Математическое обеспечение и особенности управления несинхронизированным набором мобильных объектов

Автор: И. А. Черноиваненко
Журнал: Informatics. Economics. Management - Информатика. Экономика. Управление.
Рубрика: Информатика, вычислительная техника
Статья в выпуске: 4 (1), 2025 года.
Бесплатный доступ
В статье рассматривается проблема эффективного управления несинхронизированным набором мобильных объектов. Для решения этой задачи предлагается подробно изучить существующие стратегии управления систем автономных мобильных объектов (АМО) с целью выбора наиболее практичного решения. В статье проанализированы несколько традиционных подходов к управлению для систем с несколькими АМО, а именно: методы, основанные на математическом обеспечении «ведущий-ведомые объекты» (ВВО), виртуальной структуре (ВС), поведении и консенсусе. Результаты анализа существующих решений показали, что подходы, основанные на ВВО, ВС и поведении, могут быть использованы для решения задач управления формированием АМО, однако у них есть недостатки. Метод, основанный на ВВО, не обладает надежной связью, а решения, основанные на ВС, не подходят для распределенной архитектуры из-за необходимости применения большого количества коммуникаций и вычислений. Подходы, основанные на поведении, трудно моделировать и они не могут гарантировать стабильность системы. Решить проблемы вышеперечисленных методов способен консенсусный подход, который основан на теории графов. Более того, результаты некоторых исследований показали, что подходы, основанные на ВВО, ВС и поведении, могут быть объединены в общую структуру консенсусного управления.
Автономные мобильные объекты, управление формированием, консенсусное управление, децентрализация, централизованная архитектура.
Короткий адрес: https://sciup.org/14132657
IDR: 14132657 | УДК: 004.7 + 004.9 + 519.8 | DOI: 10.47813/2782-5280-2025-4-1-1015-1021
Текст статьи Математическое обеспечение и особенности управления несинхронизированным набором мобильных объектов
DOI:
С развитием электроники и программного обеспечения растет число автономных мобильных объектов (АМО), способных выполнять скоординированные действия. В последние десятилетия АМО вызвали большой исследовательский интерес, поскольку они широко используются в военных и гражданских целях для выполнения ряда задач высокого риска (например, поисково-спасательных операций, наблюдения, транспортировки тяжелых грузов, мониторинга стихийных бедствий, обнаружения радиации, составления контурных карт, прогнозирования погоды и ретрансляции телекоммуникационных данных) [1]. Из-за небольшого размера и низкой производительности процессора один AMO способен выполнять только простые задачи. Напротив, рой обладает такими преимуществами, как высокая эффективность, широкий охват, низкие затраты топлива и времени, повышенная надежность, отказоустойчивость и высокая гибкость. Кроме того, формирование AMO может создавать новые функциональные возможности, используя разные несинхронизированные наборы мобильных объектов. Более того, для некоторых задач локализации может потребоваться, чтобы несколько AMO обменивались информацией (например, о местоположении) друг с другом по беспроводной связи [2] (рисунок 1).
Рисунок 1. Автономная система мобильных
ОБЪЕКТОВ .
Figure 1. Autonomous system of mobile objects.
Основная задача несинхронизированного набора мобильных объектов – скорректировать местоположение для выполнения автономных скоординированных действий.
Новые разработки в области управления и связи привели к появлению множества алгоритмов для управления роем АМО. За последние несколько лет были разработаны алгоритмы централизованного и распределенного (или децентрализованного) управления для многих конкретных сценариев применения [3]. На сегодняшний день существует несколько традиционных подходов к управлению системами с несколькими АМО, например, методы, основанные на математическом обеспечении «ведущий-ведомые объекты» (ВВО) [4], виртуальной структуре (ВС) [5], поведении [6] и консенсусе [7].
МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ УПРАВЛЕНИЯ
НЕСИНХРОНИЗИРОВАННЫМ НАБОРОМ МОБИЛЬНЫХ ОБЪЕКТОВ
Последние годы широко изучаются различные виды стратегий управления и планирования движения. Существует четыре традиционных подхода к управлению роем, а именно методы, основанные на ВВО, ВС, поведении и консенсусе. В большинстве исследовательских работ, посвященных управлению роем, используется один или несколько из этих подходов в централизованной, распределенной или гибридной архитектуре.
Управление «ведущий-ВЕДОМЫЕ объекты»
В исследовании [4] был предложен подход ВВО для роя АМО. В соответствии с подходом управления ВВО, один АМО выбирается в качестве ведущего объекта группы с полным доступом ко всей навигационной информации и действует как ориентир в формировании. Другие АМО рассматриваются как ведомые. Чтобы сохранить форму роя, ведущий руководит действиями ведомых АМО, соблюдая желаемую дистанцию и угол наклона.
Подход ВВО является широко распространенной стратегией, поскольку его относительно просто разработать и реализовать на практике. Из-за наличия ведущего объекта подход ВВО устойчив к случайным факторам. Подход ВВО обычно использует централизованную коммуникационную архитектуру, которая требует, чтобы ведомые АМО в составе несинхронизированного набора мобильных объектов устанавливали связь только с ведущим объектом. В исследовании [8] предложена теоретико-графовая формулировка ВВО-подхода, которая раскрыла внутренние свойства ВВО.
При использовании подхода ВВО обеспечивается связь между ведущим и ведомыми объектами таким образом, чтобы ведущий мог постоянно отслеживать статус ведомых объектов, а они могли обмениваться информацией на расстоянии и своевременно предоставлять ее. Иногда АМО в математическом обеспечении ВВО работают независимо, и ведущий не получает ответа от ведомых объектов. Безусловно, передача информации от ведомых к ведущему объекту может повысить надежность формирования.
Общий объем передаваемой информации в математическом обеспечении ВВО, как правило, меньше, чем в распределенной архитектуре, поэтому эффективность обмена намного выше. Однако основным недостатком математического обеспечения ВВО является его высокая зависимость от производительности ведущего АМО. Роем трудно управлять и поддерживать его, особенно когда ведущий АМО выходит из строя или связь между ведущим и ведомыми объектами нарушается.
Управление на основе виртуальной
СТРУКТУРЫ
Подход ВС был предложен в работе [5]. Основная концепция ВС заключается в том, чтобы рассматривать форму роя как виртуальную структуру или твердое тело. АМО поддерживают жесткую геометрическую взаимосвязь друг с другом, чтобы свести к минимуму ошибки определения местоположения между ВС и фактическими позициями группы, а положения ВС определяются состоянием несинхронизированного набора мобильных объектов. Для достижения этой цели АМО управляются виртуальными структурами на основе двунаправленной схемы управления. Отказоустойчивость является одним из наиболее привлекательных преимуществ подхода ВС.
Однако метод ВС не подходит для задач модификации роя. Изменение структуры формирования требует изменения конструкции ВС, а вычислительная нагрузка на формирование высока. Из-за негибкости управления роем, подход ВС имеет ограниченные возможности для предотвращения столкновений.
Как и в случае подхода ВВО, для подхода ВС важен надежный канал связи, поскольку каждый АМО зависит от данных, получаемых в режиме реального времени. Более того, когда пара АМО находится в заранее определенном диапазоне связи, управляющие воздействия могут быть рассчитаны не только на основе собственного местоположения и скорости, но и на основе заданного диапазона связи, чтобы обеспечить предотвращение столкновений между парой АМО [9].
Управление на основе поведения
В работе [6] авторы впервые предложили управление роем, основанное на поведении. Задача управления группой была решена с помощью гибридной векторно-взвешенной функции управления, которая генерирует управляющие команды на основе различных задач роя, таких как движение к цели, обход статических препятствий, уклонение от роботов и поддержание несинхронизированного набора мобильных объектов. В соответствии с общими требованиями миссии были разработаны четыре различные схемы управления перемещением, и каждой схеме было присвоено значение усиления с точки зрения конкретной миссии или условий движения. Более высокий выигрыш для контроллеров означает более высокую важность соответствующего поведения, и итоговый контроль определяется как взвешенная комбинация этих выигрышей. Реализуя управление роем на основе поведения, можно легко поддерживать формирование и предотвращать столкновения.
Однако конструкция контроллера для этого подхода не основана на кинематических/динамических характеристиках АМО. Таким образом, сложно анализировать устойчивость системы с помощью математики, что затрудняет теоретическое обоснование эффективности этого метода управления. Недостаточный анализ стабильности системы делает ее непригодной для крупномасштабных сетей АМО. Несмотря на этот недостаток, благодаря своей способности выполнять различные задачи с помощью одной команды управления, управление несинхронизированным набором мобильных объектов на основе поведения по-прежнему широко используется мобильными роботами и платформами беспилотных наземных транспортных средств. Метод, основанный на поведении, имеет более гибкую форму построения.
Не существует единого решения, подходящего для всех сценариев. В открытом пространстве, где стабильность системы является приоритетом, можно использовать метод ВВО или ВС. В сложной среде управление берет на себя метод, основанный на поведении. В будущем могут появиться гибридные схемы управления. В работе [10] был предложен метод управления гибридным роем, основанный на математическом обеспечении ВВО и стратегии управления поведением. Он основан на смещении относительного положения между виртуальными целями роя и транспортными средствами сопровождения. Такой гибридный подход обладает как особенностями активной схемы управления, основанной на поведении, так и структурой виртуальной цели. Математическое обеспечение ВВО формирует и поддерживает формирование, в то время как метод, основанный на поведении, и подход ВС в основном сосредоточены на планировании движения отдельных мобильных объектов. Благодаря математическому обеспечению ВВО между ведущим и ведомыми объектами был создан механизм контроля, позволяющий обеспечить целостность несинхронизированного набора мобильных объектов при изменении количества контролируемых транспортных средств, а также установить взаимосвязь между ведущим и каждым ведомым объектом, чтобы ведущий мог постоянно контролировать статус ведомых объектов.
Хотя подходы, основанные на ВВО, ВС и поведении, могут быть использованы для решения задач управления роем АМО, у них есть соответствующие недостатки. Например, подход, основанный на ВВО, не обладает надежной связью, а подходы, основанные на ВС, не подходят для распределенной реализации, поскольку требуют большого количества коммуникаций и вычислений. Подходы, основанные на поведении, трудно моделировать и они не могут гарантировать стабильность системы.
Управление на основе консенсуса
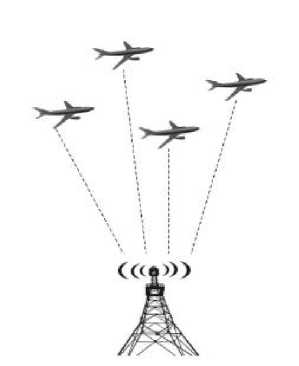
С точки зрения управления, использование централизованного подхода для управления формированием АМО является естественным методом, при условии, что можно получить информацию о состоянии всех объектов. Центральная станция собирает информацию о состоянии всех АМО, принимает управляющее решение и отправляет соответствующие управляющие команды каждому из них. Однако в большинстве случаев применения несинхронизированных наборов мобильных объектов некоторые среды могут быть неидеальными, поэтому они не могут использовать централизованные подходы. Например, центральная станция не может получить полную информацию о состоянии из-за проблем со связью, таких как ограниченный диапазон передаваемой мощности. Еще одним недостатком централизованного подхода является то, что сложность центральной станции возрастает с увеличением числа АМО. Кроме того, любые изменения в топологии сети могут потребовать перепроектирования центрального контроллера.
С точки зрения распределенного управления (или совместного контроля), центральный контроллер не задействован, и каждый АМО принимает свои собственные решения, используя информацию о состоянии самого себя и своих соседей. Подход к распределенному управлению имеет много преимуществ, таких как масштабируемость, гибкость и надежность.
На рисунке 2 показаны централизованная и децентрализованная (распределенная) архитектуры.
(a)

(b)
Рисунок 2. ( А ) централизованная архитектура; ( B ) ДЕЦЕНТРАЛИЗОВАННАЯ ( РАСПРЕДЕЛЕННАЯ ) АРХИТЕКТУРА .
Figure 2. (a) centralized architecture; (b) decentralized (distributed) architecture.
Для совместного управления системами с несколькими АМО существуют две широко изученные проблемы согласования:
-
1. В централизованной архитектуре основной задачей является решение проблемы согласования ВВО (также известная как проблема совместного отслеживания, контроля закрепления или контроля отслеживания синхронизации). Существует ведущий объект, который действует как генератор команд и генерирует желаемую траекторию, и на поведение которого не влияют ведомые объекты. Все ведомые объекты управляются так, чтобы отслеживать ведущего.
-
2. В распределенной архитектуре необходимо решить проблему консенсуса без участия ведущего объекта (также известную как проблема синхронизации или совместного регулирования). Распределенные контроллеры предназначены для каждого АМО, при этом, все АМО играют равную роль и, как правило, достигают консенсуса.
Большинство существующих исследований были посвящены консенсусу интеграторов первого или второго порядка в линейных системах, не зависящих от времени. На сегодняшний день разработан консенсус в отношении линейных систем высокого порядка и даже динамических нелинейных систем высокого порядка.
Хотя использование сетей связи для обмена данными между АМО имеет ряд преимуществ, таких как недорогая установка и техническое обслуживание, наличие сети связи также создает проблемы при проектировании контроллера. Несмотря на то, что мы могли бы принять соответствующие меры для контроля сети связи, задержка пакетов и сбои в передаче данных практически неизбежны и могут возникать неожиданно. Задержка по времени или сбой в работе могут ухудшить производительность систем управления и даже дестабилизировать их. Таким образом, учет временных задержек при проектировании контроллеров для роев АМО также является активно развивающейся областью исследований. Существует взаимосвязь между эффективностью достижения консенсуса и устойчивостью к задержкам.
Более того, предотвращение столкновений/препятствий является практической задачей координации движения нескольких АМО, которую следует учитывать при проектировании системы управления несинхронизированным набором мобильных объектов. Чтобы избежать столкновений с препятствиями и другими АМО, для разработки соответствующих методов обычно используются понятия потенциальных полей и сил отталкивания.
В последние годы на основе метода консенсуса были широко изучены различные стратегии управления роем для распределенной координации нескольких АМО. Однако управление роем зависит от динамики отдельного АМО и структуры всей сети, которая может быть смоделирована с помощью направленных или ненаправленных графов. Топологию взаимодействия между АМО можно считать фиксированной или динамической. Поскольку каналы связи могут выходить из строя и могут создаваться новые каналы, формирование систем с несколькими АМО в основном зависит от времени.
ЗАКЛЮЧЕНИЕ
Математическое обеспечение, основанное на ВВО, ВС и поведении, может быть применено для решения задач управления роем АМО, однако каждая из них имеет определенные недостатки. Например, подходам, основанным на ВВО, не хватает надежности из-за наличия ведущего объекта и нехватки обратной связи от ведомых объектов. Подходы, основанные на ВС, не подходят для распределенной реализации и не являются гибкими в отношении деформации формы несинхронизированного набора мобильных объектов. Они также не позволяют избежать столкновений и требуют значительных средств связи и вычислений. Подходы, основанные на поведении, нелегко моделировать, и они затрудняют достижение стабильности системы.
В свою очередь, с развитием теории консенсуса, многие исследования показали, что консенсусные решения, основанные на теории графов, могут быть использованы для решения задач управления формированием. Более того, благодаря результатам некоторых исследований удалось обнаружить, что традиционные методы, основанные на ВВО, ВС и поведении, можно рассматривать как частные случаи подходов, основанных на консенсусе.
