Математическая модель дизель-генератора переменного тока со статической нагрузкой

Автор: Одинаев В.А., Шигапов И.И., Долгов В.А., Саськов К.Г.
Рубрика: Математика
Статья в выпуске: 4 т.16, 2024 года.
Бесплатный доступ
Решение задачи технического диагностирования состояния энергетических установок на борту надводных кораблей и неатомных подводных лодок требует применения переносных диагностических комплексов, ключевым элементом которых является математическая модель дизель-генератора. Комплексная математическая модель дизель-генератора представляется как результат объединения математических моделей дизеля и синхронного генератора. Функционирование дизеля моделируется на основе агрегированной базовой математической модели корабельного двигателя внутреннего сгорания, реализованной на примере дизель-генераторной установки неатомной подводной лодки. Математическая модель синхронного генератора реализуется системой дифференциальных уравнений с учетом конструктивных особенностей отдельно взятого генератора, позволяет рассчитывать оценки эталонных характеристик исправных дизель-генераторов в заданных внешних условиях и режимах работы и моделировать характерные неисправности. Применение разработанной математической модели обеспечивает возможность получить количественную оценку и провести категорирование технического состояния дизель-генератора на основе анализа отклонений фактических значений диагностических параметров от эталонных, приведенных к текущим параметрам режима и внешних условий эксплуатации, а также выполнить моделирование возможных неисправностей объекта диагностирования для прогнозирования технического состояния и рисков отклонения от режима нормального функционирования. Результаты моделирования являются основой для автоматизированного формирования рекомендаций по эксплуатации, проведению технического обслуживания и ремонту дизель-генераторов, эксплуатируемых в составе энергетических установок надводных кораблей и неатомных подводных лодок.
Судовое энергетическое оборудование, синхронный генератор, математическая модель генератора, дизель-генератор, цифровой диагностический комплекс
Короткий адрес: https://sciup.org/147246007
IDR: 147246007 | УДК: 004.891.3+519.876.5 | DOI: 10.14529/mmph240407
Mathematical model of an ac diesel generator with static load
The solution to the problem of technical diagnostics of the state of power plants on board surface ships and non-nuclear submarines requires the use of portable diagnostic systems. Their key element is a mathematical model of a diesel generator. The paper presents a comprehensive mathematical model of a diesel generator as a result of combining mathematical models of a diesel engine and a synchronous generator. The operation of a diesel engine is modeled on the basis of an aggregated basic mathematical model of a marine internal combustion engine, implemented on the example of a diesel generator plant of a non-nuclear submarine. The mathematical model of a synchronous generator is implemented by a system of differential equations taking into account the design features of a single generator. It allows calculating estimates of the reference characteristics of serviceable diesel generators in specified external conditions and operating modes and simulating typical faults. The use of the developed mathematical model makes it possible to obtain a quantitative estimate and categorize the technical condition of a diesel generator based on the analysis of deviations of actual values of diagnostic parameters from the reference values, reduced to the current parameters of the mode and external operating conditions. It also helps simulate possible faults of the diagnostic object to predict the technical condition and risks of deviation from the normal operating mode. The modeling results are the basis for the automated formation of recommendations for the operation, maintenance and repair of diesel generators used in power plants of surface ships and non-nuclear submarines.
Текст научной статьи Математическая модель дизель-генератора переменного тока со статической нагрузкой
Эксплуатация надводных кораблей и неатомных подводных лодок в современных условиях сопряжена с необходимостью нивелирования противоречия между максимально полным использованием имеющихся в наличии кораблей и необходимостью сбережения имеющегося ресурса технических средств [1-3]. В этих условиях процедуры технического диагностирования становятся необходимым условием обеспечения надежной эксплуатации энергетической установки корабля [4, 5].
Техническое диагностирование дизель-генераторной установки позволяет определять оптимальные сроки технического обслуживания и ремонта в соответствии с объективным фактическим состоянием технических средств и учетом директивных ограничений, которые определяются нормами эксплуатации и ремонта оборудования [6, 7]. Встроенные средства контроля технического состояния энергетического оборудования в большей степени ориентированы на предупреждение аварийных ситуаций, а не на диагностирование состояния объектов [8]. Поэтому для углубленного технического диагностирования на борту надводных кораблей и неатомных подводных лодок целесообразно использовать переносные диагностические комплексы, реализующие современные методологические подходы, основанные на применении цифровых технологий. Переносной диагностический комплекс должен включать необходимые измерительные приборы, датчики и программное обеспечение сбора и обработки информации [9, 10]. Но ключевым его
Одинаев В.А., Шигапов И.И., Математическая модель дизель-генератора Долгов В.А., Саськов К.Г. переменного тока со статической нагрузкой элементом должна быть математическая модель дизель-генератора, учитывающая условия его эксплуатации, техническое состояние и влияние внешних условий.
Целью исследования являлась разработка математической модели дизель-генератора переменного тока со статической нагрузкой неатомной подводной лодки типа 28ДГ, состоящего из корабельного дизеля 8ЧН26/26 и генератора СБГД-1000. Отличительная особенность этого ди-зель-генератора состоит в том, что, выступая на корабле в качестве источника постоянного тока, генератор одновременно является синхронной электрической машиной, которая работает на выпрямитель.
Математическая модель дизель-генератора
Имитация функционирования приводного дизеля 8ЧН26/26 из состава дизель-генераторной установки осуществляется на основе агрегированной базовой математической модели функционирования корабельного двигателя внутреннего сгорания (БММ), разработанной коллективом научной школы профессора П.М. Гацака [11, 12]. В основе модели лежит аналитическое описание влияния на параметры функционирования корабельных дизелей не только факторов режима (сочетание частоты вращения коленчатого вала и эффективной мощности), но и параметров внешних условий (барометрическое давление, температура и относительная влажность атмосферного воздуха, температура забортной воды), технического состояния и регулировки отдельных элементов, влияющих на воздухоснабжение, газообмен, индикаторные процессы, механические потери и др. Такая математическая модель успешно применяется в научных исследованиях [12].
Основной особенностью БММ функционирования двух- и четырехтактных двигателей внутреннего сгорания (ДВС) с различными схемами воздухоснабжения на установившихся и неуста-новившихся режимах является ее целевая функция - поиск точки совместной работы всех агрегатов дизеля, т. е. нахождение такого количества воздуха, прошедшего через газовоздушный тракт дизеля, которое удовлетворяет всем заданным условиям (параметров режима, внешних (атмосферных) условий, технического состояния и регулировки). В качестве критерия сходимости та- ких итерационных расчетов с заданной точностью грв принято условие [11]:
G V 0 - G ВЫХ G ВЫХ
— £( ,
G В
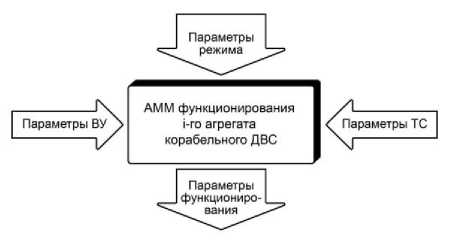
Рис. 1. Схема автономной математической модели агрегата ДВС (АММ – совокупность автономных математических моделей, ВУ – внешние условия, ТС – техническое состояние)
где GВЫХ = GГЦ + G yT G T .
Агрегированная БММ состоит из совокупности автономных математических моделей (АММ) агрегатов дизеля, представляющих собой совокупность алгебраических, трансцендентных, регрессионных уравнений и различных функциональных ограничений. Существующие между автономными моделями отдельных агрегатов прямые и обратные функциональные связи реализуются в основной управляющей модели.
В автономных математических моделях агрегатов используются известные уравнения из теории ДВС, а также зависимости, описывающие индикаторные процессы, газообмен, составляющие механических потерь, показатели агрегатов турбонаддува и т. д., полученные за последние десятилетия [11–16]. Схема автономной математической модели агрегата ДВС представлена на рис. 1.
Основная задача частной математической модели «Отдельный цилиндр ДВС» сводится к вы- числению численных значений основных и дополнительных переменных, которые соответствуют реальному объекту при поддержании постоянными идентичных входных (основных и дополнительных) характеристик. К основным характеристикам относятся параметры газа на выходе из цилиндров дизеля (давления, температуры Тгц, газовой постоянной R^ и массового расхода GГц).
Одним из самых сложных трансцендентных уравнений частной математической модели «Отдельный цилиндр ДВС» является выражение для определения среднемассовой температуры газовоздушной смеси на выходе цилиндра [11]:
Математика
Т гц = L о • а С • G t • 0,24 • ( Т кц - 273) - G yT Z • 0,24 • (Т срУТ - 273) + 0,445 • G k • ( Т кц - 273) +
+
Hu^GrJl -ni-Z cm- Cs^ N™ '^^
0,228 + 1,64 - 10 - 2 a c
+
^ 2,625 - 10 — 5 + 6 - 10 — 6 ^
a c
• ТГЦ
4,18 •
ч RT* - 1 1 - 0,18 ) 29,3
+ 273.
a £ c J
• GГЦ
Газовая постоянная R ГЦ на выходе из цилиндра определяется с помощью известного выражения [11], а массовый расход газа через поршневую часть двигателя определяется как
GГЦ = Gvy + GT, где Gvц – массовый расход воздуха после выпадения конденсата в воздухоохладителе, кг/ч. Из дополнительных выходных переменных оценка часового расхода топлива Gт кг/ч может быть определена по формуле [4]:
G T = 632,3-- e— ,
Hu • n e

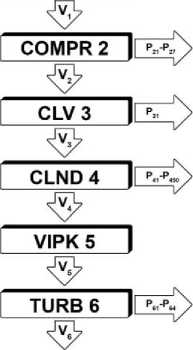
Рис. 2. Структурная схема математической модели функционирования корабельного ДВС с осреднённой поршневой частью
где n e — эффективный КПД двигателя вычисляется как произведение механического КПД п м и индикаторного КПД n i , т - е. П е = П м • n i , при этом, механический КПД определяется как П м = Ne / N i' , а индикаторный КПД - с помощью произведения относительных сомножителей, полученных в результате натурных и расчетно-экспериментальных исследований [5, 11, 12, 17–19]:
П і = П іб • П т • n ia • П л • ni £ • nZ cm • Піп д • nir • niG k -П
В свою очередь индикаторная мощность двигателя N i , кВт, определяется по формуле
-
1 e + трд нх тк '
Принципиальным моментом БММ является ее инвариантность к типу главной энергетической установки или к проекту корабля. Универсальность БММ обеспечивается возможностью ее настройки применительно к заданной версии или типу двигателя и проверяется сравнением расчетов на БММ функционирования ДВС с соответствующими результатами стендовых заводских или корабельных испытаний.
Версии агрегированной БММ для приводного дизеля 8ЧН26/26 позволяют адекватно моделировать рабочие процессы в «осредненной» поршневой части, «развернутой» по отдельным блокам и цилиндрам, а также учитывают особенности схем воздухоснабже-ния, газоотвода и др. Эти требования выполняются уже на этапе формирования структуры версии БММ функционирования среднеоборотных ДВС размерности 26/26.
Топологическая структурная схема математической модели функционирования корабельного ДВС с осреднённой поршневой частью, приведенная на рис. 2, состоит из шести моделей-модулей: впускного устройства VPU 1; компрессора COMPR 2; воздухоохладителя CLV 3; осредненной поршневой части двигателя CLND 4 с включенным в него механизмом изменения угла опережения подачи топлива; осредненного выпускного коллектора VIPK 5; газовой турбины TURB 6. Каждый модуль имеет четыре типа перемен ных (два типа входных и два типа выходных переменных). Схема математической модели i-го модуля дизеля аналогична представленной на рис. 2, то есть V0, V1 , V2, V3, V4, V5, V6 – входные и выходные параметры воздуха (газа); Z11 … Z13, Z21 … Z27, Z31 … Z36, Z41 … Z437, Z51 … Z59, Z61 … Z68 – дополнительные входные переменные, характеризующие параметры нагрузки, технического состояния, конструктивные данные, внешние условия; P21…P27, P31, P41…P450, P61…P64 – дополнительные выходные переменные, характеризующие параметры
Одинаев В.А., Шигапов И.И., Долгов В.А., Саськов К.Г.
Математическая модель дизель-генератора переменного тока со статической нагрузкой рабочего процесса каждого агрегата. Некоторые выходные параметры функционирования ДВС являются диагностическими параметрами. Для определения выходных параметров используются соответствующие математические зависимости из исходной математической модели функциони- рования корабельного ДВС.
Структурная схема (см. рис. 2) в полном объеме обеспечивает решение параметрического диагностирования газовоздушного тракта (ГВТ) дизеля 8ЧН26/26 в составе ди-зель-генераторной установки ДГУ-28ДГ, но накладывает ограничение на её применение для моделирования рабочих процессов с дифференциацией по блокам и отдельным цилиндрам двигателя.
Для обеспечения задачи углубленного диагностирования блоков и цилиндров дизеля используется математическая модель функционирования корабельного ДВС 8ЧН26/26 с дифференциацией рабочих процессов по i -му блоку и j -му цилиндру.
Топологическая структурная схема математической модели приведена на рис. 3. Моделирование многоцилиндровой поршневой части производится в результате многократного обращения к математической модели отдельного i -го цилиндра, включения прямых и обратных связей между математическими моделями других агрегатов ДВС, а также определения точки совместной работы всех агрегатов ДВС по массовому расходу
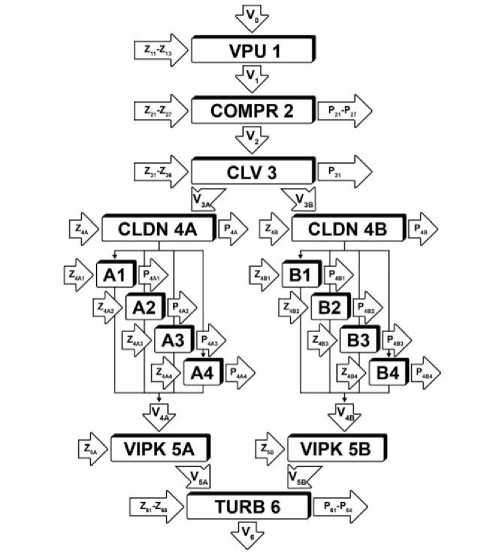
Рис. 3. Топологическая структурная схема математической модели корабельного ДВС с дифференциацией рабочих процессов по блокам и цилиндрам применительно к дизелю 8ЧН26/26
воздуха.
В представленной на рис. 3 топологической структурной схеме: А1...A4, B1…B4 – модели отдельного цилиндра в i -м блоке главного двигателя; V3A, V3B, V4A, V4B – входные и выходные параметры воздуха (газа) осредненной по i -му блоку поршневой части двигателя; V3A1...V3A4, V3B1...V3B4 – параметры воздуха на входе в каждый цилиндр i -го блока; V4A1...V4A4, V4B1...V4B4 – параметры газа на выходе из каждого цилиндра i -го блока; Z3A1...Z3A4, Z3B1...Z3B4 – дополнительные входные переменные для каждого цилиндра, характеризующие параметры нагрузки, технического состояния, конструктивные данные, внешние условия; P3A1...P3A4, P3B1...P3B4 – дополнительные выходные переменные, характеризующие параметры рабочего процесса в каждом цилиндре.
Математическая модель синхронного генератора
Генератор представляет собой шестифазную синхронную машину с бесконтактным возбуждением. На статоре размещены две трехфазные обмотки, соединенные по схеме «звезда», которые сдвинуты относительно друг друга на 30°, с изолированной нейтралью. Выходы каждой обмотки подключены к трехфазному выпрямителю по схеме Ларионова (рис. 4). L
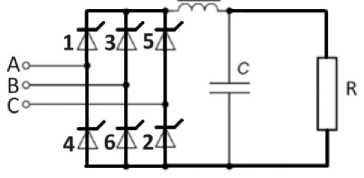
Рис. 4. Выпрямитель, подключенный к клеммам А, В, С трёхфазной обмотки статора (А, В, С – клеммы трёхфазной обмотки статора, R – нагрузка, LC – сглаживающий фильтр на выходе выпрямителя, L – индуктивность, С – ёмкость)
При математическом моделировании приняты следующие допущения ввиду незначительности их влияния на моделируемые процессы: потери в стали (явления гистерезиса и вихревые токи) не
Математика
учитываются; насыщение магнитопровода не учитывается; считается, что воздушный зазор между телом ротора и статором неизменный, как и магнитная проводимость; высшие пространственные гармоники магнитного поля не учитываются, то есть распределение магнитного поля каждой из обмоток вдоль окружности ротора и статора принято синусоидальным; статор имеет симметричные трехфазные обмотки.
Математическая модель генератора реализуется системой дифференциальных уравнений [20, 21] с учетом влияния взаимной индуктивности между обмотками. Уравнения потокосцеплений для первой обмотки статора (первой «звезды») имеют следующий вид:
ш. = L .I,+ m i + m i,+ m i,+ m i,, + m i,+ mi a 1 a 1 a 1 a 1 b 1 b 1 a 1 c 1 c 1 a 1 a 2 a 2 a 1 b 2 b 2 a 1 c 2 c 2 a 1 fdfd
-
w,. = LI + m i.+ m i.+ m i,+ m i., + m i,+ mi
r b 1 b 1 b1 b1 a 1 a 1 b1 c 1 c 1 b 1 a 2 a 2 b 1 b 2 b 2 b 1 c 2 c 2 b1 fdfd
-
w. = L .I.+ m i + m i.+ m i,+ m i,,+ m i,+ mi
t c 1 c 1 c 1 c 1 b 1 b 1 c 1 a 1 a 1 c 1 a 2 a 2 c 1 b 2 b 2 c 1 c 2 c 2 c 1 fdfd где w — потокосцепление обмотки; индексы 1, 2 - номер «звезды»; i - ток фазы; L - собственная индуктивность обмотки; m - взаимная индуктивность между обмотками с соответствующими индексами; f - символ обмотки возбуждения; d - символ продольной оси ротора.
Уравнения потокосцеплений y a 2 , yb 2 , yc 2 для второй обмотки статора (второй «звезды») записываются аналогично. Уравнение потокосцепления обмотки возбуждения имеет вид:
Wfd = LfdIfd + mfda 1 ia 1 + mfdb1 ib 1 + mfdc 1 ic 1 + mfda2 ia2 + mfdb2 ib2 + mfdc2 ic2 , а система уравнений синхронного генератора имеет следующий вид:
Каждая «звезда» генератора работает непосредственно на мощный выпрямитель, выполненный по схеме Ларионова (см. рис. 4). В процессе математического моделирования вентили выпрямителя представляются в схеме замещения сопротивлениями R VD в прямом и бесконечно большим сопротивлением в обратном направлениях. Звено выпрямителя рассматривается совместно со схемой замещения [21] одной «звезды» синхронного генератора (рис. 5).
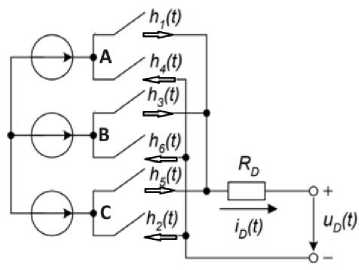
Рис. 5. Звено выпрямителя совместно со схемой замещения одной «звезды» статора: ( h 1 (t), h 2 (t), h 3 (t), h 4 (t), h 5 (t), hs(t) - ключи, эквивалентные состоянию вентиля [0>закрыт, 1>открыт]; iD(t) - выпрямленный ток; uD(t) - выпрямленное напряжение; RD= 2 RVD, стрелки – направление тока, протекающего через каждый вентиль)
Нумерация вентилей соответствует порядку их включения в схеме Ларионова. Открытие вентиля происходит в небольшом промежутке времени, когда на нём действует прямое напряжение.
Одинаев В.А., Шигапов И.И., Математическая модель дизель-генератора Долгов В.А., Саськов К.Г. переменного тока со статической нагрузкой В этом промежутке подаётся импульс на управляющий электрод S (если это тиристор) или напряжение на открытие затвора G (если это транзистор IGBT). Закрытие вентиля происходит, когда напряжение на нём меняется с прямого на обратное.
Временной график функционирования выпрямителей представлен на рис. 6. Здесь столбцы, помеченные VZ1, относятся к первой «звезде» и к первому выпрямителю, а столбцы, помеченные VZ2 – ко второй «звезде» и ко второму выпрямителю; l 1 ( t ) , l 2 ( t ) , l 3 ( t ) , l 4 ( t ) , l 5 ( t ) , l 6 ( t ) – промежутки времени, в которые подаются импульсы на открытие вентилей первого выпрямителя; k 1 ( t ) , k 2 ( t ) , k 3 ( t ) , k 4 ( t ) , k 5 ( t ) , k 6 ( t ) – промежутки времени, в которые подаются импульсы на открытие вентилей первого выпрямителя; Т = 360° – период синусоиды напряжения (физически это 10 мс при частоте тока 100 Гц).
В нижней части рис. 6 представлен график выпрямленного напряжения (без учета действия сглаживающего фильтра). Таким образом, в генераторной установке используется двенадцати-пульсная система выпрямления переменного тока.
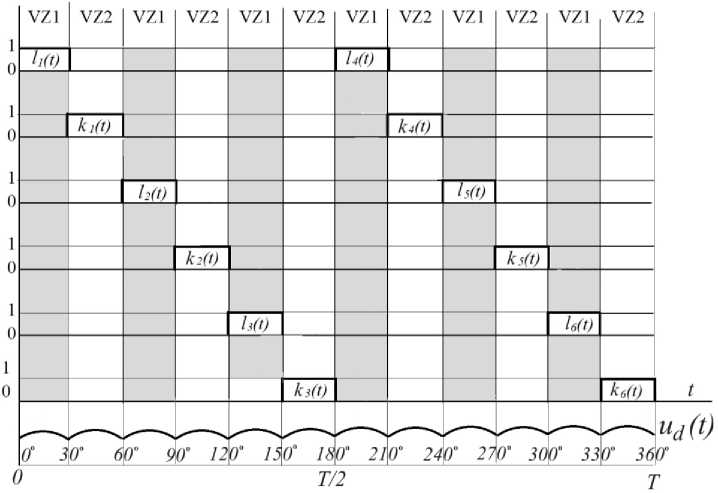
Рис. 6. Промежутки времени, в которые подаются импульсы на открытие вентилей; выпрямленное напряжение u D ( t ) на протяжении одного периода синусоиды Т = 360° (10 мс)
Направления тока и замкнутые ключи в течение одного периода синусоиды Т = 360º (10 мс)
|
Фрагмент синусоиды |
Направление тока |
Замкнутые ключи |
|
От 0° до 30° |
От клеммы А 1 к клемме В 1 |
h 1 и h 6 первого выпрямителя |
|
От 30° до 60° |
От клеммы А 2 к клемме В 2 |
h 1 и h 6 второго выпрямителя |
|
От 60° до 90° |
От клеммы А 1 к клемме С 1 |
h 1 и h 2 первого выпрямителя |
|
От 90° до 120° |
От клеммы А 2 к клемме С 2 |
h 1 и h 2 второго выпрямителя |
|
От 120° до 150° |
От клеммы B 1 к клемме C 1 |
h 3 и h 2 первого выпрямителя |
|
От 150° до 180° |
От клеммы B 2 к клемме C 2 |
h 3 и h 2 второго выпрямителя |
|
От 180° до 210° |
От клеммы B 1 к клемме A 1 |
h 3 и h 4 первого выпрямителя |
|
От 210° до 240° |
От клеммы B 2 к клемме A 2 |
h 3 и h 4 второго выпрямителя |
|
От 240° до 270° |
От клеммы C 1 к клемме A 1 |
h 5 и h 4 первого выпрямителя |
|
От 270° до 300° |
От клеммы C 2 к клемме A 2 |
h 5 и h 4 второго выпрямителя |
|
От 300° до 330° |
От клеммы C 1 к клемме B 1 |
h 5 и h 6 первого выпрямителя |
|
От 330° до 360° |
От клеммы C 2 к клемме B 2 |
h 5 и h 6 второго выпрямителя |
При расчётах учитывается, что в каждый момент времени через статическую нагрузку идёт только один ток (см. табл., столбец 2), а численное интегрирование для решения системы уравнений выполняется при замкнутой одной паре ключей (см. табл., столбец 3), остальные ключи разомкнуты.
Анализ кривых напряжения и тока генератора, полученные с использованием осциллографа Fluke 190 во время испытаний постов дистанционного контроля на подводной лодке «Кронштадт», и спектры напряжения и тока генератора, полученные с использованием программного
Математика
обеспечения прибора Fluke 190 методом дискретного быстрого преобразования Фурье, позволяет сделать вывод о большом вкладе 5-й, 7-й, 11-й, 13-й и 17-й гармоник в процесс формирования несинусоидальных тока и напряжения генератора, включённого на мощный выпрямитель. Это соответствует разработанной математической модели и вполне характерно для систем выпрямления, не имеющих схем пассивной компенсации высших гармоник.
Совокупность собранных диагностических параметров, результатов работы математических моделей оценивания технического состояния и прогнозирования составляет цифровой портрет дизель-генератора (его цифровой двойник на этапе эксплуатации).
Разработанная математическая модель дизель-генератора переменного тока со статической нагрузкой позволяет: на первом этапе (прямая задача диагностирования) – получить количественную оценку и провести категорирование технического состояния дизель-генератора на основе анализа отклонений фактических значений диагностических параметров от «эталонных» (приведенных к текущим параметрам режима и внешних условий), а на втором этапе (обратная задача диагностирования) – получить количественную оценку технического состояния дизель-генератора и его элементов с моделированием возможных неисправностей объекта диагностирования для последующего сравнения с накопленным массивом параметров технического состояния и определения возможных рисков отклонения от режима нормального функционирования.
На этапе диагностики технического состояния дизель-генератора собранные фактические и расчетные параметры технического состояния передаются в диагностическую систему для принятия управленческих решений. Для этого широко применяют беспроводные и цифровые технологии [22–26], а компенсация помех и искажений при регистрации и передаче характеристик состояния дизель-генераторов обеспечивается за счет применения методов теории оптимальных динамических измерений [27, 28].
Заключение
Разработанная математическая модель дизель-генератора переменного тока со статической нагрузкой является основой единой цифровой платформы функционирования переносных диагностических комплексов информационной поддержки жизненного цикла энергетических установок, эксплуатируемых на борту надводных кораблей и неатомных подводных лодок. Ее применение позволяет рационально планировать техническое обслуживание корабельных энергетических установок по фактическому состоянию. Кроме этого, предложенная математическая модель эффективно применяется в составе компьютерных учебных комплексов профессиональной подготовки экипажей надводных кораблей и неатомных подводных лодок.
Список литературы Математическая модель дизель-генератора переменного тока со статической нагрузкой
- Батрак, Д.В. Система электродвижения для высокоскоростных судов / Д.В. Батрак, Д.В. Никущенко, А.П. Сеньков // Электротехника. - 2022. - № 11. - С. 59-64.
- Горшков, В.Ф. Проблемы энергетики надводных кораблей Военно-Морского Флота / B.Ф. Горшков, М.Б. Белов, Е.В. Цыбульский // Морской сборник. - 2022. - № 2 (2099). - C.35-41.
- Казанов, С.А. О проблемах выработки электроэнергии в системах электродвижения кораблей и судов / С.А. Казанов // Труды Крыловского государственного научного центра. - 2021. -№ 3 (397). - С. 83-91.
- Одинаев, В.А. Математическая модель пространства состояний корабельной электроэнергетической системы. Принятие оперативных решений / В.А. Одинаев // Судостроение. - 2003. -№ 5 (750). - С. 42-44.
- Печковский, П.Г. Обоснование инновационных технических решений в области корабельной энергетики перспективных многоцелевых кораблей / П.Г. Печковский // Вопросы оборонной техники. Серия 16: Технические средства противодействия терроризму. - 2021. - № 7-8 (157158). - С. 136-143.
- Цифровые двойники в теории и практике авиационной электроэнергетики / С.П. Халютин, И.Е. Старостин, А.О. Давидов и др. // Электричество. - 2022. - № 10. - С. 4-13.
- Шарашкин, С.В. Применимость различных типов электрических машин при построении систем электродвижения судов / С.В. Шарашкин // Судостроение. - 2022. - № 6 (865). - С. 33-35.
- Шелудько, В.Н. Основные направления развития судовой электротехники / В.Н. Шелудь-ко, Ю.В. Сентябрев, А.В. Григорьев // Электротехника. - 2021. - № 3. - С. 2-8.
- Сенсорные сети контроля состояния авиационной техники при испытаниях и эксплуатации / Е.С. Солдатов, А.В. Богомолов, Е.В. Ларкин, А.С. Солдатов // Авиакосмическое приборостроение. - 2024. - № 2. - С. 61-68.
- Булатов, Ю.Н. Киберфизические системы электроснабжения: моделирование, управление, идентификация / Ю.Н. Булатов, А.В. Крюков, К.В. Суслов. - Иркутск: ИНТУ, 2022. - 158 с.
- Современные бортовые переносные аппаратно-программные комплексы информационной поддержки, обучения и тренажа личного состава корабельных специалистов электромеханического профиля / П.М. Гацак, Ю.В. Пыльнев, С.И. Золотарёв, В.А. Долгов. - СПб.: ВМПИ, 2024. - 140 с.
- Золотарев, С.И. Методика создания программно-аппаратных комплексов информационной поддержки эксплуатации энергетической установки и специальной (электромеханической) подготовки экипажей надводных кораблей и подводных лодок на основе архитектуры цифровой платформы / С.И. Золотарев, И.А. Кирюхин, Ю.В. Пыльнев // Сборник трудов ВМПИ. - СПб.: ВМПИ, 2023. - С. 92-99.
- Андрюшкевич, С.К. Разработка цифрового двойника энергетической системы на основе онтологической модели / С.К. Андрюшкевич, С.П. Ковалёв, Е.И. Нефедов // Автоматизация в промышленности. - 2020. - № 1. - С. 51-56.
- Гришанов, С.А. Численные методы определения параметров математических моделей синхронных генераторов / С.А. Гришанов, А.М. Ларин, С.А. Зори // Вестник Донецкого национального университета. Серия Г: Технические науки. - 2022. - № 1. - С. 33-45.
- Данеев, А.В. Математическая модель шестифазного магнитоэлектрического генератора с мостовым выпрямителем и активно-индуктивной нагрузкой на выходе / А.В. Данеев, Р.А. Данеев, В.Н. Сизых // Современные технологии. Системный анализ. Моделирование. - 2022. - № 1 (73). - С. 21-29.
- Дядик, А.Н. Цифровой двойник электрохимического генератора / А.Н. Дядик, А.В. Юшков // Морской вестник. - 2023. - № 1 (85). - С. 72-74.
- Муртазин, Т.Э. Векторное управление гребным асинхронным электроприводом / Т.Э. Муртазин, В.Г. Титов, О.А. Мотина // Интеллектуальная электротехника. - 2021. - № 4 (16).
- Самосейко, В.Ф. Методика проектирования асинхронных гребных электродвигателей с заданным коэффициентом мощности / В.Ф. Самосейко, С.В. Шарашкин // Вестник Астраханского государственного технического университета. Серия: Морская техника и технология. - 2022. -№ 4. - С. 82-88.
- Сеньков, А.П. Перспективы совершенствования единых электроэнергетических систем с цифровым управлением на судах с электродвижением / А.П. Сеньков, Д.В. Никущенко, В.И. Кузнецов // Электротехника. - 2021. - № 5. - С. 41-46.
- Калинин, И.М. Компьютерная модель асинхронного гребного электропривода с тремя обмотками на статоре / И.М. Калинин // Труды Крыловского государственного научного центра. - 2021. - № 1 (395). - С. 132-140.
- Тумаева, Е.В. Математическая модель синхронного электропривода / Е.В. Тумаева. - Казань: КГТУ, 2008. - 93 с.
- Инерциально-спутниковая навигационная система управления транспортными средствами / В.Г. Макаренко, А.А. Подорожняк, С.В. Рудаков, А.В. Богомолов // Проблемы управления. -2007. - № 1. - С. 64-71.
- Soldatov, E.S. Digital Models, Sensor Network and Autonomous Telemetry Modules for Cryogenic Storage Systems / E.S. Soldatov, A.V. Bogomolov // Journal of Computational and Engineering Mathematics. - 2024. - Vol. 11, no 1. - P. 34-48.
- Макаренко В.Г., Богомолов А.В., Рудаков С.В., Подорожняк А.А. Технология построения инерциально-спутниковой навигационной системы управления транспортными средствами с нейросетевой оптимизацией состава вектора измерений // Мехатроника, автоматизация, управление. - 2007. - № 1. - С. 39-44. С. 59-67.
- Ларкин, Е.В. Моделирование надежности бортового оборудования мобильного робота / Е.В. Ларкин, Т.А. Акименко, А.В. Богомолов // Известия Саратовского университета. Новая серия. Серия: Математика. Механика. Информатика. - 2021. - Т. 21, Вып. 3. - С. 390-399.
- Ларкин Е.В., Солдатов Е.С., Богомолов А.В. Математическое обеспечение мониторинга состояния и управления режимами эксплуатации систем хранения криогенных продуктов // Вестник Южно-Уральского государственного университета. Серия «Математика. Механика. Физика». 2024. - Т. 16, № 1. - С. 23-31.
- Алгоритм численного нахождения оптимального измерения, искаженного инерционностью, резонансами и деградацией измерительного устройства / А.Л. Шестаков, С.А. Загребина, Н.А. Манакова и др. // Автоматика и телемеханика. - 2021. - № 1. - С. 55-67.
- Развитие теории оптимальных динамических измерений / Е.В. Бычков, С.А. Загребина, А.А. Замышляева и др. // Вестник Южно-Уральского государственного университета. Серия «Математическое моделирование и программирование». - 2022. - Т. 15, № 3. - С. 19-33.
