Коррекция полета тяжелой материальной точки в среде с сопротивлением при наличии геометрических ограничений на дополнительные управления

Автор: Лутманов С.В., Хотько О.А.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 3 (46), 2019 года.
Бесплатный доступ
Данная работа является продолжением цикла статей [5-7], посвященных коррекции возмущенного полета управляемой тяжелой материальной точки с целью выхода ее на базовый закон движения. Возмущение полета вызвано неточным соблюдением начальных условий, а коррекция движения производится дополнительными управлениями, входящими в дифференциальные уравнения движения аддитивно базовым управлениям. В отличие от работ [5-6] здесь считается, что на параметры дополнительного управления наложены геометрические ограничения в форме включения в некоторое выпуклое компактное множество. Показано, что если геометрические ограничения не слишком обременительны, то коррекция движения может быть успешно осуществлена.
Базовое движение, возмущенное движение, программное управление, коррекция полета, критерий качества
Короткий адрес: https://sciup.org/147245453
IDR: 147245453 | УДК: 519.7 | DOI: 10.17072/1993-0550-2019-3-56-64
Correction of flight of a heavy material point in an environment with resistance in the presence of geometric constraints on additional controls
This work is a continuation of a series of articles, devoted to the correction of a perturbed flight of a controlled heavy material point in order to reach its basic law of motion. Flight perturbation is caused not by exact observance of the initial conditions, and movement correction is performed by additional controls included in the differential equations of motion additively to basic controls. considered here that geometric constraints are imposed on the parameters of the additional control in the form of inclusion in a convex compact set. It is shown that if the geometric constraints are not too burdensome, then the movement correction can be successfully implemented.
Текст научной статьи Коррекция полета тяжелой материальной точки в среде с сопротивлением при наличии геометрических ограничений на дополнительные управления
1. Уравнения движения управляемой точки и требования к кинематике полета
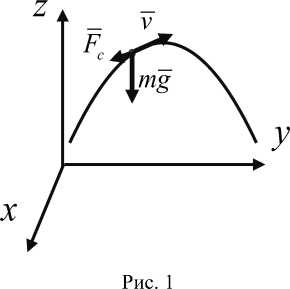
В работе [5] были выведены дифференциальные уравнения управляемого полета тяжелой материальной точки в однородном поле тяжести в среде с сопротивлением, пропорциональным квадрату скорости (см. рис. 1).
Эти уравнения имеют вид mx = - k (x2 + y2 + z1 )*
x
^^= + V , 1
my = - k ( x 2 + y 2 + z 2 ) *
y
* / + V2, x + y + z mz = - k (x2 + y2 + z2 )*
*
- mg + V 3 ,
или
k 2 2 2 1
x =—x * у x + y + z +— v1, mm
k 2 22
y =--y ’ \x + y + z + mm k 222
z =—z• vx + y + z -g+ mm
(1.1)
где z — вертикальная, x , у — горизонтальные, координаты точки, m — ее масса, g — ускорение силы тяжести, k = const — коэффици-
ент пропорциональности, а
V 1
v 2
v
— вектор
управляющих параметров. К кинематике полета предъявляются следующие требования. Движение начинается в момент времени t и заканчивается в момент времени T > t^ на поверхности земли в положении, близком к точке ( xT , yT, zT ) . При этом полет должен происходить на высоте не менее 8 > 0 (за исключением заключительной фазы полета) и не более 2 8 > 0 от поверхности земли. Начальное положение и начальные скорости точки заранее не определены. Про них лишь известно, что они удовлетворяют условиям
Х0 ~ 0, У0 ~ 0, z0 е[^(Х0,У0 ) + 8,^(ХгУ0 ) + 28] , xyz
Хо ~ — , Уо ~ — , Zo ~ —
0 ^0
1 t 0 t 10 t1
где p : R 2 ^ R 1 - гладкая функция двух переменных, моделирующая рельеф местности.
Х = Х ( t ) , у = у ( t ) , z = Z ( t ) t е [ 1 0 , T ] . будем называть базовым законом движения, если
Х ( t 0 ) = 0, У ( t 0 ) = 0,
Z ( t 0 ) е[Н Х 0 , У 0 ) + 8 , ^ ( Х 0 , У 0 ) + 2 8 ] ,
Х ( t 0 ) = . У ( t 0 ) = ' .
T t 0 T t 0
и он удовлетворяет всем требованиям, предъявляемым к кинематике полета.
Приведем один способ построения базового закона движения точки. Полагаем
Х = 0, У 0 = 0, Х = \ Х ,У 0 = ' ^ ,
T t 0 T t 0
Х ( t ) = Х 0 + Х 0 ( t — t 0 ) ,
У ( t ) = У 0 + У 0 ( t — t 0 ) , t е [ t 0 , T ] •
Пусть tx g( t0, T ) и s — натуральное число.
Разобьем промежуток времени [ t 0, T ] точками
T 0 = t 0 , T 1 = T 0 + ^", T s = T s — 1 + Д = T ,
Точные
значения
x o , У 0 , z 0 , x 0 , y 0 , z 0
начальных условий становятся известными
Д =
±t 0
s
только в момент старта. Управление движением точки будем осуществлять в классе программных стратегий.
Определение 1. Произвольная интегрируемая вектор-функция v : [ t 0, T ] ^ R3, называется программным управлением точкой на промежутке времени [ 1 0 , T ] .
В статье решается следующая задача управления полетом точки.
Задача. Построить программное управление v 0: [ t 0, T ] ^ R3 материальной точкой, которое обеспечивало бы выполнение требований, предъявляемых к кинематике полета.
2. Базовый кинематический закон движения точки и базовое программное управление
Не теряя общности, считаем, что для некоторого номера sc < s выполняется равенство т = t . В противном случае разбиение про- s c 1
межутка времени [ t0, T ] можно сделать ча стично неравномерным.
Далее нарабатывается массив точек
( Т 0 , Z 0 ) , ( т , Z 1 ) ^’^ ( T s , Z s ) ,
где
Z 0 e[ H Х ( т 0 ) , У ( т 0 ) ) + 8 ,
Н Х (т0 ),У (т0)) + 28 ],
Z 1 е[ р ( Х ( т ) , У ( т 1 ) ) + 8 , ^ ( Х ( т 1 ) , У ( т 1 ) ) + 2 8 ] ,
Введем понятие базового закона движения точки.
Определение 2. Кинематический закон движения точки
Z sc еИ Х ^с ) ’ У К )) + 8’
^(Х (Tsc ) ’ У (.У )) + 28 ’
zsc + 1
€
T - Tn
^ ( x ( T s c + i ) , y ( T s c + i ) ) + * • T-y- sc
T :
^(x (TSc +1 ) , y (TSc +1 )) + 2£ • sc
+ * • T ,
T : T s c
Z s - 1 e ^ ( x ( T s - 1 ) , y ( T s - 1 ) )
^( x (Ts-1 ) , y (Ts-1 )) + 2* • T^^ , T - TSc J zs = ZT .
Функциональная зависимость
Z ( t ) = f ( t ) , t € [ t 0 , T ]
устанавливается путем интерполяции массива точек. В результате получим n f (t ) = ! ait.
i = 0
Выбирая число промежутков s достаточно большим, а степень интерполяционного полинома достаточно высокой, можно добиться того, что кинематический закон движения точки x = -X (t), y = y (t), z = Z (t), t e[to, T] (2.2)
будет базовым.
Определение 3. Программное управление v = v(t), t e[to,T], реализующее базовый закон движения точки, назовем базовым программным управлением.
Для построения базового программного управления уравнения (1.1) разрешаем относительно управлений:
v = mx + kx • ^x1 + y2 + Z2, v2 = my + ky • ^x2 + y2 + Z2, (2.2)
v 3 = mZ + kZ • x 2 + y 2 + Z 2 + mg .
Базовый закон движения (2.1) подставим в уравнения (2.2). В результате получаем искомые базовые управления
vt (t) = mx (t) +
+kx (t) • 7x2 (t)+y2 (t)+z 2 (t),V2 ( t ) = my ( t ) ++ky (t) • 7x 2 (t) + y 2 (t) + Z 2 (t),
V3 (t) = mZ (t) +
+ kZ ( t ) • x 2 ( t ) + y 2 ( t ) + Z 2 ( t ) + mg .
-
3. Возмущенные начальные условия и возмущенные движения
Пусть
|
7 X x voz 0 y voz 0 |
= |
Z - \ x 0 y ˆ 0 |
+ |
[ S x 0 1 ^ y 0 |
, |
[ S x 0 1 S y 0 |
* 0, |
||
|
V z voz 0 7 |
V z 0 7 |
V s z 0 7 |
V s z 0 7 |
||||||
|
x voz 0 |
x ( t 0 ) |
11 |
r S x 0 |
1 |
r S x 0 |
1 |
|||
|
• y voz 0 |
= |
= y ( t 0 ) |
) + S y 0 |
’ |
S y 0 |
* 0 |
|||
|
z voz 0 7 |
V' |
z ( t 0 ) |
• 7 |
V s z 0 7 |
3z V S Z 0 7 |
||||
где величины
r Sx0
S y 0
V u o 7
^ ^x o S y 0 Sz
V uz 0 7
малы .
Определение 4. Вектора vo 0
y
V Z voZ 0 7
(x A xvoz 0
y o 0
V Zvoz 0 7
назовем возмущенными начальными условия- ми, а вектора
Г S x 0 Л
S y0
V S z 0 7
* 0,
r S x 0
S y 0 * 0 - возму-
V S Z 0 7
щением начальных условий точки.
Обозначим x = xvoz (t ) , y = yvo. (t ) , Z = ZVOZ (t ) , t e[10,T] (3.1)
– решение системы дифференциальных уравнений k 2 2 21
x =--x • yx + y + Z +— Vj (t), mm
y = - Zy • 7 x2+y2+z2 +—v2 (t), mm
z = - —= • 7 x2+y2+z2 - g+7 V3 (t), mm с начальными условиями x (t0 ) = xvoz 0 , y ( t0 ) = yvoz 0, Z ( t0 ) = zvoz 0 , x (t0 ) = xvoz 0 , y ( t0 ) = yvoz 0 , Z ( t0 ) = zvoz 0 .
Определение 5. Кинематический закон движения точки (3.1) назовем возмущенным движением, а разность
|
r t x ( t )Л |
Г x voz ( t ) ' |
Г x ( t )! |
||
|
t y ( t ) |
= |
У voz ( t ) |
y ( t ) , |
|
|
l t z ( ' ) , |
l z voz ( t |
i z ( t J |
||
|
г t x ( t )4 |
Г x voz ( t )' |
' x ( t )1 |
||
|
t y ( t ) |
= |
У voz ( t ) |
— |
y ( t ) . |
|
i t z ( t ) > |
z ˆ t l voz у у) |
z ( t ) l) |
t ^ [ t 0 , T ]
возмущением движения точки.
4. Минимизация возмущений
Основная идея решения задачи управления точкой, сформулированной в первом пункте, состоит в построении управления, вынуждающего точку двигаться по кинематическому закону, который, начиная с момента времени t1 g [ t 0, T ] , мало отличается от базо
вого закона движения. Для этого требуется обнулить возмущения в момент времени t i< t о , T ] .
Обнуление возмущений будем осу-
ществлять при помощи дополнительного
управления
u (•)=
г u m u2 (0 lu3 0j
которое вводится в дифференциальные уравнения (1.1) аддитивно основному управле-
|
Г 0 |
0 |
0 |
1 |
0 |
0 ^ |
|||
|
0 |
0 |
0 |
0 |
1 |
0 |
|||
|
0 |
0 |
0 |
0 |
0 |
1 |
|||
|
a 0 |
a 0 |
0 |
d F |
d F |
В |
|||
|
A ( t ) = |
d x |
3 y |
a z |
|||||
|
0 |
0 |
A 0 |
d F |
d F2 |
d F |
|||
|
d x |
d y |
d z |
||||||
|
0 l |
0 |
0 |
d F d x |
. d F 3 d y |
. d F 3 d z ) |
x = x ( t ) , y = y' ( t ) z = z ( t ) , v i = v i ( t ) , i = 1,2,3 |
||
|
Г 0 |
0 |
0 Л |
Г q 1' |
|||||
|
0 |
0 |
0 |
q 2 |
|||||
|
B ( t ) = |
0 1 m |
0 0 |
0 0 |
, q = |
q 3 q 4 |
G j |
6 , |
|
|
0 |
1 m |
0 |
q 5 |
|||||
|
l 0 |
0 |
1 m ) k --. m |
l q 6 > |
|||||
|
F 1 ( x . y . z . v 1 |
) = |
x • yjx2 |
• 2 -2 + y + z + |
|||||
|
1 +- v 1 . m |
k — m |
|||||||
|
F 2 ( x . y . Z . v 2 |
) = |
y • ylx 2 + y |
2 + |
z 2 + |
||||
|
1 + — v 2 , m |
k — m |
|||||||
|
F 3 ( x, y, z, v 3 |
) = |
z • V x2 |
• 2 -2 + y + z — |
|||||
|
— g + |
1 v m |
3 . |
||||||
нию, т. е.
x = —— x • x2 + y2 + z2 + —(v (t) + u ), mm
y = - — y • 7x2 + y2 + z2 + — ( v2 (t) + u 2), mm
z = — — z • Jx2 + y2 + z2 - g + — (v3 (t) + u3). mm
Динамика управления возмущениями приближенно описывается векторным линейным дифференциальным уравнением [5]:
x = A ( t ) q + B ( t ) u , (4.1)
где
При отсутствии геометрических ограничений на дополнительное управление для начального возмущения
При этом разрешающее управление в работе [5] было оптимально по критерию "минимум энергии", а в работе [6] – по критерию "минимум силы". Терминология взята из монографии [1].
В данной статье принимается, что u g P , где P о R 3 — выпуклое компактное множество. Символом Пр [ t 0, t j ] обозначим множество всех программных управлений на промежутке времени [ t 0, t{ ] , для которых выполнено включение u ( t ) g P , t g [ t 0, tx ] . В силу геометрических ограничений на управление u ( • ) задача обнуления фазового вектора системы (4.1) в момент времени ( g [ t 0, T ] может и не иметь решения. Вместо нее здесь решается задача минимизации расстояния от фазового вектора в момент времени t до
Теорема 2. Пусть s ( t 0 , q 0 ) > 0 и u 0 ( • ) g Пр [ t 0, tx ] — программное управление, для которого выполнено условие
||q ( t i , t 0 , q 0 , u ( •) )|| = s ( t 0 , q 0 ) > 0 .
Тогда
HH [ t ] u ° ( t ) , l °^ = min H l [ t ] u , l °^, t g[ t 0 , t i ] .
Изложим алгоритм построения программного управления u 0 ( • ) g П^ [ t 0, tx ] , решающего задачу минимизации расстояния от фазового вектора линейного объекта до начала координат в случае, когда s ° ( t 0, q 0) > 0 и
|u | < a , | u 2| < a 2, | u 3| < a3 > .
начала координат.
Указанное минимальное расстояние s 0 ( t 0, q 0) вычисляется по формуле [2]
1. Вычисляется величина
s ( t о , q 0 ) = max { 0, max [( Q [ t i , t о ] * o , 0 ] ,
t 1
+| min H [t] u, tydt t0
\ , (4.2)
(H [ t ] u , l) =

' h i ( t ) h i ( t )
4 h 6i ( t )
hi2 ( t )
hi2 ( t )
h 62 ( t )
h i3 ( t ) 1
h3 (t)
^ u i Л
u v u 3 >
h63 ( t ) ;
где Q [ t, t ], t , t g[ tQ, tx ] — фундаментальная матрица Коши для однородного уравнения q = A (t) q , а H [ t ] = Q [ ti, t ] B (t), t ,t g[ to, ti ] — матрица перехода для линейного объекта (4.1). Заметим, что если S (t0, q0) > 0 , то обнулить возмущения в момент времени t нельзя в принципе.
Алгоритм решения задачи минимизации основывается на следующих двух утверждениях [1–2].
Теорема 1 . Пусть S ( t 0, q 0 ) > 0 .
Тогда максимум в (4.2) существует и достигается на единственном векторе l0 g R 6,|| l 0|| = 1 .
Символом q ( • , 1 0, q 0, u ( • ) ) обозначим движение линейного объекта (4.1), выходящее из начального положения ( t 0, q 0) и порожденное управлением u ( • ) g Пр [ t 0, tx ] .
(Л
X Mt) uj j=i
,
E M t )( t ) u , V l ■ У
Ij=i
(^ =E E j t) uj li = i=i V J =i
= E|Eh,(t)li uj =XJt,l)uj, j =i V i=i У где
^ j ( t , l ) = E j t ) l i , j = i,2,3.
i = i
2. Решается задача математического программирования
4. Строится оптимальное управление
<
( H [ т ] u . 0 = Z a ( t , l )
j = 1
u 0
u e P.
' U 1 0 ( t , l 0 f
(t ) = U0 (t, l0 )= U20 (t, l0) , кU 0 (',10), t e [t0, t1 ]
(4.3)
Пусть U 0 ( t , l ) = U 0 ( t , l ) - решение
U 0
ется
этой задачи. Тогда
5. Производится проверка. Интегриру-дифференциальное уравнение
dq (t ) = A (t) q (t) + B (t) u0 (t), t e[ t 0, t1 ]
- a
U j ( t , l ) = j ve[- a j , a j. ] ,
a j,
a j ( t , l ) = 0, ^ ( t , l ) < 0.
с начальными условиями q ( t 0 ) = q 0. Обозначим q 0 ( • ) = q ( • , t 0, q 0, u 0 ( • )) . Должно выпол-
няться
- a j • sign [ o j ( t, l ) ] ,
j = 1,2,3 .
e ( t 0 , « 0 h p ( q 0 ( t ) , { 0 })=| q ° ( t ,)| .
4. Вычисляется величина
j = 1
5. Решение основной задачи управления
Полагаем
—
j = 1
3. Решается задача математического программирования
t 1
<
t 0
t 1 3
( Q [ t 1 , t 0 ] q 0 , l ) - |Z a j |a j ( т , l ) I d
1 0 j = 1
Z lf = 1.
i = 1
l 1
f v1 (' )1 V (t) кV(t )J f к t)+u0 (t )1 V2 ( t ) + u0 ( t ) кv (t) + u0 (t)? f v (t n ' ( t ) , кv3 (t);
t e [ t 0 , t 1 ]
t e ( < 1 - T ]
(5.1)
Пусть l 0 =
l i 0
1 0 к 1 6
Заметим, что e0 (t.,
- ее решение.
+J H [т] U0 (т, l"), l0 T = t0
t 1 3
т .
t 0 j 1
Обозначим xkor ( t ) , У—ог ( t ) , zkor ( t ) , t e[ t0, T ]- решение системы дифференциальных уравнений x = - — x • x2 + y2 + z2 + — v 0 (t), mm y = -—y • 7 x2+y2+z2 +—V0 (t ), mm z = -—z • 7x2 + y2 + z2 - g + — V0 (t), mm с начальными условиями x (t0 ) = xvoz 0 , y ( t0 ) = yvoz 0 , z ( t0 ) = zvoz 0 , x (t0 ) = xvoz 0 , y ( t0 ) = yvoz 0 , z ( t0 ) = zvoz 0 •
Определение 6. Закон движения xkor (•) , Уког (•) , zkor (•) называется откоррек- тированным законом движения точки.
Откорректированный закон движения динамического объекта приближается к базо- вому закону движения в момент времени tx g[t0, T] на расстояние г° (t0, q0). В случае, когда эта величина мала, дальнейший полет точки будет происходить в малой окрестности базового закона движения. Таким образом, требования к кинематике полета будут вы-
Г V 0 ^ v 0 ( • )
I v 0 C) J
полнены, и управление
будет решени-
ем задачи, поставленной в пункте 1.
6. Численный эксперимент
Изложенная выше теория иллюстрируется на следующих числовых данных:
k = 0.45, m = 100 кг , g = 9.8 м , г = 30 м , сек 2
t 0 = 0, T = 10 сек , p ( x , y ) =50 • sin ( 0.00005 • x • y ) м , x 0 = - 40 м , y 0 = 20 м , z 0 = 40 м , , xT = 3000 м , yT = 100 м , zT = ф ( xT , yT ) = 32.51 м , мм м
X0 310 ,y0 10 , z0 —12.75 , cек cек cек s = 100, t* = 5 сек ^ sc = 50, n = 15, a = 2050 н, a2 = 2050 н, a3 = 2050 н .
Здесь г0 (t0,p0 ) = 0.38 м > 0 и, следовательно, задача обнуления возмущений не разрешима. Этот факт подтверждается и путем вычисления величин u^=maxu0^ t), t G[ t 0, t1 J u0 . = max u0 -tt )|, i = 1,2,3, сил1 t g[ 10, t1 J сил где u0 (•), uL (•)- оптимальные управления, решающие задачу обнуления возмущений, полученные в работах [5], [6] соответственно. Имеют место неравенства u э. = 2293,7 н > 2050 н, энер uc^ = 2172,1 н > 2050 н (i = 1, j = 1), которые означают нарушение геометрических ограничений u g P для управлений uU (•),ul (•).
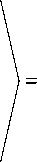
На рис. 2–4 приведены покомпонентные графики управления u 0 ( • ) , вычисленного по формулам (4.3). На них мелким пунктиром нарисован график компоненты управления, а крупным – граница области ее изменения.
Рис. 2. Первая компонента управления
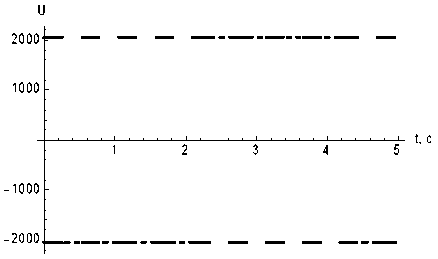
Рис. 3. Вторая компонента управления
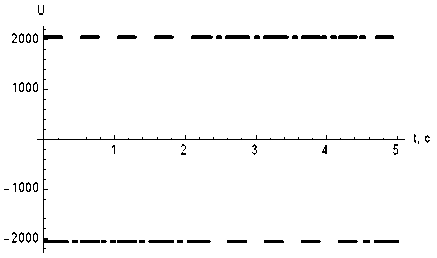
Рис. 4. Третья компонента управления
Таким образом, управление u 0 ( • ) удовлетворяет включению u 0 ( t ) g P , t g [ t0 , tx J и представляет собой кусочно-постоянную функцию, принимающую значения на границе своей области изменения. Непосредственно убеждаемся, что
II p ( t 1 , t 0 , p 0 , u 0 ( • ))] = 0.4 м ~
« 0.38 м = г 0 ( 1 0, p 0 ) .
Следовательно, управление и 0( • ) действительно решает задачу минимизации расстояния от фазового вектора линейного объекта в момент времени t = 5 сек до начала координат. Величина s 0 ( t0 , p 0 ) = 0.38м мала по отношению к величине дальности полета, поэтому управление, решающее задачу для исходного нелинейного объекта, можно построить по формуле (5.1).
На рис 5. приведены совместные графики координаты z = zkor ( t ) , t e [ t o , T ] точки в движении по откорректированной траектории (тонкая линия) и рельефа местности z = ^ ( x kor ( t ) , Укок ( t ) ) , t e[ t 0 , T ] (жирная линия).
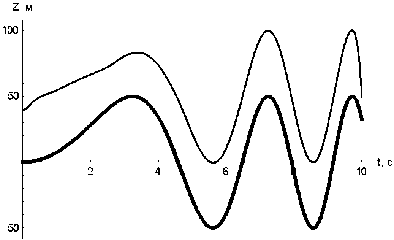
Рис. 5
Из рисунка видно, что для откорректированного движения фазовые ограничения на полет точки выполнены. Заметим, что промах по цели в конечный момент времени для откорректированной траектории составляет величину 2.02 м .
На рис. 6 показаны трехмерные траектории точки в базовом (штриховая линяя) полете и откорректированном (сплошная линия) полете.
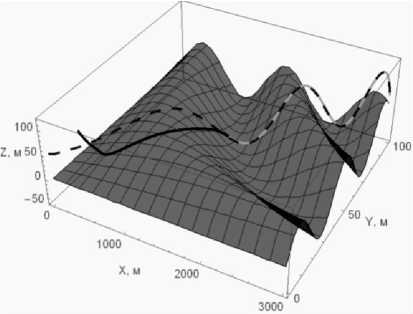
Рис 6
Из рисунка видно, что в момент времени t = 5 сек откорректированное движение почти выходит на базовое движение и в дальнейшем с ним практически совпадает.
Заключение
-
1. В статье ставится и решается задача управления полетом тяжелой материальной точки в среде с сопротивлением, пропорциональным квадрату скорости в условиях неполной информации об ее начальном положении. Эта информация становится полной только в момент старта.
-
2. Решение поставленной задачи осуществлено путем сближения возмущенного движения точки с базовым законом ее полета.
-
3. Указанное сближение реализовано в условиях геометрических ограничений на дополнительные управления.
-
4. В численном эксперименте показана эффективность применяемых алгоритмов управления.
Список литературы Коррекция полета тяжелой материальной точки в среде с сопротивлением при наличии геометрических ограничений на дополнительные управления
- Красовский Н Н. Теория управления движением. М.: Наука, 1968. 476 с.
- Лутманов С.В. Вариационное исчисление и теория оптимального управления в примерах и упражнениях: учеб. пособие, Перм. ун-т. Пермь, 2010. 200 с.
- Лутманов С.В. Об одной методике исследования управляемой динамической системы // Вестник Пермского университета. Математика. Механика. Информатика. 2017. Вып. 1 (36). С. 13-20.
- Лутманов С.В., Кучкова Т.Ю., Овчинников В.А. Управление динамической системой, линеаризованной в окрестности базового движения, в условиях геометрических ограничений на вектор дополнительных управляющих параметров // Проблемы механики и управления: межвуз. сб. науч. тр. Пермь, 2018. Вып. 50. С. 12-32.
- Лутманов С.В. Хотько О.А. Об одной задаче управления тяжелой точкой, движущейся в среде с сопротивлением, пропорциональным квадрату скорости // Вестник Пермского университета. Математика. Механика. Информатика. 2018. Вып. 3 (42). С. 69-75.
- Лутманов С.В. Хотько О.А. Оптимальная коррекция полета тяжелой материальной точки в среде с сопротивлением, пропорциональным квадрату скорости // Проблемы механики и управления: межвуз. сб. науч. тр. Пермь, 2018. Вып. 50. С. 33-45.
- Лутманов С.В. Коррекция движения управляемого динамического объекта в условиях воздействия на него неконтролируемой помехи // Вестник Пермского университета. Математика. Механика. Информатика. 2019. Вып. 1(44). С. 14-21.
