Математические модели гармонических эмоций роботов

Автор: Пенский О.Г., Ощепкова Н.В.
Журнал: Вестник Пермского университета. Математика. Механика. Информатика @vestnik-psu-mmi
Рубрика: Механика. Математическое моделирование
Статья в выпуске: 1 (44), 2019 года.
Бесплатный доступ
Приводится определение итоговой гармонической эмоции робота и исследуются свойства этой эмоции. В отличие от ранних работ построения моделей дискретного воспитания роботов, в статье сделана попытка описания непрерывной временной модели воспитания, основанной на гармонических эмоциях. Получены формулы динамического изменения коэффициентов памяти роботов, рассмотрены модели равномерно забывчивых роботов с равноценными гармоническими эмоциями. Приведены соотношения, описывающие непрерывную динамику воспитания роботов на отдельном такте. Доказана ограниченность амплитуд итоговых гармонических эмоций равномерно забывчивого робота и равноценными эмоциями.
Робот, память, воспитание робота, эмоции робота, математическое моделирование
Короткий адрес: https://sciup.org/147245425
IDR: 147245425 | УДК: 004.8:519.86.87 | DOI: 10.17072/1993-0550-2019-1-44-47
Mathematical models of the harmonic emotions of robots
The article provides a definition of the final harmonic emotion of the robot and examines the properties of this emotion. In contrast to the early work of building models of discrete upbringing of robots, the article attempts to describe a continuous temporal model of upbringing based on harmonic emotions. Formulas for dynamic changes in the memory coefficients of robots are obtained, models of uniformly forgetful robots with equivalent harmonic emotions are considered. The relations describing the continuous dynamics of raising robots on a separate cycle are given. The limited amplitudes of the final harmonic emotions of a uniformly forgetful robot and equivalent emotions are proved.
Текст научной статьи Математические модели гармонических эмоций роботов
В работе [1] приведено определение эмоции робота, которое звучит так:
"Функцию M ;( t ) назовем эмоцией робота, если она удовлетворяет условиям:
-
1. Область определения M ;( t ) :
-
t ek - 1 , t 1 0 < t i - 1 < t i <™ .
-
2. M ;( t ) - дифференцируемая на
-
3. M i ( t i - i ) = 0 и M i ( t i ) = 0 .
-
4. В области определения существует
( t 0, T o) , непрерывная и однозначная функция на [ ti - 1 , t i ] .
единственная точка z , такая, что:
z ^ t^ i .
dMf (z )
z ^ t,. и i-^ = 0".
i dt
Легко видеть что, например, функция
Mt ( t ) = p sin
TV (t - ti-1
I ti- ti -1 7
для
t G [t;_j, t ], 0 < tt_j < t <
Функцию вида (1) назовем гармонической эмоцией робота.
Математическая модель итоговой гармонической эмоции робота
Согласно работе [2] непрерывное воспитание робота удовлетворяет соотношению
Ri( t) = r( t) + e{t)Ri-, где t - текущее время, t; > t > t^p 0 < ^ (t)< 1. Текущее время удовлетворяет соотношению t = т + tt, где T - текущее время действия настоящей эмоции от начала ее проявления, ti – общее время действия всех предыдущих эмоций, R – воспитание, полученное роботом за время t .
Для робота с неабсолютной памятью справедливы соотношения 0t ( tt ) = ^ < 1 - S ,
0 < д = const < 1 , i - порядковый номер воспитательного такта.
В этой же работе введено определение элементарного воспитания робота, которое записывается равенством ti
Г = j Mt ( t ) dt . (2)
t i - 1
Нетрудно заметить, что в силу соотношения (2) элементарное воспитание, соответствующее гармонической эмоции робота, имеет вид:
T ri = 2P -L, (3)
п где — = tt — tt_j, P - амплитуда гармонической эмоции.
Определение. Гармоническую эмоцию V ( t ) , соответствующую воспитанию робота
Нетрудно заметить, что для положительных амплитуд эмоций справедливо неравенство
A i > P i .
Таким образом, амплитуда Ai итоговой гармонической эмоции робота удовлетворяет равенству (7), а поэтому итоговую гармоническую эмоцию робота можно записать в виде
( i
v -( t ) = p + E n p P j - i l J = 2 k = j
l
(п sin -(t -ti—i l-. 7
. (8)
Рассмотрим изменение воспитания робота в динамике.
Легко видеть справедливость соотношений
R , назовем итоговой гармонической эмоцией робота на такте i .
Пусть эмоция V ( t ) определяется соотношением
t ri (t) =| Mi «) d( = ti—i
—
-
P -|cos
п
- ( t — t i — i )
-
Ri =— P i - 7os - ( t — t i — i )
- 1 -
—
v,
— о +
V -( t ) = A i sin ( — ( t — t i I - i
i — 1
,
+ о ( tP I P ; — i
-
<—i i — i
+ E n f k P j — i
J = 2 k = j 7
где Ai – амплитуда итоговой гармонической эмоции.
Пусть — = const , т. е., все такты равны.
Нетрудно заметить справедливость цепочки равенств:
R i =—( P i + e p i — i + ор - i p i — 2 + ... + ор ^. о P i ) =
R i = — A i -п
cos
- ( t — t — ) -
—
U. (10)
Приравнивая правые части равенств (9) и (10) друг другу и выражая О ( t ) , получим
формулу
2 -
П
( i i
= - p. + Z n O k P j — i .
п l J = 2 k = j
Р - А
0 ( t ) = Т---- тг~\-----
I — i — i
2 P—i+E MJ l J=2 k=J
\ ^cos
- ( t — t i — i ) -
В силу определения итоговой гармонической эмоции и соотношения (4) справедливо равенство ti
t i — 1
= 2 A i - .
П
Качественное поведение коэффициента памяти
В общем виде соотношение (11) можно записать в виде
С учетом соотношений (5) и (6) получим формулу
O i ( t ) = P JCOS
-
2 -
( ‘ i
\
2 A,~ = - P i + Z WP- i
- П l J = 2 k = J
,
где D i = const < 0 ,
- ( t — t i — i ) -
— Q, (12)
которая эквивалентна равенству ii
4 = P i + X P O P — i -
J = 2 k = j
D i =
PA
(
2 P
l
i — i i — i 1
+ ^ n o P —
J = 2 k = J 7
На рис. 1 приведен общий вид функции (12) при i = 1 , t0 = 0 , Dx =- 0.1 и - = 10 . Очевидно, что рис. 1 отражает качественное поведение коэффициентов памяти робота во времени для гармонических эмоций и для любого отдельного такта.
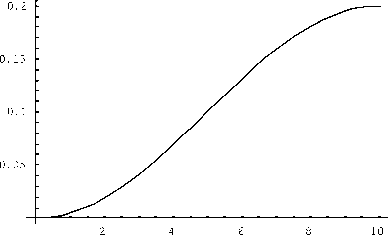
Рис. 1. Качественное поведение коэффициента памяти при гармонических эмоциях робота (по оси абсцисс – время, с; по оси ординат – значения коэффициента памяти)
Нетрудно заметить, что значение О коэффициента памяти в конце первого такта для заданных параметров численного эксперимента приближенно равно 0,2.
Исходя из вышеизложенного и с учетом равенств (6) и (13), справедлива формула
i
4 = P -----• (14)
i 1 - О
На рис. 2 изображен график изменения амплитуды гармонической итоговой эмоции в зависимости от порядкового номера i такта при коэффициенте памяти О , равном 0.2 и амплитуде гармонической эмоции, равной 5.
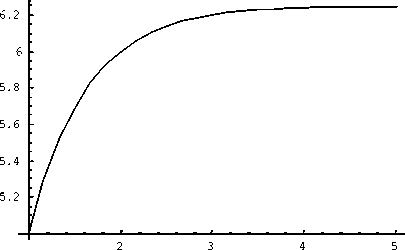
Рис. 2. Изменение амплитуды итоговой эмоции робота (ось абсцисс – порядковый номер такта, ось ординат – значение амплитуды итоговой гармонической эмоции)
Равномерно забывчивые роботы с равноценными эмоциями
Переходя к пределу при i ^ да в обеих частях соотношения (14), получим равенство
Согласно работам [3–6] непрерывное воспитание Ri равномерно забывчивых роботов с равноценными эмоциями удовлетво-
lim A, = i ^да
P
1-О
ряет соотношению
R i = q
1 - О1 - О
где r = q = const , 0 < О = О = const < 1 ,
i = 1, да .
Покажем, что для равных тактов равноценность эмоций влечет равенство амплитуд гармонических эмоций робота.
Так как эмоции равноценны, то в силу справедливости равенства (3) справедливо соотношение
-
Г = 2 р -i = 2 P -j- = 2 P -^ = r , я J я 7 я j а, следовательно, верно равенство
P = P, = P = const, ij где i = 1, да, j = 1, да.
Так как согласно формуле (14) последовательность Ai является монотонно возрастающей, то справедливо неравенство
A i <
P
i-О
В силу соотношений (6) и (14) формула для описания итоговой гармонической эмоции равномерно забывчивого робота с равноценными эмоциями примет вид
V -( t ) = P
1 - О ТО
I яSin I — (t -t^
I -
Воспитание робота, полученное на основе итоговой гармонической эмоции таких роботов, удовлетворяет соотношению
_ n 1 - О - Я / \ .
Rf = -P--। cos — (t - tj i ) -1 fi 1 - о я [ L - i-1J
Заключение
В силу того, что при создании программного обеспечения роботов разработчик может моделировать любое "психологическое" поведение роботов, то в качестве одной из моделей его эмоции можно использовать гармонические эмоции робота, основные свойства которых описаны в настоящей статье.
Приведенные математические модели динамики коэффициентов памяти робота с гармоническим эмоциями позволяют описывать воспитание робота не только к концу воспитательного такта, но и до завершения такта, т. е. являются попыткой описания непрерывной, а не дискретной модели воспитания роботов.
Список литературы Математические модели гармонических эмоций роботов
- Пенский О.Г., Шарапов Ю.А., Ощепкова Н.В. Математические модели роботов с неабсолютной памятью и приложения моделей: монография. Пермь: Изд-во ПермГУ. 2018 310 с.
- Пенский О.Г., Кузнецов А.Г., Ощепкова Н.В. Математическая модель и алгоритм накопления информации роботом с неабсолютной памятью // Вестник ЮУрГУ. Сер. Компьютерные технологии, управление, радиоэлектроника. 2018. Т. 18, № 2. С. 142-148.
- Пенский О.Г., Черников К.В. Основы математической теории эмоциональных роботов: монография. Пермь: Перм. гос. ун-т. 2010. Текст парал. рус., англ. 270 с.
- Pensky O.G., Sharapov Y.A., Chernikov K.V. Mathematical Models of Emotional Robots with a Non-Absolute Memory // Intelligent Control and Automation. USA. 2013. Vol. 4. № 2. P. 37-42.
- Pensky O.G., Mihailov V.O., Chernikov K.V. Mathematical Models of Receptivity of a Robot and a Human to Education // Intelligent Control and Automations. USA. 2014. Vol. 5, № 3. P. 25-29.
- Пенский О.Г., Черников К.В. Математические модели психологических установок роботов // Искусственный интеллект и принятие решений / РАН. М., 2013. № 2. С. 28-32.
