Математическая модель электродвигателя постоянного тока рулевой машины жидкостного ракетного двигателя

Автор: Белоногов Олег Борисович, Ронжин Иван Владимирович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Тепловые, электроракетные двигатели и энергоустановки летательных аппаратов
Статья в выпуске: 4 (35), 2021 года.
Бесплатный доступ
Статья содержит результаты разработки математической модели магнитоэлектрического двигателя постоянного тока рулевой машины жидкостного ракетного двигателя. В соответствии с теорией электрических машин, в математической модели рассматриваемого электродвигателя применяется единый электромагнитный коэффициент. Показывается, что повысить точность математической модели электродвигателя возможно путём применения вместо одного единого электромагнитного коэффициента двух различных коэффициентов математической модели: коэффициента электромагнитной скоростной связи и коэффициента моментной характеристики. Разрабатываются и предлагаются методы идентификации параметров математической модели магнитоэлектрического двигателя постоянного тока, имеющего естественную и искусственную статические характеристики, включающие определение его экспериментальных статических характеристик, вычисление значений параметров статических характеристик методом линейной регрессии и вычисление значений параметров математической модели электродвигателя по предлагаемым формулам.
Электродвигатель постоянного тока, математическая модель, метод идентификации параметров
Короткий адрес: https://sciup.org/143178169
IDR: 143178169 | УДК: 621.313.2:629.76.036.54-63:519.87 | DOI: 10.33950/spacetech-2308-7625-2021-4-93-99
Math model of a direct current motor for steering actuator of a liquid-propellant engine
The paper presents the results of development of a math model for a direct current motor of a liquid-propellant engine steering actuator. In accordance with the electrical machine theory, the math model of the motor uses a single electromagnetic coefficient. It is shown that the motor math model accuracy can be improved through the use, instead of a single electromagnetic coefficient, of two different coefficients of the math model: electromagnetic velocity coupling coefficient and torque curve coefficient. Elaborated and proposed are methods for identifying parameters of a math model of a magnito-electric DC motor that has natural and artificial static characteristics, which include determining its experimental static characteristics, calculating the values of static characteristics parameters using the linear regression method and calculating the values of the electric motor math model parameters using the proposed formulas.
Текст научной статьи Математическая модель электродвигателя постоянного тока рулевой машины жидкостного ракетного двигателя
Проведение системного анализа электромеханической следящей системы управления вектором тяги жидкостного ракетного двигателя пилотируемого транспортного корабля предполагает выполнение её декомпозиции на законченные функциональные элементы и идентификацию их параметров. В структуре электромеханической рулевой машины может быть выделен источник механической мощности — приводной магнитоэлектрический двигатель (МЭД) (электродвигатель постоянного тока с возбуждением от постоянных магнитов). В соответствии с теорией электрических машин [1], связь между электродвижущей силой якоря E я и угловой скоростью вращения вала МЭД ω, а также между вращающим моментом M и током якоря I , определяется единым электромагнитным коэффициентом
k
э
pN
= Φ, 2π a где N — полное число проводников обмотки якоря; p — число пар полюсов машины; а — число пар ветвей; Ф — магнитный поток полюсов.
Тогда E я = k эм ω; M = k эм I , а динамический процесс работы МЭД в общем случае, в соответствии с теорией электрических машин, описывается следующей системой дифференциальных уравнений [1]:
L-T- + RI + к ю = U; а эм dω k I – M = J , эм c dt где L — индуктивность обмоток якоря; R — активное сопротивление якоря; U — напряжение питания, подаваемое на МЭД; J — момент инерции вращающихся частей, приведённый к валу двигателя; Мс — статический момент или момент сопротивления, который в общем случае равен сумме нагрузочного момента M и момента сухого трения МЭД Mст (Мс = M + Mст); ω — угловая скорость вращения вала МЭД.
В некоторых публикациях [2] для моделирования МЭД используются два разных коэффициента, Cе и Cм, однако использование такой модели предполагает знание значения магнитного потока полюсов Ф, который не входит в перечень паспортных данных МЭД.
В других публикациях [3] пользуются разными обозначениями коэффициента электромагнитной скоростной связи МЭД K э и коэффициента моментной характеристики МЭД K м , однако в системе единиц измерений СИ эти коэффициенты считают равными.
Как показывает опыт работ по моделированию большого количества рулевых машин [4–6], параметры реальных МЭД часто отличаются от номинальных заявляемых данных. Повысить точность математической модели МЭД возможно путём применения вместо одного единого электромагнитного коэффициента двух различных коэффициентов математической модели: электромагнитной скоростной связи МЭД K э и моментной характеристики МЭД K м . Скорее всего, эти коэффициенты будут иметь близкие, но не равные значения. В этом случае математическую модель МЭД можно представить следующим образом:
dI
L d- + ri + К э й = U ; (1)
d ω
K м I – M – M cт = Jdt . (2)
Методы идентификации параметров L и J математической модели МЭД, влияющих только на динамические процессы работы МЭД, хорошо отработаны и общеизвестны [7], поэтому настоящая работа посвящена разработке метода идентификации параметров, влияющих на статические режимы работы МЭД.
метод идентификации параметров уточнённой математической модели электродвигателя постоянного тока с возбуждением от постоянных магнитов
Метод идентификации параметров K э , K м и других удобно продемонстрировать на примере идентификации этих параметров МЭД марки ДП32-25-4-27-IM3681-P11-Д31 [8] с возбуждением от постоянных магнитов.
Статические характеристики электродвигателей определяются с помощью экспериментальной установки, включающей в себя специальный нагрузочный стенд, позволяющий создавать на валу электродвигателя постоянные моменты сопротивления вращению. Схема такой экспериментальной установки представлена на рис. 1.
Температура и напряжение питания электродвигателя при проведении экспериментов считались постоянными ( T = const; U = const).
В процессе экспериментов определялись зависимости скорости вращения выходного вала и тока, потребляемого электродвигателем, от момента сопротивления на валу в виде следующих комплексов пар данных:
ω i = ω( Mi ); (3)
Ii = I ( Mi ). (4 )
Экспериментальные данные МЭД ДП32-25-4-27-IM3681-P11-Д31, полученные с помощью экспериментальной установки, после статистической обработки, приведены в таблице.
экспериментальные данные статических характеристик мэд
|
М , Н·м |
ω , рад/с |
I , А |
|
0 |
437 |
0,13 |
|
0,01 |
433 |
0,32 |
|
0,01 |
430 |
0,50 |
|
0,03 |
427 |
0,72 |
|
0,04 |
425 |
0,87 |
|
0,05 |
421 |
1,06 |
|
0,06 |
419 |
1,25 |
Статические характеристики МЭД при Ф = const, согласно теории электрических машин, представляют собой прямые линии, наклоненные к оси абсцисс, описываемые следующими соотношениями:
ω = ω 0 – K ω M ; (5)
I = I 0 + KIM , (6)
где ω 0 — максимальная угловая скорость при отсутствии момента сопротивления, создаваемого на валу МЭД; K ω — коэффициент изменения угловой скорости под воздействием момента, создаваемого на валу МЭД; I 0 — минимальный потребляемый ток при отсутствии момента, создаваемого на валу МЭД; KI — коэффициент приращения потребляемого тока под воздействием момента, создаваемого на валу МЭД.
Для определения входящих в выражения (5) и (6) параметров ω 0 , K ω , I 0 , KI воспользуемся методом наименьших квадратов [9].
Составляем минимизируемые функционалы:
n
F1 = ∑ г - 1
ω i – ω 0 + K ω Mi = min;
F 2 = ∑ I i – I 0 – K I M i
г - 1
= min,
где n — количество экспериментальных пар данных зависимостей (3) и (4).
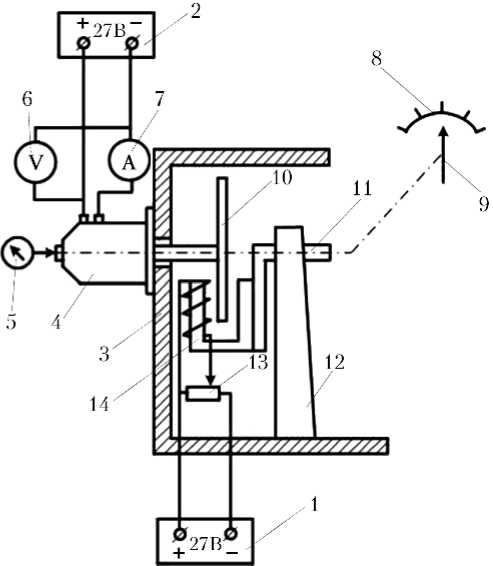
Рис. 1. Схема экспериментальной установки для снятия статических характеристик электродвигателей: 1, 2 — стабилизированные источники напряжения; 3 — нагрузочный стенд; 4 — МЭД; 5 — бесконтактный тахометр; 6 — вольтметр; 7 — амперметр; 8 — шкала; 9 — стрелка; 10 — медный диск; 11 — вал; 12 — стойка; 13 — регулировочный потенциометр; 14 — поворотный электромагнит
Необходимым условием существования минимумов выражений (7) и (8) является равенство нулю частных производных от F 1 и F 2 по каждому из входящих в эти выражения идентифицируемых параметров, т. е.
∂ F 1 = ∂ω 0
n
∑ ω i – ω 0 + K ω M i (–1) = 0;
г - 1
∂ F 1
∂ K ω
n
= ∑ ω i – ω 0 + K ω Mi Mi = 0.
г - 1
∂ F 2 ∂ I 0
∂ F 2
∂ KI =
n
∑ I i – I 0
г = 1
n ∑ г - 1
– KIMi (–1) = 0;
Ii – I 0 – KIMi Mi = 0.
Таким образом, для идентификации всех искомых параметров необходимо решить следующие системы уравнений:
nn
-Уо. + n оп - К У У, = 0;
^^ г 0 о ^^ г 1
г - 1 г - 1
n nn
У о У. - юп У У, - К У 2 = 0;
^^ г г 0 ^^ г о ^^ г 1
г = 1 г = 1 г = 1
nn
– ∑ I i + nI 0 + K I ∑ M i = 0;
i = 1 i = 1
nnn
IM – I M – K M 2 = 0. ii 0 i I i i = 1 i = 1 i = 1
Решение полученных систем уравнений возможно методом Зейделя [10], но удобнее для определения параметров ω 0 , K ω , I 0 , K I воспользоваться программой 5.18 «линейная регрессия» из работы [11]. В результате вычислений получаем:
ω 0 = 436,32 рад/с;
K ω = 296,428 рад/с·Н·м;
I 0 = 0,1346 А;
K I = 18,61 А/Н·м.
С другой стороны, математическая модель статического режима работы электродвигателя постоянного тока, получаемая, если приравнять нулю производные в уравнениях (1) и (2), и соответствующая режиму снятия характеристик исследуемого электродвигателя, описывается следующими уравнениями:
RI + Kэω = U.(9)
M + Mст = KмI.(10)
Преобразуем уравнения (9) и (10) к виду
U МR R ю = ^ -1<1г-КПГм• э эм эм
М 1
I = K ст + K M . мм
Тогда, сравнивая выражения (5) и (11), (4) и (12), параметры ω 0 , K ω , I 0 , KI можно определить следующим образом:
|
U |
М ст R |
(13) |
|
ω 0 = K – э |
K э K м ; |
|
|
R |
(14) |
|
|
K ω = K э K м |
; |
|
|
М ст I 0 = K м ; |
(15) |
|
|
K I = K 1 . |
(16) |
Из полученных уравнений (13)–(16) после преобразований получаем выражения для идентифицируемых параметров:
Kм = 1 ;(17)
I
Mст = I0Kм;(18)
Kэ = ω + K М ;(19)
0 ω ст
R = KωKэKм.(20)
Проводя вычисления по формулам (17)–(20), осуществляем идентификацию параметров K э , K м , R и М ст :
электродвигателей устанавливают в якорную цепь дополнительное сопротивление, создавая тем самым у МЭД искусственную статическую характеристику. При этом параметры статического режима работы МЭД с такой искусственной характеристикой отличаются от параметров статического режима работы МЭД с естественной характеристикой. Поэтому всегда необходимо проверять применяемый МЭД на наличие искусственной статической характеристики. Это легко сделать, проведя непосредственное измерение сопротивления якорной цепи МЭД. Если оно отличается от полученного в результате идентификации, то МЭД имеет искусственную статическую характеристику.
Для идентификации параметров статического режима работы МЭД, имеющего искусственную статическую характеристику, необходимо выполнение тех же действий, что и при идентификации параметров статического режима работы МЭД, имеющего естественную статическую характеристику. Затем выполняются следующие действия:
-
• идентифицируют параметры K м и М ст по выражениям (17) и (18);
-
• осуществляют непосредственное измерение активного сопротивления якорной цепи МЭД при нескольких положениях выходного вала
электродвигателя;
K э = 0,0616 В⋅с/рад;
K м = 0,0537 Н·м/А;
R = 0,98 Ом;
М ст = 0,00723 Н·м.
Параметры K э и K м , как это и ожидалось, имеют близкие, но не равные значения. Если бы в результате идентификации эти параметры оказались практически равными, то это подтвердило бы правильность теории электрических машин, но этого не произошло.
Однако следует отметить, что разработанный метод пригоден только для идентификации параметров статического режима работы МЭД, имеющего естественную статическую характеристику. Очень часто для снижения пускового тока МЭД производители
-
• определяют максимальное значе-
ние активного
цепи R
max
;
• вводят
в
сопротивления якорной якорную цепь МЭД дополнительное сопротивление, составляющее 1% от Rmax;
-
• подают на МЭД номинальное напряжение питания U и осуществляют осциллографирование пускового тока I п по сигналу с дополнительного сопро-
- тивления;
-
• определяют по осциллограмме пусковой ток I п ;
-
• идентифицируют параметры R и K э по выражениям
R = 4 ; (21)
п
U – IR
K э = 0 . (22)
ω 0
Последнее уравнение получено подстановкой М ст , получаемого из выражения (18), в выражение (13) и разрешением его относительно K э .
Для МЭД ДП32-25-4-27-IM3681-P11-Д31 оказалось, что измеренное активное сопротивление его якорной цепи примерно в два раза выше полученного при идентификации по выражению (20). Следовательно, этот МЭД имеет искусственную статическую характеристику. В результате осциллографи-рования пускового тока было определено его значение I п = 13,17 А. В результате вычисления по выражению (21) было определено значение активного сопротивления якорной цепи МЭД ДП32-25-4-27-IM3681-P11-Д31 R = 2,05 Ом.
Окончательное значение коэффициента электромагнитной скоростной связи было получено вычислением по выражению (22) K э = 0,061175 В·с/рад.
Графики зависимости скорости вращения вала электродвигателя и тока, потребляемого МЭД ДП32-25-4-27-IM3681-P11-Д31, от момента, создаваемого на его валу, полученные в результате моделирования статического режима работы МЭД с параметрами, определёнными в процессе идентификации, а также данные экспериментов приведены на рис. 2.
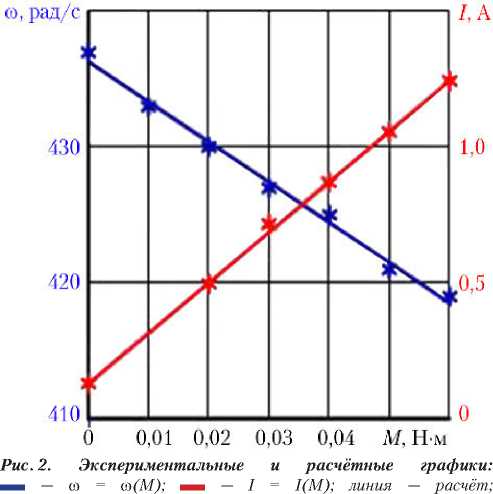
* — эксперимент
Как видно из рис. 2, расчётные графики и данные экспериментов практически совпадают, что указывает на корректность уточнённой математической модели МЭД, а также на высокую точность и эффективность разработанного метода идентификации её параметров.
заключение
В итоге описанных в настоящей статье разработок и исследований получены следующие основные результаты:
-
• разработана математическая модель МЭД, где вместо единого электромагнитного коэффициента применены два различных коэффициента математической модели: электромагнитной скоростной связи K э и моментной характеристики K м ;
-
• разработаны методы идентификации параметров уточнённой математической модели МЭД, имеющих естественную и искусственную характеристики.
Вывод по результатам проведённых исследований: для повышения точности моделирования МЭД вместо единого электромагнитного коэффициента следует применять два различных коэффициента математической модели, а именно — коэффициент электромагнитной скоростной связи и коэффициент моментной характеристики.
Список литературы Математическая модель электродвигателя постоянного тока рулевой машины жидкостного ракетного двигателя
- Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика» / 2-е изд., перераб. и доп. М.: Высшая школа, 1986. 334 с.
- Проскуряков В.С., Соболев С.В. Электрические машины постоянного тока: Учеб. пос. «Электротехника». М.: ГОУ ВПО «Уральский государственный технический университет - УПИ им. первого Президента России Б.Н. Ельцина», 2008. 41 с.
- Лыков А.Н. Системы управления электроприводами. Пермь: Изд-во Перм. гос. техн. ун-та, 2009. 191 с.
- Белоногов О.Б. Итерационные методы статического анализа двух-дроссельной электрогидравлической рулевой машины ракетных блоков // Космическая техника и технологии. 2018. № 2(21). С. 93-105.
- Белоногов О.Б. Итерационные методы статического анализа четырёх-дроссельной электрогидравлической рулевой машины ракетных блоков // Космическая техника и технологии. 2019. № 2(25). С. 115-126.
- Белоногое О.Б. Методы статического анализа электрогидравлических рулевых машин ракетных блоков // Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2015. № 5. С. 18-29.
- Глазырин А.С., Боловин Е.В. Разработка и лабораторное апробирование метода идентификации параметров электродвигателей на основе разностных схем // Известия Томского политехнического университета. 2012. Т. 321. № 4. С. 112-115.
- Номенклатурный каталог продукции. Электроприводы, электродвигатели ЗАО «МЭЛ», 2017. 223 с.
- Коломиец Л.В., Паникароеа Н.Ю. Метод наименьших квадратов. Самара: Изд-во Самарского университета, 2017. 32 с.
- Демидович В.П., Марон И.А. Основы вычислительной математики. Изд. 6-е стер. СПб: Лань, 2011. 664 с.
- Дьяконов В.П. Справочник по алгоритмам и программам на языке бейсик для персональных ЭВМ: Справочник. М.: Наука, 1989. 240 с.
