Линейные параметрические стохастические системы нейтрального типа с кратными запаздываниями

Автор: Полосков Игорь Егорович
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 1 (9), 2012 года.
Бесплатный доступ
Рассматриваются проблемы, связанные с расчетом первых моментов фазового вектора линейной стохастической динамической системы нейтрального типа с кратными постоянными запаздываниями. Система возмущается аддитивными и мультипликативными случайными шумами. На основе комбинации схемы расширения фазового пространства и метода шагов строится цепочка стохастических дифференциальных уравнений без запаздывания, а затем и уравнения для искомых моментов. Приведены примеры анализа переходных режимов. Расчеты осуществлялись с помощью программы на входном языке пакета Mathematica.
Моделирование, стохастический анализ, запаздывание, фазовое пространство, линейная динамическая система, фазовый вектор, расширение, метод
Короткий адрес: https://sciup.org/14729773
IDR: 14729773 | УДК: 5
Linear parametric stochastic neutral differential systems with multiple delays
Problems of computation of t h e first moment functions for the phase vector of linear stochastic neutral delay differential system are considered in the paper. The system is excited by additive and multiplicative random noises. A combination of t h e phase space extension technique and the method of steps is used to derive a chain of stochastic differential equations without delay and equations for required moment functions too. Some examples of analysis of transition processes are demonstrated. Calculations were produced by a computer algebra package Mathematica-code program.
Текст научной статьи Линейные параметрические стохастические системы нейтрального типа с кратными запаздываниями
Как известно, в последние годы значительный интерес вызывают проблемы, связанные с анализом явлений, которые описываются функционально-дифференциальными уравнениями (ФДУ) и их частными формами, такими как ДУ с запаздыванием, ДУ нейтрального типа, иптегро-дифферепциальпые уравнения и др. [1-4]. Свидетельством этого служит постоянно увеличивающийся поток публикаций по данной тематике.
В настоящее время существует только несколько областей исследования ФДУ, где ведутся интенсивные научных разработки. Среди них качественный анализ существования и устойчивости решений ФДУ; прямое количественное исследование линейных систем, в первую очередь, па основе применения классического метода шагов; использование процедур усреднения ДУ с учетом малости запаздывания; различные чис-
Работа выполнена при финансовой поддержке Российского фонда фундаментальных исследований (проект № 11-01-96024).
лепные интеграторы и другие методики для получения частных решений задач [4-6] и т.д.
В процессе развития методов анализа указанных систем, ставших уже классическими, возник интерес к стохастическим ФДУ разных типов [1,4,7-9]. Но исследование таких систем вызывает значительные трудности.
Наша схема анализа некоторых классов систем стохастических дифференциальных уравнений (СДУ) с запаздыванием [10-13] базируется па комбинации метода шагов и расширении фазового пространства (МШРФП) и позволяет строить процедуры исследования различных форм ФДУ с одной точки зрения. При этом в большинстве вариантов схемы ошибка метода отсутствует. Кроме того, исчезают многие проблемы, возникающие при реализации процедур прямого численного интегрирования ДУ с запаздыванием. В данной работе мы представляем детали этой схемы для анализа систем линейных неавтономных СДУ нейтрального типа с кратными постоянными запаздываниями, которые возмущаются аддитивными и мультипликативными случайными шумами. Применение этой схемы демонстрируется па примерах. Инструментом расчетов являлся пакет компьютерной алгебры (ПКА) Mathematica [14].
1. Постановка задачи и метод исследования
Рассмотрим последовательность систем линейных параметрических СДУ Стратоновича [15] нейтрального типа с кратными постоянными запаздываниями следующего вида ( r = О, 1, ..., v, при r = 0 без запаздывания):
r
X ( t ) = P r ( t ) + £ Pr,r- ( t ) X ( t - (t ) +
£ =1
+ £ Qr,r-£ ( t ) X ( t - (t ) + £ =0
+ [ Ur ( t ) + £ Vr,r-£ ( t ) : X (t - (t )] o W ( t ) , £ =0
t>tr = 1 0 + r ■ T ; X ( t o) = X *, (1)
где t ф 1 0 - время; t = const > 0: X ( t ) = {Xi ( t ) }. i = 1.2 n. - фазовьin вектор; X * = {X*}. i = 1, 2, ..., n, - случайный вектор с известными характеристиками; W ( t ) = {Wj ( t ) }, j = 1, 2, ..., m, - вектор независимых случайных функций типа белого шума с единичными иитеисивиостями:
M [ W ( t )]=0 , (2)
M [ W ( 1 1) V W T( 1 2)] = E ■ 6 ( 1 1 - 1 2)
(W ( t ) - вектор независимых стандартных винеровских процессов); p r ( t ) = {pri ( t ) }, Pr£ ( t ) = {Pr£ij ( t ) }- Qr£ ( t ) = {qr£ij ( t ) }. Ur ( t ) = {unk ( t ) }. Vr£ ( t ) = {vr£ijk ( t ) } - неслучайные векторы и матрицы; i. j = 1. 2 n: k = 1. 2 m: T 11 M - символы траиспоиироваиия и математического ожидания соответственно; E - единичная матрица;
S : Y = {£ Sijk Yj } ’ i = 1n k = l ^m-j =1
Пусть в момент времени 1 0 заданы значения элементов вектора математических ожидании m * = M [ X * ] и матрицы дисперсий
D* = M [{ X * - m * }{ X * - т * }т] .
Задачей исследования является построение системы обыкновенных дифференциальных уравнений (ОДУ) для компонентов вектора средних т ( t ) = M [ X ( t )] 11 матрицьi дисперсий D ( t ) = M[{ X ( t ) - m ( t )}{ X ( t ) - m ( t )} T ] сказового вектора X ( t ) при лтобом t ф 10.
Как и в ряде предыдущих наших работ, для того чтобы получить СДУ без запаздывания, применим метод расширения фазового пространства. Для этого введем следующие обозначения ( q = 0 , 1 , 2 ,...):
X q ( S )= X ( Sq ) , W q ( S ) = W ( Sq ) , A q = ( tq- 1 ,tq ] , Z 0 = X 0 , S 0 = W 0 , (3)
Z 1 = col( X 0 , X 1) , Z 2 = col( X 0 , X 1 , X 2) ,..., S 1 = col( W 0 , W 1) , S 2 = col( W 0 , W 1 , W 1) ,..., W q (0)= W q— 1( T ) , Y q ^ X q (0) = X q- 1 ( T ) , col( X 0 ,---, X N - 1 , X N ) = {X 01 ,X 02 ,...,X 0 n, ...,XN 1 ,X n 2 ,...,XNn}T-
Рассмотрим последовательность полуинтервалов (сегментов) A q.
0°. На сегменте A0 систему СДУ Стратоновича, решением которой является случайная векторная функция Z 0( s ) = X 0( s ), можно записать в следующем виде (здесь и далее точкой обозначена производная по переменной s):
X 0( s ) = P 0( s 0) + Q 00( s 0) X 0( s )+
+ [ U 0( s 0) + V 00 ( s 0) : X 0( s )] o W 0( s ) - 1°. На сегментах A0 11 A1 систему СДУ для вычисления вектора Z 1( s ) = col( X 0( s ) , X 1( s )) можно представить так:
XX 0( s ) = P 0( s 0) + Q 00( s 0) X 0( s )+
+ [ U 0( s 0) + V 00( s 0) : X 0( s )] o W 0( s ) ,
X 1( s ) = p 1( s 1) + P 10( s 1) X 0( s )+
+ Q 10( s 1) X 0( s )+ Q 11( s 1) X 1( s )+
+ [ U 1( s 1) + V 10( s 1) : X 0( s )+ + V 11( s 1) : X 1( s )] o W 1( s ) .
... ... ... ... ... ... ... ... ...
v°. Рассматривая сегменты A0. A1 A v совместно, запишем систему СДУ для вычисления вектора Z v ( s ):
X 0( s ) = P 0( s 0) + Q 00( s 0) X 0( s )+
+ [ U 0( s 0) + V ю( S 0) : X 0( s )] o W 0( s ) , XX 1( s ) = p 1( s 1) + P 10 ( s 1) X 0( s ) +
+ Q 10( s 1) X 0( s ) + Q 11( s 1) X 1( s )+
+ [u 1( s 1)+ V 10( S 1) : X 0( s )+ + V 11( s 1) : X 1( s )] o W 1( s ) , ... ... ... ... ... ... ... ... ...
X v ( s ) = P v ( Sv ) + £ Pv,v-£ ( Sv ) X v-£ ( s ) + £ =1 v
+ ^2 Qv,v-£ ( sv ) Xv-£ ( s ) + £ =0
+ [ Uv ( Sv ) + ]T Vv,v-£ ( Sv ) : X v-£ ( s )] o W v ( S ) -£ =0
( v + 1)°. На ссгментах Ao. A i A V. A V +i уравнения для компонентов случайной векторной функции Z V +1( s ) можно записать в следующем виде:
XX 0( s ) — Р 0( s q ) + Q qq ( s q ) X q ( s ) +
+ [ U o( s q ) + V qq ( s q ) : X o( s )] o W o( s ) , X 1( s ) — p 1 ( s 1) + P 1Q( s 1) X q ( s ) +
+ Q 10( s 1) X 0( s ) + Q 11( s 1) X 1( s )+
+ [ U 1( s 1) + V 10( s 1) : X o( s )+
+ V 11 ( s 1) : X 1( s )] o W 1 ( s ) ,
V
X V ( s ) — P v ( sv ) + ]T Pv,v-e ( sv ) X v-e ( s ) + £ =1
V
+ У^ Qv,v-£ (s„) Xv-e (s)+ e=q
+ [ U v ( sv ) + y V v,v - £ ( sv ) : X v-e ( s )] o W v ( s ) , e =q
X V +1( s ) p v ( sV + 1) +
V
+ Pv,v-£ (sv+1) X V-e +1(s) + e =1
V
+ У Q v,v - £ ( sv +1) X v - £ +1( s ) + |^ Uv ( sv +1) + e =q
V
+ VVV-I ( sv +1) : X V-e +1( s )j o^W V +1 ( s ) .
e =q
№. Наконец, на сегментах Aq, A1; ..., A V, A V +1; ..., A n систему СДУ для вычисления вектора Z n ( s ) можно представить так:
X 0( s ) — Р 0( s 0) + Q 00( s 0) X 0( s )+
+ [ U o( s о) + V 00( s о) : X o( s )] o W q ( s ) , X 1( s ) — p 1 ( s 1) + P 10( s 1) X 0( s ) +
+ Q 10( s 1) X 0( s ) + Q 11( s 1) X 1( s )+
+ [ u 1( s 1) + V 10( s 1) : X o( s )+
+ V 11 ( s 1) : X 1( s )] o W 1 ( s ) ,
V
XV (s) — Pv (sv) + У Pv,v-£ (sv) XV-e (s) + e =1
V
+ У Qv,v-e(sv) Xv-e(s)+ e=o
V
+ [ U v ( sv ) + ]T Vv,v-e ( sv ) : X v-e ( s )] o W „ ( s ) , e =o
XV + 1( s ) p v ( sV + 1) I
V
+ Pv,v-£ (sv +1) Xv-£ +1(s) + e=1
V
+ У Qv,v-e ( sv +1) Xv-e +1( s ) 1 |^ Uv ( sv +1)+ e =o
V
+ V-v-e ( sv +1) : X v-e +1( s )] o W v +1( s ) .
e =o
X N ( s ) — P v ( s n ) +
V
+ Pv,v-e (sn ) Xn-e (s)+ e=1
V
+ У Qv,v-e ( s n ) X n -e ( s )+ Цл ( s n )+ e =o
V
+ У Vv,v-e ( s n ) : X n -e ( s )] o W n ( s ) . e =o • • • ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■
-
2. Вывод уравнений для моментов
Теперь построенную выше па основе применяемой схемы цепочку параметрических линейных СДУ без запаздывания можно использовать для получения повой последовательности уравнений - последовательности ОДУ для первых моментов векторов Zq, Z 1; ..., Zn, ••• и Z + — col(Yо, Zо). Z + — col(Yо, Z1) ZN — col(Yq, ZN). причем mk (s) — M [Zk] = col( mx □, mx 1,..., mXk), m+ (s) — M[ Z+] — col( m*, mk (s)),
Dk ( s ) — M [ Z kk - m k) (Zk - m^ ] —
DX 0 X 0 DX 0 X 1 ... DX 0 X k
Dx 1 X 0 DX 1 X 1 ... DX 1 X k
— ,
... ... ... ...
_ DX k X 0 DX k X 1 ... DX k X k
|
D + ( s ) — |
' Dk +(11)( s ) . ... . |
.. D k +(12) ( s ) .. ... |
|
_ Dk +(21)( s ) . |
.. D k +(22) ( s ) |
|
D +(11)( s ) — |
DY j X 0 DY' j X 0 DY' 0 X 0 DX 0 X 0 _ DY- 0 X 1 DX 1 X 0 |
DY 0 X 1 DX 0 X 1 DX 1 X 1 |
|
Dk +(12)( s ) — |
[ DY' 0 X k , DX 0 X k , DX 1 X k ] T |
|
|
Dk +(21)( s ) — |
DY' 0 X k DX k X 0 |
DX k X 1 |
|
D +(22) ( s ) — [ DXkXk |
] , |
|
|
k |
— 0 , 1 , 2 , ...,N,... |
|
В связи с тем что вектор m k ( s ) и матрица Dk ( s ) являются блоками вектора m +( s ) и матрицы D + ( s ) соответственно, достаточно вычислить только последние, а затем выбрать их необходимые элементы.
Несложно увидеть, что на каждом этапе r (r = 0, 1, ..., N , ...) структура систем СДУ принимает следующую форму:
Z r ( s ) = f r ( Z r ( s ) ,s ) + Gr ( Z r ( s ) , s ) ◦ S r ( s ) , ( 4 )
где
f r = {fri},
Gr = {grik},
n ( r +1)
fri — fr 0 i ( s ) + ^ frij ( s ) ' Zrj ( s ) , j =1
n ( r +1)
grik — gr 0 ik ( s ) +
E grj ( s ) • Zr3 ( s ) ,
j =1
i — 1 , 2 , ..., n ( r +1) , k — 1 , 2 , ..., m ( r + 1) .
Используя компоненты векторов f r и матриц Gr и заменяя в них элементы случайного вектора Zr их возможными значениями, по формулам Стратоновича [15] мы можем вычислить коэффициенты сноса и диффузии ari
n ( r +1) m ( r +1)
— fri + 2 E E j=1 k=1
∂grik ∂zrj
grjk ,
m(r+1) brij — gnk grjk, k=1
i,j — 1 , 2 , ..., n ( r + 1)
уравнения Фоккера - Планка - Колмогорова для плотности вероятности вектора Z r ( s ). В свою очередь, па основе этого уравнения может быть построена замкнутая система ОДУ для элементов векторов m r ( s ) и матрип Dr ( s ) в следующем виде:
m„ ( s ) — M [ a„],
D rij ( s ) — M[( zri mri ) • arj +
+ ( zrj mrj ) • ari + brij ] . ^X)
К этим уравнениям необходимо добавить начальные условия, форма которых будет такова:
mri (0) — |
mi*, mr-1 ,i (т),
r — 0 , r > 0;
Dr + (0) —
D*
D*
D*
D*
D + - 1(0) D^
,
Dri2)
Dr22)
, r> 0 ,
(Ю)
D r i2) —
DY 0 X r - 1 ( т ) DY о X r — i ( т ) DX о X r - 1 ( т )
...
DX- 2 X r — i ( т )
Dr 21) — [ DX r - 1 Y о ( т ) DX r - 1 Y о ( т )
DX r 1 X 0 ( т ) ... DX r - 1 X r - 2 ( т )] ,
D? 2 — DX r - 1 X r - 1 ( т ) .
-
3. Примеры
Для демонстрации изложенной методики был осуществлен анализ поведения нескольких стохастических систем различной размерности. Некоторая часть полученных результатов приводится ниже. Все численно-аналитические расчеты были проведены с помощью программ па входном языке пакета Mathematica [14].
В качестве первой исследуемой модели была выбрана система
X(t) — q00 X(t) + [uо + v00 X(t)] W(t), t G (0,т], m(0) — m*, D(0) — D*;
X ( t ) — p 10 X ( t— т ) + q 10 X ( t— т ) + q 11 X ( t )+
+ [u 1 + v 10 X(t — т) + v 11X(t)] VW(t), t G (т, 2т];
X ( t ) — p 20 X ( t - 2 т ) + p 21 X ( t - т )+
+ q 20 X ( t - 2 т ) + q 21 X ( t - т ) + q 22 X ( t )+
+ [ u 2 + v 20 X ( t — 2 т ) + v 21 X ( t — т )+
+ v22 X (t)] W(t) , t > 2т, где pij, qij, ui, vij - постоянные. На рис.1 и 2 изображено поведение математического ожидания и дисперсии X(t) при следующих значениях параметров:
u 0 — 0,125, v 00 — 0,1, p 10 — 0,25, q 10 — 0,25, q 11 — 1, u 1 — 0,1, v 11 — 0,1, p 20 — 0,25, p 21 — - 0,125, q 20 — 0,25, q 21 — — 0,25, q 22 — —1, u 2 — — 0,125, v 20 — 0,1, v 21 — 0,05, v22 — 0,05,
-
q 00 : a ) — 1 , b ) — 2 ,
2.0
0.5
0.0
0.4
v 10 : a) 0,25, b) — 0,125, т — 0.5, 10 — 0, m0 — 2, D0 — 0,25.
1.5
1.0
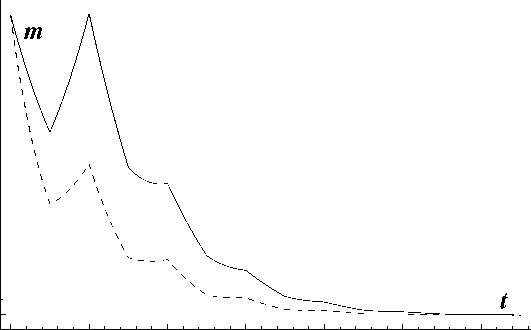
Рис.1
0.0 0
D
0.3
0.1
0.2
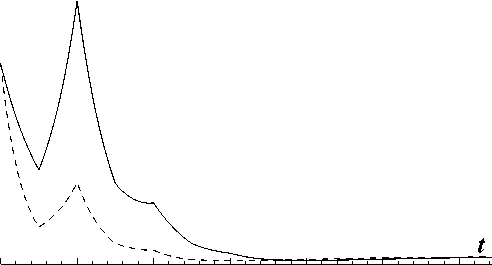
Рис.2
На этих рисунках случаю а) соответствуют непрерывные линии, а Ь) - штриховые.
Заключение
Методика, описанная в данной работе, может быть эффективно реализована па основе любого современного ПКА, такого как Maple или Matlab [6,16], и использована для изучения многих типов систем с последействием как па основе полученных ОДУ для первых моментов, так и с помощью метода статистического моделирования (Монте-Карло) [17] в случае нелинейных систем. В отличие от известных других методов изложенная методика не предполагает предварительного изменения уравнений исследуемого объекта с целью исключения запаздывания. Более того, данная схема позволяет вычислять моментные функции и более высоких порядков.
Список литературы Линейные параметрические стохастические системы нейтрального типа с кратными запаздываниями
- Азбелев Н.В., Максимов В.П., Рахматуллина Л.Ф. Введение в теорию функционально-дифференциальных уравнений. М.: Наука, 1991. 280 с.
- Беллман Р., Кук К. Дифференциально-разностные уравнения. М.: Мир, 1967. 548 с.
- Хейл Дж. Теория функционально-дифференциальных уравнений. М.: Мир, 1984. 421 с.
- Эльсголъц Л.Э., Норкин СБ. Введение в теорию дифференциальных уравнений с отклоняющим аргументом. М.: Наука, 1971. 296 с.
- Bellen A., Zennaro М. Numerical Methods For Delay Differential Equations. Oxford: University Press, 2003. 416 p.
- Shampine L.F., Gladwell L, Thompson S. Solving ODEs with Malab. Cambridge: University Press, 2003. 272 p.
- Рубаник В.П. Колебания сложных квазилинейных систем с запаздыванием. Минск: Изд-во "Университетское", 1985. 143 с.
- Царьков Е. Ф. Случайные возмущения дифферешщально-функциональных уравнений. Рига: Зииатне, 1989. 421 с.
- Kushner H.J. Numerical methods for controlled stochastic delay systembi. Boston: Birkhauser, 2008. XIX, 281 p.
- Полосков И.Е. Расширение фазового пространства в задачах анализа дифференциально-разностных систем со случайным входом//Автоматика и телемеханика. 2002. № 9. С.58-73.
- Полосков И.Е. Компьютерное моделирование динамики загрязнения бассейна реки с учетом запаздывания и случайных факторов//Вычислительные технологии. 2005. Т. 10, № 1. С.103-115.
- Poloskov I.E. Symbolic-numeric algorithms for analysis of stochastic systems with different forms of aftereffect//Proc. in Applied Mathematics and Mechanics (PAMM). 2007. Vol.7, Is.l. P.208001.1-2080012.
- Malanin V. V.; Poloskov I.E. About some schemes of study for systems with different forms of time aftereffect//Proc. of the IUTAM Symp. on Nonlinear Stochastic. Dynamics and Control (Hangzhou, China)/eds. W.Q.Zhu, Y.K.Lin, G.C.Cai: IUTAM Bookseries, Vol. 29. Dordrecht: Springer, 2011. P. 55-64.
- Wolfram S. The Mathematica Book: 5th ed. Champaign, Б: Wolfram Media, 2003. 1488 p.
- Маланин В.В., Полосков И.Е. Методы и практика анализа случайных процессов в динамических системах: учеб. пособие. Ижевск: РХД, 2005. 296 с
- Abell M.L., Braselton J.P. Maple by Example. 3d ed. Amsterdam e.a.: Elsevier Inc., 2005. 563 p.
- Лоу А., Келътон В. Имитационное моделирование. Классика CS. 3-е изд. СПб.: Питер; Киев: Изд. группа BHV, 2004. 847 с.
