Математическое моделирование оптимизации и управления транспортным потоком посредством применения датчиков регистрации проходящих автомобилей и информационных устройств

Автор: Скрыпников А.В., Бурмистров Д.В., Козлов В.Г., Чернышова Е.В.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 2 (68), 2016 года.
Бесплатный доступ
В статье рассмотрено, что наиболее эффективным мероприятием для уменьшения числа дорожно-транспортных происшествий при обгонах на участках с ограниченной видимостью является своевременная информация водителей о режимах движения и об отсутствии встречного автомобиля в пределах опасного участка. Более надёжные результаты дают световые табло, включаемые автоматически при прохождении автомобилем соответствующего датчика. При этом выдаваемая световыми табло информация должна быть получена водителем на таком расстоянии от мест концентрации дорожных происшествий, при котором водитель, получив её, смог бы беспрепятственно совершить тот или иной манёвр. Для определения этого расстояния использован метод расчёта пути обгона. Анализ различных вариантов дорожной ситуации, имеющих место на участках дорог с необеспеченной видимостью, показывает, что наиболее неблагоприятными будут следующие: по одной из полос первым движется тихоходный автомобиль, за ним с временным интервалом 3 с – быстроходный, водитель которого намерен совершить обгон; по встречной полосе по истечении 3 с от момента прохода тихоходным автомобилем датчика движется быстроходный. Разработана схема организации и регулирования движения на участках дорог с необеспеченной видимостью с помощью информационных устройств. Информационные устройства, предупреждающие водителей о режимах движения на участках дорог с ограниченной видимостью, устанавливаются на подходах к опасному участку с обоих направлений при расстоянии видимости не менее 400 м и интенсивности движения, не превышающей 400 авт/ч на одну полосу. Экономический эффект от внедрения информационных устройств достигается за счёт снижения количества дорожно-транспортных происшествий на участках дорог с ограниченной видимостью в плане и профиле, а также – повышения производительности работы автомобильного транспорта.
Моделирование, скорость, автомобильная дорога, информационное устройство, путь обгона, режим движения, необеспеченная видимость
Короткий адрес: https://sciup.org/14040583
IDR: 14040583 | DOI: 10.20914/2310-1202-2016-2-102-109
Mathematical modeling and optimization of traffic control through the use of sensors detect the passing cars and information devices
The paper considers that the most effective measure to reduce the number of road accidents when overtaking in areas with limited visibility is timely information about drivers driving conditions and the lack of an oncoming car within the danger zone. More reliable results give light boards included automatically when the car passes the corresponding sensor. In this light boards issued information must be obtained by the driver at such a distance from the places of concentration of traffic accidents in which the driver received it, would be able to freely make a particular maneuver. To determine this distance, we used the method of calculating the path of overtaking. Analysis of the various options the traffic situation, taking place on the road with an unsecured appearance, shows that the most disadvantaged will be the following: one of the first bands moving slow-moving car, followed by a time interval of 3 - speedboat driver who wishes to overtake; in the opposite lane at the expiration of 3 from the moment of the passage of low-speed vehicle-speed sensor moves. A scheme for the organization and regulation of traffic on road sections with unsecured visibility with in the power of information devices. Information that warn drivers about traffic conditions on the road with limited visibility, set on the way to a dangerous site from both directions at a distance of visibility is not less than 400 m, and traffic does not exceed 400 authors / h per lane. The economic effect of the introduction of information devices is achieved by reducing the number of traffic accidents on the road with limited visibility in plan and profile, as well as by increasing the Flow rate of road traffic.
Текст научной статьи Математическое моделирование оптимизации и управления транспортным потоком посредством применения датчиков регистрации проходящих автомобилей и информационных устройств
Видимость является одним из важнейших факторов, определяющих безопасность движения по дорогам. С её недостаточной величиной чаще всего связаны дорожные происшествия при обгонах, совершаемых при высоких скоростях на вертикальных и горизонтальных кривых. Основной причиной дорожных происшествий на участках с ограниченной видимостью чаще всего бывают столкновения автомобилей. При этом характерным местом сосредоточения дорожно-транспортных происшествий являются зоны отсутствия видимости.
Наиболее эффективным мероприятием для уменьшения числа дорожно-транспортных происшествий при обгонах на участках с ограниченной видимостью является своевременная информация водителей о режимах движения и об отсутствии встречного автомобиля в пределах опасного участка. Такая информация позволяет водителям более полно оценивать дорожную обстановку и уменьшает вероятность ошибки в принятии того или иного решения.
Информация, необходимая водителю в процессе движения, может быть подана различными методами. Более надёжные результаты дают световые табло, включаемые автоматически при прохождении автомобилем соответствующего датчика. При этом выдаваемая световыми табло информация (рекомендуемая скорость движения, наличие или отсутствие автомобилей на встречной полосе и др.) должна быть получена водителем на таком расстоянии от мест концентрации дорожных происшествий (вершины вертикальной или горизонтальной кривой), при котором водитель, получив её, смог бы беспрепятственно совершить тот или иной манёвр. Для определения этого расстояния использован метод расчёта пути обгона [1].
При скоростях движения обгоняемого автомобиля V m и обгоняющего V m + А V путь обгона определяется по формуле
V
5 обг = 2 5 инт I V^ + 1 | , (1) кА V )
где S инт – расстояние между обгоняемым и обгоняющим автомобилями в начале и в конце обгона, м; V m – скорость обгоняемого автомобиля, км/ч; А V - приращение скоростей обгоняющего и обгоняемого автомобилей, км/ч.
Для облегчения расчёта пути обгона построена номограмма (рисунок 1). В первом
Vm +А V квадрате построено уравнение X = m—
.
Приняв переменное А V за параметр и строя на оси ординат шкалу V m , а на оси абсцисс – шкалу 1, получим зависимость скорости V m от Х. Параметр А V принят равным 5, 10,20 и 40 км/ч. Переменное А V при этом изменяли от 10 до 100 км/ч с интервалом 10 км/ч.
Во втором квадрате построено, по данным таблицы 1, уравнение
5 обг = 2 5 инт Х .
Приняв расстояние от обгоняющего до обгоняемого автомобиля в начале и конце обгона S инт за параметр уравнения, и используя ранее построенную горизонтальную шкалу для Х, построим на оси ординат шкалу искомой переменной S обг . Параметр S инт , принимали при этом равным 5, 10, 15, 20 и 40 м.
Пример использования номограммы.
Дано: 5 =20 м, V =70 км/ч, АV =20 км/ч. По инт m номограмме (рисунок 1) получаем 5обг = 185 м. Вычислением находим
( и ) г 70 А
5 6г = 2 5 ИН I V m - + 1 | = 220 1 70 + 1 | = 180 м.
обг инт ^лк J ^20 j
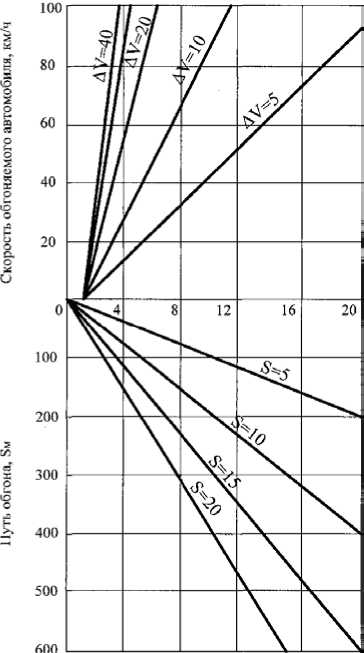
Рисунок 1. Номограмма для определения пути обгона при V m = const и А V = const
Figure 1. The nomogram for determining the way of overtaking V_ = const and when А V = const
Часто сближение и последующий обгон выполнить сразу нельзя. Обгоняющий автомобиль должен снизить скорость до скорости обгоняемого автомобиля и некоторое время двигаться за ним на небольшом расстоянии.
Когда дорога освободится, то обгоняющему автомобилю надо набрать нужную скорость, совершить обгон и в зависимости от обстоятельств снова занять место в колонне автомобилей, двигающихся со скоростью обгоняемого автомобиля. В этом случае путь обгона определяется по формуле:
S обг = 2 S инт + 2Vm4S^A (2) j 1 j 2
При этом предполагается, что ускорение разгона j1 и ускорение замедления j 2 в процессе обгона величина постоянная.
В формуле (2) пять переменных и, следовательно, для её построения потребуется четыре квадранта.
Разделив формулу (2) посредством вспомогательных переменных на четыре уравнения, получим:
X = , ^ , Y = X,\ . , Z = 2 YV m , j 1 j 2
S обг = 2 S инт + ^ .
Таблица 1
Данные расчёта переменной
Table 1
The data for calculating the variable
|
у m |
_ V +А V Значение Value X = —---- А V |
|||
|
Параметр Parameter А V |
||||
|
5 |
10 |
20 |
40 |
|
|
1 |
2 |
3 |
4 |
5 |
|
10 |
3 |
2 |
1,5 |
1,25 |
|
20 |
5 |
3 |
2 |
1,5 |
|
30 |
7 |
4 |
2,5 |
1,75 |
|
40 |
9 |
5 |
3 |
2 |
|
50 |
11 |
6 |
3,5 |
2,25 |
|
60 |
13 |
7 |
4 |
2,5 |
|
70 |
15 |
8 |
4,5 |
2,75 |
|
80 |
17 |
9 |
5 |
3 |
|
90 |
19 |
10 |
5,5 |
3,25 |
|
100 |
21 |
11 |
6 |
3,5 |
По мере возрастания интенсивности движения по дороге водителям наиболее быстроходных автомобилей приходится, приблизившись к обгоняемому автомобилю, снижать скорость до равной с ним и осуществлять обгон.
Эти четыре уравнения построены в четырёх квадрантах номограммы на рисунке 2.
В ква дранте 1 получены кривые Х = j 2— j , а в остальных квадрантах - j 1 j 2
пучки прямых, проходящих через начало координат. Во всех уравнениях за параметры приняты переменные: j 2, S инт, Vm . Параметр принят равным –1, –2, – 3, –4, – 5 м/с, параметр S инт –5, 10, 15, 20, 30 и 40 м, параметр Vm –20, 40, 60 и 80 км/ч. На номограмме дан ход решения следующего примера: j 1 =0,4 м/с 2, j 2 = –2 м/с 2, S инт = 720 м; вычислением находим S обг = 729 м.
Режим движения автомобилей определяется как дорожными условиями (планом и профилем дороги), так и обстановкой движения (наличием на дороге автомобилей, тракторов автопоездов и других транспортных средств) [1, 4]. При интенсивности движения до 100 авт/ч в одном направлении режим движения по дороге принято называть свободным. Такой режим характерен для периодов спада движения на дорогах в ночные и предутренние часы. Обгоны медленно едущих автомобилей более быстроходными в этих случаях производятся обычно беспрепятственно [4, 5].
Таблица 2
Данные расчёта пути обгона
Table 2.
The data for calculating the path of overtaking
|
Х |
Значение Value S nfi_ = 2 S„,,ТХ обг инт |
||||
|
Параметр Parameter S инт |
|||||
|
5 |
10 |
15 |
20 |
40 |
|
|
1 |
10 |
20 |
30 |
40 |
80 |
|
2 |
20 |
40 |
60 |
80 |
160 |
|
3 |
30 |
60 |
90 |
120 |
240 |
|
4 |
40 |
80 |
120 |
160 |
320 |
|
5 |
50 |
100 |
150 |
200 |
400 |
|
6 |
60 |
120 |
180 |
240 |
480 |
|
7 |
70 |
140 |
210 |
280 |
560 |
|
8 |
80 |
160 |
240 |
320 |
640 |
|
9 |
90 |
180 |
270 |
360 |
720 |
|
10 |
100 |
200 |
300 |
400 |
800 |
|
11 |
110 |
220 |
330 |
440 |
880 |
|
12 |
120 |
240 |
360 |
480 |
960 |
|
13 |
130 |
260 |
390 |
520 |
1040 |
|
14 |
140 |
280 |
420 |
560 |
1120 |
|
15 |
150 |
300 |
450 |
600 |
1200 |
|
16 |
160 |
320 |
480 |
640 |
1280 |
|
17 |
170 |
340 |
510 |
680 |
1360 |
|
18 |
180 |
360 |
540 |
720 |
1440 |
|
19 |
190 |
380 |
570 |
760 |
1520 |
|
20 |
200 |
400 |
600 |
800 |
1600 |
|
j 1 |
/ о — / 1 Значение Value Х = I22—j 1 j 1 j 2 |
||||
|
Параметр Parameter j 2 , м/с 2 |
|||||
|
-1 |
-2 |
-3 |
-4 |
-5 |
|
|
0,1 |
3,32 |
3,24 |
3,22 |
3,20 |
3,19 |
|
0,2 |
2,45 |
2,35 |
2,31 |
2,29 |
2,28 |
|
0,3 |
2,08 |
1,96 |
1,92 |
1,89 |
1,88 |
|
0,4 |
1,87 |
1,73 |
1,68 |
1,66 |
1,64 |
|
0,5 |
1,73 |
1,58 |
1,53 |
1,50 |
1,48 |
|
0,6 |
1,63 |
1,47 |
1,41 |
1,38 |
1,37 |
|
0,7 |
1,56 |
1,39 |
1,33 |
1,30 |
1,28 |
|
0,8 |
1,50 |
1,32 |
1,26 |
1,23 |
1,20 |
|
0,9 |
1,45 |
1,27 |
1,20 |
1,17 |
1,15 |
|
1 |
1,41 |
1,23 |
1,16 |
1,12 |
1,10 |
Таблица 4
Таблица 3
Данные расчёта переменной Х
Таблица 5
Данные расчёта переменной Z
Table 3
The data for calculating the variable X
Table 5
The data for calculating the variable Z
Данные расчёта переменной Y
Table 4
The data for calculating the variable Y
|
Х |
Значение Value Y = XJS^ инт |
||||||
|
Параметр Parameter S инт , м |
|||||||
|
5 |
10 |
15 |
20 |
30 |
40 |
60 |
|
|
1,4 |
3,1 |
4,42 |
5,4 |
6,3 |
7,7 |
8,9 |
10,8 |
|
1,7 |
3,8 |
5,47 |
6,8 |
7,65 |
9,3 |
10,8 |
13,2 |
|
2,0 |
4,48 |
6.32 |
7,8 |
9,0 |
10,96 |
12,7 |
15,5 |
|
2,23 |
4,99 |
7.05 |
8,7 |
10,0 |
12,2 |
14,1 |
17,3 |
|
2,44 |
5,46 |
7,71 |
9,5 |
11,0 |
13,4 |
15,4 |
18,9 |
|
2,64 |
5,9 |
8,34 |
10,3 |
11,9 |
14,5 |
16,7 |
20,5 |
|
2,83 |
6,3 |
8,94 |
11,0 |
12,7 |
15.5 |
17,9 |
21,9 |
|
3,0 |
6,7 |
9,48 |
11,7 |
13,5 |
16,4 |
18,98 |
23,2 |
|
3,16 |
7,1 |
9,98 |
12,3 |
14,2 |
17,3 |
20,0 |
24,5 |
|
3,32 |
7,4 |
10,49 |
12,95 |
14,9 |
18,2 |
21,0 |
29,1 |
|
3,46 |
7,7 |
10,93 |
13,5 |
15,6 |
18,95 |
21,9 |
26,8 |
Авторы [2, 3] показывают, что интервал между автомобилями в «пачке» на прямом горизонтальном участке, независимо от состава и интенсивности движения (до 500 авт./сут. на одной полосе), равен примерно 3 с (рисунок 3).
Распределение числа автомобилей по полосам в течение суток, как показывают наблюдения за интенсивностью движения, имеет определённую закономерность. Как правило, в определённые часы суток загрузка одной полосы значительно превышает загрузку другой, то есть интенсивность движения в одном каком-то направлении больше, чем в другом.
|
Y |
Значение Value Z = 2YV m |
|||
|
Параметр Parameter Vm , с |
||||
|
5,6 |
11,1 |
16,7 |
22,2 |
|
|
2 |
22,2 |
44,4 |
66,6 |
88,8 |
|
4 |
44,4 |
88,8 |
133,2 |
177,6 |
|
6 |
66,6 |
133,2 |
199,8 |
266,4 |
|
8 |
88,8 |
177,6 |
266,4 |
355,2 |
|
10 |
111,0 |
222,0 |
333,0 |
444,0 |
|
12 |
133,2 |
266,4 |
399,6 |
532,8 |
|
14 |
155,4 |
310,8 |
466,2 |
621,6 |
|
16 |
177,6 |
355,2 |
499,8 |
710,4 |
Таблица 6
Данные расчёта пути обгона
Table 6
The data for calculating the path of overtaking
|
Z |
Значение Value S,_ = 2 S „„_ + z обг инт |
|||||
|
Параметр Parameter S инт , м |
||||||
|
5 |
10 |
15 |
20 |
30 |
40 |
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
20 |
30 |
40 |
50 |
60 |
80 |
100 |
|
80 |
90 |
100 |
110 |
120 |
140 |
160 |
|
140 |
150 |
160 |
170 |
180 |
200 |
220 |
|
200 |
210 |
220 |
230 |
240 |
260 |
280 |
|
260 |
270 |
280 |
290 |
300 |
320 |
340 |
|
320 |
330 |
340 |
350 |
360 |
380 |
400 |
|
380 |
390 |
400 |
410 |
420 |
440 |
460 |
|
440 |
450 |
460 |
470 |
480 |
500 |
520 |
Неравномерность распределения автомобилей по длине дороги и полосам движения, колебания интенсивности в течение суток – все это предъявляет определённые требования к схеме расположения датчиков и информационных устройств на участках с необеспеченной видимостью. Анализ различных вариантов дорожной ситуации, имеющих место на участках дорог с необеспеченной видимостью, показывает, что наиболее неблагоприятным будет следующий (рисунок 4): 1) по одной из полос первым движется тихоходный автомобиль, за ним с временным интервалом 3 с – быстроходный, водитель которого намерен совершить обгон; 2) по встречной полосе по истечении 3 с от момента прохода тихоходным автомобилем датчика А движется быстроходный [5].
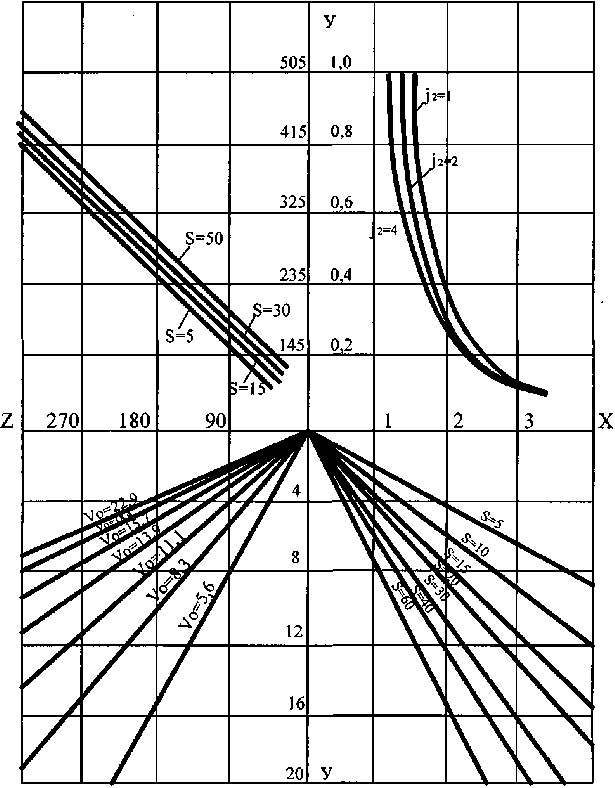
Рисунок 2. Номограмма для определения пути обгона при постоянных ускорении и замедлении
Figure 2. A nomogram for determining the path of overtaking with constant acceleration and deceleration
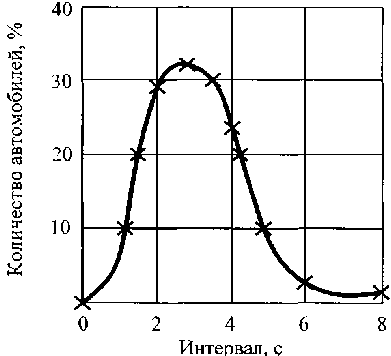
Рисунок 3. Кривая распределения интервалов между автомобилями
-
Figure 3. Distribution curve intervals between cars
В этом случае расстояние между датчиками регистрации проходящих автомобилей и информационными устройствами определится следующим образом [6]. Предположим, что автомобиль 1 проходит датчик А в момент времени to , а автомобиль 2 датчик В в момент времени 11. Тогда 11 - to > 3.
L = It К'+ уУ + д инт б 2 m
+ (2t + y+tAy" , инт 2 1 б
где tинт – временной интервал между обгоняющими и обгоняемым автомобилями в момент начала обгона; Уб - допускаемая скорость движения обгоняющего автомобиля; t2 – время движения быстроходного автомобиля на участке Lд ; Vm – скорость движения тихоходного автомобиля; t1 – момент прохождения автомобиля 2 датчика В; Уб' - допускаемая скорость движения встречного автомобиля.
Так как 2 t и НТ у б + t 2 Vm = 5 о бг, то:
L д = 5 обг + ( 2 1 „„ + 1 2 - 1 1 ) У б' . (4)
Время движения быстроходного автомобиля на участке СД равно обг t2 2tинт .
Vб
Тогда
Г
L д = 5 обг 1 + .... I- V .
к V 6 )
При У б = У б' будем иметь
Если учесть ещё длину обгоняющего и встречного автомобилей lo и l в соответственно, а также некоторый запас пути на интервал безопасности S б , то окончательно получим
L д = 2 5 обг + l o + 1 в + 5 б — V
Расстояние между информационными устройствами будет:
L y = 2 5 ОбГ + 10 + 1 в + 5 б -- ty; - 2 t инт V б
L д = 2 5 обг - V .
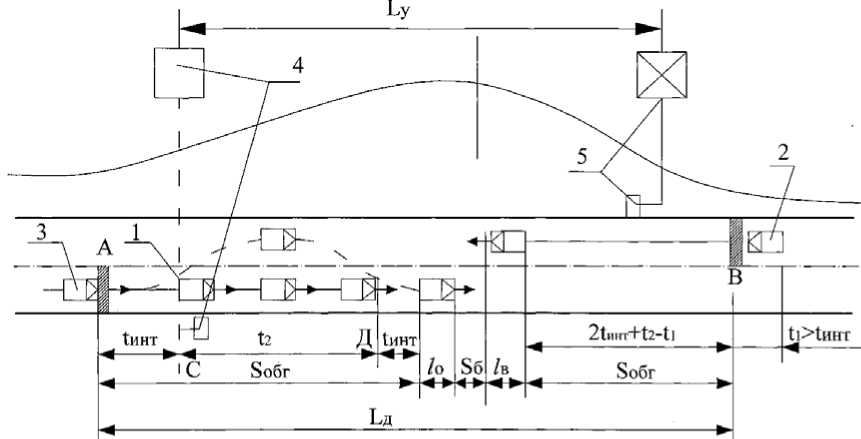
Рисунок 4. Схема расположения датчиков регистрации проходящих автомобилей и информационных устройств на участке дороги с ограниченной видимостью: А и В – датчики регистрации проходящих автомобилей; 1,2,3 – тихоходный, встречный и обгоняющий автомобили соответственно; 4,5 – информационные устройства
-
Figure 4. Sensor arrangement of registration of passing vehicles and information devices on the stretch of road with limited visibility : A and B – Sensors detect the passing vehicles; 1,2,3 – low-speed, overtaking and oncoming cars, mobiles, respectively; 4.5 – information devices
Заключение
В статье рассмотрено, что наиболее эффективным мероприятием для уменьшения числа дорожно-транспортных происшествий при обгонах на участках с ограниченной видимостью является своевременная информация водителей о режимах движения и об отсутствии встречного автомобиля в пределах опасного участка.Анализ различных вариантов дорожной ситуации, имеющих место на участках дорог с необеспеченной видимостью, показывает, что наиболее неблагоприятными будут следующие: по одной из полос первым движется тихоходный автомобиль, за ним с временным интервалом 3 с – быстроходный, водитель которого намерен совершить обгон; по встречной полосе по истечении 3 с от момента прохода тихоходным автомобилем датчика движется быстроходный.
Разработана схема организации и регулирования движения на участках дорог с необеспеченной видимостью с помощью информационных устройств. Информационные устройства, предупреждающие водителей о режимах движения на участках дорог с ограниченной видимостью, устанавливаются на подходах к опасному участку с обоих направлений при расстоянии видимости не менее 400 м и интенсивности движения, не превышающей 400 авт./ч на одну полосу.
Экономический эффект от внедрения информационных устройств достигается за счёт снижения количества дорожнотранспортных происшествий, а также за счёт повышения производительности работы автомобильного транспорта.
Вестник ВГУИТ/Proceedings of VSUET, № 2, 2016
Список литературы Математическое моделирование оптимизации и управления транспортным потоком посредством применения датчиков регистрации проходящих автомобилей и информационных устройств
- Арутюнян А. Ю. Анализ методов управления качеством дорожных покрытий//Актуальные направления научных исследований XXI века: теория и практика: сборник научных трудов по материалам международной заочной научно-практической конференции. Воронеж, 2014. Т. 2. № 5-4. С. 17-21.
- Burmistrova O.N., Sushkov S.I., Sushkov A.S., Burmistrov V.А. Development of theoretical foundations of rational distribution of industrial facilities Forest Complex/Materiály X mezinárodní vědecko -praktická Konference «Efektivní nástroje Moderních věd -2014» 27 dubna -05 května 2014 roku Díl 33 Technické vědy Praha. Publishing house «education and science» s.r.o. P. 3-10.
- Скрыпников А.В., Скворцова Т.В., Кондрашова Е.В. Пропускная способность регулируемого перекрёстка//Перспективные технологии, транспортные средства и оборудование при производстве, эксплуатации, сервисе и ремонте. Межвузовский сборник науч. тр. 2007. № 2. С. 201-204.
- Gradinescu V. et al. Adaptive traffic lights using car-to-car communication//Vehicular Technology Conference, 2007. VTC2007-Spring. IEEE 65th. 2007. P. 21-25. DOI: DOI: 10.1109/VETECS.2007.17
- Pollatsek A. et al. Driving simulators as training and evaluation tools: novice drivers//Handbook of Driving Simulation for Engineering, Medicine, and Psychology. 2011. P. 334-337.
- Скрыпников А.В., Умаров М.М., Чернышова Е.В. Роль состояния лесовозных автомобильных дорог в обеспечении удобства и безопасности движения в неблагоприятные периоды года//Актуальные вопросы науки, технологии и производства. 2015. № 2 (6). С. 66-67
