) = Ae'ф = A принято считать комплексной амплитудой.
Формула (1), таким образом, имеет следующий вариант записи:
v = V sin ю t = Im( Ve ' “ t ) ,
•
V = Ve ' 0 .
Из выражения (2) следует, что v отстает по фазе от fm на п/2 .Таким образом,
-
• • ' - •
F m = m ю Ve 2 = x m V .
' - xtn = ю me 2 = ' ю m . (9)
Это инертный реактанс в комплексной записи.
Несинусоидальные величины в комплексном представлении подчеркивают (синусоидальные отмечают точкой).
Амплитуда инертной силы (в комплексном изображении) имеет вид:
пп
Fm = ю me 2 Ve ' 0 = ю m Ve 2 .
Точно также, имея в виду (3) и (4),
-
• k ' ' -•
Fk = —Ve 2 = x ^ V .
ю к i- к - i- x =-Le 2 = ±e 2 =-'!..(10)
ю юю
Это упругий реактанс в комплексной записи.
Fr = rV = rV .
r = r .
Это резистанс в комплексной записи.
В соответствии с этим амплитуды упругой и резистивной сил (в комплексном изображении) имеют вид:
• к - i П к - i П
Fk = -e 2 Vel 0 = kVe 2 . ю ю
Fr = rV = re 0 ve 0 .
Комплексные представления механи-
ческих реактанса и импеданса:
x = x,
+ x =
„ - У ‘I m ю--I e 2 ю )
k У ‘П z = r + x = r + m ю - e2
.
< ю)
Абсолютная величина последнего совпадает с (8)
2 j.1 k
Z = r +1 тю--
.
У \ ю)
Фаза импеданса определяется формулой (5), поэтому
z = Ze' i ^ .
Сила внешнего источника имеет вид: F = zV = zve i ф . (11)
Это подтверждается формулой (6).
Пример 1. F = 100 e i 0 (Н), ю = 2 рад/с , m = 10 кг , k = 20 ( кг • с “2), r = 7( кг • с -1).
Определить все остальные параметры.
xm =ю me 90 ° = 20 ei 90 ° ( кг • с ) ,
x = -e- i 90 ° = 10 e -‘ 90 ° ( кг • с -1). ю
Z = ^ r 2 + ( x m - x k ) 2 =
= J7 2 + ( 20 - 10 ) 2 = 12,207 ( кг • с ) .
xm - x 20 - 10
Ф = arctg —---k = arctg------= 55° , r7
z = Ze ‘ 9 = 12,207 e ‘ 55 ° ( кг • с ) .
-
• 0
V = - = 00 e « 8,192 e-‘ 55° (м • с -1 ), (12)
z 12,207 e i 55
-
- m = x m V =
= 20 e i 90 ° • 8,192 e -1 55 ° = 163,846 e i 35 ° (Н),
-
- k = x - V =
= 10 e■190° • 8,192 e"1 55 ° = 81,923 e"1 145 ° (Н),
-r = rV = 7e i 0 • 8,192 e -‘ 55 ° = 57,344 e -‘ 55 ° (Н).
Как и следовало ожидать,
-m + -k + -r= 163,846 e i 35 ° + 81,923 e - ‘ 145 ° +
+ 57,344 e - i 55 ° = 100 e i 0 (Н) = - .
Расчет с применением дифференциальных уравнений занял бы несколько страниц.
Данным примера 1 соответствует векторная диаграмма на рис. 2.
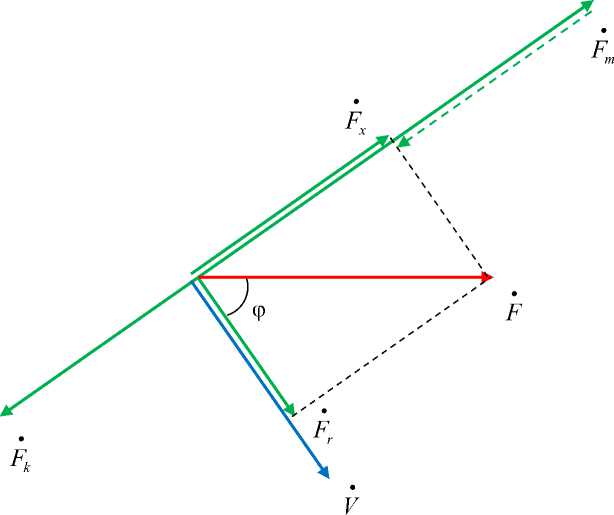
Рис. 2. Параллельное соединение
Пример 2. Для резонанса сил . Отличие от примера 1 состоит в том, что k = 40 ( кг ■ с - 2).
x = 20 e-i 90 ° ( кг ■ с -'), z = r = 7 ei 0 ° ( кг ■ с ~'), •
V = F = 1^- - 14,286 ei 0 ° (M ■ с -1 ), z 7 ei 0
Fm = x,V = 20 e i 90 ° ■ 14,286 e i 0 ° = 285,72 e i 90 ° (Н), F k = XV =
= 20 e’ i 90 ° ■ 14,286 e i 0 ° = 285,72 e"i 90 ° (Н),
Fr = rV = 7 e i 0 ■ 14,286 e i 0 ° = 100 e i 0 ° (Н).
Как и следовало ожидать,
Fm + Fk + F = 285,72 e i 90 ° + 285,72 e - i 90 ° + + 100 e i 0 ° = 100 e i 0 (Н) = F = Fr .
Данным примера 2 соответствует векторная диаграмма на рис. 3.
Схема последовательного соединения
Сила на элементах механической системы одинаковая (рис. 4):
f = F cos C) t .

Рис. 4. Схема последовательного соединения
При этом скорости отличаются:
1F vm = fdt =---sin ю t, mю vk
1 , dx 1 df ю
— k =—— =sir k dt k dtk fF vr = — = — cos юt .
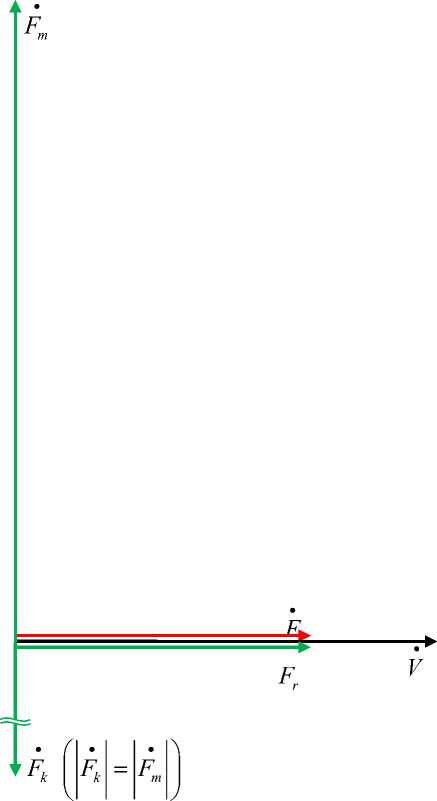
Рис. 3. Резонанс сил
Результирующая скорость:
v = v m + v k + v r =
= F

ю V .1
— I sin ю t + -cos ю t k J r
= F [1/ ( ю m ) - ю/ k ] 2 + (1/ r )2 x
1( ю m ) - ю/ k
[ 1( ю m ) - ю/ k ] 2 + (1/ r )2
1 r
+ , cos ю t .
VI [ 1( ю m ) -ю/ k ]2 + (1 r ) 2 _
1 (ю m) - ю/ k ф = arctg n J---— .
1r v = F[1/(юm) - ю/k ]2 + (1/r)2 x x(sin ф sin ю t + cos ф cos ю t) =
= F [ 1/( ю m ) - ю/ k ] 2 + (1/ r )2 cos( ю t - ф ) = = V cos( ю t - ф ) .
Это выражение синусоидальной скорости для схемы последовательного соединения элементов механической системы.
Амплитуда результирующе скорости:
V = Fy, y = V[V^m)-ю/k]2 + (Vr)2. (16)
Из условия 1/(ю m) — ю/ k = 0 следует классическое выражение ю = ^k/m , получен- n
I ю 1 1 ■ у = g + b = g + 1 ----I e 2
- ( k ю m J ное значительно проще классического решения. При этом происходит резонанс скоростей [10]. При 1/r = 0, у = 0. Механизм препятствует (абсолютно) источнику колебаний.
Абсолютная величина последнего сов- падает с (16):
Y =
jg 2 + ( Ьк — bm ) =


Комплексное описаниедля последовательной схемы соединения x bk — bm x ю/k — -(юm)
Ф = arctg ----m = arctg —----—---- = gg
Алгоритм рассмотрения такой же, как и при параллельном соединении:
f = F cos ю t = Re( Fe i “ t ),
• i n
F = Fe 2 .
Из выражения (13) следует, что f опе- режает по фазе vm на п/2 .Таким образом,
• 1 • i П
V m =-- Fe 2
ю m
m ю m
п
- i —
••
= - F = b m F . x
— i-- = —.
ю m x„
Это инертный сассептанс (susceptance) комплексной записи.
в
Амплитуда инертной скорости (в комплексном изображении) имеет вид:
• 1 — i П i П 1 „
Vm =--- e 2 Fe 2 =--- Fe 0 .
ю m ю m
Точно также, имея в виду (14) и (15),
= arctg
r
(m ю — k/ ю) — mk у = Yeф .
Скорость штока внешнего источника имеет вид:
• • . i П i ( Ф+П )
V = yF = Yei ’ Fe 2 = YFe 2 . (17)
Пример 3. Отличие от примера 1 состоит в том, что элементы соединены после- довательно.
b m = x m = 5 - 10 — 2 e"i 90 ° ( кг -1 • с ), b = x 4 = 10 - 10 — 2 ei 90 ° (кг -1 • с), g = r-1 = 14,286 - 10 — 2 ( кг — 1 • с ).
Y = Jg 2 + ( b k — b m ) 2 =
= A/(i428640 - 2 ) 27 ( i040 - 2^ 5^ =
= 15,135 - 10 — 2 ( кг — 1 • с ) .
• ro • i П 1 • •
V =- Fe 2 = — F = bF . kx
+ bk — b Ф = arctg —---- g
i b =-e 2 kk
. ю 1
= i— = — .
kx
x 10 •Ю—2 — 5 •Ю—2 1П^О
= arctg------------ :— = 19,29 ° ,
14,286 •Ю — 2
Это упругий сассептанс в комплексной запи- у = Yeiф = 15,135 •Ю—2ei 19,29° (кг—1 • с).
си.
В соответствии с этим амплитуды упругой и резистивной скоростей (в комплексном изображении) имеют вид:
П
-
•i- i-
- V =- e 2 Fe 2 =- FeП. kkk
-
• 1 • •
Vr = -F = gF = gFe 2 .
r
1 g = g =- . r
Это кондактанс (conductance) в комплексной записи.
Комплексные представления механических сассептанса и адмитанса (admittance):
П
I ю 1 1 i 7
b = b + bn =1---I e 2 ,
( k ю m J
• •
V = yF =
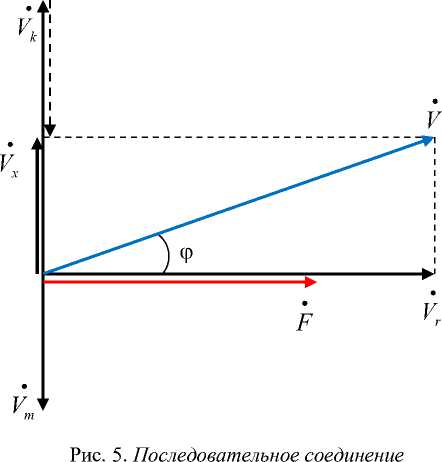
=15,135 • 10 — 2 ei 19,29 ° • 100 = 15,135 ei 19,29 ° (м • с — 1 ), Vm= bF = 5 • 10 — 2 e~i 90 ° • 100 = 5 e~i 90 ° (м • с — 1 ), V = bF = 10 • 10 — 2 ei 90 ° • 100 = 10 ei 90 ° (м • с — 1 ), Vr = gF = 14,286 • 10 — 2 • 100 = 14,286 (м • с — 1 ).
Как и следовало ожидать,
Vm + Vk + Vr = 5 e — i 90 ° + 10 ei 90 ° + + 14,286=15,135 ei 19 , 29 ° (м • с — 1 ) = V .
Расчет с применением дифференциальных уравнений занял бы несколько страниц.
Данным примера 3 соответствует векторная диаграмма на рис. 5.
Связь между механическими величинами
Теорема 1. Имеет место выражение: 1
y — I.
Доказательство . С учетом (11)
•
F
z —
— •
V
С учетом (17)
.
•
V 1 y — “ —_
F z
Теорема доказана.
Следствие. При r — 0
.
Пример 4. Для резонанса скоростей . Отличие от примера 2 состоит в том, что элементы соединены последовательно.
b — 5 •Ю — 2 e 90 ° (кг 1 • с),
Y = g = 14,286 •Ю—2 (кг-1 • с), ф — 0°, y — Yei’ = 14,286 • 10-2ei0° (кг-1 • с),
V — yF = 14,286 • 10 — 2 • 100 = 14,286 ei 0 ° (м • с - 1 ),
V — bF = 5 • 10 — 2 e i 90 ° • 100 = 5 e i 90 ° (м • с - 1 ).
Как и следовало ожидать,
Vm + V + V = 5 e - i 90 ° + 5 e 90 ° + 14,286=
=14,286 e‘ 0 ° (м • с - 1 ) = V — Vr
Данным примера 4 соответствует векторная диаграмма на рис. 6.
-
•.
V k
•
V
I► g►
••
FV
Так как при этом y — b , z — x .
Теорема 2. Для обратных эквивалентных величин имеют место выражения:
r g * — 222
n
x b * = 2----2 e 2, g r, g + b b— x * — —?----ee 2. “ g2 + b2
Доказательство .
У =
z
— — r + x — r + ix ,
1 r — ix _ r — ix r + ix r — ix r2 + x2
r
2 . 2
r 2 + x 2
—
i 2x 2 — g * + b *, r + x
У = g + b — g + ib ,
-
1 1 g — ib g — ib
— — — — 2 2*
y g + ib g — ib g + b
g g2 + b2
—
i , = r * + x *.
g 2 + b2 “
Теорема доказана.
Теорема 3. Для схемы последовательного соединении механических систем имеет место выражение: n y—E y} • j—1
Доказательство . На все составляющие механические системы воздействует одна си-
ла F . Для любой из механических систем учетом (17) можно записать
с
•
•
V j = y j F .
В соответствии с принципом суперпозиции
• n • n • • n
•
V = E V j = E y j F = F E У = Fy .
Теорема 4. Для схемы параллельного соединении механических систем имеет место вы ражение: z = Ez, • j=1
Доказательство . Все составляющие механические системы имеют одну скорость •
V . Для любой из составляющих механических систем с учетом (11) можно записать
j = 1 j = 1
Теорема доказана.
j = 1
•
•
F, = ZV .
1 n 1
Следствие 1 — = E — z J = 1 Z j
В соответствии с принципом суперпозиции
• n • n • • n
•
F = E F = E Z j V = V E Z j = Vz .
j = 1 j = 1
j = 1
n
П Zj
Следствие 2. z = j = 1
nn
.
k = 1 j = 1 j * k
Следствие 3. Импеданс любой из
со-
ставляющих механических систем больше эквивалентного импеданса.
Теорема доказана.
1 n 1
Следствие 1. — = E—
У 'м y j
n
П yj
Следствие 2. y = j = 1
nn
■ EП yj k=1 j=1 j * k
.
Следствие 4. Если
Z = Z =
...
= Z,- =
.
.
.
= Z n = Z *, то
z *
Z = — n
.
Следствие 3. Адмитанс любой из составляющих механических систем больше эквивалентного адмитанса.
Следствие 4. Если
Следствие 5.
У 1 = У 2 =
...
=yj =
...
lim z = zi^w
n
П Zj j=2
nn
.
Следствие
y *
= У п = У *, то У = ^ n
.
5. lim y = y j ^®“
n
П yj j— nn ЕП- y j k = 2 j = 2 j * k
.
ЕП zj k=2 j=2 j * k
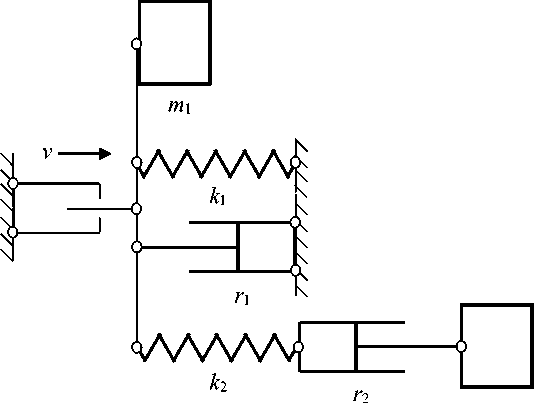
m 2
Рис. 7. Схема параллельно-последовательного соединения
Схема параллельнопоследовательного соединения (рис. 7)
С учетом теоремы 1
Z 2 = 1 y 2 .
С учетом теоремы 4 z = z + z . С учетом (11) V = F/z .
Пример 5. F = 100el0 (Н), ® = 2 рад/с, m = 10 кг, k = 20( кг • с-2), r = 7( кг • с-1).
Определить все остальные параметры.
Z = 1/ у = 1/(15,135 •ю-2 ei 19 , 29 ° ) « « 6,607 e-‘ 19,29 ° (кг • с - 1 ), Z = Z + Z = 12,207 e 55 ° + 6,607 e ’ ‘ 19,29 ° = = 15,372 e 3057 ° (кг • с - 1 ),
V = F/z = 100/(15,372 e 30 ,5 7 ° ) = = 6,505 e-' 30,57 ° (м • с - 1 ), F m 1 = x m 1 V = 20 e 90° • 6,505 e - 30,57 ° = = 130,1 e 59,43 ° (Н),
F = & V = 10 e- i 90 ° • 6,505 e’ i3057 ° =
= 65,05 e-' 120,57 ° (Н),
Fri = rV ^ = 7 e i 0 • 6,505 e - ‘ 30 57 ° =
= 45,535 e - i 30,57 ° (Н),
F r = ^V = 6,607 e- i 19 , 29 ° • 6,505 e- i 30 ,5 7 ° =
= 42,979 e - i 49,86 ° (Н),
V •г = b^Fi = 5 •Ю - 2 e^i 90 ° • 42,979 e- i 4 9,8 6 ° = = 2,149 e"i 139,86 ° (м • с - 1 ),
Vk2 = b2 F2 = 10 • 10 - 2 e 90 ° • 42,979 e- i 4 9,8 6 ° = k 2 k 2 2
= 4,298 ei 40,14 ° (м • с - 1 ),
Vr2 = g2 F, = 14,286 • 10 - 2 • 42,979 e - i 4 9,8 6 ° = = 6,14 e - i 4 9,8 6 ° (м • с - 1 ).
Расчет с применением дифференциальных уравнений занял бы несколько страниц.
Данным примера 5 соответствует векторная диаграмма на рис. 8.
Пример 6. Для параллельно-последовательного (двойного) резонанса. Отличие от примера 5 состоит в том, что k = 40 ( кг • с ~2).
z = Z = r = 7 el 0 ° ( кг • с -*),
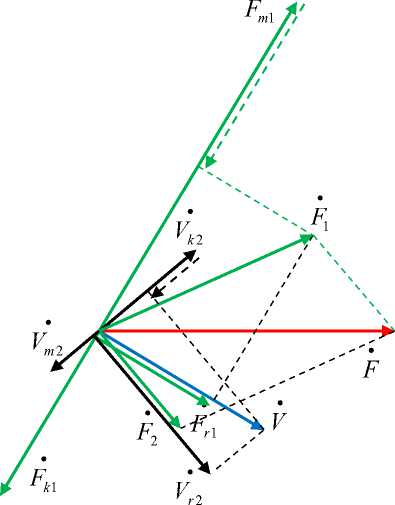
Рис. 8. Параллельно-последовательное соединение z = Z + Z = 2r = 14e0 (кг • с-1) ,
V = F/z = 100/(14 e 0 ° ) = 7,143 e 0 ° (м • с - 1 ), • •
F m 1 = x m 1 V = 20 e i 9^ 7,143 e i 0 ° =
= 142,857 e i 90 ° (Н),
F H= xj^ 20 e-i 90 ° • 7,143 ei 0 ° =
= 142,857 e - i 90 ° (Н),
F = F = rV = 7 e i 0 • 7,143 e i 0 ° = 50 e i 0 ° (Н),
F2 = z2V = 7e 0 ° • 7,143 e i 0 ° = 50 e i 0 ° (Н),
• •
V m 2 = b m 2 F 2 = 5 •Ю - 2 e - i 90 ° ^ 50 ei 0 ° =
= 2,5e-‘90° (м • с-1), v’ = b2F2= 5 •ю-2 e 90° • 50 e 0° = k2 k2 2
= 2,5 e i 90 ° (м • с - 1 ),
Vr2 = g2F2 = 14,286 • 10 - 2 • 50 e i 0 ° = = 7,143 e i 0 ° (м • с - 1 ).
Данным примера 6 соответствует векторная диаграмма на рис. 9.
•
Vk 2
•
F m1
•
F r 1 = F =F 2
•
Vm 2
^=F
• •
V r 2 = V
•
F
•
F k 1
Схема последовательнопараллельного соединения (рис. 10)
С учетом теоремы 1 y2 = 1/ z .
С учетом теоремы 3 y = y + y 2.
• •
С учетом (17) скорость штока V = yF .
Пример 7. Отличие от примера 5 состоит в том, что элементы соединены последовательно-параллельно.
y2 = 1/ z = 1/(12,207 e 55 ° ) =
= 8,192 - 10 -2 e’ i 55 ° ( кг -1 • с ),
У = y + y2 = 15,135 - 10 — 2 e 19,29 ° + + 8,192 - 10 — 2 e ’ i 55 ° = 19,061 - 10 - 2 e" i 5,126 ° ( кг - • с ),
V = F y = 100 • 19,061 - 10 — 2 e^i 5,126 ° = = 19,061 e- i 5,126 ° ( м • с -1),
-
V2 = F y 2 = 100 • 8,192 - 10 — 2 e^i 55 = = 8,192 e’ i 55 ° ( м • с -1),
-
- V + V 2 = 15,135 e‘ 19 ,2 9 ° + 8,192 e - i 55 ° = =19,061 e - i 5,1 26 ° (м • с - 1 ) = V .
Данным примера 7 соответствует векторная диаграмма на рис. 11.
Рис. 9 . Параллельно-последовательный (двойной) резонанс
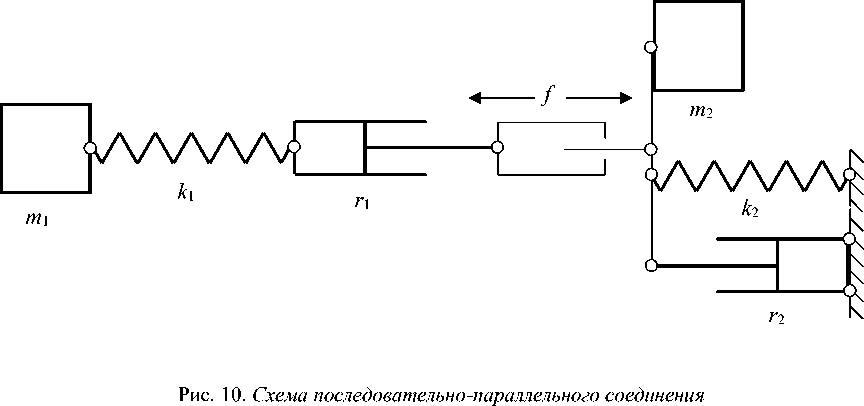
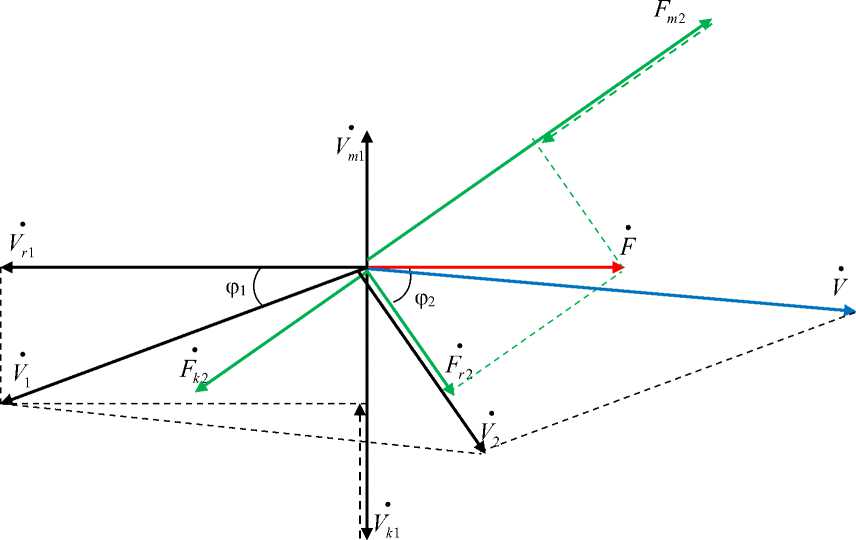
Рис. 11. Последовательно-параллельное соединение
Пример 8. Для последовательнопараллельного (двойного) резонанса отличие от примера 6 состоит в том, что элементы соединены последовательно-параллельно.
y 1 = V Z = g 1 = y 2 = V Z 2 = g 2 =
= V(12,207e'55) = 14,286 -10-2e'0° (кг-1 • с), y = У + y = 2 -14,286 -10—2e' 0° =
= 28,571 - 10 — 2 e ' 0 ° ( кг -1 - с ),
V = F y = 100 - 28,571 - 10 - 2 e ' 0 ° =
= 28,571 e ' 0 ° ( м - с ),
-
• • •
V = - V + V2,
-
- V =- F У 1 = V 2 = F y 2 =
= 100 - 14,286 - 10 - 2 e ' 0 ° = 14,286 e ' 0 ° ( м - с ),
• •
-
- V m 1 = b m 1 F = 5 - 10 - 2 e - ' 90 ° - 100 e ' 0 ° =
= 5 e -190 ° (м - с - 1 ),
-
— V L = ^F = 5 - 10 - 2 e ' 90 ° - 100 e ' 0 ° =
= 5 e ' 90 ° (м - с - 1 ),
-
- V =- gxF = 14,286 - 10 - 2 - 100 e ' 0 ° =
= 14,286 e ' 0 ° (м - с - 1 ),
Fml = Х^2 = 20 e' 90 ° - 14,286 e' 0 ° =
= 285,714e'90° (Н), f’ = х,Л= 20e-'90° -14,286e'0° = k2
= 285,714e-'90° (Н), • • ••
F =F =F = r V = r 2 2 r22
= 7 e ' 0 - 14,286 e ' 0 ° = 100 e ' 0 ° (Н).
Данным примера 8 соответствует векторная диаграмма на рис. 12.
Характер реактивности импеданса
•
Если F = Fe‘ 0 ,
i arctg m
Z = r + X m = rr + x m e r = ze ф,
то
•
V=- z
i 0
Fe— = —e -' ’ ze ' ’ z
Пример 9. При тех же количественных значений, что и выше,
x i arctg m
Z = rf + X m e r
= 4 72 + 20 2 e 7 « 21,19 e/ 70 ’ 71 ° ( кг - с ~‘),

z
100 ei 0
21,19 e ' 7 0, 71 °
4,719 e - ' 7 0, 71 °
( м - с ’) .
•
F m 2
•
V m 1
• •
V = V VV 1
• •
F = F r 2
V 2
V
•
Vk 1
Данным примера 9 соответствует векторная диаграмма на рис. 13.
Пусть теперь iarctg k
Z = r + X k = rr 2 + x 2 e r = ze i Ф •

Рис. 13. "Инертный" импеданс
Пример 10. При тех же количественных значениях, что и выше, x iarctg k z = rr + Xk e r =
- 10
= 77 27 10 2 e 7 * 12,207 e -‘55 ° ( кг ■ с ~‘),

z
100 ei 0
12,207 e ~‘ 55‘
* 8,192 e ‘ 55‘
( м ■ с ’).
Данным примера 10 соответствует векторная диаграмма на рис. 14.
Рис. 14. "Упругий" импеданс
Из примеров 9 и 10 вытекает доказанная этими примерами
Теорема 5. Если сила опережает скорость по фазе, то нагрузка инертная, если отстает, то – упругая. Если фазы силы и скорости совпадают, то – резистивная (активная).
Замечание. При x = х + x и x < x импеданс " упругий " . При х > x импеданс " инертный " .
Теорема 6. Если х ^ x, то реактивный характер импеданса изменяется на противоположный при замене схемы соединения элементов (с последовательного на параллельное или наоборот).
Доказательство. Если х > x и соеди- нение параллельное, то x = xr
+ xk =
m ю —
k \ ‘ i
— I e a)
С учетом замечания к теореме 5 импеданс является " инертным " , при этом фаза ‘ п/2 > 0 .
Если эти же элементы соединить после- довательно, то
I ю
b = b + b = k I k
—
1 ‘ п
— I e 2 ю m )
a m — k /ю ‘ п e 2
km
С учетом следствия из теоремы 1
1 km — ‘ П
=e 2 b ю m — k /ю
Фаза поменяла знак (— i п/ 2 < 0 ).
Другими словами, импеданс стал " упругим " .
Очевидно, что при х < x дело обстоит точно так же.
Теорема доказана.
Заключение
Использование символического (комплексного) описания механических систем -при вынужденных гармонических колебаниях (в установившемся режиме) позволило отказаться от чрезвычайно громоздкого и трудоемкого алгоритма расчета, связанного с решением дифференциальных уравнений и заменить его простыми и наглядными алгебраическими операциями. Благодаря этому время расчетов уменьшается в разы.
Для рассмотренных разветвленных механических схем классические методы, основанные на решении дифференциальных уравнений второго порядка, многократно усложняются и требуют решения систем уравнений, которые сводятся к дифференциальным уравнениям более высоких порядков.
Использование символического (комплексного) описания механических процессов и систем позволяет применять вместо этого простые и компактные алгебраические методы, трудоемкость которых меньше в десятки раз.
Векторные диаграммы, не являясь необходимой составляющей исследования механических систем, имеют существенное методическое значение, поскольку показывают количественные и фазные соотношения между параметрами систем.
Список литературы Комплексные представления для расчета механических систем при гармонических процессах
- Popov I.P. Free harmonic oscillations in systems with homogeneous elements // Journal of Applied Mathematics and Mechanics. 2012. Vol. 76. Iss. 4. P. 393-395. DOI: 10.1016/j.jappmathmech.2012.09.005
- Попов И.П. Дифференциальные уравнения двух механических резонансов // Прикладная физика и математика. 2019. № 2. С. 37-40. DOI: 10.25791/pfim.02.2019.599
- Повышение энергоэффективности приводов решетных сортировальных вибромашин / И.П. Попов, С.С. Родионов, В.И. Мошкин. Курган: Изд-во Курганского государственного университета, 2019. 154 с. 978-5-4217-0519-2. ISBN: 978-5-4217-0519-2
- Попов И.П. Мультиинертный осциллятор // Вестник Пермского университета. Математика. Механика. Информатика. 2020. № 1(48). С. 60-64. DOI: 10.17072/1993-05502020-1-60-64
- Попов И.П. Моделирование биинертного осциллятора // Приложение математики в экономических и технических исследованиях: сб. науч. тр. / под общ. ред. В.С. Мхитаряна. Магнитогорск: Изд-во Магнитогорск. гос. техн. ун-та им. Г.И. Носова, 2017. С.188-192.
- Попов И.П. Инертная колебательная система из двух грузов для вибрационных механизмов // Вестник Вологодского государственного университета. 2020. №2(8). С. 10-12.
- Попов И.П. Инертные реактансы вибрационных машин // Вестник Магнитогорского государственного технического университета им. Г.И. Носова. 2019. Т. 17, № 4. С.52-55. DOI: 10.18503/1995-2732-2019-17-4-52-55
- Попов И.П. Механические аналоги реактивной мощности // Вестник Пермского университета. Математика. Механика. Информатика. 2015. № 3(30). С. 37-39.
- Попов И.П. Условно-ортогональные механические мощности // Оборонный комплекс - научно-техническому прогрессу России. 2019. № 4(144). С. 15-17.
- Попов И.П. Резонансы сил и скоростей // Вестник Пермского университета. Математика. Механика. Информатика. 2019. №4(47). С. 62-66. DOI: 10.17072/19930550-2019-4-62-66
