Математическая модель устройства измерения виброускорения подвижных элементов машин и механизмов

Автор: Синицин Владимир Владимирович
Рубрика: Краткие сообщения
Статья в выпуске: 3 т.14, 2014 года.
Бесплатный доступ
Предложено устройство измерения виброускорения подвижных элементов машин и механизмов, проводящее измерение непосредственно с подвижных элементов, в частности с валов и шестерен машин, причем, питание и передача данных осуществляется беспроводным способом. Описана математическая модель данного устройства, выявлены существенные преимущества над существующими аналогами с точки зрения возможностей измерения и разделения по независимым координатам виброперемещения, виброскорости и виброускорения.
Виброускорение, механическая система, акселерометр, крутильные колебания, диагностика
Короткий адрес: https://sciup.org/147154974
IDR: 147154974 | УДК: 534.08
The mathematical model of the device measuring acceleration of moving parts of machines and mechanisms
The acceleration measuring device of machines moving parts and mechanisms is proposed. This device conducts data measurement directly from mobile elements, particularly from the shafts and machines gears. Besides meals and transfers are realized wirelessly. A mathematical model of this device describes significant advantages of existing counterparts from the viewpoint of measurement capabilities and separation due to independent coordinates of vibratory displacement, vibration speed and acceleration.
Текст краткого сообщения Математическая модель устройства измерения виброускорения подвижных элементов машин и механизмов
В настоящий момент, существуют работы и исследования [1–3], доказывающие, что мониторинг состояния машин и механизмов дает наибольший экономический эффект во многих отраслях промышленности.
Одним из наиболее распространенных и надежных методов мониторинга состояния машин и механизмов является виброакустическая диагностика, сущность которой состоит в разработке и практической реализации алгоритмов оценки параметров технических состояний объекта диагностирования без его разборки в рабочих условиях по характеристикам виброакустических процессов, сопровождающих его функционирование [4, 5].
В настоящее время разработаны и применяются множество различных контактных и бесконтактных способов измерения вибраций на неподвижных и вращающихся частях механизмов [4–7].
Одним из наиболее распространенных способов измерения вибраций конструкций и механизмов (в том числе и роторных механизмов) является установка акселерометров (датчиков виброускорения) на статорных элементах машин, например на опорах подшипников. Общие руководящие принципы измерения и оценки механической вибрации статорных элементов машин описаны в [6]. Данный метод обладает достоинствами, такими как простота, надежность и др., но в то же время не позволяет, например, по полученным сигналам построить траекторию движения вала.
Для некоторых машин, например с гибкими роторами, измерения вибрации на неподвижных частях могут оказаться недостаточными. В этих случаях, наряду с вышеуказанным методом, осуществляют измерения вибрации вращающихся роторов с помощью датчиков бесконтактного типа (через измерение изменения длины оптического пути, индуктивности, емкости или вносимых потерь между двумя точками) или инерционного типа, например контактного датчика-зонда [7]. На качество измерений таким методом влияет множество факторов, таких как шероховатость и ее изменение в месте измерения вибрации, нестабильность свойств окружающей среды (например, масленый туман). Так же, описанным методом, нет возможности прямого измерения виброускорения колебаний вращающегося вала, что существенно сказывается на диагностике зарождающихся дефектов [5].
В случае диагностики электромеханических систем [8–10], например электроприводов трубопроводной арматуры, анализируют временные и спектральные характеристики токового сигнала двигателя, примененного в электромеханической системе. Описанный метод, обладая неоспоримыми достоинствами (возможностью диагностики оборудования, расположенном в труднодоступных местах, и отсутствием необходимости в дополнительных измерительных элементах на корпусе исследуемого устройства), не позволяет проводить построение траекторий движения валов, подвержен высокому зашумлению измерительного сигнала электрическими помехами и зна- чительному снижению чувствительности к дефектам, возникающим в удаленных от двигателя узлах и элементах кинематической цепи.
В данной работе предлагае тся использовать акселерометр (датчик вибр оускорения) с беспр о водными питанием и передачей данных, закрепленный на подвижном элеме нте (валу) механи зма. Это позволит получить устрой ство, измеряющее виброускорения колебаний системы контактным способом непосредственно с с амого вала без влияния на качество измерен ий девиации внешней среды и не вносящий существен ного влияния на качество работы механическ о й системы.
Устройство измерения виброускорения
Устройство измерения виб роускорения подвижных элементов машин и механизмов (рис. 1) содержит роторный и статорн ый блоки, расположенные соосно на минима льно возможно м рас стоянии друг от друга таким образом, чтобы во время движения вала не соприкасались. Ротор ный блок жестко закреплен че рез отверстие на вращающемся валу таким о бразом, чтобы рото р ный блок располагался перпе ндикулярно оси вращения вала и не создав ал дисбаланса по оси вращения. Статорный блок жес тко закреплен на корпусе механизма таким образом, чтобы отвер стие располагалось соосно с в алом, причем статорный и роторный блоки располагаются пара ллельно друг другу.
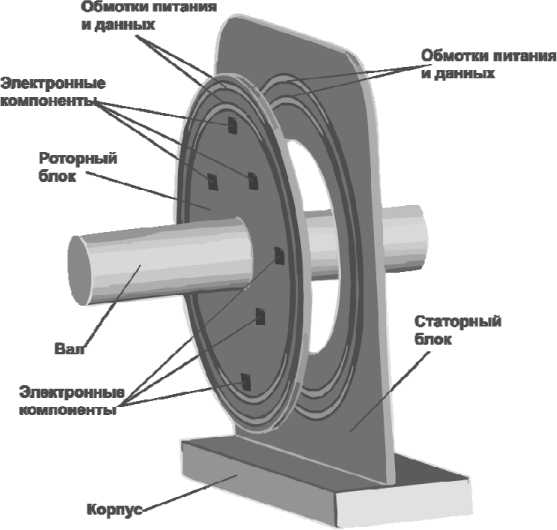
Рис. 1. Устройство измерения виброускорения подвижных элементов машин и механизмов
Роторный блок содержит о бмотку данных для приема и передачи данны х беспроводным сп о собом и обмотку питания, дл я беспроводного питания компонентов рото рного блока, причем, вообще говоря, может быть пр именена одна обмотка и для питания, и для п ередачи данных . Так же на роторном блоке устано влен, как минимум, один датчик виброуско рения и электронные компоненты для питания, фил ьтрации, предварительной обработки и пере дачи данных по бе с проводному каналу. Статорны й блок содержит обмотку данных для прием а и передач и данных беспроводным способом и обм отку питания для беспроводного питания рот орного блока, причем так же, как и на роторном блоке , может быть применена одна обмотка для питания и передачи данных. Также на статорном б локе размещены разъемы, присоединенные к обмоткам, для под ключения источника питания и приемопередатчика для получения данных.
Во время работы устройства генератор сигналов создает сигнал требуемой формы, частоты и амплитуды, затем, усилитель мощности усиливает сигнал с генератора и возбуждает обмотку питания на статорном блоке. На обмотке питания, расположенной на статорном блоке, возникает напряжение, питающее электронную схему на роторном блоке, в том числе, акселерометры, микропроцессор и приемопередатчик, благодаря чему данные, пропорциональные измеряемым вибрациям, передаются через обмотки данных на статорный блок (рис. 2). Подробно устройство измерения виброускорения подвижных элементов машин и механизмов описано в [11].
Устройство измерения вибр оускорения имеет широкий спектр областей пр именения, в част ности, для мониторинга одноступенчатой зубчатой передачи (рис. 3).
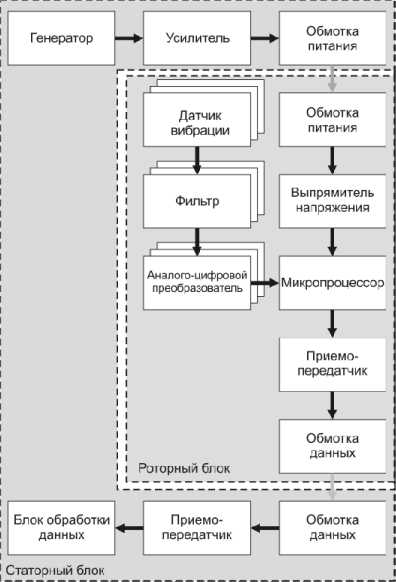
Рис. 2. Блок-схема работы устройства измерения виброускрения подвижных элементов машин и механизмов
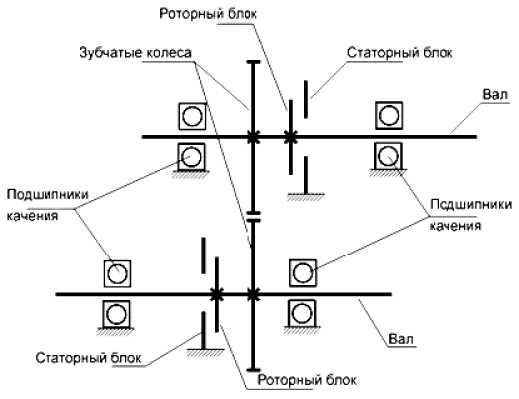
Рис. 3. Кинематическая схема одноступенчатого зубчатого редуктора с устройствами измерения виброускорения
Сочетание нескольких аксел ерометров с различной ориентацией осей чу вствительности, з а крепленных на валу или шестер не механизма, позволяет измерять и разделя ть по независимым координатам движения виброускорения в точ ке съема информации в каждый момент времени. При этом, измерительное устро йство, являясь сбалансированным по оси вр ащения элемента и обладая малой массой и размер ами (благодаря отсутствию массивных комп онентов, таких как аккумулятор), не оказывает существе нного влияния на работу механизма, не требуя регулярного обслуживания в связи с отсутст вием внутренних источников питания, а та кже частей, подве р женных интенсивному износу (токоподводов).
Таким образом, описанное выше устройство, позволяет измерять и разде лять виброускорения колебаний и движения механичес кой системы в точке съема информации по нез ависимым координ а там. По полученной с устройства информации, возможно построение траектори и движения подви ж ных элементов механической системы, при этом на качество измерений не влияет ни шероховатость поверхности в точке закрепления устройства, ни изменение свойств окружающей среды.
Так как существенной особе нностью и новизной предложенного устрой ства является место закрепления акселерометров – подвижный элемент мех анической системы, требуется математи ческое описание (модель) самог о устройства измерения, сфокусированное н а вопросах ускор ений, измеряемых датчиками.
Математическая модель устройства измерения виброускорения
Рассмотрим простейший случай: на валу механизма перпендикулярно и соосно оси вращения жестко закреплен диск, на кото ром закреплены акселерометры 1 и 2, распо ложенные на одной линии и равноотстоящие от центра диска, при этом диск – жесткий.
Для последующих рассуждений введем две системы координ ат (СК): Oxyz - неподвижная система координат, связанная с основанием механизма, при этом ось Ox - скрещивающийся пер пендикуляр к оси вращения вала, Oy - коллинеарна оси вращения вала, О- - ориентирована таким образом, чтобы Oxyz образовывали правую тройку; O 1 х в у в - в - система координат, связанная с центром вала, при этом не вращающаяся вместе с валом, причем, цент р системы координа т расположен в точке пересечени я центра диска и оси вращения вала, а так ж е ось OxB - перпендикулярна оси вращения вала, Oy в - коллинеарна оси вращения вала, Oze - ориентирована таким образом, чтобы O 1 xв yвzв образовывали правую тройку (рис. 4).
Примем, что диск соверш ает ускоренное вращение вокруг оси вала ( вокруг оси Oyв ) при этом вал колеблется вдоль оси Oz . Рассмотрим движение акселерометров, принадлежащих диску в плоскости Oxz (рис. 5).
Стоит отметить, что на акс елерометры 1 и 2 кориолисова сила не дейст вует, так как перено с ное движение является поступательным, а относительное враща тельным.
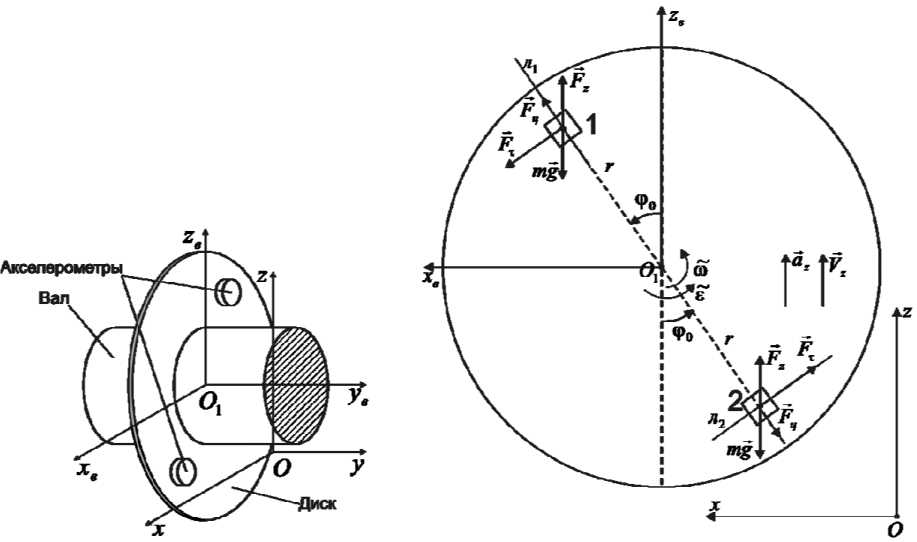
Рис. 4. Система «вал–диск» с СК Рис. 5. Система «вал–диск» в плоскости Oxz
Запишем систему векторны х уравнений движения акселерометров 1 и 2 , принимая акселер о метры одинаковыми и равноудаленными от центра диска на расстояние r и пренебрегая переход ными процессами их внутренн их компонентов, причем ось чувствительно сти первого акселер о метра ориентирована осестремительно, а второго – тангенциально (рис. 5):
ma = mg + F + F x+ F - ; ^ ^ ^ ma 2 = m g + F + F T + F - ;
F =- a n m;
-
< F - = a z m ;
-
F T = a т m ;
-
a n =to 2 r;
-
a T =£" r .
Спроецировав действующие силы на оси чувствительности каждого акселерометра, приняв, что положительное направление осей – от центра диска и против часовой стрелки, получим сис- тему уравнений (2):
ma1 = to rm + ma z cos ф - mg cos ф , ma 2 = s rm + ma z sin ф - mg sin ф ;
где ф - угол поворота вала вдоль оси вращения, g - ускорение свободного падения, a1, а2 - изме- ряемые ускорения акселерометрами 1 и 2, соответственно.
Исключив из системы (2) массу m и приняв, что s = to = ф и az = Vz = z, получили систему уравнений ускорения акселерометров 1 и 2 по оси их чувствительности (3): a1 = ф2 r - g cos ф + z cos ф,
a 2 = ф r - g sin ф + z sin ф.
В связи с тем, что рассматривается горизонтально расположенный вал и принимается, что измерения начинаются до начала движения, начальные условия для решения системы уравне- ний (3) выбраны следующим образом: z0 = 0, z0 = 0, z0 = 0, ф0 = 0,
г фо = 0, ф0 = arc tg 1
0 I
—
a i + a 2
a1 7
,
где a 0 , a 0 - измеренные акселерометрами ускорения до начала движения.
Система уравнений (3) – система дифференциальных уравнений с двумя неизвестными, решение которой дает ускорения ф крутильных колебаний вокруг оси вращения вала и z поступательных колебаний вдоль оси Oz .
Заключение
Описанное устройство виброускорения подвижных элементов машин и механизмов обладает рядом преимуществ над существующими методами измерения вибраций: не чувствительность к изменениям окружающей среды и шероховатости поверхности в точке закрепления, возможность построения траекторий движения подвижных элементов, пониженная чувствительность к электрическим помехам. В свою очередь, составленная математическая модель показывает, что устройство, кроме измерения и разделения (по независимым координатам движения) виброускорения поступательных колебаний подвижных элементов механической системы, позволяет измерять и виброускорения крутильных колебаний. Описанный подход к измерению виброускорений машин и механизмов применен впервые.
Список литературы Математическая модель устройства измерения виброускорения подвижных элементов машин и механизмов
- Rao, B.K.N. Advances in diagnostic and prognostic strategies and technologies for failure-free maintenance of industrial assets/B.K.N. Rao//Comadem, 22nd International Congress. -2009. -C. 17-38.
- Белоусов, М.Д. Метод самодиагностики термопреобразователя сопротивлений в процессе работы/М.Д. Белоусов, А.Л. Шестаков//Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». -2009. -№ 3(136). -С. 17-19.
- Белоусов, М.Д. Оценка собственного состояния средств измерения/М.Д. Белоусов, А.Л. Шестаков//Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». -2011. -№ 2 (219). -С. 19-23.
- Randall, Robert Bond. Vibration-based condition monitoring: industrial, aerospace and automotive applications/Robert Bond Randall. -John Wiley & Sons, Ltd, 2011. -289 с.
- Генкин, М.Д. Виброакустическая диагностика машин и механизмов/М.Д. Генкин, А.Г. Соколова. -М.: Машиностроение, 1987. -288 с.
- ГОСТ ИСО 10816-1-97. Вибрация. Контроль состояния машин по результатам измерений вибрации на невращающихся частях. Общие требования.
- ГОСТ ИСО 10817-1-2002. Вибрация. Системы измерений вибрации вращающихся валов. Часть 1. Устройство для снятия сигналов относительной и абсолютной вибрации.
- A diagnostic approach for electro-mechanical actuators in aerospace systems/E. Balaban, P. Bansal, P. Stoelting, A. Saxena//Aerospace conference, IEEE. -2009. -C. 1-13.
- Jangbom, Chai. Non-invasive diagnostics of motor-operated valves/Chai Jangbom, R.H. Lyon, J.H. Lang//American Control Conference. -1994. -Vol. 2. -C. 2006-2012.
- Адаменков, А.К. Ваттметрия. Диагностика электроприводной арматуры по мощности -возможность перехода от ремонта по регламенту к ремонту по техническому состоянию/А.К. Адаменков//Арматуростроение. -2006. -№ 2 (41). -С. 57-61.
- Патент на полезную модель RU 142934 U1. Устройство измерения виброускорения подвижных элементов машин и механизмов/В.В. Синицин, В.В. Синицин, А.С. Семенов, А.Л. Шестаков. -Опубл. 10.07.2014, Бюл. № 19.
